Изобретение относится к робототехнике, а именно к адаптивным мобильным пространственным робототехническим системам, и может быть использовано для эксплуатации в наземной, подземной, подводной, авиационно-космический технике и приборостроении.
Известно устройство пространственного манипулятора, выполненного в виде неподвижного основания (корпуса) и подвижной жесткой механической руки, имеющей шесть степеней свободы относительно основания и выполненной в виде крестовины со схватом, смонтированным на одном из ее плеч (В.Н.Данилевский. Манипулятор. // Авторское свидетельство СССР №558788, МКИ В25J 1/02). Остальные три плеча крестовины шарнирно связаны шестью стержнями с основанием. При этом шесть стержней образуют замкнутую кинематическую цепь, а каждый из них снабжен приводом линейного перемещения.
Известно устройство пространственного манипулятора, содержащего жесткое неподвижное основание (базу) и жесткое выходное звено, соединенные между собой шестью тягами через сферические или эквивалентные им шарниры. Длина каждой тяги регулируется приводом осевого перемещения по командам программы, управляющей движением выходного звена, имеющего шесть степеней подвижности. На выходном звене может быть установлено захватное устройство (Манипуляционные системы роботов. / А.И.Корендясев, Б.Л.Саламандра, Л.И.Тывес и др.; Под общ. ред. А.И.Корендясева. - М.: Машиностроение, 1989. С.308-309, рис.9.6). Данные пространственные манипуляторы могут выполняться в виде однотипных модулей, которые после соединения способны образовывать пространственные манипуляторы с большим числом степеней подвижности (Там же, рис.9.10, с.310-311).
Известно устройство адаптивной пространственной форменной конструкции с изменяемой геометрией, представляющее собой два октаэдра с одной общей гранью (Формостабильные и интеллектуальные конструкции из композиционных материалов. / Г.А.Молодцов, В.Е.Биткин, В.Ф.Симонов, Ф.Ф.Урманов. - М.: Машиностроение, 2000. - 352 с.: ил., с.214-220, рис.8.12 - прототип устройства). Все ребра данной конструкции выполнены в виде жестких и активных стержней, шарнирно связанных между собой. Данная конструкция включает три активные параллельные грани, все ребра которых выполнены в виде активных стержней, способных по управляющим командам изменять свою длину и двенадцать полуактивных граней, включающих по два жестких и одному активному стержню. При этом активные и полуактивные смежные грани имеют общие ребра в виде активных стержней.
Известен способ измерения пространственного перемещения тел, связанных с неподвижным основанием шестью стержнями с однокоординатными измерительными преобразователями линейных перемещений, относительно неподвижного основания (базы), в котором осуществляется измерение текущих параметров положения подвижного тела путем измерения длин стержней (Д.М.Дайч, А.Ш.Колискор, В.И.Сергеев. Устройство для измерения пространственного перемещения тел. // Авторское свидетельство СССР №1040318, МКИ G01В 5/00 - прототип способа).
Указанные устройства и способ имеют следующие недостатки:
- отсутствует возможность организации их мобильности (самоперемещения) и адаптации к поверхностям перемещения и перемещаемого объекта (предмета), в частности к протяженной замкнутой внутренней поверхности тоннельного (или скважинного) типа, а также к наружной поверхности колонного типа, которые могут иметь переменные по длине поперечные сечения и искривленную траекторию движения;
- отсутствует возможность самоперемещения внутри труб по отводу колена или тройника, расположенного под прямым углом без радиусного перехода;
- отсутствует возможность организации перемещения внутри замкнутых поверхностей протяженных (длинномерных) предметов, например кабелей, труб и т.п.;
- отсутствует возможность соединения однотипных модулей с образованием общих граней через все их грани и организации перемещения предметов внутри замкнутых поверхностей с одновременным их пространственным позиционированием и виброзащитой;
- отсутствие возможности контроля физико-механических свойств (например, при проведении каротажа скважин, имеющих отклонение от вертикальной оси), геометрической формы контактируемых поверхностей и траектории движения как в прозрачной окружающей среде, так и непрозрачной для оптических, радио, ультразвуковых и других физических методов контроля, а также ограниченная пространственная манипуляция активных внешних граней;
- отсутствует возможность схватывать (зажимать) предметы произвольной формы, например обрабатывающие инструменты, и совершать ими полнооборотные вращательные движения, а также генерировать и контролировать вибрационные и ударные воздействия при их взаимодействии с контактируемыми поверхностями;
- отсутствует возможность ударно-вибрационного воздействия долбежными инструментами с изменением их последовательности;
- отсутствует возможность функциональной замены фронтальной и тыльной граней на другую эквивалентную им пару в процессе эксплуатации манипулятора.
Техническим результатом предлагаемого адаптивного мобильного пространственного робота-манипулятора Саяпина-Синева является расширение функциональных возможностей и повышение надежности за счет:
- организации возможности его мобильности (самоперемещения) и адаптации к поверхностям перемещения и перемещаемого объекта (предмета), в частности к протяженной замкнутой внутренней поверхности тоннельного (или скважинного) типа, а также к наружной поверхности колонного типа, которые могут иметь переменные по длине поперечные сечения и искривленную траекторию движения;
- организации возможности самоперемещения внутри труб по отводу колена или тройника, расположенного под прямым углом без радиусного перехода;
- организации возможности перемещения внутри замкнутых поверхностей протяженных (длинномерных) предметов, например кабелей, труб и т.п.;
- организации возможности соединения однотипных модулей с образованием общих граней через все их грани и перемещения предметов внутри замкнутых поверхностей с одновременным их пространственным позиционированием и виброзащитой;
- организации возможности контроля физико-механических свойств (например, при проведении каротажа скважин, имеющих отклонение от вертикальной оси), геометрической формы контактируемых поверхностей и траектории движения как в прозрачной окружающей среде, так и непрозрачной для оптических, радио, ультразвуковых и других физических методов контроля;
- организации возможности схватывать (зажимать) предметы произвольной формы, например обрабатывающие инструменты, и совершать ими полнооборотные вращательные движения, а также генерировать и контролировать вибрационные и ударные воздействия при их взаимодействии с контактируемыми поверхностями;
- организации возможности ударно-вибрационного воздействия долбежными инструментами с изменением их последовательности;
- организации возможности функциональной замены фронтальной и тыльной граней на другую эквивалентную им пару в процессе эксплуатации манипулятора.
Это достигается тем, что в адаптивном мобильном пространственном роботе-манипуляторе Саяпина-Синева, содержащем пространственную структуру в виде октаэдрного модуля в исходном положении, при этом ребра октаэдрного модуля выполнены в виде стержней, концы которых шарнирно связаны в его вершинах, при этом стержни двух параллельных граней октаэдрного модуля, выполненные с возможностью соединения через них с подобными модулями с образованием общих граней, снабжены линейными приводами с датчиками относительного перемещения с возможностью изменения их длины по управляющим командам от системы управления, согласно изобретению все грани октаэдрного модуля выполнены с возможностью соединения через них с подобными модулями и все стержни октаэдрного модуля снабжены линейными приводами с шарнирными соединениями на концах, выполненных в виде сферических шарниров или эквивалентных им соединений, при этом вершины октаэдрного модуля и срединные участки стержней тыльной грани, расположенной с противоположной стороны от направления движения и параллельной ей фронтальной грани, расположенной со стороны направления движения, снабжены радиальными упорами с датчиками температуры и изолированными друг от друга электрическими контактами с возможностью образования адаптивных схватов и фиксирующих опор робота-манипулятора Саяпина-Синева, при этом каждый из стержней снабжен датчиками относительного перемещения и относительной скорости, упоры - датчиками силы, а вершины октаэдра - совмещенными датчиками пространственного положения и ускорений, представляющих миниатюрные трехосные блоки гироскопов-акселерометров, при этом линейные приводы, датчики силы, температуры, относительного перемещения и относительной скорости и совмещенные датчики пространственного положения и ускорений электрически связаны через аналого-цифровые преобразователи с системой управления с возможностью оперативного контроля и управления в реальном режиме времени. Причем линейные приводы могут быть выполнены с увеличенным рабочим ходом, например телескопическими, шарнирные соединения на концах стержней могут быть выполнены в виде упругих шарниров из сверхупругого материала, а миниатюрные трехосные блоки гироскопов-акселерометров датчиков пространственного положения и ускорений могут быть выполнены в виде микромеханических вибрационных гироскопов-акселерометров.
Это достигается тем, что в способе организации движений и контроля физико-механических свойств и геометрической формы контактируемой поверхности и траектории движения с помощью адаптивного мобильного пространственного робота-манипулятора Саяпина-Синева, выполненного в виде октаэдрного модуля, включающего управление пространственным перемещением его вершин путем контроля длин всех стержней и определения пространственных координат вершин относительно базовой системы координат с помощью датчиков относительного перемещения и системы управления и формирование управляющих команд для линейных приводов стержней, управление мобильным роботом-манипулятором осуществляют по показаниям датчиков силы, температуры, пространственного положения, относительного перемещения и трехосных блоков акселерометров - при его перемещении и по показаниям датчиков силы, трехосных блоков акселерометров, датчиков относительной скорости, относительного перемещения - при организации ударных и вибрационных воздействий, при этом управление мобильным пространственным роботом-манипулятором Саяпина-Синева осуществляют по одному из следующих режимов или их комбинаций:
- при его продольном или винтовом самоперемещении по внутренней замкнутой поверхности трубчатого, тоннельного, скважинного или другого типа осуществляют попеременное перемещение относительно друг друга двух параллельных граней, при этом в начальный момент времени увеличивают длины стержней противоположных граней, которые располагают поперек направления предполагаемого движения, до момента установления контакта радиальных упоров их вершин с внутренней поверхностью и фиксируют с заданным усилием, которое определяют по показаниям датчиков силы, после этого линейные приводы отключают и вычисляют координаты вершин граней относительно базовой системы координат, затем уменьшают длины стержней тыльной грани и после расфиксации ее вершин с контактируемой поверхностью линейные приводы стержней тыльной грани останавливают и согласованно уменьшают длины стержней боковых граней, линейные приводы которых останавливают после уменьшения длин стержней до заданных значений, затем увеличивают длины стержней тыльной грани до установления контакта радиальных упоров ее вершин с внутренней поверхностью и фиксируют с заданным усилием, которое определяют по показаниям датчиков силы, после этого производят уменьшение длин стержней фронтальной грани и после расфиксации ее вершин с контактируемой поверхностью линейные приводы стержней грани останавливают и согласованно увеличивают длины стержней боковых граней, линейные приводы которых останавливают после увеличения длин стержней до заданных значений, затем увеличивают длины стержней фронтальной грани до установления контакта радиальных упоров ее вершин с внутренней поверхностью и фиксируют с заданным усилием, которое определяют по показаниям датчиков силы, затем алгоритм движения повторяют, при этом траекторию перемещения вершин граней по внутренней поверхности выбирают прямолинейной, винтовой или комбинированной, при этом запоминают пространственные координаты вершин граней относительно базовой системы координат и время моментов их фиксации с контактируемой поверхностью и по их значениям судят о траектории движения и скорости перемещения адаптивного мобильного пространственного робота-манипулятора Саяпина-Синева;
- при его продольном или винтовом самоперемещении по наружной поверхности колонного, арочного или другого типа, перед перемещением производят расстыковку шарнирных узлов до размыкания стержней тыльной, фронтальной и одной из боковых граней, осуществляют охват стержнями тыльной и фронтальной гранями наружной контактируемой поверхности и восстанавливают их шарнирные соединения, затем осуществляют попеременное перемещение относительно друг друга тыльной и фронтальной граней, при этом в начальный момент времени уменьшают длины их стержней до момента установления контакта радиальных упоров срединных участков стержней тыльной и фронтальной граней с наружной поверхностью и фиксируют с заданным усилием, которое определяют по показаниям датчиков силы, после этого линейные приводы отключают и вычисляют координаты всех точек контакта относительно базовой системы координат, затем увеличивают длины стержней фронтальной грани и после расфиксации радиальных упоров срединных участков стержней с наружной контактируемой поверхностью линейные приводы стержней фронтальной грани останавливают и согласованно увеличивают длины стержней боковых граней, линейные приводы которых останавливают после увеличения длин стержней до заданных значений, затем уменьшают длины стержней фронтальной грани до установления контакта радиальных упоров срединных участков стержней с наружной поверхностью и фиксируют с заданным усилием, которое определяют по показаниям датчиков силы, после этого производят увеличение длин стержней фронтальной грани и после расфиксации радиальных упоров срединных участков стержней с наружной контактируемой поверхностью линейные приводы стержней тыльной грани останавливают и согласованно уменьшают длины стержней боковых граней, линейные приводы которых останавливают после уменьшения длин стержней до заданных значений, затем уменьшают длины стержней тыльной грани до установления контакта радиальных упоров срединных участков стержней с наружной контактируемой поверхностью и фиксируют с заданным усилием, которое определяют по показаниям датчиков силы, затем алгоритм движения повторяют, при этом траекторию перемещения точек контакта радиальных упоров срединных участков стержней по наружной поверхности выбирают прямолинейной, винтовой или комбинированной, при этом запоминают пространственные координаты точек контакта радиальных упоров срединных участков стержней тыльной и фронтальной граней относительно базовой системы координат и время моментов их фиксации с контактируемой поверхностью и по их значениям судят о траектории движения и скорости перемещения адаптивного мобильного пространственного робота-манипулятора Саяпина-Синева по наружной поверхности;
- при его самоперемещении внутри колена или тройника трубчатого профиля, перед отводом колена или тройника октаэдрный модуль трансформируют в положение, при котором вершины одного из трех общих оснований четырехгранных пирамид устанавливают враспор внутри трубчатого профиля таким образом, чтобы оси симметрии соответствующей пары параллельных граней октаэдрного модуля совпали с продольной осью отвода колена или тройника, и после этого осуществляют самоперемещение по отводу аналогично продольному или винтовому самоперемещению по внутренней замкнутой поверхности;
- при перемещении с его помощью протяженных охватываемых предметов округлой формы внутри замкнутой поверхности адаптивный мобильный пространственный робот-манипулятор Саяпина-Синева размещают во внутренней замкнутой поверхности и фиксируют фронтальную грань, затем конец перемещаемого предмета устанавливают внутри тыльной грани и уменьшают длины ее стержней, после фиксации перемещаемого предмета согласованно уменьшают длины стержней боковых граней, при этом тыльную грань перемещают вместе с предметом внутри замкнутой поверхности на фиксированную длину, которую запоминают относительно базовой системы координат, затем длины стержней тыльной грани увеличивают до полной расфиксации радиальных упоров их срединных участков с перемещаемым предметом и увеличивают длины стержней боковых граней до исходного положения, затем операцию с перемещением предмета повторяют в необходимом количестве, а по окончании процесса определяют суммарную длину перемещения;
- при организации с его помощью перемещения предметов с одновременным их пространственным позиционированием и виброзащитой октаэдрные модули объединяют с образованием общей грани, при этом с помощью одного из них осуществляют перемещение по внутренней замкнутой поверхности, а с помощью смежного модуля осуществляют захват предмета, его позиционирование и виброзащиту в процессе перемещения, при этом пространственное положение и величины ударно-вибрационных воздействий от самоперемещающегося модуля к перемещаемому предмету контролируют с помощью датчиков силы и пространственного положения и ускорений, установленных в радиальных опорах тыльной грани, а также датчиков относительных перемещений и скорости, установленных в стержнях боковых граней;
- при осуществлении контроля геометрической формы внутренней и наружной контактируемых поверхностей в процессе перемещения адаптивного пространственного робота-манипулятора Саяпина-Синева перед каждым продольным перемещением тыльной и фронтальной граней осуществляют их дискретные повороты с заданным шагом относительно направления перемещения и для каждого дискретного положения устанавливают механический контакт радиальных упоров вершин граней с внутренней контактируемой поверхностью или радиальных упоров срединных участков тыльной и фронтальной граней соответственно с наружной контактируемой поверхностью, определяют их пространственные координаты относительно базовой системы координат и по их значениям судят о геометрической форме внутренней или наружной контактируемых поверхностей;
- при осуществлении с его помощью контроля физико-механических свойств материала контактируемой поверхности радиальные упоры вершин граней доводят до механического контакта с поверхностью с заданным усилием, определяют их пространственное положение относительно базовой системы координат, увеличивают усилие прижима радиальных упоров вершин граней до заданного значения и определяют их пространственное положение относительно базовой системы координат, затем процедуру повторяют с первоначальным усилием и по различиям в значениях пространственных координат радиальных упоров судят об упруго-пластических свойствах материала контактируемой поверхности, при этом при заданных усилиях прижима электрических контактов радиальных упоров производят измерение в них значений температуры и электрического сопротивления между ними и по ним судят о физических свойствах материала контактируемой поверхности, при этом периодически ускоренным движением линейных приводов стержней граней организуют ударные и вибрационные воздействия радиальными упорами вершин граней на контактируемую поверхность и по показаниям акселерометров осуществляют вибрационную диагностику контролируемого объекта, включая определение наличия в контактируемой поверхности механических дефектов;
- при организации с его помощью вращения обрабатывающего инструмента хвостовик инструмента выполняют в виде коленвала с вращающейся втулкой на конце, которую зажимают радиальными упорами срединных участков стержней фронтальной грани, а радиальные упоры тыльной граны фиксируют с контактируемой внутренней поверхностью, затем согласованным изменением длин стержней боковых граней подводят режущую часть инструмента в точку обработки, выставляют в пространстве ось вращения инструмента и обеспечивают требуемое усилие резания, затем согласованным изменением длин стержней боковых граней осуществляют перемещение оси вращения зажатой подвижной втулки по окружности, перпендикулярной оси вращения инструмента и имеющей радиус, равный радиусу коленвала, при этом в процессе вращения инструмента согласованным увеличением стержней боковых граней организуют его продольную подачу с заданным усилием и с возможностью генерирования ударно вибрационных воздействий в комбинации с вращением инструмента, при этом пространственное положение, усилие резания и величину ударно-вибрационных воздействий обрабатываемого инструмента контролируют с помощью датчиков силы и пространственного положения и ускорений, установленных в радиальных опорах фронтальной грани, а также датчиков относительных перемещений и скорости, установленных в стержнях боковых граней;
- при организации с его помощью ударно-вибрационного воздействия долбежным инструментом на торцевую поверхность трубчатого профиля долбежный инструмент устанавливают в каждой из вершин фронтальной грани, а упоры тыльной грани фиксируют с контактируемой внутренней поверхностью, затем согласованным изменением длин стержней боковых граней подводят рабочие части долбежных инструментов до контакта с торцевой поверхностью в место обработки и начинают обработку с заданной частотой и амплитудой и усилием, при этом изменением длин стержней боковых граней в процессе обработки обеспечивают возможность одиночного, попарного и тройного воздействий долбежных инструментов в месте обработки, причем для одиночного и попарного воздействия обеспечивают при необходимости изменения последовательности их воздействий, при этом пространственное положение, усилие резания и величину ударно-вибрационных воздействий долбежного инструмента контролируют с помощью датчиков силы и пространственного положения и ускорений, установленных в радиальных опорах фронтальной грани, а также датчиков относительных перемещений и скорости, установленных в стержнях боковых граней.
На фиг.1 представлено схематическое изображение октаэдрного модуля адаптивного мобильного пространственного робота-манипулятора Саяпина-Синева.
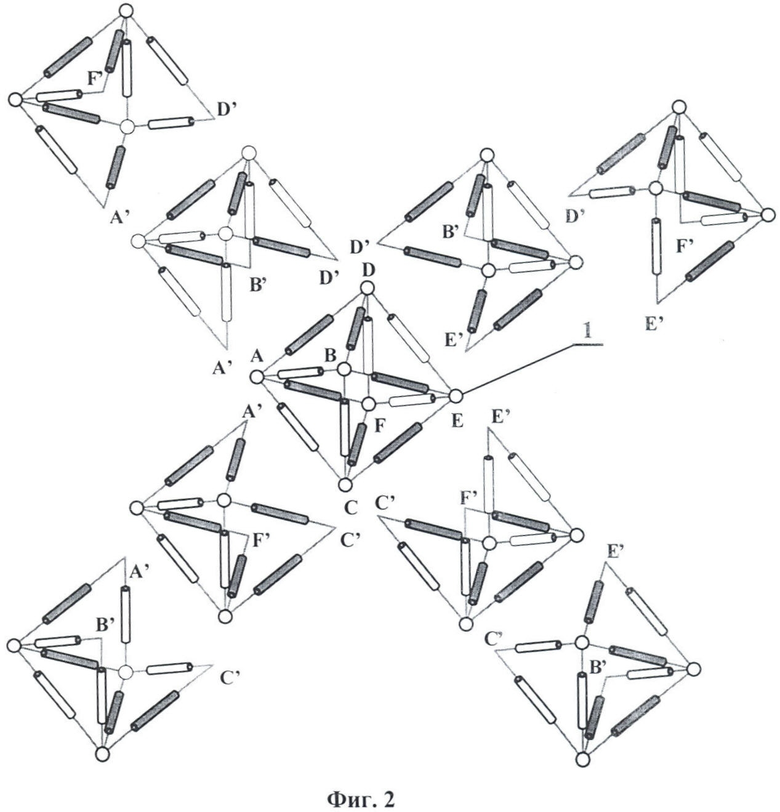
На фиг.2 показана возможность наращивания каждой из граней октаэдрного модуля однотипными модулями.
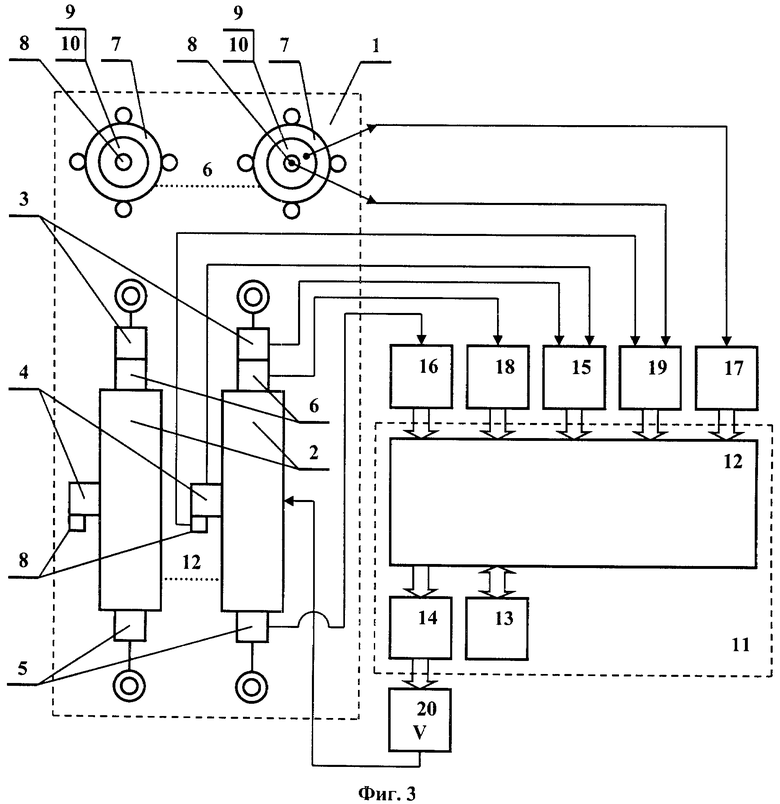
На фиг.3 представлена структурная схема адаптивного мобильного пространственного робота-манипулятора Саяпина-Синева.
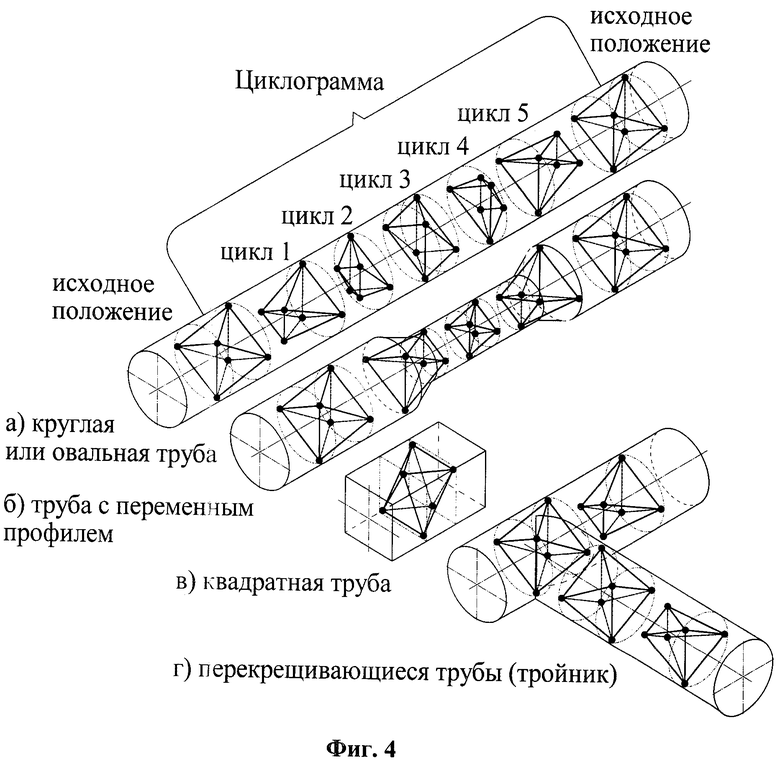
На фиг.4 изображены размещение модуля внутри труб различного профиля и циклограмма его самоперемещения.
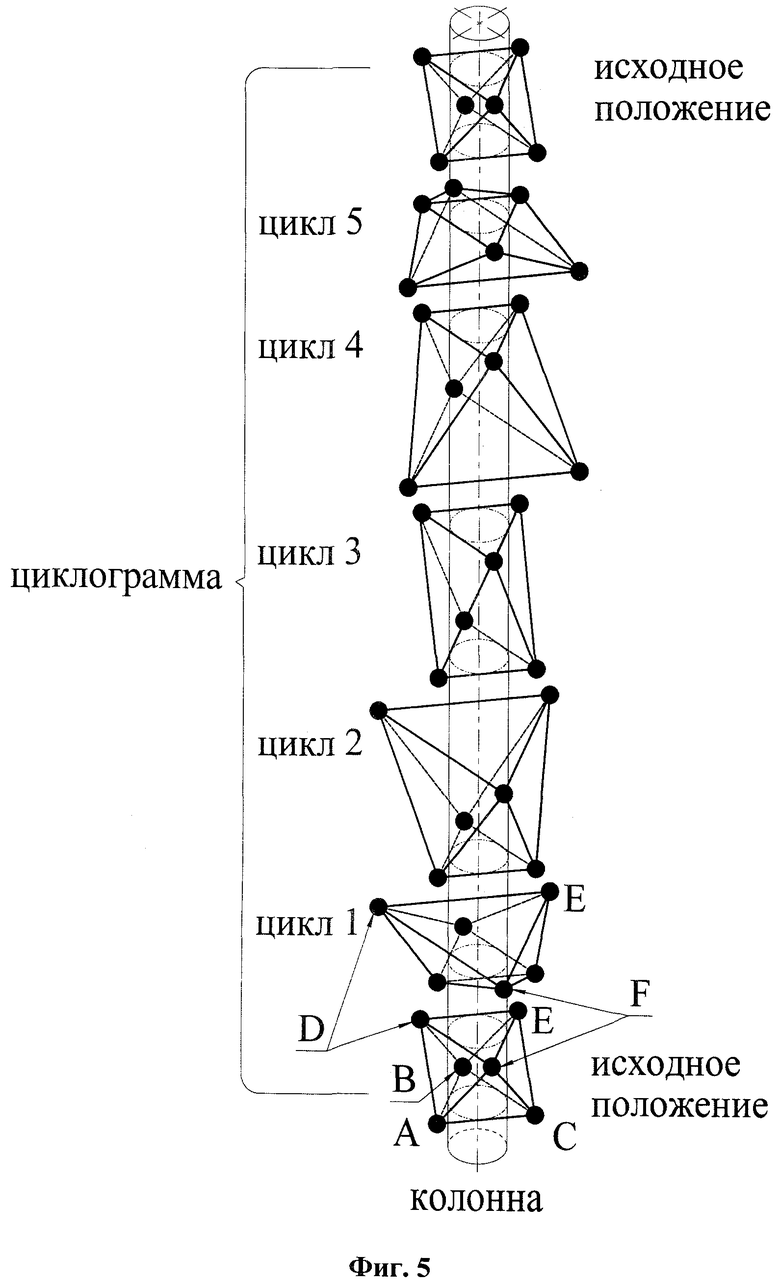
На фиг.5 изображены установка модуля снаружи стержня и циклограмма его самоперемещения.
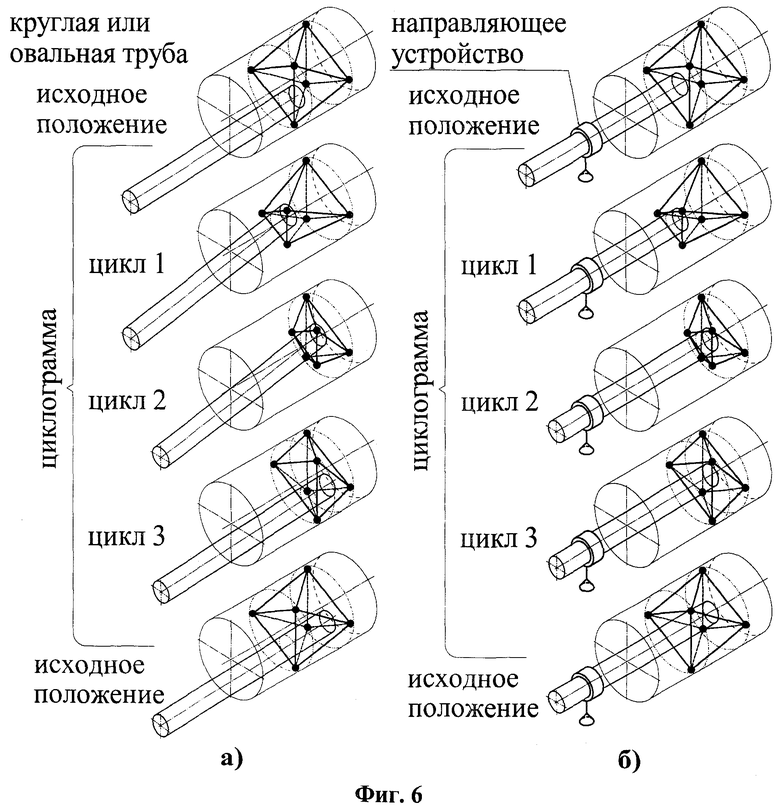
На фиг.6 представлена циклограмма вариантов перемещения с помощью модуля протяженного предмета внутри замкнутой поверхности без направляющего устройства (а) и с направляющим устройством (б).
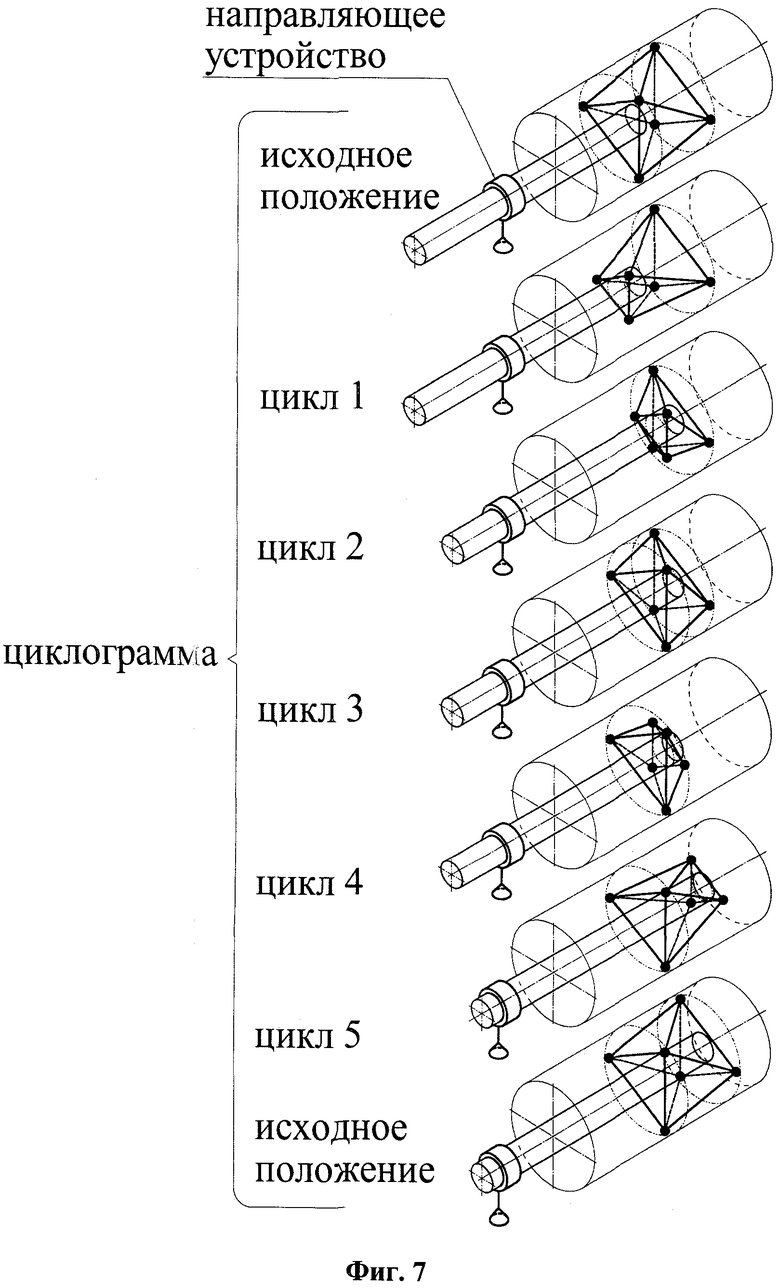
На фиг.7 представлена циклограмма перемещения с помощью модуля протяженного предмета внутри замкнутой поверхности с направляющим устройством с одновременным самоперемещением модуля.
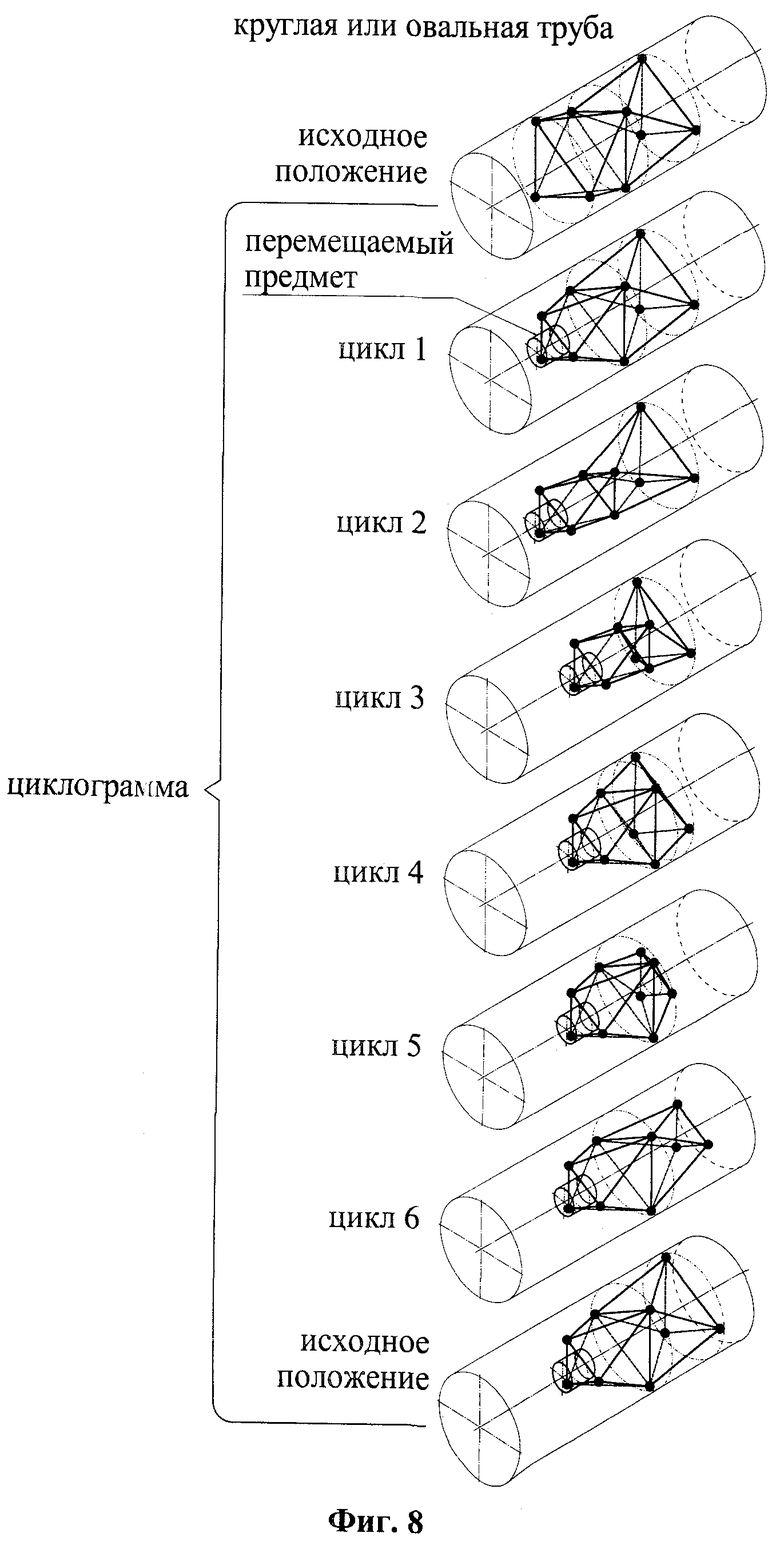
На фиг.8 представлена циклограмма самоперемещения спаренного октаэдрного модуля внутри замкнутой поверхности с одновременным позиционированием и виброзащитой перемещаемого предмета.
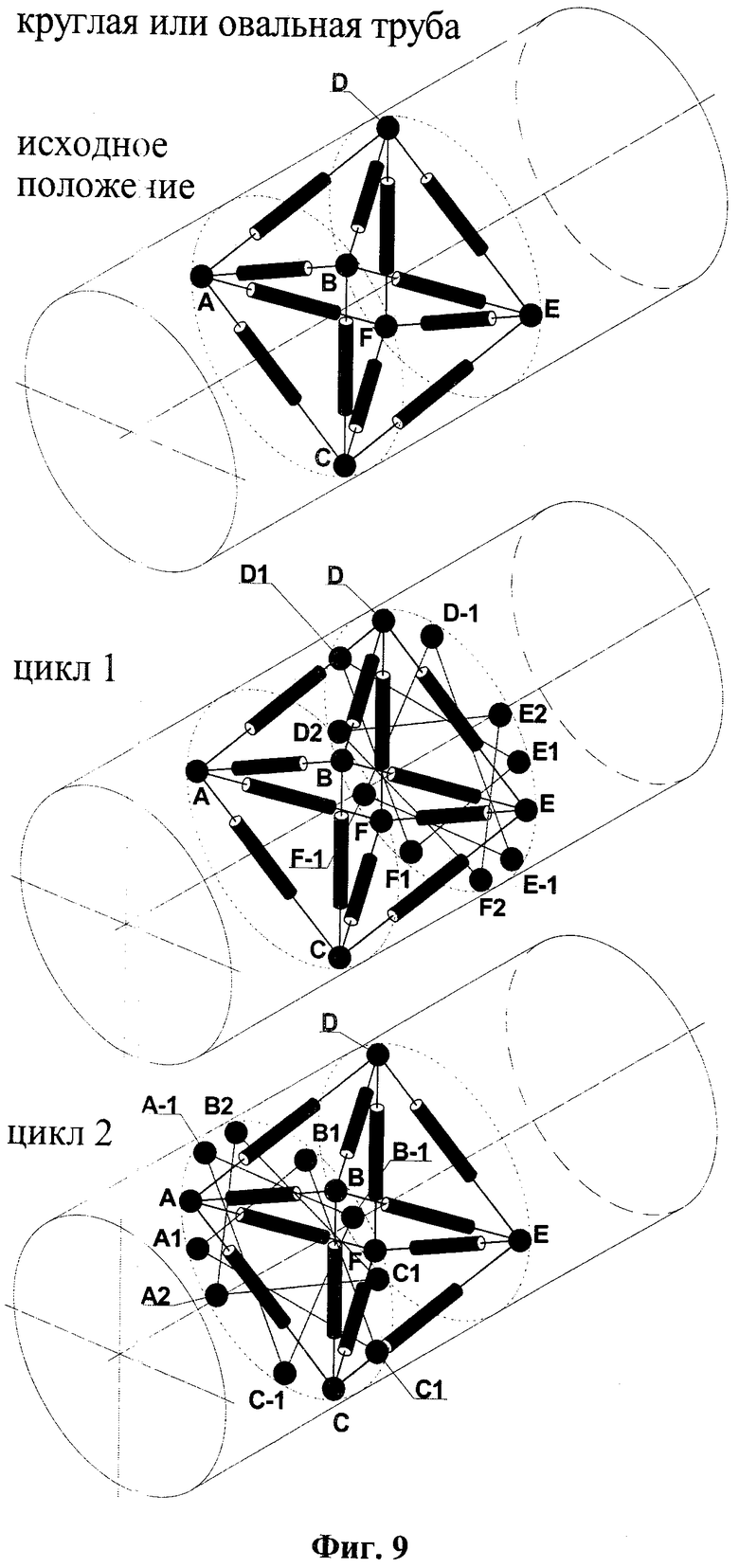
На фиг.9 показана возможность контроля геометрической формы внутренней замкнутой поверхности с помощью модуля.
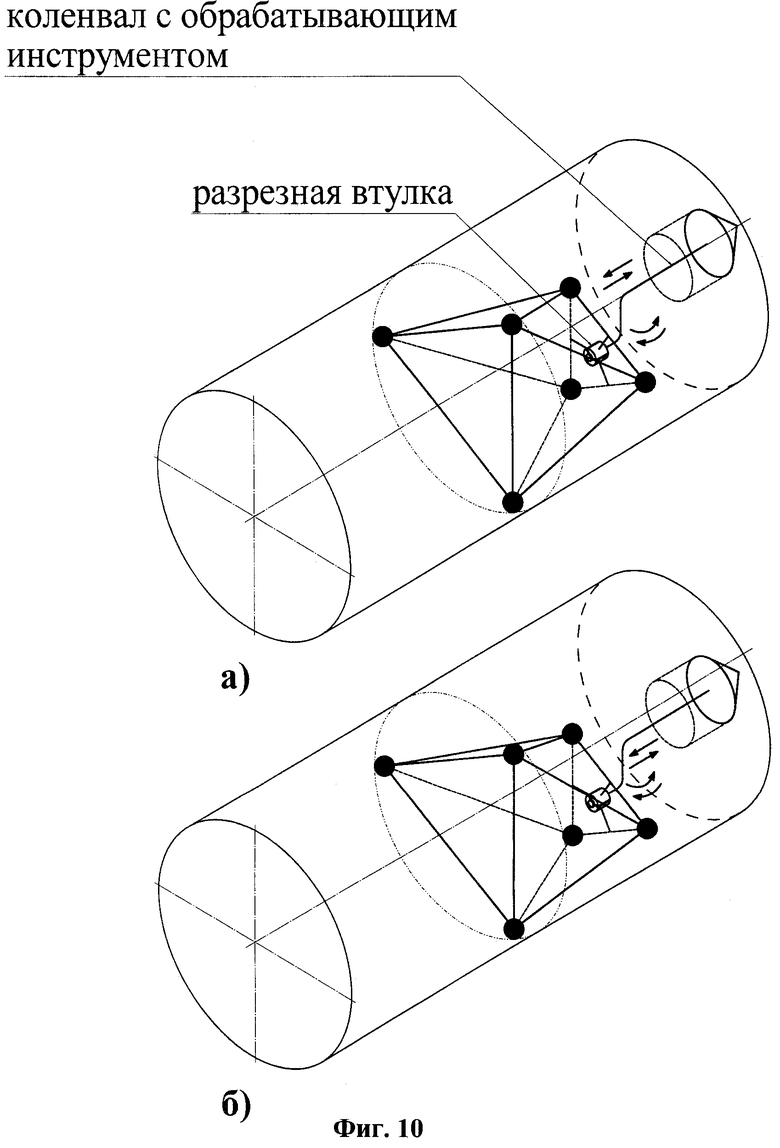
На фиг.10 показана возможность организации с помощью модуля вращения обрабатывающего инструмента соосно с осью симметрии модуля (а) и эксцентрично (б).
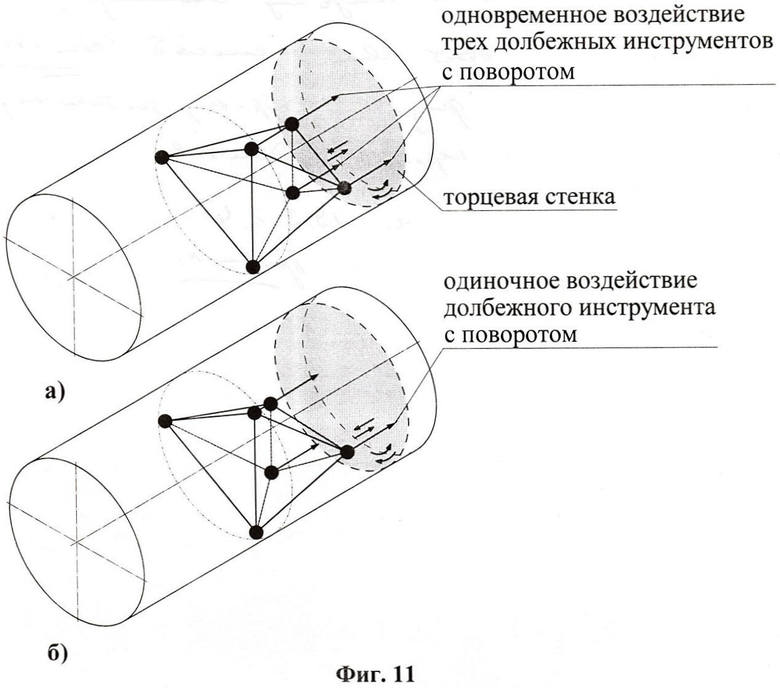
На фиг.11 показана возможность организации с помощью модуля одновременного ударно-вибрационного воздействия на торцевую стенку долбежными инструментами (а) и одиночного (б).
Адаптивный мобильный пространственный робот-манипулятор Саяпина-Синева выполнен в виде октаэдрного модуля 1, каждое из двенадцати ребер которого выполнено в виде линейного привода 2 с осевым 3 и срединным 4 датчиками силы и датчиком относительного линейного перемещения 5 и относительной скорости 6. Концы линейных приводов 2 соединены с помощью сферических или эквивалентных им шарниров в шести вершинах 7 октаэдрного модуля 1 по четыре в каждой. Вершины 7 и срединные участки ребер тыльной грани, расположенной с противоположной стороны от направления движения и параллельной ей фронтальной грани, расположенной со стороны направления движения, снабжены соответственно радиальными упорами и схватами с датчиками температуры 8 и изолированными друг от друга электрическими контактами (условно не показаны). При этом фронтальной и тыльной гранями могут быть любые противоположные грани октаэдрного модуля 1. При необходимости радиальными упорами и схватами могут быть снабжены вершины и ребра всех граней октаэдрного модуля 1. Октаэдрный модуль 1 представляет собой пространственный механизм параллельной кинематики с возможностью образования пространственной фермы при отключенных исполнительных органах в виде линейных приводов 2. В каждой из вершин 7, представляющей собой шарнирный узел, установлены соответственно совмещенные датчики пространственного положения и ускорений 9 и 10. При этом датчики 9 и 10 могут быть выполнены в виде миниатюрных трехосных блоков гироскопов-акселерометров, позволяющих определять относительные положения вершин 7 и измерять составляющие ускорений, действующих на продольные оси ребер октаэдрного модуля 1. Система управления (СУ) 11 включает нейрокомпьютер 12, программно-алгоритмическое обеспечение 13 и цифроаналоговые преобразователи (ЦАП) 14. Входы СУ 11 через шины данных аналого-цифровых преобразователей (АЦП) подключены соответственно к выходам АЦП 15 датчиков силы 3 и 4, АЦП 16 датчиков относительного линейного перемещения 5, АЦП 17 совмещенных датчиков пространственного положения и ускорений 9 и 10; АЦП 18 датчиков относительной скорости 6; АЦП 19 датчиков температуры 8, а выходы СУ 9 через шины выходных данных подключены к соответствующим входам программно-алгоритмического обеспечения 13 и последовательно соединенных цифроаналоговых преобразователей (ЦАП) 14, усилителей мощности 20 и исполнительных органов (линейных приводов 2). При этом СУ 11 и система энергопитания (условно не показана) могут быть выполнены как автономного, так и дистанционного исполнения.
Адаптивный мобильный пространственный робот-манипулятор Саяпина-Синева, выполненный в виде октаэдрного модуля 1 (в исходном положении), работает следующим образом.
Октаэдрный модуль 1 является базовым элементом при построении многомодульных пространственных робототехнических систем. Для этого все грани октаэдрного модуля 1 выполнены с возможностью соединения через них с подобными модулями с образованием общих граней (фиг.2). При этом у присоединяемых октаэдрных модулей отсоединены стыкуемые грани (ΔA'B'C'; ΔA'C'F'; ΔA'D'F'; ΔA'B'D'; ΔD'E'F'; ΔD'B'E'; ΔB'C'E'; ΔC'E'F') в зависимости от направления наращивания. Каждая из отсоединенных граней представляет собой треугольник, образованный из шарнирно связанных в вершинах 7 стержней с линейными приводами 2.
Каждая пара параллельных граней октаэдрного модуля 1 может использоваться в качестве тыльной (дальней от направления движения и фронтальной (ближней к направлению движения) граней, например ΔАВС и ΔDEF. При этом ось, проходящая через центры этих граней, совпадает с направлением движения октаэдрного модуля 1.
Вершины октаэдрного модуля 1 и срединные участки стержней с линейными приводами 2 тыльной и фронтальной граней снабжены радиальными упорами (на чертеже условно не показаны), взаимодействующими с внутренними и наружными контактируемыми поверхностями и служат соответственно для передачи распорных и сжимающих усилий от вершин и срединных участков стержней к внутренней и наружной поверхностям соответственно. Оперативный контроль передаваемых усилий в местах контакта упоров вершин 7 и срединных участков с линейными приводами 2 с внутренней и наружной поверхностями соответственно осуществляют с помощью датчиков силы 3 и 4. В местах контакта радиальных упоров вершин 7 и срединных участков стержней с линейными приводами 2 с внутренней и наружной поверхностями установлены также датчики температуры 8, позволяющие осуществлять контроль температуры поверхностей в соответствующих точках. В местах контакта радиальных упоров вершин 7 установлены также изолированные друг от друга электрические контакты (условно не показаны), позволяющие измерять разность потенциалов между точками контакта внутренней поверхности.
В непосредственной близости от радиальных упоров вершин 7 установлены совмещенные датчики пространственного положения 9 и ускорений 10, которые служат для оперативного контроля пространственного положения каждой из вершин 7 и виброускорений вдоль каждой из осей стержней с линейными приводами 2. Датчики относительного линейного перемещения 5 и относительной скорости 6 (наблюдатели состояний) линейных приводов 2 регистрируют их относительные перемещения и скорости.
Октаэдрный модуль 1 устанавливают внутри или снаружи замкнутой протяженной поверхности и осуществляют необходимые перемещения в зависимости от поставленных задач. При этом с помощью линейных приводов 2 и системы управления 11 осуществляют согласованные изменения длин ребер октаэдрного модуля. В результате происходят заданные пространственные перемещения вершин 7 относительно базовой системы координат. Управление исполнительными органами октаэдрного модуля 1 (линейными приводами 2) осуществляется по управляющим командам от системы управления 11, которые формируются по показаниям датчиков силы 3, 4 относительного перемещения 5 и относительной скорости 6, совмещенных датчиков пространственного положения и ускорений 9, 10. При этом сигналы от датчиков поступают на входы АЦП 15, 16, 18 и 17 соответственно и через шину данных в нейрокомпьютер 12 системы управления 11. После обработки в реальном масштабе времени данных с использованием соответствующего программно-алгоритмического обеспечения 13 формируют управляющие команды, которые через ЦАП 14 и усилители мощности 20 поступают на исполнительные органы (линейные приводы 2) и октаэдрный модуль 1 изменяет свою геометрическую форму (трансформируется).
Способ организации движений и контроля физико-механических свойств и геометрической формы контактируемой поверхности и траектории движения с помощью адаптивного мобильного пространственного робота-манипулятора Саяпина-Синева реализуется следующим образом. Управление адаптивным мобильным пространственным роботом-манипулятором Саяпина-Синева осуществляется согласованным изменением длин стержней, обеспечивающих необходимое перемещение в пространстве вершин 7 октаэдрного модуля 1. При этом по показаниям датчиков относительного перемещения 5 линейных приводов 2, выполненных, например, в виде линейных позиционеров, осуществляют контроль длин всех стержней октаэдрного модуля. По показаниям датчиков пространственного положения 9, выполненных, например, в виде миниатюрных трехосных блоков гироскопов-акселерометров, судят о пространственных угловых перемещениях вершин 7. Геометрическая неизменяемость октаэдрного модуля 1 позволяет определять пространственные координаты вершин 7 по измеренным длинам всех стержней и управлять их перемещениями аналогично организации пространственных перемещений l-координатного манипулятора (Колискор А.Ш. Разработка и исследование промышленных роботов на основе l-координат. // Станки и инструмент, 1982. №12. С.21-24). А показания датчиков пространственного положения 9 позволяют повысить точность данных измерений с учетом погрешностей, вызванных тем, что в каждой из вершин 7 шарнирно соединяются концы четырех стержней при помощи сферических или эквивалентных им шарниров, которые конструктивно не могут иметь общего центра вращения.
В каждом из приведенных выше режимов способ реализуется следующим образом.
1-й режим - продольное или винтовое самоперемещение октаэдрного модуля 1 по внутренней замкнутой поверхности трубчатого, тоннельного, скважинного или другого типа (фиг.4). Данный режим осуществляется попеременным перемещением относительно друг друга и относительно замкнутой поверхности двух параллельных граней, принимаемых за тыльную и фронтальную (например, ΔАВС и ΔDEF соответственно, фиг.1, 2). При этом предварительно линейные приводы 2 стержней АВ, ВС, СА, DE, EF и FD включают на обратный ход и после уменьшения их длин до заданных величин, определяемых по показаниям датчиков относительного линейного перемещения 5, отключают. Уменьшенный таким образом в поперечном сечении октаэдрный модуль 1 устанавливают внутри замкнутой поверхности, которая может иметь различные геометрические формы (фиг.4), например круглую или овальную (фиг.4, а), квадратную или прямоугольную (фиг.4, в), а также переменный профиль по длине (фиг.4, б). При этом плоскости граней АВС и DEF располагают перпендикулярно направлению движения. Затем по команде от СУ 11 включаются линейные приводы 2 тыльной и фронтальной граней (ΔАВС и ΔDEF) на прямой ход и производят увеличение длин их стержней до момента установления контакта радиальных упоров (не показаны) их вершин 7 с внутренней поверхностью и после достижения заданного усилия, определяемого по показаниям датчиков силы 3, происходит распорная фиксация тыльной и фронтальной граней с внутренней замкнутой поверхностью, отключаются линейные приводы 2 этих граней и вычисляются пространственные координаты вершин 7 граней относительно базовой системы координат (Фиг.4, а, исходное положение), затем по команде от СУ 11 включаются линейные приводы 2 тыльной грани (ΔАВС) на обратный ход и уменьшаются длины ее стержней до момента расфиксации ее вершин 7 с контактируемой поверхностью, который определяется по показаниям датчиков силы 3, относительного линейного перемещения 5 и пространственного положения 9. После этого по команде от СУ 11 производится остановка линейных приводов 2 стержней тыльной грани (фиг.4, а, цикл 1) и начинается согласованное уменьшение длин стержней боковых граней (ΔABD, ΔBDE, ΔВСЕ, ΔCEF, ΔACF, ΔADF), линейные приводы 2 которых останавливаются по команде от СУ 11 после уменьшения длин стержней до заданных значений (фиг.4, а, цикл 2), определяемых по показаниям датчиков относительного линейного перемещения 5 и пространственного положения 9. Затем по команде от СУ 11 производится увеличение длин стержней тыльной грани (ΔАВС) до установления контакта и распорной фиксации радиальных упоров ее вершин 7 с внутренней поверхностью с заданным усилием, которое определяют по показаниям датчиков силы 3. После этого линейные приводы 2 останавливаются и производятся вычисления пространственных координат вершин 7 по показаниям датчиков относительного линейного перемещения 5 и пространственного положения 9 (фиг.4, а, цикл 3). Затем по команде от СУ 11 производится уменьшение длин стержней фронтальной грани (ΔDEF) и после расфиксации ее вершин 7 с контактируемой поверхностью, момент которой определяется по показаниям датчиков силы 3, относительного линейного перемещения 5 и пространственного положения 9, по команде от СУ 11 производится остановка линейных приводов 2 стержней фронтальной грани (фиг.4, а, цикл 4) и начинается согласованное увеличение длин стержней боковых граней (ΔABD, ΔBDE, ΔВСЕ, ΔCEF, ΔACF, ΔADF), линейные приводы 2 которых останавливаются по команде от СУ 11 после увеличения длин стержней до заданных значений (фиг.4, а, цикл 5), определяемых по показаниям датчиков относительного линейного перемещения 5 и пространственного положения 9. Далее по команде от СУ 11 увеличиваются длины стержней фронтальной грани (ΔDEF) до момента установления контакта и распорной фиксации радиальных упоров ее вершин 7 с внутренней поверхностью с заданным усилием, которое определяется по показаниям датчиков силы 3. После этого линейные приводы 2 фронтальной грани останавливаются и производятся вычисления пространственных координат вершин 7 по показаниям датчиков относительного линейного перемещения 5 и пространственного положения 9 (фиг.4, а, исходное положение). Далее алгоритм движения октаэдрного модуля 1 повторяют. Траектория перемещения вершин 7 граней по внутренней поверхности может быть задана прямолинейной, винтовой или комбинированной, при этом запоминаются пространственные координаты вершин 7 граней относительно базовой системы координат и время моментов их фиксации с контактируемой поверхностью и по их значениям судят о траектории движения и скорости перемещения адаптивного мобильного пространственного робота-манипулятора Саяпина-Синева.
2-й режим - продольное или винтовое самоперемещение октаэдрного модуля 1 по наружной замкнутой поверхности колонного, арочного или другого типа (фиг.5). Перед перемещением производят расстыковку шарнирных узлов до размыкания стержней тыльной (ΔАВС), фронтальной (ΔDEF) и одной из боковых граней, например отсоединение концов стержней EF и CF от вершины F и конца стержня АС от вершины С, осуществляют охват стержнями тыльной и фронтальной гранями наружной контактируемой поверхности и восстанавливают их шарнирные соединения в вершинах F и С, затем осуществляют попеременное перемещение относительно друг друга и относительно замкнутой наружной поверхности тыльной и фронтальной граней (ΔАВС и ΔDEF). При этом в начальный момент времени линейные приводы 2 стержней АВ, ВС, СА, DE, EF и FD включают на обратный ход и после уменьшения длин стержней до момента установления контакта радиальных упоров (условно не показаны) срединных участков стержней тыльной (ΔАВС) и фронтальной (ΔDEF) граней и достижения заданного усилия, определяемого по показаниям датчиков силы 4, происходит фиксация тыльной и фронтальной граней с наружной замкнутой поверхностью и линейные приводы 2 стержней этих граней отключаются и вычисляются пространственные координаты всех точек контакта упоров срединных участков стержней с наружной поверхностью относительно базовой системы координат (фиг.5, исходное положение), затем по команде СУ 11 включаются линейные приводы 2 фронтальной грани (ΔDEF) на прямой ход и увеличиваются длины ее стержней до момента расфиксации радиальных упоров их срединных участков с наружной контактируемой поверхностью, который определяется по показаниям датчиков силы 4, относительного линейного перемещения 5 и пространственного положения 9. После этого по команде от СУ 11 производится остановка линейных приводов 2 стержней фронтальной грани (фиг.5, цикл 1) и начинается согласованное увеличение длин стержней боковых граней (ΔABD, ΔBDE, ΔВСЕ, ΔCEF, ΔACF, ΔADF), линейные приводы 2 которых останавливаются по команде от СУ 11 после увеличения длин стержней до заданных значений (фиг.5, цикл 2), определяемых по показаниям датчиков относительного линейного перемещения 5 и пространственного положения 9. Затем по команде от СУ 11 производится уменьшение длин стержней фронтальной грани (ΔDEF) до установления контакта радиальных упоров срединных участков стержней с наружной поверхностью и фиксации с ней фронтальной грани с заданным усилием, которое определяют по показаниям датчиков силы 4. После этого по команде от СУ 11 линейные приводы 2 останавливаются и производится вычисление пространственных координат всех точек контакта упоров срединных участков стержней с наружной поверхностью относительно базовой системы координат по показаниям датчиков относительного линейного перемещения 5 и пространственного положения 9 (фиг.5, цикл 3). Затем по команде от СУ 11 производят увеличение длин стержней тыльной грани (ΔАВС) и после расфиксации радиальных упоров срединных участков стержней с наружной контактируемой поверхностью, момент которой определяется по показаниям датчиков силы 4, относительного линейного перемещения 5 и пространственного положения 9, по команде от СУ 11 производится остановка линейных приводов 2 стержней тыльной грани (фиг.5, цикл 4) и начинается согласованное уменьшение длин стержней боковых граней (ΔABD, ΔBDE, ΔВСЕ, ΔCEF, ΔACF, ΔADF), линейные приводы 2 которых останавливаются по команде от СУ 11 после уменьшения длин стержней до заданных значений, определяемых по показаниям датчиков относительного линейного перемещения 5 и пространственного положения 9 (фиг.5, цикл 5). Далее по команде от Су 11 линейные приводы 2 тыльной грани (ΔАВС) включаются на обратный ход и уменьшаются длины ее стержней до момента установления контакта радиальных упоров срединных участков стержней тыльной грани с наружной контактируемой поверхностью с заданным усилием, которое определяют по показаниям датчиков силы 4. После этого линейные приводы 2 тыльной грани (ΔАВС) останавливаются и производится вычисление пространственных координат всех точек контакта упоров срединных участков стержней с наружной поверхностью относительно базовой системы координат по показаниям датчиков относительного линейного перемещения 5 и пространственного положения 9 (фиг.5, исходное положение). Далее алгоритм движения октаэдрного модуля 1 повторяют. Траектория перемещения точек контакта радиальных упоров срединных участков стержней по наружной поверхности может быть задана прямолинейной, винтовой или комбинированной, при этом запоминаются пространственные координаты точек контакта радиальных упоров срединных участков стержней тыльной и фронтальной граней относительно базовой системы координат и время моментов их фиксации с контактируемой поверхностью и по их значениям судят о траектории движения и скорости перемещения адаптивного мобильного пространственного робота-манипулятора Саяпина-Синева по наружной поверхности.
3-й режим - самоперемещение октаэдрного модуля 1 внутри колена или тройника трубчатого профиля (фиг.4, г). В данном режиме перед местом нахождения отвода колена или тройника согласованным изменением длин стержней октаэдрного модуля 1 осуществляют его трансформирование в положение, при котором вершины 7 одного из трех общих оснований (ADEC, BDFC, ABEF) четырехгранных пирамид устанавливают враспор внутри трубчатого профиля таким образом, чтобы оси симметрии соответствующей пары параллельных граней октаэдрного модуля 1 совпали с продольной осью отвода колена или тройника, и после этого осуществляют самоперемещение октаэдрного модуля 1 по внутренней поверхности отвода аналогично продольному или винтовому самоперемещению по внутренней замкнутой поверхности (режим 1).
4-й режим - перемещение с помощью октаэдрного модуля 1 протяженных охватываемых предметов округлой формы внутри замкнутой поверхности (фиг.6 и 7). В этом режиме октаэдрный модуль 1 адаптивного мобильного пространственного робота-манипулятора Саяпина-Синева размещают во внутренней замкнутой поверхности и фиксируют фронтальную грань, например ΔDEF. Затем конец протяженного перемещаемого предмета, например трубы, стержня, кабеля и т.д., устанавливают внутри тыльной грани (ΔАВС) (фиг.6 и 7, исходные положения), включают линейные приводы 2 на обратный ход и уменьшают длины ее стержней до момента схватывания конца перемещаемого предмета с заданным усилием, которое определяют по показаниям датчиков силы 4 радиальных упоров срединных участков стержней тыльной грани (ΔАВС). Затем по команде от СУ 11 линейные приводы 2 отключаются и вычисляются пространственные координаты вершин 7 граней относительно базовой системы координат. После фиксации перемещаемого предмета (фиг.6, цикл 1) согласованно уменьшают длины стержней боковых граней (ΔABD, ΔBDE, ΔВСЕ, ΔCEF, ΔACF, ΔADF), при этом тыльную грань перемещают вместе с предметом внутри замкнутой поверхности на фиксированную длину (фиг.6, цикл 2), которую запоминают относительно базовой системы координат, затем длины стержней тыльной грани увеличивают до полной расфиксации радиальных упоров их срединных участков с перемещаемым предметом (фиг.6, цикл 3) и фиксируют перемещаемый предмет от возможности перемещения в обратном направлении (фиг.6, а, цикл 3). Затем увеличивают длины стержней боковых граней до исходного положения (фиг.6, исходное положение). После этого операцию по перемещению предмета повторяют необходимое количество раз и по окончании процесса определяют суммарную длину его перемещения. Следует отметить, что перемещение протяженного предмета может производиться как без направляющего устройства (фиг.6, а), так и с ним (фиг.6, б). При этом в случае не использования направляющего устройства в цикле 3 требуется дополнительно фиксировать предмет от перемещения в обратном направлении, а в случае применения направляющего устройства (фиг.6, б) указанной фиксации перемещаемого предмета не требуется. При необходимости возможно также организовать комбинированное перемещение из сочетания 1-го и 3-го режимов. В этом случае перемещение предмета будет происходить с одновременным самоперемещением октаэдрного модуля 1 внутри замкнутой поверхности (фиг.7). В отличие от режима 3 (фиг.6, б) длины стержней тыльной грани (ΔАВС) увеличиваются не до момента расфиксации с протяженным предметом, а до момента наступления распорной фиксации с заданным усилием вершин 7 тыльной грани (ΔАВС) с внутренней замкнутой поверхностью, которое определяют по показаниям датчиков силы 3. После этого линейные приводы 2 останавливаются и производятся вычисления пространственных координат вершин 7 по показаниям датчиков относительного линейного перемещения 5 и пространственного положения 9. Затем по команде от СУ 11 включаются линейные приводы 2 стержней фронтальной грани (ΔDEF) на обратный ход, производится уменьшение их длин до наступления схватывания (перехвата) перемещаемого предмета радиальными упорами срединных участков этих стержней с заданным усилием, определяемым по показаниям датчиков силы 4. После этого по команде от СУ 11 линейные приводы 2 останавливаются и производятся вычисления пространственных координат вершин 7 по показаниям датчиков относительного линейного перемещения 5 и пространственного положения 9 (фиг.7, цикл 4) и только после этого увеличиваются длины стержней боковых граней, при которых происходит перемещение самого предмета внутри замкнутой поверхности (фиг.7, цикл 5). Далее увеличиваются длины стержней фронтальной грани (ΔDEF) до наступления момента распорной фиксации вершин 7 тыльной грани (ΔАВС) с внутренней замкнутой поверхностью с заданным усилием, которое определяют по показаниям датчиков силы 3. После этого линейные приводы 2 останавливаются и производятся вычисления пространственных координат вершин 7 по показаниям датчиков относительного линейного перемещения 5 и пространственного положения 9 (фиг.7, исходное положение). Таким образом, в этом режиме происходит перемещение не только протяженного предмета, а вместе с ним и самого октаэдрного модуля 1. В результате этого увеличивается расстояние перемещения предмета относительно внутренней замкнутой поверхности при том же количестве циклов (операций).
5-й режим - организации с помощью спаренных октаэдрных модулей перемещения предметов внутри замкнутой поверхности с одновременным их пространственным позиционированием и виброзащитой (фиг.8). Для организации работы в этом режиме октаэдрные модули объединяют с образованием общей грани, при этом с помощью одного из них осуществляют перемещение по внутренней замкнутой поверхности аналогично режиму 1 (исходные положения самоперемещающегося октаэдрного модуля и циклы 2-6 режима 5 совпадают с исходными положениями и циклами 1 -5 режима 1, показанных на фиг.8 и фиг.4-а соответственно), а с помощью смежного октаэдрного модуля осуществляют захват предмета подобно схватыванию перемещаемого предмета в режиме 4 (цикл 2 на фиг.8 совпадает с циклом 1 на фиг.6 и 7), его позиционирование и виброзащиту в процессе перемещения по внутренней замкнутой поверхности. При этом усилие схватывания предмета и его пространственное положение, а также величины ударно-вибрационных воздействий от самоперемещающегося октаэдрного модуля к перемещаемому октаэдрному модулю с предметом контролируют с помощью датчиков силы 4, пространственного положения 9 и ускорений 10, установленных в радиальных опорах тыльной грани (общая грань самоперемещающегося и перемещаемого октаэдрных модулей) перемещаемого октаэдрного модуля, а также датчиков относительных линейных перемещений 5 и скорости 6, установленных в стержнях его боковых граней. При этом при организации виброзащиты перемещаемого предмета управление осуществляется линейными приводами 2 стержней боковых граней перемещаемого с предметом октаэдрного модуля путем согласованного изменения их длин по командам от СУ 11, формируемым по показаниям датчиков ускорений 10, установленных на вершинах 7 фронтальной и тыльной граней перемещаемого с предметом октаэдрного модуля, а также по показаниям датчиков относительных линейных перемещений 5 и датчиков относительной скорости 6, установленных на каждом из стержней боковых граней перемещаемого с предметом модуля. Здесь от совмещенных датчиков пространственного положения 9 и ускорений 10 тыльной грани перемещаемого с предметом октаэдрного модуля и датчиков относительных линейных перемещений 5 и скорости 6 стержней его боковых граней СУ 11 осуществляет управление по обратным связям (основной алгоритм управления), а от совмещенных датчиков пространственного положения 9 и ускорений 10 фронтальной грани перемещаемого с предметом октаэдрного модуля на это основное управление накладывается дополнительный сигнал управления, который называется инвариантным. Суть его состоит в том, что он делает ускорения, измеряемые датчиками ускорений 10, установленными на вершинах 7 тыльной грани перемещаемого с предметом октаэдрного модуля, равными нулю, т.е. как бы тыльная грань становится неподвижной в инерциальном пространстве (это утверждение справедливо только для области низких частот, которую пропускают линейные приводы 2). В то же время, если датчики ускорений 10 вершин 7 фронтальной грани зафиксируют большие значения ускорений, то относительное положение вершин 7 может выйти за допустимые пределы перемещений. Для предотвращения этой ситуации, когда перемещение предельно допустимой величины, включается другой алгоритм управления, заключающийся в следующем. Сигналы от датчиков ускорений 10, установленных на вершинах 7 фронтальной грани перемещаемого с предметом октаэдрного модуля отключатся и система управляется по обратным связям от датчиков ускорений 10, установленным на вершинах 7 тыльной грани перемещаемого с предметом октаэдрного модуля, и датчиков относительных линейных перемещений 5 стержней боковых граней указанного октаэдрного модуля. Это происходит до тех пор, пока относительные перемещения не достигнут величин, меньших, чем предельно допустимые, упомянутые выше, после чего включается основной алгоритм управления. Позиционирование перемещаемого предмета в пространстве осуществляют согласованным изменением длин линейных приводов 2 стержней боковых граней перемещаемого с предметом октаэдрного модуля по командам от СУ 11, формируемым по показаниям датчиков относительных линейных перемещений 5, установленных на стержнях указанных боковых граней, и датчиков пространственного положения 9, установленных на вершинах 7 фронтальной и тыльной граней перемещаемого с предметом октаэдрного модуля.
6-й режим - осуществление контроля геометрической формы внутренней и наружной контактируемых поверхностей (фиг.9). В процессе перемещения октаэдрного модуля 1 адаптивного мобильного пространственного робота-манипулятора Саяпина-Синева (см. фиг.4 и 5) перед каждым продольным перемещением тыльной (ΔАВС) и фронтальной (ΔDEF) граней осуществляют поочередно их дискретные повороты в обе стороны с заданным шагом относительно направления перемещения (положения ΔD-1E-1F-1, ΔDEF, ΔD1E1F1, ΔD2E2F2 и т.д. для фронтальной грани и ΔА-1В-1С-1, ΔАВС, ΔА1В1С1, ΔА2В2С2 и т.д. для тыльной грани) и для каждого дискретного положения устанавливают механический контакт радиальных упоров вершин 7 указанных граней с внутренней контактируемой поверхностью или радиальных упоров срединных участков тыльной и фронтальной граней соответственно с наружной контактируемой поверхностью и определяют их пространственные координаты относительно базовой системы координат, по их значениям судят о геометрической форме внутренней или наружной контактируемых поверхностей. При этом заданные усилия контактов с внутренней поверхностью определяются по показаниям датчиков силы 3, а контактов с наружной поверхностью - по показаниям датчиков силы 4, а пространственное положение вершин 7 тыльной и фронтальной граней (ΔАВС, ΔDEF) - по показаниям датчиков относительных линейных перемещений 5 линейных приводов 2 стержней боковых граней и датчиков пространственного положения 9 вершин 7.
7-й режим - осуществление с помощью октаэдрного модуля 1 контроля физико-механических свойств материала контактируемой поверхности. В этом режиме радиальные упоры вершин 7 граней доводят до механического контакта с внутренней поверхностью с заданным усилием, которое определяют по показаниям датчиков силы 3. Затем по показаниям датчиков относительных линейных перемещений 5 и пространственного положения 9 определяют их пространственное положение относительно базовой системы координат. После этого увеличивают усилие прижима радиальных упоров вершин граней до заданного значения и определяют их пространственное положение относительно базовой системы координат, затем процедуру повторяют с первоначальным усилием и по различиям в значениях пространственных координат радиальных упоров вершин 7 судят об упруго-пластических свойствах материала контактируемой поверхности. При этом при заданных усилиях прижима электрических контактов радиальных упоров к внутренней контактируемой поверхности производят измерение в них с помощью датчиков температуры 8 значений температуры и электрического сопротивления между ними и по ним судят о физических свойствах материала контактируемой поверхности. Аналогично возможно проведение измерений температуры и электрического сопротивления наружной контактируемой поверхности. Также для внутренней контактируемой поверхности возможно организовать ее вибрационную диагностику, включая определение наличия в ней механических дефектов, например трещин в трубах и т.п. Для этого периодически ускоренным движением линейных приводов 2 стержней тыльной или фронтальной граней организуют ударные и вибрационные воздействия радиальными упорами вершин 7 этих граней на контактируемую поверхность и по показаниям датчиков ускорений 10 осуществляют вибрационную диагностику контролируемого объекта.
8-й режим - организация с помощью октаэдрного модуля 1 вращения и подачи обрабатывающего инструмента, например бура или сверла (фиг.10), и его пространственного перемещения. Для этого хвостовик инструмента выполняют в виде коленвала с вращающейся втулкой на конце, ограниченной от осевого перемещения (на фиг.10 вращающаяся втулка условно не показана). Вращающуюся втулку зажимают радиальными упорами участков стержней фронтальной грани. При этом каждый из упоров может быть жестко связан с одной из секций трехсекционной разрезной втулки, выполненной с возможностью зажатия вращающейся втулки хвостовика инструмента. При этом требуемое усилие обеспечивают по показаниям датчиков силы 4 фронтальной грани. Радиальные упоры тыльной граны фиксируют с контактируемой внутренней поверхностью аналогично предыдущим режимам. Затем согласованным изменением длин стержней боковых граней подводят режущую часть инструмента в точку обработки, выставляют в пространстве ось вращения инструмента и обеспечивают требуемое усилие резания, определяемое по показаниям датчиков силы 3, установленных на стержнях боковых граней. После этого согласованным изменением длин стержней боковых граней осуществляют перемещение оси вращения зажатой подвижной втулки по окружности, перпендикулярной оси вращения инструмента и имеющей радиус, равный радиусу коленвала, при этом в процессе вращения инструмента согласованным увеличением стержней боковых граней организуют его продольную подачу с заданным усилием и с возможностью генерирования ударно вибрационных воздействий в комбинации с вращением инструмента, при этом пространственное положение, усилие резания и величину ударно-вибрационных воздействий обрабатываемого инструмента контролируют с помощью датчиков пространственного положения 9 и ускорений 10, установленных в радиальных опорах фронтальной грани, а также датчиков силы 3, относительных линейных перемещений 5 и скорости 6, установленных в стержнях боковых граней. Ось вращения обрабатывающего инструмента может устанавливаться соосно с осью симметрии октаэдрного модуля 1 (фиг.10, а) или эксцентрично (фиг.10, б).
9-й режим - организация с помощью октаэдрного модуля 1 ударно-вибрационного воздействия долбежным инструментом на торцевую поверхность трубчатого профиля (фиг.11). В этом режиме долбежный инструмент устанавливают в каждой из вершин фронтальной грани (устройства зажима хвостовика долбежного инструмента на фиг.11 условно не показаны), а упоры тыльной грани фиксируют с контактируемой внутренней поверхностью аналогично предыдущим режимам. Затем согласованным изменением длин стержней боковых граней подводят рабочие части долбежных инструментов до контакта с торцевой поверхностью в место обработки и начинают обработку с заданной частотой, амплитудой и усилием. При этом изменением длин стержней боковых граней в процессе обработки обеспечивают возможность одиночного (фиг.11, б), попарного и тройного (фиг.11, б) воздействий долбежных инструментов в месте обработки, причем для одиночного и попарного воздействия обеспечивают при необходимости изменения последовательности их воздействий, при этом в каждом из видов воздействий пространственное положение, усилие резания и величину ударно-вибрационных воздействий долбежного инструмента контролируют с помощью датчиков пространственного положения 9 и ускорений 10, установленных в радиальных опорах фронтальной грани, а также датчиков силы 3, относительных линейных перемещений 5 и скорости 6, установленных в стержнях боковых граней.
Применение в составе СУ 11 нейрокомпьютера 12 с соответствующим программно-алгоритмическим обеспечением 13 позволяет организовать работу в приведенных режимах в масштабе реального времени.
Приведенные адаптивный мобильный пространственный робот-манипулятор Саяпина-Синева и способ организации движений и контроля физико-механических свойств и геометрической формы контактируемой поверхности и траектории перемещения с его помощью могут быть реализованы на базе имеющихся на сегодняшний день разработок и функционирующих устройств. Так, известны «Способ подавления помех от колебаний упругой конструкции космической трансформируемой антенны в процессе эксплуатации и устройство для его осуществления» (Патент на изобретение РФ №2161109, МПК D64G 1/00, 1/22, 3/00, заявлено 10.09.1999; опубл. 27.12.2000, Бюл. №36), в описании которого представлены сведения об организации пространственной виброзащиты и позиционирования объекта с помощью пространственного механизма.
Сведения о возможности реализации совмещенных датчиков пространственного положения и ускорений, представляющих миниатюрные трехосные блоки гироскопов-акселерометров, выполненных, например, в виде микромеханических вибрационных гироскопов-акселерометров, представлены в описании патента РФ №2064682 «Микромеханический вибрационный гироскоп-акселерометр», МПК G01P 15/-97, заявлено 28.09.1993; опубл. 27.07.1996, Бюл. №21.
В качестве линейных приводов могут быть использованы широко применяемые в машиностроении электромеханические, гидравлические и пневматические линейные приводы.
Предлагаемое изобретение может быть использовано для эксплуатации в наземной, подземной, подводной, авиационно-космический технике и приборостроении и направлено на качественное расширение функциональных возможностей и повышение надежности. Указанные преимущества могут быть обеспечены за счет:
- организации возможности его подвижности и адаптации к поверхностям перемещения и перемещаемого объекта (предмета), в частности к протяженной замкнутой внутренней поверхности тоннельного или скважинного типа, а также к наружной поверхности колонного типа, которые могут иметь переменное по длине поперечное сечение и искривленную траекторию движения;
- организации возможности прохождения манипулятором внутренних участков труб, соединенных под прямым углом без радиусного перехода;
- организации с его помощью возможности контроля физико-механических свойств (например, при проведении каротажа скважин, имеющих отклонение от вертикальной оси), геометрической формы контактируемых с ним поверхностей и траектории его движения как в прозрачной, так и непрозрачной (для оптических, радио, УЗ и др. физических методов контроля) окружающих средах;
- организации возможности схватывать (зажимать) предметы произвольной формы, например обрабатывающие инструменты, и совершать ими полнооборотные вращательные движения, а также генерировать и контролировать вибрационные и ударные воздействия при их взаимодействии с контактируемыми поверхностями;
- манипулятор представляет собой модульную конструкцию и имеет возможность пространственного наращивания.
Изобретение относится к робототехнике. Технический результат - расширение функциональных возможностей и повышение надежности. Робот-манипулятор содержит пространственную структуру в виде октаэдрного модуля в исходном положении, ребра которого выполнены в виде стержней, концы которых шарнирно соединены в вершинах октаэдрного модуля. При этом стержни снабжены линейными приводами с датчиками относительного перемещения, причем стержни выполнены с возможностью изменения их длины по управляющим командам на линейные приводы от системы управления. Все грани октаэдрного модуля выполнены с возможностью соединения через них с подобными модулями и все стержни снабжены шарнирными соединениями на концах, выполненных в виде сферических шарниров. Вершины октаэдрного модуля и срединные участки стержней тыльной грани, расположенной с противоположной стороны от направления движения и параллельной ей фронтальной грани, расположенной со стороны направления движения, снабжены радиальными упорами с датчиками температуры и электрическими контактами с возможностью образования адаптивных схватов и фиксирующих опор робота-манипулятора. 2 н. и 12 з.п. ф-лы, 11 ил.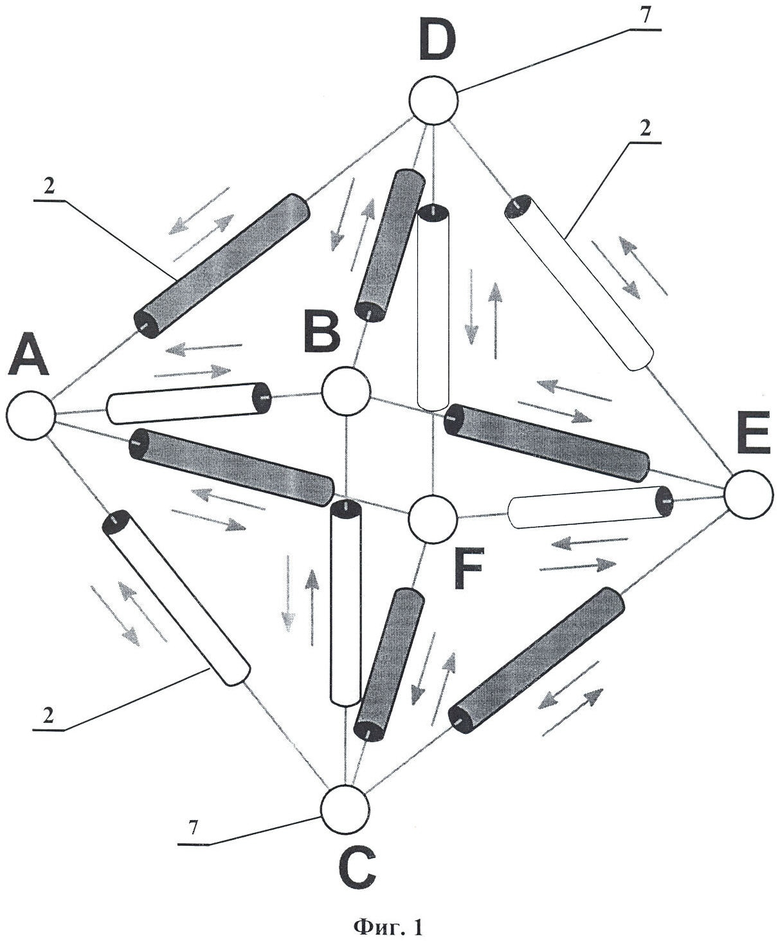
1. Адаптивный мобильный пространственный робот-манипулятор, содержащий пространственную структуру в виде октаэдрного модуля в исходном положении, ребра которого выполнены в виде стержней, концы которых шарнирно соединены в вершинах октаэдрного модуля, при этом стержни снабжены линейными приводами с датчиками относительного перемещения, причем стержни выполнены с возможностью изменения их длины по управляющим командам на линейные приводы от системы управления, при этом все грани октаэдрного модуля выполнены с возможностью соединения через них с подобными модулями, и все стержни октаэдрного модуля снабжены шарнирными соединениями на концах, выполненных в виде сферических шарниров, при этом вершины октаэдрного модуля и срединные участки стержней тыльной грани, расположенной с противоположной стороны от направления движения и параллельной ей фронтальной грани, расположенной со стороны направления движения, снабжены радиальными упорами с датчиками температуры и изолированными друг от друга электрическими контактами с возможностью образования адаптивных схватов и фиксирующих опор робота-манипулятора, при этом каждый из стержней снабжен датчиками относительного перемещения и относительной скорости, упоры снабжены датчиками силы, а вершины октаэдра снабжены совмещенными датчиками пространственного положения и ускорений, выполненными в виде миниатюрных трехосных блоков гироскопов-акселерометров, при этом линейные приводы, датчики силы, температуры, относительного перемещения и относительной скорости и совмещенные датчики пространственного положения и ускорений электрически соединены через аналого-цифровые преобразователи с системой управления, выполненной с возможностью оперативного контроля и управления в реальном режиме времени.
2. Робот-манипулятор по п.1, характеризующийся тем, что линейные приводы выполнены с увеличенным рабочим ходом, например, телескопическими.
3. Робот-манипулятор по п.1, характеризующийся тем, что шарнирные соединения на концах стержней выполнены в виде упругих шарниров из сверхупругого материала.
4. Робот-манипулятор по п.1, характеризующийся тем, что миниатюрные трехосные блоки гироскопов-акселерометров датчиков пространственного положения и ускорений выполнены в виде микромеханических вибрационных гироскопов-акселерометров.
5. Способ эксплуатации адаптивного мобильного пространственного робота-манипулятора, выполненного по любому из пп.1-4, включающий управление пространственным перемещением вершин октаэдрного модуля путем контроля длин всех стержней и определения пространственных координат вершин относительно базовой системы координат с помощью датчиков относительного перемещения и системы управления и формирования управляющих команд для линейных приводов стержней.
6. Способ по п.5, характеризующийся тем, что для его продольного или винтового самоперемещения по внутренней замкнутой поверхности трубчатого, тоннельного, скважинного типа осуществляют попеременное перемещение относительно друг друга двух параллельных граней, при этом в начальный момент времени увеличивают длины стержней противоположных граней, которые располагают поперек направления предполагаемого движения до момента установления контакта радиальных упоров их вершин с внутренней поверхностью и фиксируют с заданным усилием, которое определяют по показаниям датчиков силы, после этого линейные приводы отключают и вычисляют координаты вершин граней относительно базовой системы координат, затем уменьшают длины стержней тыльной грани и после расфиксации ее вершин с контактируемой поверхностью линейные приводы стержней тыльной грани останавливают и согласованно уменьшают длины стержней боковых граней, линейные приводы которых останавливают после уменьшения длин стержней до заданных значений, затем увеличивают длины стержней тыльной грани до установления контакта радиальных упоров ее вершин с внутренней поверхностью и фиксируют с заданным усилием, которое определяют по показаниям датчиков силы, после этого производят уменьшение длин стержней фронтальной грани и после расфиксации ее вершин с контактируемой поверхностью линейные приводы стержней грани останавливают и согласованно увеличивают длины стержней боковых граней, линейные приводы которых останавливают после увеличения длин стержней до заданных значений, затем увеличивают длины стержней фронтальной грани до установления контакта радиальных упоров ее вершин с внутренней поверхностью и фиксируют с заданным усилием, которое определяют по показаниям датчиков силы, затем алгоритм движения повторяют, при этом траекторию перемещения вершин граней по внутренней поверхности выбирают прямолинейной, или винтовой, или комбинированной, при этом запоминают пространственные координаты вершин граней относительно базовой системы координат и время моментов их фиксации с контактируемой поверхностью и по их значениям определяют траекторию перемещения и скорость перемещения адаптивного мобильного пространственного робота-манипулятора.
7. Способ по п.5, характеризующийся тем, что для его продольного или винтового самоперемещения по наружной поверхности колонного или арочного типа перед перемещением производят расстыковку шарнирных узлов до размыкания стержней тыльной, фронтальной и одной из боковых граней, осуществляют охват стержнями тыльной и фронтальной гранями наружной контактируемой поверхности и восстанавливают их шарнирные соединения, затем осуществляют попеременное перемещение относительно друг друга тыльной и фронтальной граней, при этом в начальный момент времени уменьшают длины их стержней до момента установления контакта радиальных упоров срединных участков стержней тыльной и фронтальной граней с наружной поверхностью и фиксируют с заданным усилием, которое определяют по показаниям датчиков силы, после этого линейные приводы отключают и вычисляют координаты всех точек контакта относительно базовой системы координат, затем увеличивают длины стержней фронтальной грани и после расфиксации радиальных упоров срединных участков стержней с наружной контактируемой поверхностью линейные приводы стержней фронтальной грани останавливают и согласованно увеличивают длины стержней боковых граней, линейные приводы которых останавливают после увеличения длин стержней до заданных значений, затем уменьшают длины стержней фронтальной грани до установления контакта радиальных упоров срединных участков стержней с наружной поверхностью и фиксируют с заданным усилием, которое определяют по показаниям датчиков силы, после этого производят увеличение длин стержней фронтальной грани и после расфиксации радиальных упоров срединных участков стержней с наружной контактируемой поверхностью линейные приводы стержней тыльной грани останавливают и согласованно уменьшают длины стержней боковых граней, линейные приводы которых останавливают после уменьшения длин стержней до заданных значений, затем уменьшают длины стержней тыльной грани до установления контакта радиальных упоров срединных участков стержней с наружной контактируемой поверхностью и фиксируют с заданным усилием, которое определяют по показаниям датчиков силы, затем алгоритм движения повторяют, при этом траекторию перемещения точек контакта радиальных упоров срединных участков стержней по наружной поверхности выбирают прямолинейной, или винтовой, или комбинированной, при этом запоминают пространственные координаты точек контакта радиальных упоров срединных участков стержней тыльной и фронтальной граней относительно базовой системы координат и время моментов их фиксации с контактируемой поверхностью и по их значениям определяют траекторию перемещения и скорость перемещения адаптивного мобильного пространственного робота-манипулятора по наружной поверхности.
8. Способ по п.5, характеризующийся тем, что для его самоперемещения внутри колена или тройника трубчатого профиля перед отводом колена или тройника октаэдрный модуль трансформируют в четырехгранную пирамиду, вершины которой устанавливают враспор внутри колена или тройника трубчатого профиля таким образом, чтобы оси симметрии соответствующей пары параллельных граней октаэдрного модуля совпали с продольной осью отвода колена или тройника и после этого осуществляют по отводу продольное или винтовое самоперемещение по внутренней замкнутой поверхности колена или тройника трубчатого профиля.
9. Способ по п.5, характеризующийся тем, что осуществляют перемещение протяженных предметов округлой формы внутри замкнутой поверхности путем размещения адаптивного мобильного пространственного робота-манипулятора во внутренней замкнутой поверхности, при этом фиксируют фронтальную грань, затем конец перемещаемого предмета устанавливают внутри тыльной грани и уменьшают длины ее стержней, после фиксации перемещаемого предмета согласованно уменьшают длины стержней боковых граней, при этом тыльную грань перемещают вместе с предметом внутри замкнутой поверхности на фиксированную длину, которую запоминают относительно базовой системы координат, затем длины стержней тыльной грани увеличивают до полной расфиксации радиальных упоров их срединных участков с перемещаемым предметом и увеличивают длины стержней боковых граней до исходного положения, затем операцию с перемещением предмета повторяют в необходимом количестве, а по окончании процесса определяют суммарную длину перемещения протяженного предмета.
10. Способ по п.5, характеризующийся тем, что осуществляют перемещение предметов с одновременным их пространственным позиционированием и виброзащитой, при этом октаэдрные модули объединяют с образованием общей грани, при этом с помощью одного из них осуществляют перемещение по внутренней замкнутой поверхности, а с помощью смежного модуля осуществляют захват предмета, его позиционирование и виброзащиту в процессе перемещения, при этом пространственное положение и величины ударно-вибрационных воздействий от самоперемещающегося модуля к перемещаемому предмету контролируют с помощью датчиков силы и пространственного положения и ускорений, установленных в радиальных опорах тыльной грани, а также датчиков относительных перемещений и скорости, установленных в стержнях боковых граней.
11. Способ по п.5, характеризующийся тем, что осуществляют контроль геометрической формы внутренней или наружной контактируемых поверхностей, при этом в процессе перемещения адаптивного мобильного пространственного робота-манипулятора перед каждым продольным перемещением тыльной и фронтальной граней осуществляют их дискретные повороты с заданным шагом относительно направления перемещения и для каждого дискретного положения устанавливают механический контакт радиальных упоров вершин граней с внутренней контактируемой поверхностью или радиальных упоров срединных участков тыльной и фронтальной граней соответственно с наружной контактируемой поверхностью и определяют их пространственные координаты относительно базовой системы координат, и по их значениям определяют геометрическую форму внутренней или наружной контактируемых поверхностей.
12. Способ по п.5, характеризующийся тем, что осуществляют контроль физико-механических свойств материала контактируемой поверхности, при этом радиальные упоры вершин граней адаптивного мобильного пространственного робота-манипулятора доводят до механического контакта с поверхностью с заданным усилием, определяют их пространственное положение относительно базовой системы координат, увеличивают усилие прижима радиальных упоров вершин граней до заданного значения и определяют их пространственное положение относительно базовой системы координат, затем алгоритм повторяют с первоначальным усилием и по различиям в значениях пространственных координат радиальных упоров определяют упругопластические свойства материала контактируемой поверхности, при этом при заданных усилиях прижима электрических контактов радиальных упоров производят измерение в них значений температуры и электрического сопротивления между ними и по ним определяют физические свойства материала контактируемой поверхности, при этом периодически ускоренным движением линейных приводов стержней граней организуют ударные и вибрационные воздействия радиальными упорами вершин граней на контактируемую поверхность и по показаниям акселерометров осуществляют вибрационную диагностику контролируемой поверхности, включая определение наличия в ней механических дефектов.
13. Способ по п.5, характеризующийся тем, что осуществляют вращение обрабатывающего инструмента, хвостовик которого выполнен в виде коленвала с вращающейся втулкой на конце, при этом втулку зажимают радиальными упорами срединных участков стержней фронтальной грани, а радиальные упоры тыльной грани фиксируют с контактируемой внутренней поверхностью, затем согласованным изменением длин стержней боковых граней подводят режущую часть обрабатывающего инструмента в точку обработки, выставляют в пространстве ось вращения обрабатывающего инструмента и обеспечивают требуемое усилие резания, затем согласованным изменением длин стержней боковых граней осуществляют перемещение оси вращения зажатой подвижной втулки по окружности, перпендикулярной оси вращения инструмента и имеющей радиус, равный радиусу коленвала, при этом в процессе вращения инструмента согласованным увеличением стержней боковых граней организуют его продольную подачу с заданным усилием и с возможностью генерирования ударно вибрационных воздействий в комбинации с вращением инструмента, при этом пространственное положение, усилие резания и величину ударно-вибрационных воздействий обрабатывающего инструмента контролируют с помощью датчиков силы и пространственного положения и ускорений, установленных в радиальных опорах фронтальной грани, а также датчиков относительных перемещений и скорости, установленных в стержнях боковых граней.
14. Способ по п.5, характеризующийся тем, что осуществляют ударно-вибрационное воздействие долбежным инструментом на торцевую поверхность трубчатого профиля, при этом долбежный инструмент устанавливают в каждой из вершин фронтальной грани, а упоры тыльной грани фиксируют с контактируемой внутренней поверхностью, затем согласованным изменением длин стержней боковых граней подводят рабочие части долбежных инструментов до контакта с торцевой поверхностью в место обработки и начинают обработку с заданной частотой, амплитудой и усилием, при этом изменением длин стержней боковых граней в процессе обработки обеспечивают возможность одиночного, или попарного, или тройного воздействий долбежных инструментов в месте обработки, причем для одиночного и попарного воздействия обеспечивают при необходимости изменения последовательности их воздействий, при этом пространственное положение, усилие резания и величину ударно-вибрационных воздействий долбежного инструмента контролируют с помощью датчиков силы и пространственного положения и ускорений, установленных в радиальных опорах фронтальной грани, а также датчиков относительных перемещений и скорости, установленных в стержнях боковых граней.
| RU 2007101752 А, 27.07.2008 | |||
| МОБИЛЬНЫЙ РОБОТ И СПОСОБ КОРРЕКТИРОВКИ ЕГО КУРСА | 2001 |
|
RU2210492C2 |
| МОБИЛЬНЫЙ РОБОТ | 2004 |
|
RU2274543C1 |
| US 5219264 A, 15.06.1993 | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |

