Изобретение относится к робототехнике и может найти применение в качестве мобильного робота и самопередвигающегося устройства.
Известна система с чистящим роботом, способная управлять чистящим роботом с большого расстояния, используя мобильную сеть связи. Система содержит чистящий робот для выполнения уборки при свободном перемещении в помещении с помощью передаваемых управляющих данных, содержащихся в сигнале мобильной связи, ретрансляционный блок мобильной связи для приема сигнала мобильной связи, передаваемого от чистящего робота, и другого сигнала мобильной связи для управления чистящим роботом, и пересылающий сигналы мобильной связи к соответствующим блокам, и терминал мобильной связи для передачи чистящему роботу команды для действий через ретрансляционный блок мобильной связи. Изобретение позволит управлять процессом уборки с большого расстояния, используя терминал мобильной связи, позволит изготовить чистящий робот в более компактном виде и его себестоимость будет снижена (см. патент РФ на изобретение № 2212995, кл. B 25 J 5/00, 2003). Недостатком известного устройства является невысокая эффективность его функционирования.
Наиболее близким к предложенному является мобильный робот, содержащий размещенные в корпусе устройства для перемещения робота блок обнаружения препятствия, блок определения текущего местоположения робота и блок наблюдения за пространством перед роботом, соединенные посредством соответствующих информационных каналов с блоком управления, источник питания, соединенный первыми выводами с соответствующими выводами блока обнаружения препятствия, блока определения текущего местоположения робота и блока наблюдения за пространством перед роботом, подключенного входом к выходу, по меньшей мере, одной видеокамеры наблюдения, установленной на корпусе устройства для перемещения робота (см. патент РФ на изобретение № 2210492, кл. В 25 J 5/00, 2003). Недостатком данного устройства также является невысокая эффективность его функционирования.
Задачей данного изобретения является повышение эффективности функционирования мобильного робота, при этом достигается технический результат, заключающийся в повышении эффективности его управляемости.
Данный технический результат достигается за счет того, что мобильный робот, содержащий размещенные в корпусе устройства для перемещения робота блок обнаружения препятствия, блок определения текущего местоположения робота и блок наблюдения за пространством перед роботом, соединенные посредством соответствующих информационных каналов с блоком управления, источник питания, соединенный первыми выводами с соответствующими выводами блока обнаружения препятствия, блока определения текущего местоположения робота и блока наблюдения за пространством перед роботом, подключенного входом к выходу, по меньшей мере, одной видеокамеры наблюдения, установленной на корпусе устройства для перемещения робота, согласно данному изобретению имеет перемещающееся средство с размещенными на нем станцией мобильной связи, выполненной с возможностью доступа в ИНТЕРНЕТ, и пультом дистанционного управления, выполненным в виде, по меньшей мере, одного персонального компьютера, соединенного информационным каналом со станцией мобильной связи, устройство для перемещения робота выполнено в виде самодвижущейся тележки, которая кинематически связана с перемещающимся средством, на осях ведущих колес самодвижущейся тележки размещены приводные элементы двигателей постоянного тока, которые выводами связаны с вторыми выводами источника питания, а управляющими входами - с выходами блока управления, на дисках ведомых колес самодвижущейся тележки установлены фотоимпульсные датчики, соединенные выходами с входами блока определения пройденного роботом расстояния, и акселерометры, подключенные выходами к входам блока измерения ускорения при движении робота, блок обнаружения препятствия снабжен установленными на корпусе самодвижущейся тележки, по меньшей мере, одним передатчиком ультразвукового сигнала и, по меньшей мере, одним приемником ультразвукового сигнала, блок определения пройденного роботом расстояния и блок измерения ускорения при движении робота размещены на корпусе самодвижущейся тележки и связаны своими выводами с третьими выводами источника питания, а блок управления дополнительными информационными каналами соединен с блоком определения пройденного роботом расстояния, блоком измерения ускорения при движении робота, станцией мобильной связи и, по меньшей мере, одним персональным компьютером, причем источник питания четвертыми выводами соединен с соответствующими выводами станции мобильной связи и, по меньшей мере, одного персонального компьютера, а также за счет того, что он может иметь, по меньшей мере, один датчик микроволнового сигнала, размещенный на корпусе самодвижущейся тележки и соединенный выходом с входом блока анализа обнаруженного препятствия, расположенного на самодвижущейся тележке и выполненного с возможностью обмена информацией с блоком управления по информационному каналу, и, кроме того, за счет того, что он может иметь, по меньшей мере, один источник резервного питания, соединенный выводами с первыми и/или вторыми, и/или третьими, и/или четвертыми выводами источника питания и размещенный на самодвижущейся тележке или перемещающемся средстве.
Технический результат достигается также за счет того, что мобильный робот может иметь средство освещения, расположенное на корпусе самодвижущейся тележки в зоне действия, по меньшей мере, одной видеокамеры наблюдения, и за счет того, что средство освещения может быть выполнено в виде, по меньшей мере, одного светотехнического аппарата и, кроме того, за счет того, что, по меньшей мере, один персональный компьютер может быть выполнен с возможностью обработки сигнала, поступающего с по меньшей мере одной видеокамеры наблюдения видеоизображения с последующим запоминанием, а также за счет того, что он может иметь, по меньшей мере, одну удаленную станцию мобильной связи, выполненную с возможностью доступа в ИНТЕРНЕТ, и соединенный, по меньшей мере, одним информационным каналом с по меньшей мере одним дополнительным персональным компьютером.
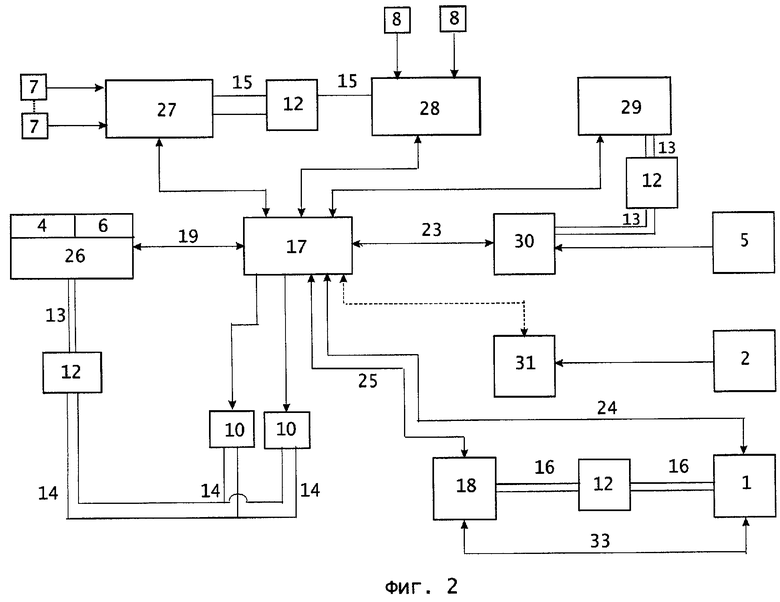
Сущность предлагаемого изобретения поясняется чертежами, где на фиг.1 представлен общий вид предлагаемого мобильного робота, на фиг.2 показана функциональная блок-схема мобильного робота.
Мобильный робот содержит (см. фиг.1 и 2) пульт 1 дистанционного управления в виде персонального компьютера, расположенного на перемещающемся средстве, датчик 2 микроволнового сигнала, движущуюся тележку 3, приемник 4 ультразвукового сигнала, видеокамеру 5 наблюдения, передатчик 6 ультразвукового сигнала, фотоимпульсные датчики 7, установленные на ведомых колесах самодвижущейся тележки 3, акселерометры 8, расположенные также на ведомых колесах самодвижущейся тележки 3, резервный элемент 9 питания, двигатель 10 постоянного тока, приводные элементы которых размещены на осях ведущих колес самодвижущейся тележки 3, кабель 11, соединяющий узлы, размещенные на самодвижущейся тележке 3, с пультом 1 дистанционного управления. Устройство также содержит (фиг.2) источник 12 питания с первыми 13, вторыми 14, третьими 15 и четвертыми 16 выводами, соединенными с выводами соответствующих блоков устройства. В устройство также входят блок 17 управления, станция 18 мобильной связи, связанная с пультом 1 дистанционного управления, а также информационные каналы 19, 20, 21, 22, 23, 24 и 25, соединяющие блоки 17 управления, соответственно, с блоком 26 обнаружения препятствия, блоком 27 определения пройденного роботом расстояния, блоком 28 измерения ускорения при движении робота, блоком 29 определения текущего местоположения робота, блоком 30 наблюдения за пространством перед роботом, пультом 1 дистанционного управления и станцией мобильной связи. Устройство также может содержать блок 31 анализа обнаруженного препятствия, который с помощью информационного канала 32 подключен к блоку 17 управления, при этом вход блока 31 соединен с выходом датчика 2 микроволнового сигнала. Блоки 1 и 18 связаны между собой информационным каналом 33.
Принцип работы мобильного робота заключается в следующем.
Мобильный робот состоит из собственно самого мобильного робота и пульта 1 дистанционного управления в виде персонального компьютера (ПК). Пульт 1 дистанционного управления размещается на перемещающемся средстве (прицепе) к роботу и состоит из ПК (ноутбука), к которому через порт подсоединена станция 18 мобильной связи (сотовый телефон), имеющая доступ в INTERNET через GPRS канал. Робот, подключенный к ПК, управляется при помощи программного обеспечения в виде пакета «LABVIEW 6.0» под операционную систему Microsoft Windows. На двух компьютерах установлены два комплекта программного обеспечения. Один комплект предназначен для робота, подсоединенного к ПК, и состоит из Microsoft Windows NT 4.0 и программного обеспечения в виде основного компонента «LABVIEW 6.0» для управления роботом. Второй компьютер с другим комплектом программного обеспечения имеет доступ в глобальную компьютерную сеть (Internet) при помощи стандартного компонента Microsoft Windows - Internet Explorer, но используется Netscape Navigator, так же как и ПК, к которому подсоединен робот, которым управляют удаленно. Второй компьютер, при помощи которого дистанционно управляют мобильным роботом, представляет собой ноутбук с подсоединенной к нему через USB порт станцией мобильной связи, имеющей доступ в INTERNET через GPRS канал.
Перечень составляющих для управления мобильным роботом на большом расстоянии включает следующие базовые элементы:
1. ПК с подсоединенной к нему станцией мобильной связи (например, сотовый телефон) через USB-порт компьютера.
2. Радиоканал с GPRS и модемом в аппарате.
3. Базовая станция с ретранслятором компании сотовой связи.
4. Представитель услуг глобальной компьютерной сети Internet (Internet-провайдер).
5. Управляемый удаленно мобильный робот, соединенный с прицепом, где находится ноутбук, связанный с устройствами робота и к которому подключен сотовый телефон с GPRS-функцией.
6. Наличие доступа в глобальную компьютерную сеть - INTERNET у компьютера с роботом через радиоканал GPRS сотового телефона.
7. Наличие устойчивой связи на всех участках компьютерной сети (INTERNET).
Мобильный робот представляет из себя самодвижущуюся тележку с прицепом, на котором имеется пульт 1 дистанционного управления в виде ПК (ноутбука) с подсоединенным к нему сотовым телефоном (станция мобильной связи), имеющим доступ в INTERNET. Компьютер, через который происходит управление за несколько сотен или тысяч километров, имеет тоже доступ в INTERNET при помощи сотового телефона.
Оператор, управляющий роботом дистанционно, может запускать двигатели 10 постоянного тока робота попеременно или вместе. Тем самым, робот может двигаться вперед и назад, а если бы были гусеницы - разворачиваться на любой угол. Изображение с видеокамеры 5 перед роботом также наблюдается, наличие препятствий перед роботом и над ним выдаются в пакете «LABVIEW 6.0». Изображение с видеокамеры робота можно наблюдать удаленно через NETSCAPE NAVIGATOR через INTERNET.
При этом осуществление управления ведомой части мобильного робота происходит через INTERNET с применением базовой и рабочих станцией ретрансляторов, которые обслуживаются компанией сотовой связи.
Мобильный робот приводится в движение двигателями 10 постоянного тока, расположенными на ведущих колесах самодвижущейся тележки. Они могут управляться с помощью блока 17 управления, что придает ему большую маневренность.
Приемник 4 и передатчик 6 ультразвукового сигнала соединены с блоком 26 обнаружения препятствия, что позволяет получать информацию о препятствии с возможностью передачи этой информации через канал 19 в блок 17 управления. Фотоимпульсные датчики 7 подключены к блоку 27 пройденного роботом расстояния. Информация об этом расстоянии передается из блока 27 по информационному каналу 20 в блок 17 управления. Акселерометры 8 позволяют измерять ускорение движения робота и по соответствующим линиям передавать данную информацию в блок 28 измерения ускорения при движении робота и после преобразования передавать ее в блок 17 управления. Блок 29 определения текущего местоположения робота соединен с помощью информационного канала 22 с блоком 17 управления, который посылает в блок 29 данные для обработки и представления почтовой информации в систему, определяющую функционирование мобильного робота. Видеокамера 5, размещенная для наблюдения за пространством перед роботом, передает свою информацию в блок 30 наблюдения за пространством перед роботом, который через информационный канал 23 выдает соответствующую информацию в блок 17 управления, который через каналы 24 и 25 передает информацию, соответственно, в пульт 1 дистанционного управления и станцию 18 мобильной связи. На пульте 1 дистанционного управления информация просматривается на экране монитора и может быть запомнена в соответствующем узле блока 1. Для получения четкого изображения рядом с видеокамерой 5 располагают светотехнический аппарат. Информация из пульта 1 дистанционного управления поступает в станцию 18 мобильной связи, которая может передавать обработанную информацию через INTERNET на другие станции мобильной связи для осуществления управления работой мобильного робота. Датчик 2 микроволнового сигнала, расположенный на корпусе робота, обнаруживает препятствия над роботом и может передавать сигналы в блок 31 анализа обнаруженного препятствия, который может передавать информацию в блок 17 управления через информационный канал 32. Включение узла 2 и блока 31 в функционирование мобильного робота не является обязательным, т.к. для включения технических задач роботу не всегда нужны эти два узла.
Часть параметров с перемещающегося или находящегося на месте робота анализируется и строится трехмерная модель движущегося во времени реального мобильного робота. Пульт 1 дистанционного управления состоит из персонального компьютера с процессором Pentium 2 или выше и позволяет полностью анализировать параметры от устройств мобильного робота и управлять его движением.
Важную роль в функционировании робота система отводит работе блока 17 управления, который управляет и работой самого мобильного робота и обменом информацией между всеми входящими в данную систему блоками. Блок 26 обнаружения препятствия обменивается информацией по информационным каналам с блоком 27 определения пройденного роботом расстояния, блоком 28 измерения ускорения при движении робота, блоком 29 определения текущего местоположения робота и блоком 30 наблюдения за пространством перед роботом. Блок 17 управления обрабатывает всю информацию, проходящую через него, и посылает ее на пульт 1 дистанционного управления и на станцию 18 мобильной связи. После рассмотрения и анализа информации с помощью пульта 1 формируются соответствующие информационные и управляющие сигналы, которые при поступлении на станцию 18 могут быть переданы и ретранслированы в INTERNET для дальнейшего принятия решения по работе мобильного робота с помощью удаленной станции мобильной связи.
Данное устройство используется в робототехнике для отработки новых методов управления, анализа состояния пространства перед роботом и над ним, измерения ускорения при движении, получения изображения с видеокамеры и его сохранения, получения трехмерного изображения робота в реальном масштабе времени при его движении по поверхности. Он может использоваться для диагностики трубопроводов, скрытых полостей, подземных коммуникаций при наличии неагрессивной среды.
Применение данного изобретения позволяет повысить эффективность управляемости мобильного робота.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ РОБОТИЗИРОВАННЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2014 |
|
RU2557085C1 |
| Автономный мобильный робототехнический комплекс | 2016 |
|
RU2632342C1 |
| Космический мобильный робот-инспектор | 2022 |
|
RU2783640C1 |
| ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ МОБИЛЬНЫЙ РОБОТ, ВИДЕОКАМЕРА МОБИЛЬНОГО РОБОТА, ЗВУКОПРИЕМНАЯ СИСТЕМА САМОНАВЕДЕНИЯ МОБИЛЬНОГО РОБОТА, СФЕРИЧЕСКАЯ ГРАНАТА | 2011 |
|
RU2473863C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| МОБИЛЬНЫЙ РОБОТ | 2014 |
|
RU2544434C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506157C1 |
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ WI-FI | 2023 |
|
RU2831101C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ БОЕВЫХ ДЕЙСТВИЙ | 2013 |
|
RU2533229C2 |
| САМОДВИЖУЩИЙСЯ УНИВЕРСАЛЬНЫЙ КОМПЛЕКС ОБСЛУЖИВАНИЯ ОБЪЕКТА | 2019 |
|
RU2732286C1 |
Изобретение относится к робототехнике. Робот содержит размещенные в корпусе устройства для перемещения робота блок обнаружения препятствия, блок определения текущего местоположения робота и блок наблюдения за пространством перед роботом, соединенные посредством информационных каналов с блоком управления, и источник питания. Блок наблюдения за пространством перед роботом подключен к видеокамере наблюдения. Робот имеет перемещающееся средство с размещенными на нем станцией мобильной связи, выполненной с возможностью доступа в ИНТЕРНЕТ, и пультом дистанционного управления в виде персонального компьютера, соединенного информационным каналом со станцией мобильной связи. Устройство для перемещения робота выполнено в виде самодвижущейся тележки, которая кинематически связана с перемещающимся средством. Блок обнаружения препятствия снабжен установленными на корпусе самодвижущейся тележки передатчиком и приемником ультразвукового сигнала. Источник питания соединен также с блоком определения пройденного роботом расстояния, блоком измерения ускорения при движении робота и со станцией мобильной связи и персональным компьютером. Изобретение позволит повысить эффективность функционирования и управляемости робота. 6 з.п. ф-лы, 2 ил.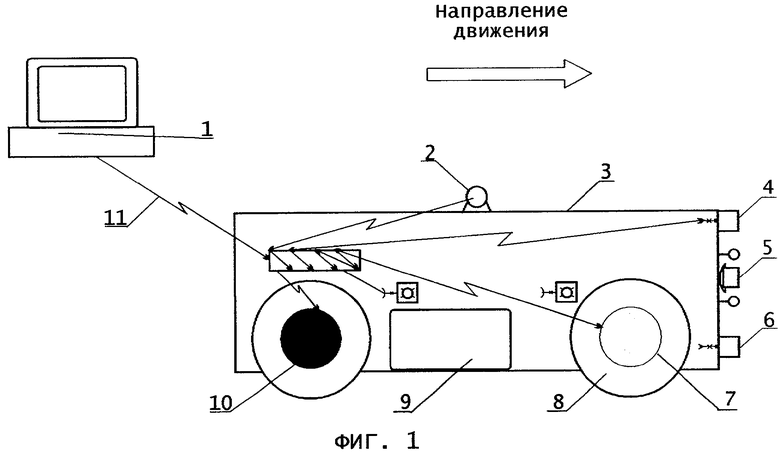
| СИСТЕМА С МОБИЛЬНЫМ РОБОТОМ, ВЫПОЛНЕННАЯ С ИСПОЛЬЗОВАНИЕМ ВЫСОКОЧАСТОТНОГО МОДУЛЯ | 2001 |
|
RU2210491C2 |
| МОБИЛЬНЫЙ РОБОТ И СПОСОБ КОРРЕКТИРОВКИ ЕГО КУРСА | 2001 |
|
RU2210492C2 |
| СИСТЕМА С ЧИСТЯЩИМ РОБОТОМ, ВЫПОЛНЕННАЯ С ИСПОЛЬЗОВАНИЕМ МОБИЛЬНОЙ СЕТИ СВЯЗИ | 2001 |
|
RU2212995C2 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |

