Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству затвора и устройству захвата изображения, включающему в себя устройство затвора.
Предшествующий уровень техники
[0002] Патентный документ 1 раскрывает устройство затвора, в котором два лепестка затвора обеспечиваются для открытия или закрытия открытой части посредством шагового двигателя, вращающего приводное кольцо.
[0003] Устройство затвора, раскрытое в патентном документе 1, имеет область ускорения, в которой вращается приводное кольцо, однако два лепестка затвора не открывают и не закрывают открытую часть, и область экспонирования, в которой два лепестка затвора обеспечиваются для открытия или закрытия открытой части посредством вращения приводного кольца. В устройстве затвора, раскрытом в патентном документе 1, после ускорения шагового двигателя в области ускорения, два лепестка затвора открывают или закрывают открытую часть в области экспонирования.
Перечень патентных документов
[0004] Патентный документ 1: Патентная публикация Японии № 7-56211
Сущность изобретения
Техническая проблема
[0005] В устройстве затвора, раскрытом в патентном документе 1, в области экспонирования нагрузка для перемещения двух лепестков затвора может побудить шаговый двигатель к потере синхронизации.
[0006] То есть когда шаговый двигатель используется в качестве приводного источника возбуждения для шагового двигателя, если шаговый двигатель теряет синхронизацию из-за изменений в нагрузке в процессе привода, то он становится неспособным вращать приводное кольцо в тот момент, и в результате этого выполнение операции экспонирования становится невозможным.
[0007] Задача настоящего изобретения заключается в обеспечении устройства затвора, в котором в случае, когда шаговый двигатель приводит в движение ведомый элемент, за счет чего светоизолирующий элемент перемещается из закрытого состояния в открытое состояние или из открытого состояния в закрытое состояние, шаговый двигатель не теряет синхронизацию.
Решение проблемы
[0008] Устройство затвора, согласно аспекту настоящего изобретения, включает в себя шаговый двигатель, ведомый элемент и светоизолирующий элемент. Шаговый двигатель выполнен с возможностью приведения его в движение в режиме привода без обратной связи, в котором состояние энергоснабжения контура переключается через заданные интервалы времени, и в режиме привода с обратной связью, в котором состояние энергоснабжения контура переключается в соответствии с позицией вращения ротора. Ведомый элемент является выполненным с возможностью приведения в движение посредством шагового двигателя. Светоизолирующий элемент выполнен с возможностью перемещения в закрытое состояние, в котором апертурная диафрагма закрывается, и в открытое состояние, в котором апертурная диафрагма открывается, в соответствии с приводом ведомого элемента. Ведомый элемент выполнен с возможностью приведения его в движение в первой зоне, в которой ведомый элемент приводится в движение посредством шагового двигателя, но светоизолирующий элемент остается в закрытом состоянии или открытом состоянии, и во второй зоне, в которой ведомый элемент приводится в движение посредством шагового двигателя, и, таким образом, светоизолирующий элемент перемещается из закрытого состояния в открытое состояние или из открытого состояния в закрытое состояние. Ведомый элемент приводится в движение в первой зоне посредством шагового двигателя в одном направлении, и после приведения в движение ведомого элемента в первой зоне, ведомый элемент приводится в движение во второй зоне. В случае, когда ведомый элемент приводится в движение в первой зоне, шаговый двигатель приводит в движение ведомый элемент в режиме привода без обратной связи. В случае, когда ведомый элемент приводится в движение во второй зоне, шаговый двигатель приводит в движение ведомый элемент в режиме привода с обратной связью.
Полезные эффекты изобретения
[0009] Настоящее изобретение может обеспечить устройство затвора, в котором в случае, когда ведомый элемент приводится в движение посредством шагового двигателя, за счет чего светоизолирующий элемент перемещается из закрытого состояния в открытое состояние или из открытого состояния в закрытое состояние, шаговый двигатель не теряет синхронизацию.
Краткое описание чертежей
[0010] Фиг.1 включает в себя чертежи, предназначенные для описания блока 20 затвора в качестве затвора, согласно одному варианту осуществления настоящего изобретения.
Фиг.2 изображает чертеж первой роторной пластины 107 (второй роторной пластины 117), если смотреть со стороны задней поверхности.
Фиг.3 включает в себя чертежи, предназначенные для описания состояния блока 20 затвора в положении А.
Фиг.4 включает в себя чертежи, предназначенные для описания состояния блока 20 затвора в положении В.
Фиг.5 включает в себя чертежи, предназначенные для описания состояния блока 20 затвора в положении С.
Фиг.6 включает в себя чертежи, предназначенные для описания состояния блока 20 затвора в положении D.
Фиг.7 включает в себя чертежи, предназначенные для описания состояния блока 20 затвора в положении Е.
Фиг.8 включает в себя чертежи, предназначенные для описания состояния блока 20 затвора в положении F.
Фиг.9 включает в себя чертежи, предназначенные для описания состояния блока 20 затвора в положении G.
Фиг.10 включает в себя чертежи, предназначенные для описания состояния блока 20 затвора в положении H.
Фиг.11 включает в себя чертежи, предназначенные для описания состояния блока 20 затвора в положении I.
Фиг.12 изображает временную диаграмму, предназначенную для описания операций блока 20 затвора, когда камера 100 работает в режиме непрерывной съемки.
Фиг.13 изображает временную диаграмму, предназначенную для описания операций блока 20 затвора, когда камера 100 работает в режиме непрерывной съемки, в качестве разновидности варианта осуществления.
Фиг.14 демонстрирует двигатель 1, используемый как в качестве первого двигателя Ma, так и в качестве второго двигателя Mb.
Фиг.15 включает в себя чертежи, предназначенные для описания операций двигателя 1.
Фиг.16 включает в себя чертежи, предназначенные для описания позиций, в которых располагается первый магнитный датчик 8, второй магнитный датчик 9, третий магнитный датчик 10 и четвертый магнитный датчик 11.
Фиг.17 изображает основной вид в разрезе корпуса 100 цифровой однообъективной зеркальной камеры, в качестве устройства захвата изображения, согласно одному варианту осуществления настоящего изобретения, и сменного объектива 50.
Описание вариантов осуществления
[0011] Далее, со ссылкой на чертежи, будут подробно описаны варианты осуществления настоящего изобретения.
[0012] Фиг.17 изображает основной вид в разрезе корпуса 100 цифровой однообъективной зеркальной камеры (далее в настоящем документе будет называться камерой), согласно одному варианту осуществления настоящего изобретения, и сменного объектива 50, в качестве устройства захвата изображения.
[0013] Сменный объектив 50 закрепляется с возможностью отсоединения на камере 100 с использованием секции 210 крепления в камере 100 и секции 51 крепления в сменном объективе 50. Когда сменный объектив 50 присоединяется к камере 100, секция 220 контакта в камере 100 и секция 52 контакта в сменном объективе 50 электрически соединяются друг с другом.
[0014] Световой поток, который прошел через фокусирующие линзы 53 в сменном объективе 50, поступает на основное зеркало 130 в камере 100. Основное зеркало 130 удерживается на каркасе 131 крепления основного зеркала, а также поддерживается посредством секции 131а вращающегося вала таким образом, чтобы оно могло поворачиваться между верхней позицией зеркала и нижней позицией зеркала.
[0015] Основное зеркало 130 является полупрозрачным зеркалом. Световой поток, который прошел через основное зеркало 130, отражается вниз посредством вспомогательного зеркала 140 и направляется к блоку 150 обнаружения фокусировки.
[0016] Вспомогательное зеркало 140 удерживается на каркасе 141 крепления вспомогательного зеркала. Каркас 141 крепления вспомогательного зеркала поддерживается посредством шарнирного вала (не изображен) таким образом, чтобы оно могло поворачиваться относительно каркаса 131 крепления основного зеркала.
[0017] Блок 150 обнаружения фокусировки является выполненным с возможностью обнаружения величины расфокусировки фокусирующих линз 53, и вычисления величины привода фокусирующих линз 53 для достижения фокусировки для фокусирующих линз 53. Сменный объектив 50 является выполненным с возможностью приема вычисленной величины привода через секции 220 и 52 контакта. Сменный объектив 50 является выполненным с возможностью настройки фокусировки посредством управления двигателем (не изображен) и приведения в движение фокусирующих линз 53 на основе принятой величины привода.
[0018] Световой поток, отраженный посредством основного зеркала 130, направляется к оптическому видоискателю 160. Оптический видоискатель 160 включает в себя фокусирующую пластину 170, пентапризму 180 и окуляр 190. Световой поток, направленный к оптическому видоискателю 160, формирует изображение объекта на фокусирующей пластине 170. Пользователь может наблюдать изображение объекта на фокусирующей пластине 170 через пентапризму 180 и окуляр 190.
[0019] Блок 20 затвора располагается позади вспомогательного зеркала 140. Оптический низкочастотный фильтр 21, держатель 22 элемента захвата изображения, элемент 23 захвата изображения, покрывающий элемент 24 и резиновый элемент 25 располагаются позади блока 20 затвора. В процессе съемки световой поток, который прошел через оптический низкочастотный фильтр 21, поступает на элемент 23 захвата изображения. Держатель 22 элемента захвата изображения прикрепляется к корпусу камеры 100 при помощи винта (не изображен). Элемент 23 захвата изображения удерживается посредством держателя 22 элемента захвата изображения. Покрывающий элемент 24 защищает элемент 23 захвата изображения. Резиновый элемент 25 удерживает оптический низкочастотный фильтр 21 и герметично закрывает промежуток между оптическим низкочастотным фильтром 21 и элементом 23 захвата изображения.
[0020] Экранный монитор 26 может являться жидкокристаллическим экранным монитором, а также является выполненным с возможностью отображения фотографируемого изображения и отображения различных состояний настройки камеры 100.
[0021] Фиг.1 включает в себя чертежи, предназначенные для описания блока 20 затвора, в качестве затвора, согласно одному варианту осуществления настоящего изобретения. Фиг.1(a) изображает покомпонентный вид в перспективе, предназначенный для описания конфигурации блока 20 затвора. Фиг.1(b) изображает покомпонентный вид в перспективе, демонстрирующий блок 20 затвора, дополнительно разобранный из состояния, изображенного на Фиг.1(a).
[0022] Как изображено на Фиг.1(a), блок 20 затвора приводится в движение посредством первого двигателя Ma и второго двигателя Mb. Первый двигатель Ma соединяется с приводной схемой 14a. Второй двигатель Mb соединяется с приводной схемой 14b. Приводная схема 14a и приводная схема 14b соединяются со схемой 13 управления. В настоящем варианте осуществления первый двигатель Ma и второй двигатель Mb являются одинаковыми двигателями. Ведущая шестерня 101 напрессовывается на выводной вал первого двигателя Ma. Ведущая шестерня 111 напрессовывается на выводной вал второго двигателя Mb.
[0023] Первый двигатель Ma крепится к пластине 102 для крепления двигателя. Пластина 102 для крепления двигателя прикрепляется к покрывающей пластине 103. Второй двигатель Mb крепится к пластине 112 для крепления двигателя. Пластина 112 для крепления двигателя прикрепляется к покрывающей пластине 113.
[0024] Секция 104 вмещения механизма привода вмещает первую роторную пластину 107, на которой крепится грузик 106, и вторую роторную пластину 117, на которой крепится грузик 116. Первая роторная пластина 107 включает в себя выступающую секцию 107a. Когда покрывающая пластина 103 закрепляется на секции 104 вмещения механизма привода, выступающая секция 107a выставляется через покрывающую пластину 103. Вторая роторная пластина 117 включает в себя выступающую секцию 117a. Когда покрывающая пластина 113 закрепляется на секции 104 вмещения механизма привода, выступающая секция 117a выставляется через покрывающую пластину 113. Первая пружина 108 крепится к покрывающей пластине 103. Вторая пружина 118 крепится к покрывающей пластине 113.
[0025] Первая роторная пластина 107 включает в себя зубчатую секцию 107b. Когда пластина 102 для крепления двигателя закрепляется на покрывающей пластине 103, ведущая шестерня 101 и зубчатая секция 107b входят в зацепление друг с другом. Вторая роторная пластина 117 включает в себя зубчатую секцию 117b. Когда пластина 112 для крепления двигателя закрепляется на покрывающей пластине 113, ведущая шестерня 111 и зубчатая секция 117b входят в зацепление друг с другом.
[0026] Соответственно, когда первый двигатель Ma приводится в движение, вращается первая роторная пластина 107; когда второй двигатель Mb приводится в движение, вращается вторая роторная пластина 117.
[0027] Секция 105 вмещения лепестка имеет апертурную диафрагму 105a. Секция 105 вмещения лепестка вмещает первый лепесток 110 и второй лепесток 120.
[0028] Как изображено на Фиг.1(b), приводное плечо 110a крепится к первому лепестку 110. Приводное плечо 120a крепится ко второму лепестку 120.
[0029] Первый приводной рычаг 109 и второй приводной рычаг 119 поддерживаются на секции 104 вмещения механизма привода. Первый приводной рычаг 109 включает в себя штырек 109a эксцентрика и штырек 109b зацепления. Штырек 109a эксцентрика входит в зацепление с канавкой 107c эксцентрика в первой роторной пластине 107. Штырек 109b зацепления входит в зацепление с приводным плечом 110a. Когда первый приводной рычаг 109 поворачивается, первый лепесток 110 открывает или закрывает апертурную диафрагму 105a. Подобным образом, второй приводной рычаг 119 включает в себя штырек 119a эксцентрика и штырек 119b зацепления. Штырек 119a эксцентрика входит в зацепление с канавкой 117c эксцентрика во второй роторной пластине 117. Штырек 119b зацепления входит в зацепление с приводным плечом 120a. Когда второй приводной рычаг 119 поворачивается, второй лепесток 120 открывает или закрывает апертурную диафрагму 105a. В настоящем варианте осуществления первый приводной рычаг 109 и второй приводной рычаг 119 являются одинаковыми компонентами.
[0030] Секция 104 вмещения механизма привода включает в себя секцию 104a вала и секцию 104b вала. Первая роторная пластина 107 поддерживается посредством секции 104a вала. Вторая роторная пластина 117 поддерживается посредством секции 104b вала. Первая роторная пластина 107 включает в себя зубчатую секцию 107b на собственной передней поверхности. Грузик 106 крепится к периферийной кольцеобразной секции первой роторной пластины 107. Первая роторная пластина 107 включает в себя канавку 107c эксцентрика, с которой входит в зацепление штырек 109a эксцентрика, на собственной задней поверхности.
[0031] Подобным образом, вторая роторная пластина 117 включает в себя зубчатую секцию 117b на собственной передней поверхности. Грузик 116 крепится к периферийной кольцеобразной секции второй роторной пластины 117. Вторая роторная пластина 117 включает в себя канавку 117c эксцентрика, с которой входит в зацепление штырек 119a эксцентрика, на собственной задней поверхности. В настоящем варианте осуществления первая роторная пластина 107 и вторая роторная пластина 117 являются одинаковыми компонентами. Грузик 106 и грузик 116 являются одинаковыми компонентами.
[0032] Как первая роторная пластина 107, так и вторая роторная пластина 117 функционируют в качестве ведомого элемента. Первый лепесток 110 и первый приводной рычаг 109 функционируют в качестве светоизолирующего элемента, способного перемещаться между закрытым состоянием, в котором они закрывают апертурную диафрагму 105a, и открытым состоянием, в котором они открывают апертурную диафрагму 105a, в соответствии с приводом первой роторной пластины 107. Второй лепесток 120 и второй приводной рычаг 119 функционируют в качестве светоизолирующего элемента, способного перемещаться между закрытым состоянием, в котором они закрывают апертурную диафрагму 105a, и открытым состоянием, в котором они открывают апертурную диафрагму 105a, в соответствии с приводом второй роторной пластины 117. Как первая пружина 108, так и вторая пружина 118 функционируют в качестве принуждающего элемента.
[0033] Фиг.2 изображает чертеж первой роторной пластины 107 (второй роторной пластины 117), если смотреть со стороны задней поверхности. Канавка 107c эксцентрика (канавка 117c эксцентрика), с который входит в зацепление штырек 109a эксцентрика (штырек 119a эксцентрика), располагается в задней поверхности первой роторной пластины 107 (второй роторной пластины 117). Как изображено на Фиг.2, первая область А холостого привода, область В привода экспонирования и вторая область С холостого привода обеспечиваются в канавке 107c эксцентрика (канавке 117c эксцентрика). В первой области А холостого привода и второй области С холостого привода в канавке 107c эксцентрика (канавке 117c эксцентрика) шаг эксцентрика является практически нулевым.
[0034] Когда штырек 109a эксцентрика (штырек 119a эксцентрика) проходит по первой области А холостого привода или второй области С холостого привода, первый приводной рычаг 109 (второй приводной рычаг 119) не вращается, при этом первый лепесток 110 (второй лепесток 120) остается в закрытом состоянии или открытом состоянии.
[0035] Когда штырек 109a эксцентрика (штырек 119a эксцентрика) проходит по области В привода экспонирования, первый приводной рычаг 109 (второй приводной рычаг 119) вращается, при этом первый лепесток 110 (второй лепесток 120) перемещается из закрытого состояния в открытое состояние или из открытого состояния в закрытое состояние.
[0036] Когда первая роторная пластина 107 (вторая роторная пластина 117) вращается по направлению движения часовой стрелки, штырек 109a эксцентрика (штырек 119a эксцентрика) проходит по первой области А холостого привода, области В привода экспонирования и второй области С холостого привода в указанном порядке.
[0037] Ниже будет представлено подробное описание вращения первой роторной пластины 107 (второй роторной пластины 117) по направлению движения часовой стрелки.
[0038] Первая область А холостого привода является первой областью эксцентрика. Зона, в которой штырек 109a эксцентрика (штырек 119a эксцентрика) проходит по первой области А холостого привода, является первой зоной.
[0039] Область В привода экспонирования является второй областью эксцентрика. Зона, в которой штырек 109a эксцентрика (штырек 119a эксцентрика) проходит по области В привода экспонирования, является второй зоной.
[0040] Вторая область С холостого привода является третьей областью эксцентрика. Зона, в которой штырек 109a эксцентрика (штырек 119a эксцентрика) проходит по второй области С холостого привода, является третьей зоной.
[0041] Для сравнения, когда первая роторная пластина 107 (вторая роторная пластина 117) вращается против направления движения часовой стрелки, штырек 109a эксцентрика (штырек 119a эксцентрика) проходит по второй области С холостого привода, области В привода экспонирования и первой области А холостого привода в указанном порядке.
[0042] Ниже будет представлено подробное описание вращения первой роторной пластины 107 (второй роторной пластины 117) против направления движения часовой стрелки.
[0043] Вторая область С холостого привода является первой областью эксцентрика. Зона, в которой штырек 109a эксцентрика (штырек 119a эксцентрика) проходит по второй области С холостого привода, является первой зоной.
[0044] Область В привода экспонирования является второй областью эксцентрика. Зона, в которой штырек 109a эксцентрика (штырек 119a эксцентрика) проходит по области В привода экспонирования, является второй зоной.
[0045] Первая область А холостого привода является третьей областью эксцентрика. Зона, в которой штырек 109a эксцентрика (штырек 119a эксцентрика) проходит по первой области А холостого привода, является третьей зоной.
[0046] То есть первая роторная пластина 107 (вторая роторная пластина 117) приводится в движение в одном направлении, за счет чего первая роторная пластина 107 (вторая роторная пластина 117) приводится в движение в первой зоне. После приведения в движение первой роторной пластины 107 (второй роторной пластины 117) в первой зоне, первая роторная пластина 107 (вторая роторная пластина 117) приводится в движение во второй зоне.
[0047] Как изображено на Фиг.1(b), покрывающая пластина 103 снабжается полой секцией 103a вала. Когда покрывающая пластина 103 закрепляется на секции 104 вмещения механизма привода, выступающая секция 107a в первой роторной пластине 107 выставляется через покрывающую пластину 103, при этом секция 104a вала вставляется во внутреннюю секцию полой секции 103a вала. Первая пружина 108 закрепляется на наружной секции полой секции 103a вала.
[0048] Подобным образом, покрывающая пластина 113 снабжается полой секцией 113a вала. Когда покрывающая пластина 113 закрепляется на секции 104 вмещения механизма привода, выступающая секция 117a во второй роторной пластине 117 выставляется через покрывающую пластину 113, при этом секция 104b вала вставляется во внутреннюю секцию полой секции 113a вала. Вторая пружина 118 закрепляется на наружной секции полой секции 113a вала.
[0049] Когда пластина 102 для крепления двигателя с закрепленным на ней первым двигателем Ma закрепляется на покрывающей пластине 103, выводной вал первого двигателя Ma проникает в отверстие в покрывающей пластине 103, при этом ведущая шестерня 101 и зубчатая секция 107b входят в зацепление друг с другом. Подобным образом, когда пластина 112 для крепления двигателя с закрепленным на ней вторым двигателем Mb закрепляется на покрывающей пластине 113, выводной вал второго двигателя Mb проникает в отверстие в покрывающей пластине 113, при этом ведущая шестерня 111 и зубчатая секция 117b входят в зацепление друг с другом.
[0050] В настоящем варианте осуществления первый двигатель Ma, первая роторная пластина 107, первая пружина 108, первый приводной рычаг 109 и первый лепесток 110 формируют первый механизм привода затвора. Второй двигатель Mb, вторая роторная пластина 117, вторая пружина 118, второй приводной рычаг 119 и второй лепесток 120 формируют второй механизм привода затвора.
[0051] Как первый двигатель Ma, так и второй двигатель Mb являются шаговым двигателем, который может быть приведен в движение в режиме шагового привода (режиме привода без обратной связи), в котором состояние энергоснабжения контура переключается через заданные интервалы времени, и двух режимах привода с обратной связью с различными величинами угла опережения. Для приведения в движение первого двигателя Ma и второго двигателя Mb в режиме шагового привода (режиме привода без обратной связи), состояние энергоснабжения контура переключается через заданные интервалы времени. Для приведения в движение первого двигателя Ma и второго двигателя Mb в режиме привода с обратной связью, состояние энергоснабжения контура переключается в соответствии с выходным сигналом позиционного датчика.
[0052] Ниже будет описана подробная конфигурация как первого двигателя Ma, так и второго двигателя Mb.
[0053] Фиг.12 изображает временную диаграмму, предназначенную для описания операций блока 20 затвора, когда камера 100 работает в режиме непрерывной съемки. Фиг.3-11 изображают чертежи, предназначенные для описания состояний блока 20 затвора в положениях А-I, изображенных на Фиг.12.
[0054] Блок 20 затвора, согласно настоящему варианту осуществления, выполняет операцию съемки первого кадра от положения А до положения H, изображенных на Фиг.12. В процессе операции съемки первого кадра первый механизм привода затвора функционирует в качестве начального лепестка, а второй механизм привода затвора функционирует в качестве конечного лепестка. Блок 20 затвора, согласно настоящему варианту осуществления, выполняет операцию съемки второго кадра от положения H до положения I, изображенных на Фиг.12. В процессе операции съемки второго кадра второй механизм привода затвора функционирует в качестве начального лепестка, а второй механизм привода затвора функционирует в качестве конечного лепестка. В процессе операции съемки третьего кадра первый механизм привода затвора функционирует в качестве начального лепестка, а второй механизм привода затвора функционирует в качестве конечного лепестка.
[0055] Когда камера 100 начинает операцию съемки, она находится в положении А, изображенном на Фиг.12. Фиг.3 включает в себя чертежи, предназначенные для описания состояния блока 20 затвора в положении А. Фиг.3(a) изображает чертеж, предназначенный для описания состояния первого механизма привода затвора. Фиг.3(b) изображает чертеж, предназначенный для описания состояния второго механизма привода затвора.
[0056] Как изображено на Фиг.3(a), в положении А первый лепесток 110 закрывает апертурную диафрагму 105a. В состоянии, изображенном на Фиг.3(a), выступающая секция 107a в первой роторной пластине 107 находится в контакте с секцией левого плеча первой пружины 108. Однако в этом состоянии первая пружина 108 не нагружается, и она находится в своем естественном состоянии.
[0057] Как изображено на Фиг.3(b), в положении А второй лепесток 120 открывает апертурную диафрагму 105a. На данном этапе выступающая секция 117a во второй роторной пластине 117 находится в контакте с секцией правого плеча второй пружины 118. Однако в этом состоянии вторая пружина 118 не нагружается, и она находится в своем естественном состоянии.
[0058] Как изображено на Фиг.12, в положении А схема 13 управления управляет приводной схемой 14a таким образом, чтобы первый двигатель Ma приводился в движение по направлению движения часовой стрелки в режиме привода с обратной связью с малым углом опережения. В положении А схема 13 управления управляет приводной схемой 14b таким образом, чтобы второй двигатель Mb не приводился в движение в любом направлении. Соответственно, блок 20 затвора перемещается в положение В, изображенное на Фиг.12.
[0059] Фиг.4 включает в себя чертежи, предназначенные для описания состояния блока 20 затвора в положении В. Фиг.4(a) изображает чертеж, предназначенный для описания состояния первого механизма привода затвора. Фиг.4(b) изображает чертеж, предназначенный для описания состояния второго механизма привода затвора.
[0060] Как изображено на Фиг.4(a), в положении В первый лепесток 110 закрывает апертурную диафрагму 105a. Как изображено на Фиг.12, в период от положения А до положения В, первый двигатель Ma приводится в движение по направлению движения часовой стрелки в режиме привода с обратной связью с малым углом опережения. Соответственно, первая роторная пластина 107 вращается против направления движения часовой стрелки из состояния, изображенного на Фиг.3(a). В данном случае, поскольку ведущая шестерня 101 в первом двигателе Ma и зубчатая секция 107b в первой роторной пластине 107 входят в зацепление друг с другом, направление вращения первого двигателя Ma и направление вращения первой роторной пластины 107 являются противоположными.
[0061] Когда первая роторная пластина 107 вращается против направления движения часовой стрелки из состояния, изображенного на Фиг.3(a) (положения А), первая роторная пластина 107 вращается, наряду с нагрузкой первой пружины 108. В этот период первая роторная пластина 107 вращается против направления движения часовой стрелки, наряду с нагрузкой первой пружины 108, за счет чего изменения в нагрузке в процессе привода первого двигателя Ma являются большими. Однако, поскольку первый двигатель Ma приводится в движение в режиме привода с обратной связью с малым углом опережения, первый двигатель Ma не теряет синхронизацию.
[0062] В состоянии, изображенном на Фиг.4(a) (положении В), поскольку первая пружина 108 нагружается, первая роторная пластина 107 принуждается посредством первой пружины 108 по направлению движения часовой стрелки.
[0063] Когда первая роторная пластина 107 вращается против направления движения часовой стрелки из состояния, изображенного на Фиг.3(a) (положения А), в этот период штырек 109a эксцентрика в первом приводном рычаге 109 проходит по первой области А холостого привода в канавке 107c эксцентрика. Соответственно, позиция первого приводного рычага 109 в состоянии, изображенном на Фиг.4(a) (положении В), является практически подобной позиции первого приводного рычага 109 в состоянии, изображенном на Фиг.3(a) (положении А).
[0064] Положение В второго механизма привода затвора, изображенное на Фиг.4(b), является подобным положению А второго механизма привода затвора, изображенному на Фиг.3(b). Когда состояние перемещается из положения А в положение В, второй двигатель Mb не приводится в движение, за счет чего вторая роторная пластина 117 не меняет состояния, изображенного на Фиг.3(b) (положения А).
[0065] Как изображено на Фиг.12, в положении В схема 13 управления управляет приводной схемой 14a таким образом, чтобы первый двигатель Ma приводился в движение против направления движения часовой стрелки в режиме шагового привода. В положении В схема 13 управления управляет приводной схемой 14b таким образом, чтобы второй двигатель Mb приводился в движение по направлению движения часовой стрелки в режиме привода с обратной связью с малым углом опережения. Соответственно, блок 20 затвора перемещается в положение С, изображенное на Фиг.12. То есть в настоящем варианте осуществления начало привода для разгона во втором механизме привода затвора отстает от начала привода для разгона в первом механизме привода затвора на время t1 экспонирования.
[0066] Первый механизм привода затвора начинает движение для разгона в режиме шагового привода в положении В. В процессе привода для разгона схема 13 управления плавно увеличивает скорость вращения первого двигателя Ma посредством плавного уменьшения длительности (ширины) приводного импульса. В процессе привода для разгона штырек 109a эксцентрика проходит по первой области А холостого привода в канавке 107c эксцентрика, в которой шаг эксцентрика является практически нулевым. Соответственно, в этот период, поскольку первый приводной рычаг 109 фактически не вращается, даже в том случае, когда первая роторная пластина 107 приводится в движение, изменения в нагрузке в процессе привода первого двигателя Ma являются малыми. Соответственно, когда первый двигатель Ma приводится в движение в режиме шагового привода, первый двигатель Ma не теряет синхронизацию.
[0067] Фиг.5 включает в себя чертежи, предназначенные для описания состояния блока 20 затвора в положении С. Фиг.5(a) изображает чертеж, предназначенный для описания состояния первого механизма привода затвора. Фиг.5(b) изображает чертеж, предназначенный для описания состояния второго механизма привода затвора.
[0068] Как изображено на Фиг.5(a), в положении С первый лепесток 110 закрывает апертурную диафрагму 105a. Поскольку первый двигатель Ma приводится в движение против направления движения часовой стрелки в период от положения В до положения С, первая роторная пластина 107 вращается по направлению движения часовой стрелки посредством движущей силы первого двигателя Ma в комбинации с принуждающей силой первой пружины 108. Принуждающая сила первой пружины 108 прикладывается к первой роторной пластине 107 вплоть до положения С, изображенного на Фиг.5(a).
[0069] Когда первая роторная пластина 107 вращается по направлению движения часовой стрелки из состояния, изображенного на Фиг.4(a) (положения В), в этот период штырек 109a эксцентрика в первом приводном рычаге 109 проходит по первой области А холостого привода в канавке 107c эксцентрика. Соответственно, позиция первого приводного рычага 109 в состоянии, изображенном на Фиг.5(a) (положении С), является практически подобной позиции первого приводного рычага 109 в состоянии, изображенном на Фиг.4(a) (положении В).
[0070] Как изображено на Фиг.5(b), в положении С второй лепесток 120 открывает апертурную диафрагму 105a. В период от положения В до положения С, поскольку второй двигатель Mb приводится в движение по направлению движения часовой стрелки в режиме привода с обратной связью с малым углом опережения, вторая роторная пластина 117 вращается против направления движения часовой стрелки из состояния, изображенного на Фиг.4(b). В данном случае, поскольку ведущая шестерня 111 во втором двигателе Mb и зубчатая секция 117b во второй роторной пластине 117 входят в зацепление друг с другом, направление вращения второго двигателя Mb и направление вращения второй роторной пластины 117 являются противоположными.
[0071] Когда вторая роторная пластина 117 вращается по направлению движения часовой стрелки из состояния, изображенного на Фиг.4(b) (положения В), вторая роторная пластина 117 вращается, наряду с нагрузкой второй пружины 118. В этот период вторая роторная пластина 117 вращается по направлению движения часовой стрелки, наряду с нагрузкой второй пружины 118, за счет чего изменения в нагрузке в процессе привода второго двигателя Mb являются большими. Однако, поскольку второй двигатель Mb приводится в движение в режиме привода с обратной связью с малым углом опережения, второй двигатель Mb не теряет синхронизацию.
[0072] В состоянии, изображенном на Фиг.5(b) (положении С), поскольку вторая пружина 118 нагружается, вторая роторная пластина 117 принуждается посредством второй пружины 118 по направлению движения часовой стрелки.
[0073] Когда вторая роторная пластина 117 вращается по направлению движения часовой стрелки из состояния, изображенного на Фиг.4(b) (положения В), в этот период штырек 119a эксцентрика во втором приводном рычаге 119 также проходит по первой области А холостого привода в канавке 117c эксцентрика. Соответственно, позиция второго приводного рычага 119 в состоянии, изображенном на Фиг.5(b) (положении С), является практически подобной позиции второго приводного рычага 119 в состоянии, изображенном на Фиг.4(b) (положении В).
[0074] Как изображено на Фиг.12, в положении С схема 13 управления также управляет приводной схемой 14a таким образом, чтобы первый двигатель Ma приводился в движение против направления движения часовой стрелки в режиме шагового привода. В положении С схема 13 управления управляет приводной схемой 14b таким образом, чтобы второй двигатель Mb приводился в движение против направления движения часовой стрелки в режиме шагового привода. Соответственно, блок 20 затвора перемещается в положение D, изображенное на Фиг.12. Второй механизм привода затвора начинает движение для разгона в режиме шагового привода в положении С. В процессе привода для разгона схема 13 управления плавно увеличивает скорость вращения второго двигателя Mb посредством плавного уменьшения длительности (ширины) приводного импульса. В процессе привода для разгона штырек 119a эксцентрика проходит по первой области А холостого привода в канавке 117c эксцентрика, в которой шаг эксцентрика является практически нулевым. Соответственно, когда второй двигатель Mb приводится в движение в режиме шагового привода, второй двигатель Mb не теряет синхронизацию.
[0075] Фиг.6 включает в себя чертежи, предназначенные для описания состояния блока 20 затвора в положении D. Фиг.6(a) изображает чертеж, предназначенный для описания состояния первого механизма привода затвора. Фиг.6(b) изображает чертеж, предназначенный для описания состояния второго механизма привода затвора.
[0076] Как изображено на Фиг.6(a), положение D является состоянием непосредственно перед тем, как первый лепесток 110 начинает открывать апертурную диафрагму 105a. Поскольку первый двигатель Ma приводится в движение против направления движения часовой стрелки в период от положения С до положения D, первая роторная пластина 107 вращается по направлению движения часовой стрелки посредством движущей силы первого двигателя Ma.
[0077] Когда первая роторная пластина 107 вращается по направлению движения часовой стрелки из состояния, изображенного на Фиг.5(a) (положения С), в этот период штырек 109a эксцентрика в первом приводном рычаге 109 проходит по первой области А холостого привода в канавке 107c эксцентрика. Соответственно, позиция первого приводного рычага 109 в состоянии, изображенном на Фиг.6(a) (положении D), является практически подобной позиции первого приводного рычага 109 в состоянии, изображенном на Фиг.5(a) (положении С).
[0078] Как изображено на Фиг.6(b), в положении D второй лепесток 120 открывает апертурную диафрагму 105a. В период от положения С до состояния перед положением D, поскольку второй двигатель Mb приводится в движение против направления движения часовой стрелки, вторая роторная пластина 117 вращается по направлению движения часовой стрелки посредством движущей силы второго двигателя Mb в комбинации с принуждающей силой второй пружины 118. Принуждающая сила второй пружины 118 прикладывается ко второй роторной пластине 117 вплоть до состояния перед положением D, изображенным на Фиг.6(b). То есть в положении D, изображенном на Фиг.6(b), принуждающая сила второй пружины 118 не прикладывается ко второй роторной пластине 117, при этом вторая роторная пластина 117 вращается по направлению движения часовой стрелки только посредством движущей силы второго двигателя Mb.
[0079] Когда вторая роторная пластина 117 вращается по направлению движения часовой стрелки из состояния, изображенного на Фиг.5(b) (положения С), в этот период штырек 119a эксцентрика во втором приводном рычаге 119 также проходит по первой области А холостого привода в канавке 117c эксцентрика. Соответственно, позиция второго приводного рычага 119 в состоянии, изображенном на Фиг.6(b) (положении D), является практически подобной позиции второго приводного рычага 119 в состоянии, изображенном на Фиг.5(b) (положении С).
[0080] Как изображено на Фиг.12, в положении D схема 13 управления управляет приводной схемой 14a таким образом, чтобы первый двигатель Ma приводился в движение против направления движения часовой стрелки в режиме привода с обратной связью с большим углом опережения. В положении D схема 13 управления также управляет приводной схемой 14b таким образом, чтобы второй двигатель Mb приводился в движение против направления движения часовой стрелки в режиме шагового привода. Соответственно, блок 20 затвора перемещается в положение Е, изображенное на Фиг.12. Первый механизм привода затвора начинает движение для экспонирования в режиме привода с обратной связью с большим углом опережения в положении D.
[0081] Фиг.7 включает в себя чертежи, предназначенные для описания состояния блока 20 затвора в положении Е. Фиг.7(a) изображает чертеж, предназначенный для описания состояния первого механизма привода затвора. Фиг.7(b) изображает чертеж, предназначенный для описания состояния второго механизма привода затвора.
[0082] Как изображено на Фиг.7(a), в положении Е первый лепесток 110 открывает апертурную диафрагму 105a. Поскольку первый двигатель Ma приводится в движение против направления движения часовой стрелки в период от положения D до положения Е, первая роторная пластина 107 вращается по направлению движения часовой стрелки посредством движущей силы первого двигателя Ma.
[0083] Когда первая роторная пластина 107 вращается по направлению движения часовой стрелки из состояния, изображенного на Фиг.6(a) (положения D), в этот период штырек 109a эксцентрика в первом приводном рычаге 109 проходит по области В привода экспонирования в канавке 107c эксцентрика. В результате чего, первый лепесток 110 открывает закрытую апертурную диафрагму 105a. Соответственно, в процессе привода экспонирования необходимо, чтобы первый двигатель Ma приводился в движение на высоких скоростях, в результате чего в процессе привода первого двигателя Ma возникают большие изменения в нагрузке. На данном этапе, поскольку первый двигатель Ma приводится в движение в режиме привода с обратной связью с большим углом опережения, высокоскоростной привод и изменения нагрузки не побуждают первый двигатель Ma к потере синхронизации. Поскольку скорость вращения первого двигателя Ma является достаточно большой, вследствие привода для разгона, первый двигатель Ma может быть приведен в движение в режиме привода с обратной связью с большим углом опережения.
[0084] Как изображено на Фиг.7(b), положение Е является состоянием непосредственно перед тем, как второй лепесток 120 начинает закрывать апертурную диафрагму 105a. В период от положения D до положения Е, поскольку второй двигатель Mb приводится в движение против направления движения часовой стрелки, вторая роторная пластина 117 вращается по направлению движения часовой стрелки посредством движущей силы второго двигателя Mb.
[0085] Когда вторая роторная пластина 117 вращается по направлению движения часовой стрелки из состояния, изображенного на Фиг.6(b) (положения D), в этот период штырек 119a эксцентрика во втором приводном рычаге 119 проходит по первой области А холостого привода в канавке 117c эксцентрика. Соответственно, позиция второго приводного рычага 119 в состоянии, изображенном на Фиг.7(b) (положении Е), является практически подобной позиции второго приводного рычага 119 в состоянии, изображенном на Фиг.6(b) (положении D).
[0086] Как изображено на Фиг.12, в положении Е схема 13 управления управляет приводной схемой 14a таким образом, чтобы первый двигатель Ma приводился в движение против направления движения часовой стрелки в режиме привода с обратной связью с большим углом опережения. В положении Е схема 13 управления также управляет приводной схемой 14b таким образом, чтобы второй двигатель Mb приводился в движение против направления движения часовой стрелки в режиме привода с обратной связью с большим углом опережения. Соответственно, блок 20 затвора перемещается в положение F, изображенное на Фиг.12. Второй механизм привода затвора начинает движение для экспонирования в режиме привода с обратной связью с большим углом опережения в положении Е.
[0087] Фиг.8 включает в себя чертежи, предназначенные для описания состояния блока 20 затвора в положении F. Фиг.8(a) изображает чертеж, предназначенный для описания состояния первого механизма привода затвора. Фиг.8(b) изображает чертеж, предназначенный для описания состояния второго механизма привода затвора.
[0088] Как изображено на Фиг.8(a), в положении F первый лепесток 110 открывает апертурную диафрагму 105a. Поскольку первый двигатель Ma приводится в движение против направления движения часовой стрелки в период от положения D до положения Е, первая роторная пластина 107 вращается по направлению движения часовой стрелки посредством движущей силы первого двигателя Ma.
[0089] Когда первая роторная пластина 107 вращается по направлению движения часовой стрелки из состояния, изображенного на Фиг.7(a) (положения Е), в этот период штырек 109a эксцентрика в первом приводном рычаге 109 проходит по второй области С холостого привода в канавке 107c эксцентрика. Соответственно, позиция первого приводного рычага 109 в состоянии, изображенном на Фиг.8(a) (положении F), является практически подобной позиции первого приводного рычага 109 в состоянии, изображенном на Фиг.7(a) (положении Е).
[0090] Как изображено на Фиг.8(b), в положении F второй лепесток 120 закрывает апертурную диафрагму 105a. В период от положения Е до положения F, поскольку второй двигатель Mb приводится в движение против направления движения часовой стрелки, вторая роторная пластина 117 вращается по направлению движения часовой стрелки посредством движущей силы второго двигателя Mb.
[0091] Когда вторая роторная пластина 117 вращается по направлению движения часовой стрелки из состояния, изображенного на Фиг.7(b) (положения Е), в этот период штырек 119a эксцентрика во втором приводном рычаге 119 проходит по области В привода экспонирования в канавке 117c эксцентрика. В результате чего, второй лепесток 120 закрывает открытую апертурную диафрагму 105a. Соответственно, в процессе привода экспонирования необходимо, чтобы второй двигатель Mb приводился в движение на высоких скоростях, в результате чего в процессе привода второго двигателя Mb возникают большие изменения в нагрузке. На данном этапе, поскольку второй двигатель Mb приводится в движение в режиме привода с обратной связью с большим углом опережения, высокоскоростной привод и изменения нагрузки не побуждают второй двигатель Mb к потере синхронизации. Поскольку скорость вращения второго двигателя Mb является достаточно большой, вследствие привода для разгона, второй двигатель Mb может быть приведен в движение в режиме привода с обратной связью с большим углом опережения.
[0092] Как изображено на Фиг.12, в положении F схема 13 управления управляет приводной схемой 14a таким образом, чтобы первый двигатель Ma приводился в движение против направления движения часовой стрелки в режиме привода с обратной связью с большим углом опережения. В положении F схема 13 управления также управляет приводной схемой 14b таким образом, чтобы второй двигатель Mb приводился в движение против направления движения часовой стрелки в режиме привода с обратной связью с большим углом опережения. Соответственно, блок 20 затвора перемещается в положение G, изображенное на Фиг.12.
[0093] Фиг.9 включает в себя чертежи, предназначенные для описания состояния блока 20 затвора в положении G. Фиг.9(a) изображает чертеж, предназначенный для описания состояния первого механизма привода затвора. Фиг.9(b) изображает чертеж, предназначенный для описания состояния второго механизма привода затвора.
[0094] Как изображено на Фиг.9(a), в положении G первый лепесток 110 открывает апертурную диафрагму 105a. Первый двигатель Ma приводится в движение против направления движения часовой стрелки в период от положения F до положения G. В период от положения F до положения G выступающая секция 107a в первой роторной пластине 107 находится в контакте с секцией правого плеча первой пружины 108, при этом первая роторная пластина 107 вращается по направлению движения часовой стрелки, наряду с нагрузкой первой пружины 108. То есть первая пружина 108 функционирует для применения торможения к вращению первой роторной пластины 107 по направлению движения часовой стрелки. В состоянии, изображенном на Фиг.9(a), первая пружина 108 нагружается, при этом первая роторная пластина 107 принуждается посредством первой пружины 108 против направления движения часовой стрелки.
[0095] Когда первая роторная пластина 107 вращается по направлению движения часовой стрелки из состояния, изображенного на Фиг.8(a) (положения F), в этот период штырек 109a эксцентрика в первом приводном рычаге 109 проходит по второй области С холостого привода в канавке 107c эксцентрика. Соответственно, позиция первого приводного рычага 109 в состоянии, изображенном на Фиг.9(a) (положении G), является практически подобной позиции первого приводного рычага 109 в состоянии, изображенном на Фиг.8(a) (положении F). В этот период первая роторная пластина 107 вращается по направлению движения часовой стрелки, наряду с нагрузкой первой пружины 108, за счет чего изменения в нагрузке в процессе привода первого двигателя Ma являются большими. Однако, поскольку первый двигатель Ma приводится в движение в режиме привода с обратной связью с большим углом опережения, первый двигатель Ma не теряет синхронизацию.
[0096] Как изображено на Фиг.9(b), в положении G второй лепесток 120 закрывает апертурную диафрагму 105a. В период от положения F до положения G, поскольку второй двигатель Mb приводится в движение против направления движения часовой стрелки, вторая роторная пластина 117 вращается по направлению движения часовой стрелки посредством движущей силы второго двигателя Mb. В состоянии, изображенном на Фиг.9(b), выступающая секция 117a во второй роторной пластине 117 находится в контакте с секцией левого плеча второй пружины 118. Однако в этом состоянии вторая пружина 118 не нагружается, и она находится в своем естественном состоянии.
[0097] Когда вторая роторная пластина 117 вращается по направлению движения часовой стрелки из состояния, изображенного на Фиг.8(b) (положения F), в этот период штырек 119a эксцентрика во втором приводном рычаге 119 также проходит по второй области С холостого привода в канавке 117c эксцентрика. Соответственно, позиция второго приводного рычага 119 в состоянии, изображенном на Фиг.9(b) (положении G), является практически подобной позиции второго приводного рычага 119 в состоянии, изображенном на Фиг.8(b) (положении F).
[0098] Как изображено на Фиг.12, в положении G схема 13 управления управляет приводной схемой 14a таким образом, чтобы поддерживалось электроснабжение для первого двигателя Ma. В данном случае поддержка электроснабжения указывает поддержку фазы электроснабжения для контура первого двигателя Ma в положении G. В положении G схема 13 управления также управляет приводной схемой 14b таким образом, чтобы второй двигатель Mb приводился в движение против направления движения часовой стрелки в режиме привода с обратной связью с большим углом опережения. Соответственно, блок 20 затвора перемещается в положение H, изображенное на Фиг.12.
[0099] Фиг.10 включает в себя чертежи, предназначенные для описания состояния блока 20 затвора в положении H. Фиг.10(a) изображает чертеж, предназначенный для описания состояния первого механизма привода затвора. Фиг.10(b) изображает чертеж, предназначенный для описания состояния второго механизма привода затвора.
[0100] Как изображено на Фиг.10(a), в положении H первый лепесток 110 открывает апертурную диафрагму 105a. Поскольку в положении G поддерживается электроснабжение для первого двигателя Ma, первый двигатель Ma и первая роторная пластина 107 остаются в положении G. То есть состояние, изображенное на Фиг.10(a) (положение H), является подобным состоянию, изображенному на Фиг.9(a) (положению G).
[0101] Как изображено на Фиг.10(b), в положении H второй лепесток 120 закрывает апертурную диафрагму 105a. В период от положения G до положения H второй двигатель Mb приводится в движение против направления движения часовой стрелки. В период от положения G до положения H выступающая секция 117a во второй роторной пластине 117 находится в контакте с секцией левого плеча второй пружины 118, при этом вторая роторная пластина 117 вращается по направлению движения часовой стрелки, наряду с нагрузкой второй пружины 118. То есть вторая пружина 118 функционирует для применения торможения к вращению второй роторной пластины 117 по направлению движения часовой стрелки. В состоянии, изображенном на Фиг.10(b), вторая пружина 118 нагружается, при этом вторая роторная пластина 117 принуждается посредством второй пружины 118 против направления движения часовой стрелки.
[0102] Когда вторая роторная пластина 117 вращается по направлению движения часовой стрелки из состояния, изображенного на Фиг.9(b) (положения G), в этот период штырек 119a эксцентрика во втором приводном рычаге 119 проходит по второй области С холостого привода в канавке 117c эксцентрика. Соответственно, позиция второго приводного рычага 119 в состоянии, изображенном на Фиг.10(b) (положении H), является практически подобной позиции второго приводного рычага 119 в состоянии, изображенном на Фиг.9(b) (положении G). В этот период вторая роторная пластина 117 вращается по направлению движения часовой стрелки, наряду с нагрузкой второй пружины 118, за счет чего изменения в нагрузке в процессе привода второго двигателя Mb являются большими. Однако, поскольку второй двигатель Mb приводится в движение в режиме привода с обратной связью с большим углом опережения, второй двигатель Mb не теряет синхронизацию.
[0103] Как было описано выше, блок 20 затвора, согласно настоящему варианту осуществления, выполняет операцию съемки первого кадра от положения А до положения H, изображенных на Фиг.12. В процессе операции съемки первого кадра первый механизм привода затвора функционирует в качестве начального лепестка, а второй механизм привода затвора функционирует в качестве конечного лепестка. В процессе операции съемки второго кадра второй механизм привода затвора функционирует в качестве начального лепестка, а первый механизм привода затвора функционирует в качестве конечного лепестка. То есть в процессе операции съемки первого кадра первый механизм привода затвора выполняет операцию экспонирования перед срабатыванием второго механизма привода затвора. В процессе операции съемки второго кадра второй механизм привода затвора выполняет операцию экспонирования перед срабатыванием первого механизма привода затвора.
[0104] В настоящем варианте осуществления начало привода для разгона в первом механизме привода затвора отстает от начала привода для разгона во втором механизме привода затвора на время t2 экспонирования для второго кадра, посредством регулировки периода времени, в течение которого поддерживается электроснабжение для первого двигателя Ma.
[0105] Как изображено на Фиг.12, в положении H схема 13 управления управляет приводной схемой 14a таким образом, чтобы поддерживалось электроснабжение для первого двигателя Ma. В положении H схема 13 управления также управляет приводной схемой 14b таким образом, чтобы второй двигатель Mb приводился в движение по направлению движения часовой стрелки в режиме шагового привода. Соответственно, вторая роторная пластина 117 вращается против направления движения часовой стрелки посредством движущей силы второго двигателя Mb и принуждающей силы второй пружины 118. Второй механизм привода затвора начинает движение для разгона в режиме шагового привода в положении H. Соответственно, блок 20 затвора перемещается в положение G', изображенное на Фиг.12.
[0106] Состояние блока 20 затвора в положении G', изображенном на Фиг.12, является подобным состоянию, изображенному на Фиг.9.
[0107] Как изображено на Фиг.12, в положении G' схема 13 управления управляет приводной схемой 14a таким образом, чтобы первый двигатель Ma приводился в движение по направлению движения часовой стрелки в режиме шагового привода. Соответственно, первая роторная пластина 107 вращается против направления движения часовой стрелки посредством движущей силы первого двигателя Ma и принуждающей силы первой пружины 108. Первый механизм привода затвора начинает движение для разгона в режиме шагового привода в положении G'. В положении G' схема 13 управления управляет приводной схемой 14b таким образом, чтобы второй двигатель Mb приводился в движение по направлению движения часовой стрелки в режиме шагового привода. Соответственно, блок 20 затвора перемещается в положение F', изображенное на Фиг.12.
[0108] Состояние блока 20 затвора в положении F', изображенном на Фиг.12, является подобным состоянию, изображенному на Фиг.8.
[0109] Как изображено на Фиг.12, в положении F' схема 13 управления управляет приводной схемой 14a таким образом, чтобы первый двигатель Ma приводился в движение по направлению движения часовой стрелки в режиме шагового привода. В положении F' схема 13 управления управляет приводной схемой 14b таким образом, чтобы второй двигатель Mb приводился в движение по направлению движения часовой стрелки в режиме привода с обратной связью с большим углом опережения. Соответственно, блок 20 затвора перемещается в положение E', изображенное на Фиг.12. Второй механизм привода затвора начинает движение для экспонирования в режиме привода с обратной связью с большим углом опережения в положении F'. Поскольку скорость вращения второго двигателя Mb является достаточно большой, вследствие привода для разгона, второй двигатель Mb моет быть приведен в движение в режиме привода с обратной связью с большим углом опережения.
[0110] Состояние блока 20 затвора в положении F', изображенном на Фиг.12, является подобным состоянию, изображенному на Фиг.8.
[0111] Как изображено на Фиг.12, в положении E' схема 13 управления управляет приводной схемой 14a таким образом, чтобы первый двигатель Ma приводился в движение по направлению движения часовой стрелки в режиме привода с обратной связью с большим углом опережения. В положении E' схема 13 управления управляет приводной схемой 14b таким образом, чтобы второй двигатель Mb приводился в движение по направлению движения часовой стрелки в режиме привода с обратной связью с большим углом опережения. Соответственно, блок 20 затвора перемещается в положение D', изображенное на Фиг.12. Первый механизм привода затвора начинает движение для экспонирования в режиме привода с обратной связью с большим углом опережения в положении E'. Поскольку скорость вращения первого двигателя Ma является достаточно большой, вследствие привода для разгона, первый двигатель Ma может быть приведен в движение в режиме привода с обратной связью с большим углом опережения.
[0112] Состояние блока 20 затвора в положении E', изображенном на Фиг.12, является подобным состоянию, изображенному на Фиг.7.
[0113] Как изображено на Фиг.12, в положении D' схема 13 управления управляет приводной схемой 14a таким образом, чтобы первый двигатель Ma приводился в движение по направлению движения часовой стрелки в режиме привода с обратной связью с большим углом опережения. В положении D' схема 13 управления управляет приводной схемой 14b таким образом, чтобы второй двигатель Mb приводился в движение по направлению движения часовой стрелки в режиме привода с обратной связью с большим углом опережения. Соответственно, блок 20 затвора перемещается в положение C', изображенное на Фиг.12.
[0114] Состояние блока 20 затвора в положении C', изображенном на Фиг.12, является подобным состоянию, изображенному на Фиг.6.
[0115] Как изображено на Фиг.12, в положении C' схема 13 управления управляет приводной схемой 14a таким образом, чтобы первый двигатель Ma приводился в движение по направлению движения часовой стрелки в режиме привода с обратной связью с большим углом опережения. В положении C' схема 13 управления управляет приводной схемой 14b таким образом, чтобы поддерживалось электроснабжение для второго двигателя Mb. В данном случае поддержка электроснабжения указывает поддержку фазы электроснабжения для второго двигателя Mb в положении D. Соответственно, блок 20 затвора перемещается в положение I, изображенное на Фиг.12.
[0116] Фиг.11 включает в себя чертежи, предназначенные для описания состояния блока 20 затвора в положении I. Фиг.11(a) изображает чертеж, предназначенный для описания состояния первого механизма привода затвора. Фиг.11(b) изображает чертеж, предназначенный для описания состояния второго механизма привода затвора.
[0117] Как изображено на Фиг.11(a), в положении I первый лепесток 110 закрывает апертурную диафрагму 105a. Как изображено на Фиг.12, поскольку первый двигатель Ma приводится в движение по направлению движения часовой стрелки в период от положения C' до положения I, первая роторная пластина 107 вращается против направления движения часовой стрелки из состояния, изображенного на Фиг.5(a). В период от положения C' до положения I, выступающая секция 107a в первой роторной пластине 107 находится в контакте с секцией левого плеча первой пружины 108, при этом первая роторная пластина 107 вращается против направления движения часовой стрелки, наряду с нагрузкой первой пружины 108. То есть первая пружина 108 функционирует для применения торможения к вращению первой роторной пластины 107 против направления движения часовой стрелки. В состоянии, изображенном на Фиг.11(a), первая пружина 108 нагружается, при этом первая роторная пластина 107 принуждается посредством первой пружины 108 по направлению движения часовой стрелки.
[0118] Как изображено на Фиг.11(b), в положении I второй лепесток 120 открывает апертурную диафрагму 105a. Поскольку в положении C' поддерживается электроснабжение для второго двигателя Mb, второй двигатель Mb и вторая роторная пластина 117 остаются в положении C'. То есть состояние, изображенное на Фиг.5(b), является подобным состоянию, изображенному на Фиг.11(b).
[0119] Как было описано выше, блок 20 затвора, согласно настоящему варианту осуществления, выполняет операцию съемки второго кадра от положения H до положения I, изображенных на Фиг.12. В процессе операции съемки второго кадра второй механизм привода затвора функционирует в качестве начального лепестка, а первый механизм привода затвора функционирует в качестве конечного лепестка. В процессе операции съемки третьего кадра первый механизм привода затвора функционирует в качестве начального лепестка, а второй механизм привода затвора функционирует в качестве конечного лепестка. В настоящем варианте осуществления начало привода для разгона во втором механизме привода затвора отстает от начала привода для разгона в первом механизме привода затвора на время t3 экспонирования для третьего кадра посредством регулировки периода времени, в течение которого поддерживается электроснабжение для второго двигателя Mb.
[0120] Как изображено на Фиг.12, в положении I схема 13 управления управляет приводной схемой 14a таким образом, чтобы первый двигатель Ma приводился в движение против направления движения часовой стрелки в режиме шагового привода. Схема 13 управления управляет приводной схемой 14b таким образом, чтобы поддерживалось электроснабжение для второго двигателя Mb. Соответственно, блок 20 затвора перемещается в положение С, изображенное на Фиг.12.
[0121] Впоследствии выполняется операция съемки, подобная операции для первого кадра.
[0122]
Измененный вариант
Фиг.13 изображает временную диаграмму, предназначенную для описания операций блока 20 затвора, когда камера 100 работает в режиме непрерывной съемки, в качестве разновидности настоящего варианта осуществления.
[0123] В вышеописанном варианте осуществления отставание между начальным лепестком и конечным лепестком образуется посредством создания ситуации, когда момент времени для начала привода для разгона в механизме привода затвора, функционирующим в качестве начального лепестка, и момент времени для начала привода для разгона в механизме привода затвора, функционирующего в качестве конечного лепестка, являются различными.
[0124] Для сравнения, в измененном варианте отставание между начальным лепестком и конечным лепестком образуется посредством создания ситуации, когда частота импульсов для привода для разгона в механизме привода затвора, функционирующем в качестве начального лепестка, и частота импульсов для привода для разгона в механизме привода затвора, функционирующем в качестве конечного лепестка, являются различными. То есть частоте импульсов для привода для разгона в механизме привода затвора, функционирующем в качестве начального лепестка, задается значение, превышающее частоту импульсов для привода для разгона в механизме привода затвора, функционирующем в качестве конечного лепестка. Соответственно, даже в подобный период разгона, время, необходимое для привода для разгона в механизме привода затвора, функционирующем в качестве конечного лепестка, является большим, чем время, необходимое для привода для разгона в механизме привода затвора, функционирующем в качестве начального лепестка.
[0125] В измененном варианте в положении А, изображенном на Фиг.13, схема 13 управления управляет приводной схемой 14a таким образом, чтобы первый двигатель Ma приводился в движение по направлению движения часовой стрелки в режиме привода с обратной связью с малым углом опережения. В положении А, изображенном на Фиг.13, схема 13 управления управляет приводной схемой 14b таким образом, чтобы второй двигатель Mb приводился в движение по направлению движения часовой стрелки в режиме привода с обратной связью с малым углом опережения. Соответственно, блок 20 затвора перемещается в положение I, изображенное на Фиг.13.
[0126] В положении I, изображенном на Фиг.13, схема 13 управления управляет приводной схемой 14a таким образом, чтобы первый двигатель Ma приводился в движение против направления движения часовой стрелки в режиме шагового привода. В положении I, изображенном на Фиг.13, схема 13 управления управляет приводной схемой 14b таким образом, чтобы второй двигатель Mb приводился в движение против направления движения часовой стрелки в режиме шагового привода. Соответственно, блок 20 затвора перемещается в положение D, изображенное на Фиг.13.
[0127] Состояние от положения D до положения G, изображенных на Фиг.13, является подобным состоянию от положения D до положения G, изображенных на Фиг.12, в вышеописанном варианте осуществления.
[0128] В положении G, изображенном на Фиг.13, схема 13 управления также управляет приводной схемой 14a таким образом, чтобы первый двигатель Ma приводился в движение против направления движения часовой стрелки в режиме привода с обратной связью с большим углом опережения. В положении D, изображенном на Фиг.13, схема 13 управления также управляет приводной схемой 14b таким образом, чтобы второй двигатель Mb приводился в движение против направления движения часовой стрелки в режиме привода с обратной связью с большим углом опережения.
[0129] В вышеописанном варианте осуществления в положении G, изображенном на Фиг.12, схема 13 управления управляет приводной схемой 14a таким образом, чтобы поддерживалось электроснабжение для первого двигателя Ma. В измененном варианте схема 13 управления управляет приводной схемой 14a таким образом, чтобы первый двигатель Ma приводился в движение против направления движения часовой стрелки в режиме привода с обратной связью с большим углом опережения. Соответственно, несмотря на то, что первая роторная пластина 107 пытается вращаться по направлению движения часовой стрелки, поскольку выступающая секция 107a в первой роторной пластине 107 вступает в контакт со стопором на покрывающей пластине 103, вращение первой роторной пластины 107 по направлению движения часовой стрелки блокируется.
[0130] Характеристики в измененном варианте являются практически подобными характеристикам в вышеописанном варианте осуществления, за исключением способа образования отставания между начальным лепестком и конечным лепестком, и аспекта, в котором не выполняется поддержка электроснабжения.
[0131] Далее, со ссылкой на Фиг.14-16, будет представлено подробное описание первого двигателя Ma и второго двигателя Mb.
[0132] Фиг.14 изображает двигатель 1, используемый как в качестве первого двигателя Ma, так и в качестве второго двигателя Mb. Для упрощения описания, части некоторых компонентов на чертеже были удалены.
[0133] Как изображено на Фиг.14, ротор 3 включает в себя магнит 2, при этом посредством схемы 13 управления (контроллера) и приводной схемы 14 осуществляется управление таким ротором с возможностью вращения. Магнит 2 является цилиндрическим, имеет периферийную поверхность, разделенную на ее круговом направлении, и попеременно намагничивается многополюсным способом в разных полюсах. В настоящем варианте осуществления магнит 2 делится на восемь элементов, то есть намагничивается в восьми полюсах. Количество секторов не ограничивается восьмью. Магнит 2 может быть намагничен в четырех или двенадцати полюсах.
[0134] Первый контур 4 располагается на первом конце магнита 2 в его осевом направлении.
[0135] Первое ярмо 6 изготавливается из мягкого магнитного материала и располагается напротив периферийной поверхности магнита 2 таким образом, чтобы между ними присутствовал промежуток. Первое ярмо 6 выступает в осевом направлении из кольцевой части основного корпуса и включает в себя множество первых секций 6a магнитного полюса, расположенных через заданные интервалы в его круговом направлении. Первые секции 6a магнитного полюса возбуждаются посредством энергоснабжения первого контура 4.
[0136] Первый контур 4, первое ярмо 6 и магнит 2, расположенный напротив множества первых секций 6a магнитного полюса, формируют первый блок статора.
[0137] Второй контур 5 располагается на втором конце магнита 2 в его осевом направлении, при этом второй конец располагается напротив первого конца, на котором располагается первый контур 4.
[0138] Второе ярмо 7 изготавливается из мягкого магнитного материала и располагается напротив периферийной поверхности магнита 2 таким образом, чтобы между ними присутствовал промежуток. Второе ярмо 7 выступает в осевом направлении из кольцевой части основного корпуса и включает в себя множество вторых секций 7a магнитного полюса, расположенных через заданные интервалы в его круговом направлении. Вторые секции 7а магнитного полюса возбуждаются посредством энергоснабжения второго контура 5.
[0139] Второй контур 5, второе ярмо 7 и магнит 2, расположенный напротив множества вторых секций 7a магнитного полюса, формируют второй блок статора.
[0140] Крутящий момент, обеспечиваемый ротору 3, может быть изменен посредством переключения намагниченной полярности (северный полюс, южный полюс) каждой из первой секции 6a магнитного полюса и второй секции 7a магнитного полюса.
[0141] Первый магнитный датчик 8 (первый элемент обнаружения), второй магнитный датчик 9 (второй элемент обнаружения), третий магнитный датчик 10 (третий элемент обнаружения) и четвертый магнитный датчик 11 (четвертый элемент обнаружения) формируют средство обнаружения. Каждый магнитный датчик является элементом на эффекте холла, выполненным с возможностью обнаружения магнитного потока магнита 2, который прикрепляется к крышке 12 двигателя.
[0142] Крышка 12 двигателя крепит и удерживает первое ярмо 6 и второе ярмо 7 таким образом, чтобы первые секции 6a магнитного полюса и вторые секции 7a магнитного полюса смещались относительно фазы намагниченности магнита 2 на электрический угол, приблизительно равный 90 градусам.
[0143] В данном случае электрический угол является углом, представленным на основе предположения того, что один цикл магнитной силы магнита составляет 360°. Электрический угол θ может быть выражен посредством нижеследующего уравнения:
θ=θ0×M/2
где M - количество полюсов ротора, а механический угол - θ0.
[0144] В настоящем варианте осуществления магнит 2 намагничивается в восьми полюсах, при этом 90 градусов в электрическом углу являются эквивалентными 22.5 градусам в механическом углу.
[0145] Схема 13 управления может переключить привод между режимом шагового привода и двумя режимами привода с обратной связью с разными величинами угла опережения. На этапе привода схема 13 управления управляет приводной схемой 14 таким образом, чтобы состояние энергоснабжения первого контура 4 и второго контура 5 переключалось через заданные интервалы времени. То есть на этапе привода не используются выходные сигналы первого магнитного датчика 8, второго магнитного датчика 9, третьего магнитного датчика 10 и четвертого магнитного датчика 11.
[0146] Ниже будет описан случай, когда схема 13 управления выполняет привод с обратной связью. Когда схема 13 управления выполняет два режима привода с обратной связью, используются выходные сигналы первого магнитного датчика 8, второго магнитного датчика 9, третьего магнитного датчика 10 и четвертого магнитного датчика 11.
[0147] В настоящем варианте осуществления, даже в случае изменения направления энергоснабжения, большая вращательная движущая сила может быть получена посредством расположения каждого магнитного датчика в позиционном соотношении относительно каждого нижеописанного ярма.
[0148] Фиг.15 включает в себя чертежи, предназначенные для описания операций двигателя 1. Фактические операции двигателя 1 описаны со ссылкой на Фиг.15(a) - 15(i). Состояние, изображенное на Фиг.15(a), описывается в качестве первоначального состояния в процессе привода.
[0149] (1) Привод по направлению движения часовой стрелки
(1-i) Привод с малым углом опережения (первый режим энергоснабжения)
Описывается режим привода по направлению движения часовой стрелки с малым углом опережения. Режим привода с малым углом опережения может обеспечить крутящий момент, превышающий крутящий момент в нижеописанном режиме привода с большим углом опережения.
[0150] В режиме привода по направлению движения часовой стрелки с малым углом опережения ротор 3 вращается по направлению движения часовой стрелки посредством переключения возбуждения каждой первой секции 6a магнитного полюса в ответ на выходной сигнал первого магнитного датчика 8, а также посредством переключения возбуждения каждой второй секции 7a магнитного полюса в ответ на выходной сигнал второго магнитного датчика 9. Направление вращения ротора 3 по направлению движения часовой стрелки соответствует первому направлению вращения.
[0151] В этом режиме привода направление энергоснабжения как первого контура 4, так и второго контура 5 изменяется с использованием нижеописанных комбинаций.
[0152] Когда первый магнитный датчик 8 обнаруживает южный полюс магнита 2 (изменение с северного полюса на южный полюс), его сигнал обнаружения вводится в схему 13 управления. Схема 13 управления управляет приводной схемой 14 таким образом, чтобы первая секция 6a магнитного полюса намагничивалась с помощью северного полюса. Когда первый магнитный датчик 8 обнаруживает северный полюс магнита 2 (изменение с южного полюса на северный полюс), его сигнал обнаружения вводится в схему 13 управления. Схема 13 управления управляет приводной схемой 14 таким образом, чтобы первая секция 6a магнитного полюса намагничивалась с помощью южного полюса.
[0153] Когда второй магнитный датчик 9 обнаруживает южный полюс магнита 2 (изменение с северного полюса на южный полюс), его сигнал обнаружения вводится в схему 13 управления. Схема 13 управления управляет приводной схемой 14 таким образом, чтобы вторая секция 7a магнитного полюса намагничивалась с помощью южного полюса. Когда второй магнитный датчик 9 обнаруживает северный полюс магнита 2 (изменение с южного полюса на северный полюс), его сигнал обнаружения вводится в схему 13 управления. Схема 13 управления управляет приводной схемой 14 таким образом, чтобы вторая секция 7a магнитного полюса намагничивалась с помощью северного полюса.
[0154] В состоянии, изображенном на Фиг.15(a), как первый магнитный датчик 8, так и второй магнитный датчик 9 обнаруживают южный полюс магнита 2. На данном этапе схема 13 управления управляет приводной схемой 14 таким образом, чтобы первая секция 6a магнитного полюса намагничивалась с помощью северного полюса, а вторая секция 7a магнитного полюса намагничивалась с помощью южного полюса. Таким способом в роторе 3 и магните 2 генерируется сила вращения по направлению движения часовой стрелки.
[0155] Когда ротор 3 вращается по направлению движения часовой стрелки из состояния, изображенного на Фиг.15(a), центр Q1 каждого южного полюса магнита 2 и центр соответствующей первой секции 6a магнитного полюса, располагаются напротив друг друга, как изображено на Фиг.15(b).
[0156] Когда ротор 3 вращается по направлению движения часовой стрелки из состояния, изображенного на Фиг.15(b), расстояние между центром Q1 южного полюса магнита 2 и первой секцией 6a магнитного полюса является подобным расстоянию между центром Q2 каждого северного полюса магнита 2 и соответствующей второй секцией 7a магнитного полюса, как изображено на Фиг.15(c).
[0157] Первый магнитный датчик 8 располагается таким образом, чтобы в случае, когда намагниченная полярность первой секции 6a магнитного полюса переключается на основе выходного сигнала первого магнитного датчика 8, момент переключения возбуждения для первой секции 6a магнитного полюса относительно позиции вращения ротора 3 соответствовал электрическому углу опережения от 0 градусов до 45 градусов.
[0158] Первый магнитный датчик 8 обнаруживает северный полюс магнита 2 (изменение с южного полюса на северный полюс) между состоянием, изображенным на Фиг.15(b), и состоянием, изображенным на Фиг.15(c). На данном этапе приводная схема 14 снабжает энергией первый контур 4 таким образом, чтобы первая секция 6a магнитного полюса намагничивалась с помощью южного полюса. Поскольку второй магнитный датчик 9 обнаруживает южный полюс магнита 2 между состоянием, изображенным на Фиг.15(b), и состоянием, изображенным на Фиг.15(c), приводная схема 14 снабжает энергией второй контур 5 таким образом, чтобы вторая секция 7a магнитного полюса намагничивалась с помощью южного полюса. Таким способом в роторе 3 и магните 2 генерируется сила вращения по направлению движения часовой стрелки.
[0159] Когда ротор 3 вращается по направлению движения часовой стрелки из состояния, изображенного на Фиг.15(c), центр Q2 северного полюса магнита 2 и центр второй секции 7a магнитного полюса располагаются напротив друг друга, как изображено на Фиг.15(d).
[0160] Когда ротор 3 вращается по направлению движения часовой стрелки из состояния, изображенного на Фиг.15(d), расстояние между центром Q2 северного полюса магнита 2 и первой секцией 6a магнитного полюса является подобным расстоянию между центром Q2 северного полюса магнита 2 и второй секцией 7a магнитного полюса, как изображено на Фиг.15(e).
[0161] Второй магнитный датчик 9 располагается таким образом, чтобы в случае, когда намагниченная полярность второй секции 7a магнитного полюса переключается на основе выходного сигнала второго магнитного датчика 9, момент переключения возбуждения для второй секции 7a магнитного полюса относительно позиции вращения ротора 3 соответствовал электрическому углу опережения от 0 градусов до 45 градусов.
[0162] Второй магнитный датчик 9 обнаруживает северный полюс магнита 2 (изменение с южного полюса на северный полюс) между состоянием, изображенным на Фиг.15(d), и состоянием, изображенным на Фиг.15(e). На данном этапе приводная схема 14 снабжает энергией второй контур 5 таким образом, чтобы вторая секция 7a магнитного полюса намагничивалась с помощью северного полюса. Поскольку первый магнитный датчик 8 обнаруживает северный полюс магнита 2 между состоянием, изображенным на Фиг.15(d), и состоянием, изображенным на Фиг.15(e), приводная схема 14 снабжает энергией первый контур 4 таким образом, чтобы первая секция 6a магнитного полюса намагничивалась с помощью южного полюса. Таким способом в роторе 3 и магните 2 генерируется сила вращения по направлению движения часовой стрелки.
[0163] Как было описано выше, в режиме привода по направлению движения часовой стрелки с малым углом опережения энергоснабжение первого контура 4 и второго контура 5 последовательно переключается посредством выходных сигналов первого магнитного датчика 8 и второго магнитного датчика 9, при этом ротор 3 и магнит 2 вращаются по направлению движения часовой стрелки.
[0164] Когда ротор 3 вращается по направлению движения часовой стрелки, при этом намагниченная полярность первой секции 6a магнитного полюса переключается на основе выходного сигнала первого магнитного датчика 8, момент переключения возбуждения для первой секции 6a магнитного полюса относительно позиции вращения ротора 3 соответствует электрическому углу опережения от 0 градусов до 45 градусов. То есть первый магнитный датчик 8 располагается в позиции, в которой величина угла опережения с позиции электрического угла опережения в 0 градусов с момента переключения возбуждения в первой секции 6a магнитного полюса меньше величины угла отставания с позиции электрического угла опережения в 90 градусов с момента переключения возбуждения в первой секции 6a магнитного полюса.
[0165] Когда ротор 3 вращается по направлению движения часовой стрелки, при этом намагниченная полярность второй секции 7a магнитного полюса переключается на основе выходного сигнала второго магнитного датчика 9, момент переключения возбуждения для второй секции 7a магнитного полюса относительно позиции вращения ротора 3 соответствует электрическому углу опережения от 0 градусов до 45 градусов. То есть второй магнитный датчик 9 располагается в позиции, в которой величина угла опережения с позиции электрического угла опережения в 0 градусов с момента переключения возбуждения во второй секции 7a магнитного полюса меньше величины угла отставания с позиции электрического угла опережения в 90 градусов с момента переключения возбуждения во второй секции 7a магнитного полюса.
[0166] (1-ii) Привод с большим углом опережения (второй режим энергоснабжения)
Описывается режим привода по направлению движения часовой стрелки с большим углом опережения. Режим привода с большим углом опережения может обеспечить скорость вращения, превышающую скорость вращению в вышеописанном режиме привода с малым углом опережения.
[0167] В режиме привода по направлению движения часовой стрелки с большим углом опережения ротор 3 вращается по направлению движения часовой стрелки посредством переключения намагниченной полярности первой секции 6a магнитного полюса в ответ на выходной сигнал третьего магнитного датчика 10, а также посредством переключения намагниченной полярности второй секции 7a магнитного полюса в ответ на выходной сигнал четвертого магнитного датчика 11. В этом режиме привода направление энергоснабжения как первого контура 4, так и второго контура 5 изменяется с использованием нижеописанных комбинаций.
[0168] Когда третий магнитный датчик 10 обнаруживает южный полюс магнита 2 (изменение с северного полюса на южный полюс), его сигнал обнаружения вводится в схему 13 управления. Схема 13 управления управляет приводной схемой 14 таким образом, чтобы первая секция 6a магнитного полюса намагничивалась с помощью северного полюса. Когда третий магнитный датчик 10 обнаруживает северный полюс магнита 2 (изменение с южного полюса на северный полюс), его сигнал обнаружения вводится в схему 13 управления. Схема 13 управления управляет приводной схемой 14 таким образом, чтобы первая секция 6a магнитного полюса намагничивалась с помощью южного полюса.
[0169] Когда четвертый магнитный датчик 11 обнаруживает южный полюс магнита 2 (изменение с северного полюса на южный полюс), его сигнал обнаружения вводится в схему 13 управления. Схема 13 управления управляет приводной схемой 14 таким образом, чтобы вторая секция 7a магнитного полюса намагничивалась с помощью южного полюса. Когда четвертый магнитный датчик 11 обнаруживает северный полюс магнита 2 (изменение с южного полюса на северный полюс), его сигнал обнаружения вводится в схему 13 управления. Схема 13 управления управляет приводной схемой 14 таким образом, чтобы вторая секция 7a магнитного полюса намагничивалась с помощью северного полюса.
[0170] В состоянии, изображенном на Фиг.15(a), как третий магнитный датчик 10, так и четвертый магнитный датчик 11 обнаруживают южный полюс магнита 2. Соответственно, когда первая секция 6a магнитного полюса намагничивается с помощью северного полюса, а вторая секция 7a магнитного полюса намагничивается с помощью южного полюса, в роторе 3 и магните 2 генерируется сила вращения по направлению движения часовой стрелки.
[0171] Когда ротор 3 вращается по направлению движения часовой стрелки из состояния, изображенного на Фиг.15(a), центр Q1 каждого южного полюса магнита 2 и центр соответствующей первой секции 6a магнитного полюса располагаются напротив друг друга, как изображено на Фиг.15(b).
[0172] Третий магнитный датчик 10 располагается таким образом, чтобы в случае, когда намагниченная полярность первой секции 6a магнитного полюса переключается на основе выходного сигнала третьего магнитного датчика 10, момент переключения возбуждения для первой секции 6a магнитного полюса относительно позиции вращения ротора 3 соответствовал электрическому углу опережения от 45 градусов до 90 градусов.
[0173] Третий магнитный датчик 10 обнаруживает северный полюс магнита 2 (изменение с южного полюса на северный полюс) между состоянием, изображенным на Фиг.15(a), и состоянием, изображенным на Фиг.15(b). На данном этапе приводная схема 14 снабжает энергией первый контур 4 таким образом, чтобы первая секция 6a магнитного полюса намагничивалась с помощью южного полюса. Поскольку четвертый магнитный датчик 11 обнаруживает южный полюс магнита 2 между состоянием, изображенным на Фиг.15(a), и состоянием, изображенным на Фиг.15(b), приводная схема 14 снабжает энергией второй контур 5 таким образом, чтобы вторая секция 7a магнитного полюса намагничивалась с помощью южного полюса. Таким способом в роторе 3 и магните 2 генерируется сила вращения по направлению движения часовой стрелки.
[0174] Когда ротор 3 вращается по направлению движения часовой стрелки из состояния, изображенного на Фиг.15(b), состояние перемещается в состояние, изображенное на Фиг.15(c), в результате чего центр Q2 северного полюса магнита 2 и центр второй секции 7a магнитного полюса располагаются напротив друг друга, как изображено на Фиг.15(d).
[0175] Четвертый магнитный датчик 11 располагается таким образом, чтобы в случае, когда намагниченная полярность второй секции 7a магнитного полюса переключается на основе выходного сигнала четвертого магнитного датчика 11, момент переключения возбуждения для второй секции 7a магнитного полюса относительно позиции вращения ротора 3 соответствовал электрическому углу опережения от 45 градусов до 90 градусов.
[0176] Четвертый магнитный датчик 11 обнаруживает северный полюс магнита 2 (изменение с южного полюса на северный полюс) между состоянием, изображенным на Фиг.15(c), и состоянием, изображенным на Фиг.15(d). На данном этапе приводная схема 14 снабжает энергией второй контур 5 таким образом, чтобы вторая секция 7a магнитного полюса намагничивалась с помощью северного полюса. Поскольку третий магнитный датчик 10 обнаруживает северный полюс магнита 2 между состоянием, изображенным на Фиг.15(c), и состоянием, изображенным на Фиг.15(d), приводная схема 14 снабжает энергией первый контур 4 таким образом, чтобы первая секция 6a магнитного полюса намагничивалась с помощью южного полюса. Таким способом в роторе 3 и магните 2 генерируется сила вращения по направлению движения часовой стрелки.
[0177] Как было описано выше, в режиме привода по направлению движения часовой стрелки с большим углом опережения энергоснабжение первого контура 4 и второго контура 5 последовательно переключается посредством выходных сигналов третьего магнитного датчика 10 и четвертого магнитного датчика 11, при этом ротор 3 и магнит 2 вращаются по направлению движения часовой стрелки.
[0178] Когда ротор 3 вращается по направлению движения часовой стрелки, при этом намагниченная полярность первой секции 6a магнитного полюса переключается на основе выходного сигнала третьего магнитного датчика 10, момент переключения возбуждения для первой секции 6a магнитного полюса относительно позиции вращения ротора 3 соответствует электрическому углу опережения от 45 градусов до 90 градусов. То есть третий магнитный датчик 10 располагается в позиции, в которой величина угла опережения с позиции электрического угла опережения в 0 градусов с момента переключения возбуждения в первой секции 6a магнитного полюса больше величины угла отставания с позиции электрического угла опережения в 90 градусов с момента переключения возбуждения в первой секции 6a магнитного полюса.
[0179] Когда ротор 3 вращается по направлению движения часовой стрелки, при этом намагниченная полярность второй секции 7a магнитного полюса переключается на основе выходного сигнала четвертого магнитного датчика 11, момент переключения возбуждения для второй секции 7a магнитного полюса относительно позиции вращения ротора 3 соответствует электрическому углу опережения от 45 градусов до 90 градусов. То есть четвертый магнитный датчик 11 располагается в позиции, в которой величина угла опережения с позиции электрического угла опережения в 0 градусов с момента переключения возбуждения во второй секции 7a магнитного полюса больше величины угла отставания с позиции электрического угла опережения в 90 градусов с момента переключения возбуждения во второй секции 7a магнитного полюса.
[0180] (2) Привод против направления движения часовой стрелки
(2-i) Привод с малым углом опережения (третий режим энергоснабжения)
Описывается режим привода против направления движения часовой стрелки с малым углом опережения. Даже в процессе вращения против направления движения часовой стрелки режим привода с малым углом опережения может обеспечить крутящий момент, превышающий крутящий момент в режиме привода с большим углом опережения.
[0181] В режиме привода против направления движения часовой стрелки с малым углом опережения ротор 3 вращается против направления движения часовой стрелки посредством переключения возбуждения каждой секции 6a первого магнитного полюса в ответ на выходной сигнал третьего магнитного датчика 10, а также посредством переключения возбуждения каждой секции 7a второго магнитного полюса в ответ на выходной сигнал четвертого магнитного датчика 11. Направление вращения ротора 3 против направления движения часовой стрелки соответствует второму направлению вращения, противоположному первому направлению вращения.
[0182] В этом режиме привода направление энергоснабжения как первого контура 4, так и второго контура 5 изменяется с использованием нижеописанных комбинаций.
[0183] Когда третий магнитный датчик 10 обнаруживает южный полюс магнита 2 (изменение с северного полюса на южный полюс), его сигнал обнаружения вводится в схему 13 управления. Схема 13 управления управляет приводной схемой 14 таким образом, чтобы первая секция 6a магнитного полюса намагничивалась с помощью южного полюса. Когда третий магнитный датчик 10 обнаруживает северный полюс магнита 2 (изменение с южного полюса на северный полюс), его сигнал обнаружения вводится в схему 13 управления. Схема 13 управления управляет приводной схемой 14 таким образом, чтобы первая секция 6a магнитного полюса намагничивалась с помощью северного полюса.
[0184] Когда четвертый магнитный датчик 11 обнаруживает южный полюс магнита 2 (изменение с северного полюса на южный полюс), его сигнал обнаружения вводится в схему 13 управления. Схема 13 управления управляет приводной схемой 14 таким образом, чтобы вторая секция 7a магнитного полюса намагничивалась с помощью северного полюса. Когда четвертый магнитный датчик 11 обнаруживает северный полюс магнита 2 (изменение с южного полюса на северный полюс), его сигнал обнаружения вводится в схему 13 управления. Схема 13 управления управляет приводной схемой 14 таким образом, чтобы вторая секция 7a магнитного полюса намагничивалась с помощью южного полюса.
[0185] В состоянии, изображенном на Фиг.15(a), как третий магнитный датчик 10, так и четвертый магнитный датчик 11 обнаруживают южный полюс магнита 2. На данном этапе схема 13 управления управляет приводной схемой 14 таким образом, чтобы первая секция 6a магнитного полюса намагничивалась с помощью южного полюса, а вторая секция 7a магнитного полюса намагничивалась с помощью северного полюса. Таким способом в роторе 3 и магните 2 генерируется сила вращения против направления движения часовой стрелки.
[0186] Когда ротор 3 вращается против направления движения часовой стрелки из состояния, изображенного на Фиг.15(a), центр Q1 южного полюса магнита 2 и центр второй секции 7a магнитного полюса располагаются напротив друг друга, как изображено на Фиг.15(f).
[0187] Когда ротор 3 вращается против направления движения часовой стрелки из состояния, изображенного на Фиг.15(f), расстояние между центром Q1 южного полюса магнита 2 и второй секцией 7a магнитного полюса является подобным расстоянию между центром Q3 северного полюса магнита 2 и первой секцией 6a магнитного полюса, как изображено на Фиг.15(g).
[0188] Четвертый магнитный датчик 11 располагается таким образом, чтобы в случае, когда намагниченная полярность второй секции 7a магнитного полюса переключается на основе выходного сигнала четвертого магнитного датчика 11, момент переключения возбуждения для второй секции 7a магнитного полюса относительно позиции вращения ротора 3 соответствовал электрическому углу опережения от 0 градусов до 45 градусов.
[0189] Северный полюс магнита 2 (изменение с южного полюса на северный полюс) обнаруживается между состоянием, изображенным на Фиг.15(f), и состоянием, изображенным на Фиг.15(g). На данном этапе приводная схема 14 снабжает энергией второй контур 5 таким образом, чтобы вторая секция 7a магнитного полюса намагничивалась с помощью южного полюса. Поскольку третий магнитный датчик 10 обнаруживает южный полюс магнита 2 между состоянием, изображенным на Фиг.15(f), и состоянием, изображенным на Фиг.15(g), приводная схема 14 снабжает энергией первый контур 4 таким образом, чтобы первая секция 6a магнитного полюса намагничивалась с помощью южного полюса. Таким способом в роторе 3 и магните 2 генерируется сила вращения против направления движения часовой стрелки.
[0190] Когда ротор 3 вращается против направления движения часовой стрелки из состояния, изображенного на Фиг.15(g), центр Q3 северного полюса магнита 2 и центр первой секции 6a магнитного полюса располагаются напротив друг друга, как изображено на Фиг.15(h).
[0191] Когда ротор 3 вращается против направления движения часовой стрелки из состояния, изображенного на Фиг.15(h), расстояние между центром Q3 северного полюса магнита 2 и первой секцией 6a магнитного полюса является подобным расстоянию между центром Q3 северного полюса магнита 2 и второй секцией 7a магнитного полюса, как изображено на Фиг.15(i).
[0192] Третий магнитный датчик 10 располагается таким образом, чтобы в случае, когда намагниченная полярность первой секции 6a магнитного полюса переключается на основе выходного сигнала третьего магнитного датчика 10, момент переключения возбуждения для первой секции 6a магнитного полюса относительно позиции вращения ротора 3 соответствовал электрическому углу опережения от 0 градусов до 45 градусов.
[0193] Третий магнитный датчик 10 обнаруживает северный полюс магнита 2 (изменение с южного полюса на северный полюс) между состоянием, изображенным на Фиг.15(h), и состоянием, изображенным на Фиг.15(i). На данном этапе приводная схема 14 снабжает энергией первый контур 4 таким образом, чтобы первая секция 6a магнитного полюса намагничивалась с помощью северного полюса. Поскольку четвертый магнитный датчик 11 обнаруживает северный полюс магнита 2 между состоянием, изображенным на Фиг.15(h), и состоянием, изображенным на Фиг.15(i), приводная схема 14 снабжает энергией второй контур 5 таким образом, чтобы вторая секция 7a магнитного полюса намагничивалась с помощью южного полюса. Таким способом в роторе 3 и магните 2 генерируется сила вращения против направления движения часовой стрелки.
[0194] Как было описано выше, в режиме привода против направления движения часовой стрелки с малым углом опережения энергоснабжение первого контура 4 и второго контура 5 последовательно переключается посредством выходных сигналов третьего магнитного датчика 10 и четвертого магнитного датчика 11, при этом ротор 3 и магнит 2 вращаются против направления движения часовой стрелки.
[0195] Когда ротор 3 вращается против направления движения часовой стрелки, при этом намагниченная полярность первой секции 6a магнитного полюса переключается на основе выходного сигнала третьего магнитного датчика 10, момент переключения возбуждения для первой секции 6a магнитного полюса относительно позиции вращения ротора 3 соответствует электрическому углу опережения от 0 градусов до 45 градусов.
[0196] Когда ротор 3 вращается против направления движения часовой стрелки, при этом намагниченная полярность второй секции 7a магнитного полюса переключается на основе выходного сигнала четвертого магнитного датчика 11, момент переключения возбуждения для второй секции 7a магнитного полюса относительно позиции вращения ротора 3 соответствует электрическому углу опережения от 0 градусов до 45 градусов.
[0197] (2-ii) Привод с большим углом опережения (четвертый режим энергоснабжения)
Описывается режим привода против направления движения часовой стрелки с большим углом опережения. Даже в процессе вращения против направления движения часовой стрелки режим привода с большим углом опережения может обеспечить скорость вращения, превышающую скорость вращения в вышеописанном режиме привода с малым углом опережения.
[0198] В режиме привода против направления движения часовой стрелки с большим углом опережения ротор 3 вращается против направления движения часовой стрелки посредством переключения возбуждения каждой секции 6a первого магнитного полюса в ответ на выходной сигнал первого магнитного датчика 8, а также посредством переключения возбуждения каждой секции 7a второго магнитного полюса в ответ на выходной сигнал второго магнитного датчика 9.
[0199] В этом режиме привода направление энергоснабжения как первого контура 4, так и второго контура 5 изменяется с использованием нижеописанных комбинаций.
[0200] Когда первый магнитный датчик 8 обнаруживает южный полюс магнита 2 (изменение с северного полюса на южный полюс), его сигнал обнаружения вводится в схему 13 управления. Схема 13 управления управляет приводной схемой 14 таким образом, чтобы первая секция 6a магнитного полюса намагничивалась с помощью южного полюса. Когда первый магнитный датчик 8 обнаруживает северный полюс магнита 2 (изменение с южного полюса на северный полюс), его сигнал обнаружения вводится в схему 13 управления. Схема 13 управления управляет приводной схемой 14 таким образом, чтобы первая секция 6a магнитного полюса намагничивалась с помощью северного полюса.
[0201] Когда второй магнитный датчик 9 обнаруживает южный полюс магнита 2 (изменение с северного полюса на южный полюс), его сигнал обнаружения вводится в схему 13 управления. Схема 13 управления управляет приводной схемой 14 таким образом, чтобы вторая секция 7a магнитного полюса намагничивалась с помощью северного полюса. Когда второй магнитный датчик 9 обнаруживает северный полюс магнита 2 (изменение с южного полюса на северный полюс), его сигнал обнаружения вводится в схему 13 управления. Схема 13 управления управляет приводной схемой 14 таким образом, чтобы вторая секция 7a магнитного полюса намагничивалась с помощью южного полюса.
[0202] В состоянии, изображенном на Фиг.15(a), как первый магнитный датчик 8, так и второй магнитный датчик 9 обнаруживают южный полюс магнита 2. Соответственно, когда первая секция 6a магнитного полюса намагничивается с помощью южного полюса, а вторая секция 7a магнитного полюса намагничивается с помощью северного полюса, в роторе 3 и магните 2 генерируется сила вращения против направления движения часовой стрелки.
[0203] Когда ротор 3 вращается против направления движения часовой стрелки из состояния, изображенного на Фиг.15(a), центр Q1 южного полюса магнита 2 и центр второй секции 7a магнитного полюса располагаются напротив друг друга, как изображено на Фиг.15(f).
[0204] Второй магнитный датчик 9 располагается таким образом, чтобы в случае, когда намагниченная полярность второй секции 7a магнитного полюса переключается на основе выходного сигнала второго магнитного датчика 9, момент переключения возбуждения для второй секции 7a магнитного полюса относительно позиции вращения ротора 3 соответствовал электрическому углу опережения от 45 градусов до 90 градусов.
[0205] Второй магнитный датчик 9 обнаруживает северный полюс магнита 2 (изменение с южного полюса на северный полюс) между состоянием, изображенным на Фиг.15(a), и состоянием, изображенным на Фиг.15(f). На данном этапе приводная схема 14 снабжает энергией второй контур 5 таким образом, чтобы вторая секция 7a магнитного полюса намагничивалась с помощью северного полюса. Поскольку первый магнитный датчик 8 обнаруживает южный полюс магнита 2 между состоянием, изображенным на Фиг.15(a), и состоянием, изображенным на Фиг.15(f), приводная схема 14 снабжает энергией первый контур 4 таким образом, чтобы первая секция 6a магнитного полюса намагничивалась с помощью южного полюса. Таким способом в роторе 3 и магните 2 генерируется сила вращения против направления движения часовой стрелки.
[0206] Когда ротор 3 вращается против направления движения часовой стрелки из состояния, изображенного на Фиг.15(f), состояние перемещается в состояние, изображенное на Фиг.15(g), в результате чего центр Q3 северного полюса магнита 2 и центр первой секции 6a магнитного полюса располагаются напротив друг друга, как изображено на Фиг.15(h).
[0207] Первый магнитный датчик 8 располагается таким образом, чтобы в случае, когда намагниченная полярность первой секции 6a магнитного полюса переключается на основе выходного сигнала первого магнитного датчика 8, момент переключения возбуждения для первой секции 6a магнитного полюса относительно позиции вращения ротора 3 соответствовал электрическому углу опережения от 45 градусов до 90 градусов.
[0208] Первый магнитный датчик 8 обнаруживает северный полюс магнита 2 (изменение с южного полюса на северный полюс) между состоянием, изображенным на Фиг.15(g), и состоянием, изображенным на Фиг.15(h). На данном этапе приводная схема 14 снабжает энергией первый контур 4 таким образом, чтобы первая секция 6a магнитного полюса намагничивалась с помощью северного полюса. Поскольку второй магнитный датчик 9 обнаруживает северный полюс магнита 2 между состоянием, изображенным на Фиг.15(g), и состоянием, изображенным на Фиг.15(h), приводная схема 14 снабжает энергией второй контур 5 таким образом, чтобы вторая секция 7a магнитного полюса намагничивалась с помощью южного полюса. Таким способом в роторе 3 и магните 2 генерируется сила вращения против направления движения часовой стрелки.
[0209] Как было описано выше, в режиме привода против направления движения часовой стрелки с большим углом опережения энергоснабжение первого контура 4 и второго контура 5 последовательно переключается посредством выходных сигналов первого магнитного датчика 8 и второго магнитного датчика 9, при этом ротор 3 и магнит 2 вращаются против направления движения часовой стрелки.
[0210] Когда ротор 3 вращается против направления движения часовой стрелки, при этом намагниченная полярность первой секции 6a магнитного полюса переключается на основе выходного сигнала первого магнитного датчика 8, момент переключения возбуждения для первой секции 6a магнитного полюса относительно позиции вращения ротора 3 соответствует электрическому углу опережения от 45 градусов до 90 градусов.
[0211] Когда ротор 3 вращается против направления движения часовой стрелки, при этом намагниченная полярность второй секции 7a магнитного полюса переключается на основе выходного сигнала второго магнитного датчика 9, момент переключения возбуждения для второй секции 7a магнитного полюса относительно позиции вращения ротора 3 соответствует электрическому углу опережения от 45 градусов до 90 градусов.
[0212] Фиг.16 включает в себя чертежи, предназначенные для описания позиций, в которых располагается первый магнитный датчик 8, второй магнитный датчик 9, третий магнитный датчик 10 и четвертый магнитный датчик 11. Как изображено на фиг.16(a) - 16(d), первый магнитный датчик 8 в двигателе 1, согласно настоящему варианту осуществления, располагается в позиции, которая удовлетворяет следующим условиям.
(a) В процессе привода по направлению движения часовой стрелки, когда намагниченная полярность первой секции 6a магнитного полюса переключается на основе выходного сигнала первого магнитного датчика 8, момент переключения возбуждения для первой секции 6a магнитного полюса относительно позиции вращения ротора 3 соответствует электрическому углу опережения от 0 градусов до 45 градусов (см. Фиг.16(a)).
(b) В процессе привода против направления движения часовой стрелки, когда намагниченная полярность первой секции 6a магнитного полюса переключается на основе выходного сигнала первого магнитного датчика 8, момент переключения возбуждения для первой секции 6a магнитного полюса относительно позиции вращения ротора 3 соответствует электрическому углу опережения от 45 градусов до 90 градусов (см. Фиг.16(c)).
[0213] Второй магнитный датчик 9 в двигателе 1, согласно настоящему варианту осуществления, располагается в позиции, которая удовлетворяет следующим условиям.
(c) В процессе привода по направлению движения часовой стрелки, когда намагниченная полярность второй секции 7a магнитного полюса переключается на основе выходного сигнала второго магнитного датчика 9, момент переключения возбуждения для второй секции 7a магнитного полюса относительно позиции вращения ротора 3 соответствует электрическому углу опережения от 0 градусов до 45 градусов (см. Фиг.16(b)).
(d) В процессе привода против направления движения часовой стрелки, когда намагниченная полярность второй секции 7a магнитного полюса переключается на основе выходного сигнала второго магнитного датчика 9, момент переключения возбуждения для второй секции 7a магнитного полюса относительно позиции вращения ротора 3 соответствует электрическому углу опережения от 0 градусов до 90 градусов (см. Фиг.16(d)).
[0214] Третий магнитный датчик 10 в двигателе 1, согласно настоящему варианту осуществления, располагается в позиции, которая удовлетворяет следующим условиям.
(e) В процессе привода по направлению движения часовой стрелки, когда намагниченная полярность первой секции 6a магнитного полюса переключается на основе выходного сигнала третьего магнитного датчика 10, момент переключения возбуждения для первой секции 6a магнитного полюса относительно позиции вращения ротора 3 соответствует электрическому углу опережения от 0 градусов до 90 градусов (см. Фиг.16(a)).
(f) В процессе привода против направления движения часовой стрелки, когда намагниченная полярность первой секции 6a магнитного полюса переключается на основе выходного сигнала третьего магнитного датчика 10, момент переключения возбуждения для первой секции 6a магнитного полюса относительно позиции вращения ротора 3 соответствует электрическому углу опережения от 0 градусов до 45 градусов (см. Фиг.16(c)).
[0215] Четвертый магнитный датчик 11 в двигателе 1, согласно настоящему варианту осуществления, располагается в позиции, которая удовлетворяет следующим условиям.
(g) В процессе привода по направлению движения часовой стрелки, когда намагниченная полярность второй секции 7a магнитного полюса переключается на основе выходного сигнала четвертого магнитного датчика 11, момент переключения возбуждения для второй секции 7a магнитного полюса относительно позиции вращения ротора 3 соответствует электрическому углу опережения от 0 градусов до 90 градусов (см. Фиг.16(b)).
(h) В процессе привода против направления движения часовой стрелки, когда намагниченная полярность второй секции 7a магнитного полюса переключается на основе выходного сигнала четвертого магнитного датчика 11, момент переключения возбуждения для второй секции 7a магнитного полюса относительно позиции вращения ротора 3 соответствует электрическому углу опережения от 0 градусов до 45 градусов (см. Фиг.16(d)).
[0216] В настоящем варианте осуществления, принимая во внимание погрешности в намагниченности магнитов, погрешности в размерах датчиков и погрешности ярма, каждый магнитный датчик располагается в нижеописанном диапазоне.
[0217] Первый магнитный датчик 8 располагается в диапазоне, в котором момент переключения возбуждения для первой секции 6a магнитного полюса в процессе привода по направлению движения часовой стрелки соответствует электрическому углу опережения от 14.4 градусов до 33.6 градусов, а момент переключения возбуждения для первой секции 6a магнитного полюса в процессе привода против направления движения часовой стрелки соответствует электрическому углу опережения от 56.4 градусов до 75.6 градусов.
[0218] Второй магнитный датчик 9 располагается в диапазоне, в котором момент переключения возбуждения для второй секции 7a магнитного полюса в процессе привода по направлению движения часовой стрелки соответствует электрическому углу опережения от 14.4 градусов до 33.6 градусов, а момент переключения возбуждения для второй секции 7a магнитного полюса в процессе привода против направления движения часовой стрелки соответствует электрическому углу опережения от 56.4 градусов до 75.6 градусов.
[0219] Третий магнитный датчик 10 располагается в диапазоне, в котором момент переключения возбуждения для первой секции 6a магнитного полюса в процессе привода по направлению движения часовой стрелки соответствует электрическому углу опережения от 56.4 градусов до 75.6 градусов, а момент переключения возбуждения для первой секции 6a магнитного полюса в процессе привода против направления движения часовой стрелки соответствует электрическому углу опережения от 14.4 градусов до 33.6 градусов.
[0220] Четвертый магнитный датчик 11 располагается в диапазоне, в котором момент переключения возбуждения для второй секции 7a магнитного полюса в процессе привода по направлению движения часовой стрелки соответствует электрическому углу опережения от 56.4 градусов до 75.6 градусов, а момент переключения возбуждения для второй секции 7a магнитного полюса в процессе привода против направления движения часовой стрелки соответствует электрическому углу опережения от 14.4 градусов до 33.6 градусов.
[0221] Средняя точка отрезка линии, соединяющего первый магнитный датчик 8 с третьим магнитным датчиком 10, соответствует электрическому углу опережения в 45 градусов в момент переключения возбуждения для первой секции 6a магнитного полюса. Средняя точка отрезка линии, соединяющего второй магнитный датчик 9 с четвертым магнитным датчиком 11, соответствует электрическому углу опережения в 45 градусов в момент переключения возбуждения для второй секции 7a магнитного полюса. Таким способом в настоящем варианте осуществления между приводом по направлению движения часовой стрелки и приводом против направления движения часовой стрелки сокращаются изменения в характеристиках привода.
[0222] Настоящий вариант осуществления использует сенсорный блок, в котором первый магнитный датчик 8 и третий магнитный датчик 10 формируют отдельный блок, при этом второй магнитный датчик 9 и четвертый магнитный датчик 11 также формируют отдельный блок. В этом случае в процессе привода по направлению движения часовой стрелки первый магнитный датчик 8 располагается в позиции, в которой момент переключения возбуждения для первой секции 6a магнитного полюса соответствует электрическому углу опережения в 21 градус, при этом третий магнитный датчик 10 располагается в позиции, в которой момент переключения возбуждения для первой секции 6a магнитного полюса соответствует электрическому углу опережения в 69 градусов. В процессе привода по направлению движения часовой стрелки второй магнитный датчик 9 располагается в позиции, в которой момент переключения возбуждения для второй секции 7a магнитного полюса соответствует электрическому углу опережения в 21 градус, при этом четвертый магнитный датчик 11 располагается в позиции, в которой момент переключения возбуждения для второй секции 7a магнитного полюса соответствует электрическому углу опережения в 69 градусов.
[0223] Выше был описан предпочтительный вариант осуществления настоящего изобретения. Настоящее изобретение не ограничивается этими вариантами осуществления, при этом в рамках объема изобретения могут быть произведены различные модификации и изменения.
Перечень ссылочных позиций
[0224] 1 - Двигатель
2 - Магнит
3 - Ротор
4 - Первый контур
5 - Второй контур
6 - Первое ярмо
6a - Первая секция магнитного полюса
7 - Второе ярмо
7a - Вторая секция магнитного полюса
8 - Первый магнитный датчик
9 - Второй магнитный датчик
10 - Третий магнитный датчик
11 - Четвертый магнитный датчик
12 - Крышка двигателя
13 - Схема управления
14 - Приводная схема
20 - Блок затвора.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЭЛЕКТРОМАГНИТНОГО ЗАТВОРА | 1993 |
|
RU2103709C1 |
| УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ЭЛЕКТРОДВИГАТЕЛЯ | 2013 |
|
RU2609606C2 |
| МЕЖЛИНЗОВОЕ ЗАТВОРНОЕ УСТРОЙСТВО ДЛЯ ФОТОАППАРАТА, СРАБАТЫВАЕМОЕ В ЗАВИСИМОСТИ ОТ АПЕРТУРЫ | 1993 |
|
RU2095843C1 |
| УСТРОЙСТВО В ПЕЧАТНОМ МЕХАНИЗМЕ ПЕЧАТНОЙ МАШИНЫ | 2009 |
|
RU2451605C1 |
| РЕЗОНАНСНЫЙ ПРИВОДНОЙ МЕХАНИЗМ ДЛЯ ЭЛЕКТРИЧЕСКОЙ ЗУБНОЙ ЩЕТКИ, ИСПОЛЬЗУЮЩИЙ ДЕЙСТВИЕ МАГНИТНОГО ПОЛЯ | 2011 |
|
RU2575915C2 |
| РАКЕТНЫЙ ТОПЛИВНЫЙ НАСОС | 2017 |
|
RU2740046C1 |
| ЭЛЕКТРОННОЕ УСТРОЙСТВО | 2011 |
|
RU2480939C1 |
| МНОГОПОЛЮСНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1989 |
|
RU2008757C1 |
| СИСТЕМА ЗАЖИГАНИЯ | 1996 |
|
RU2174187C2 |
| МОДУЛЬНО-ДИСКОВАЯ УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 2008 |
|
RU2368996C1 |
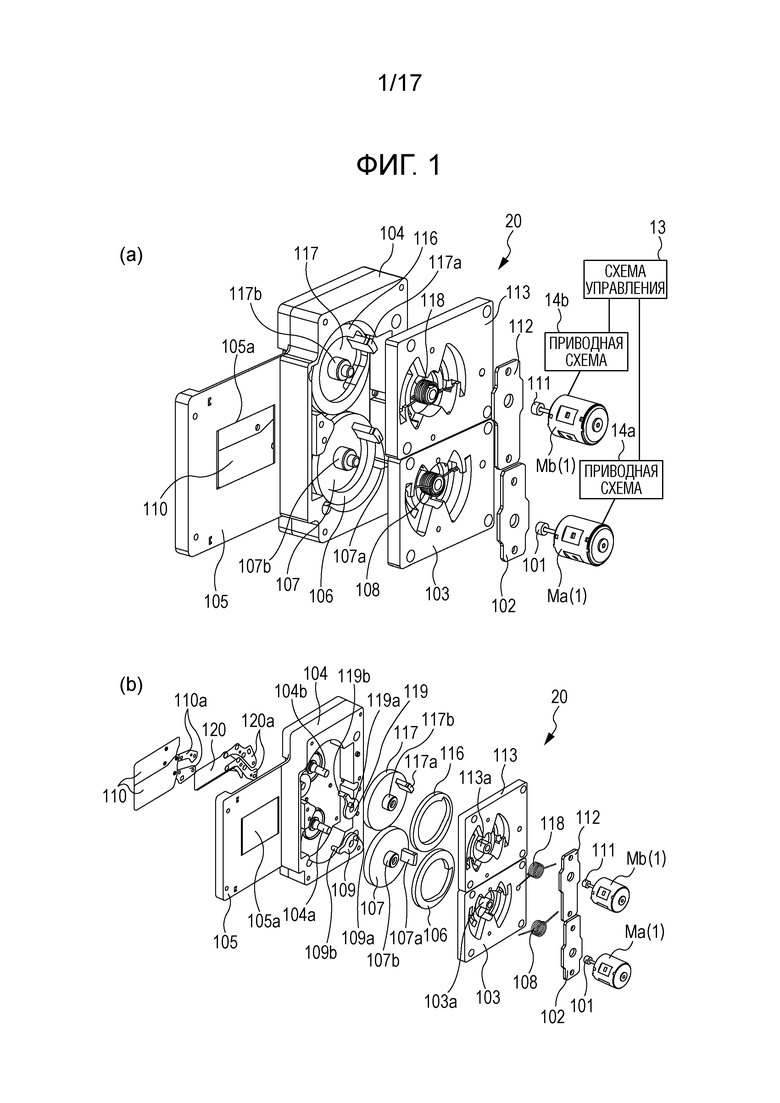
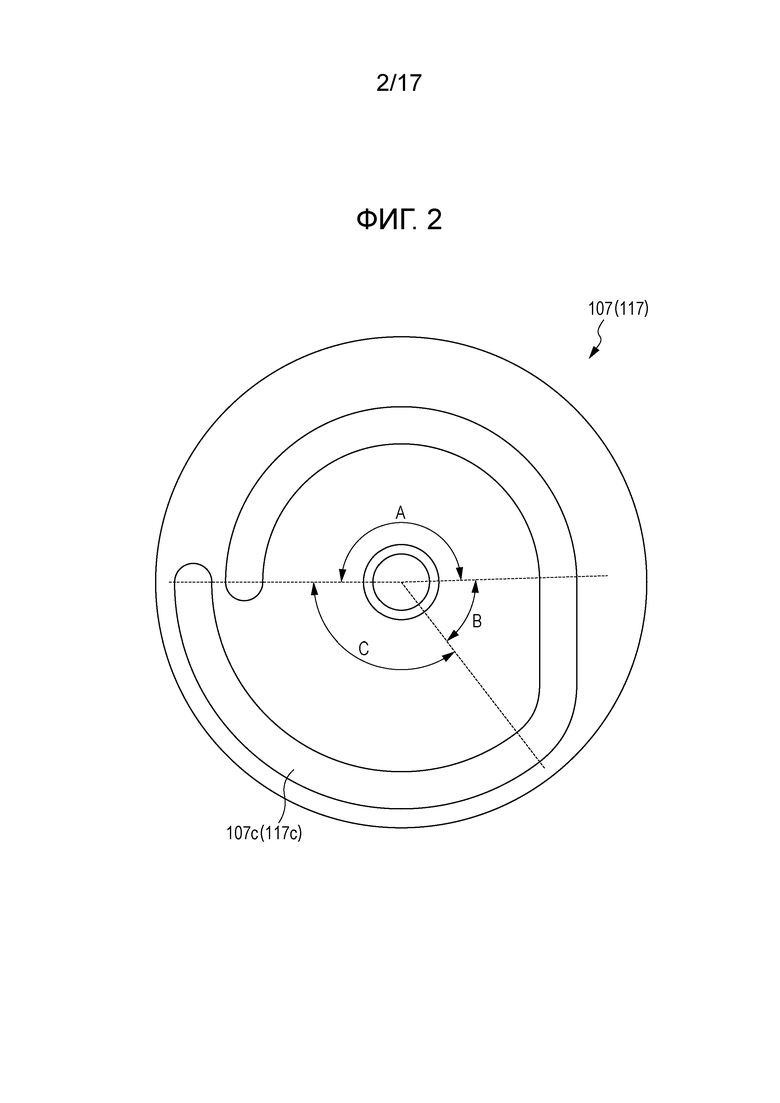
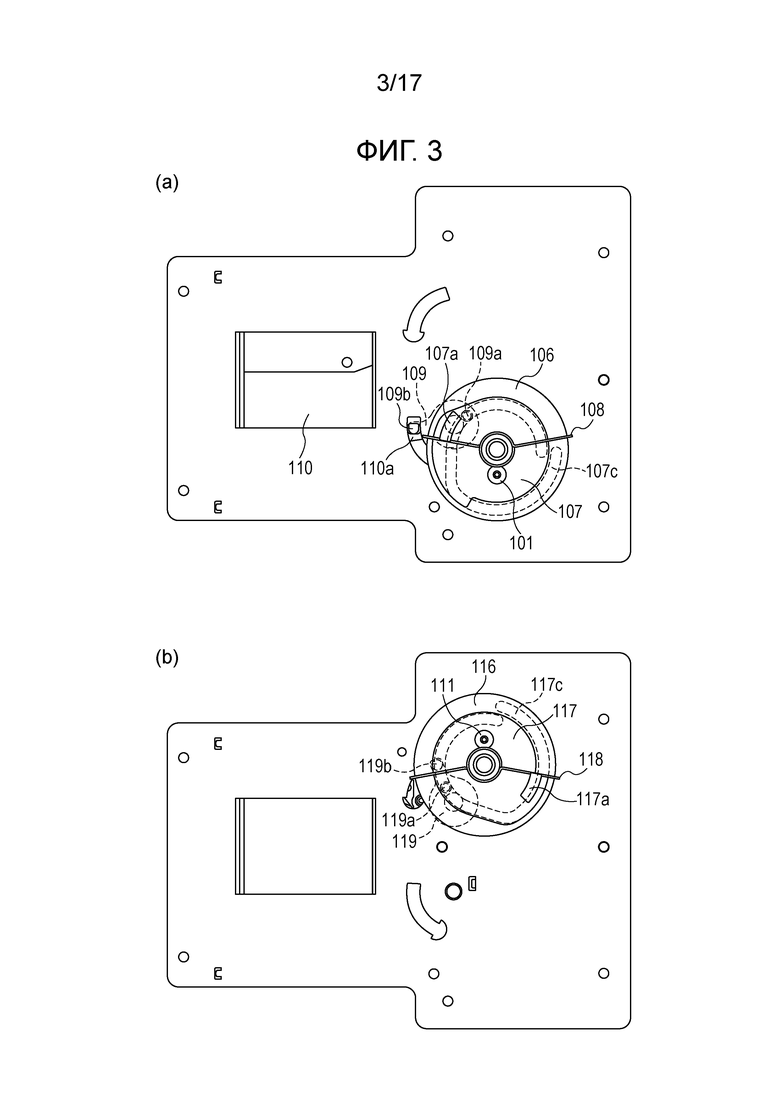
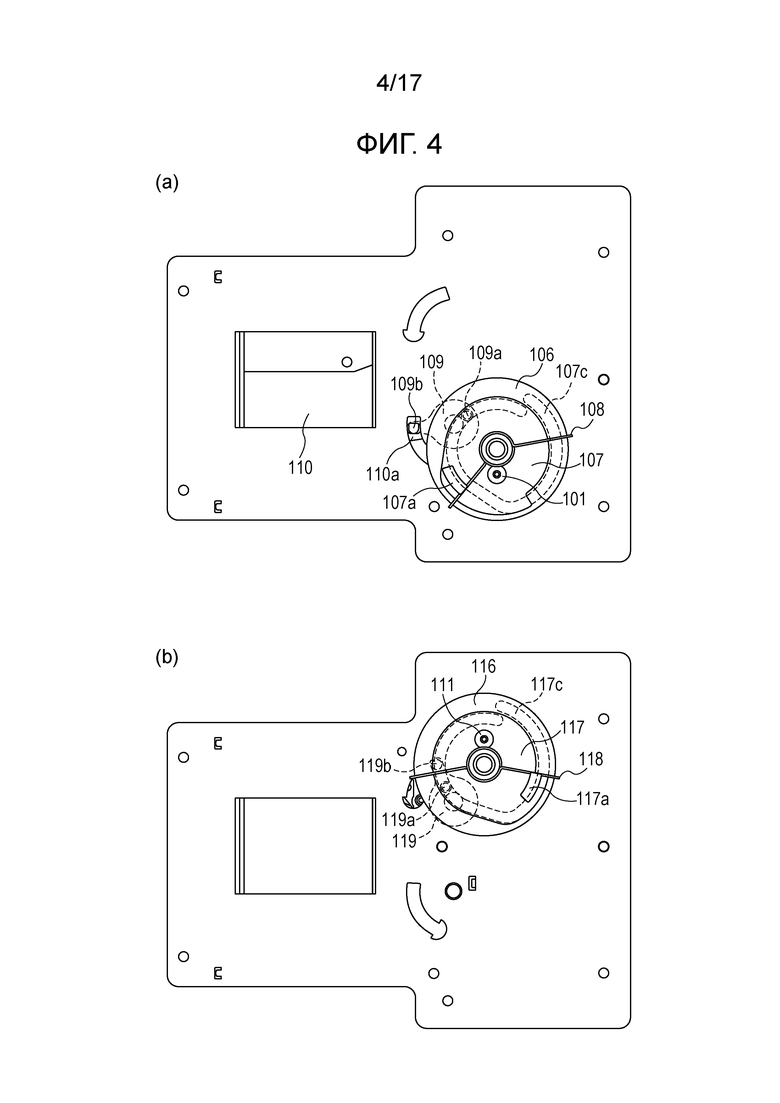
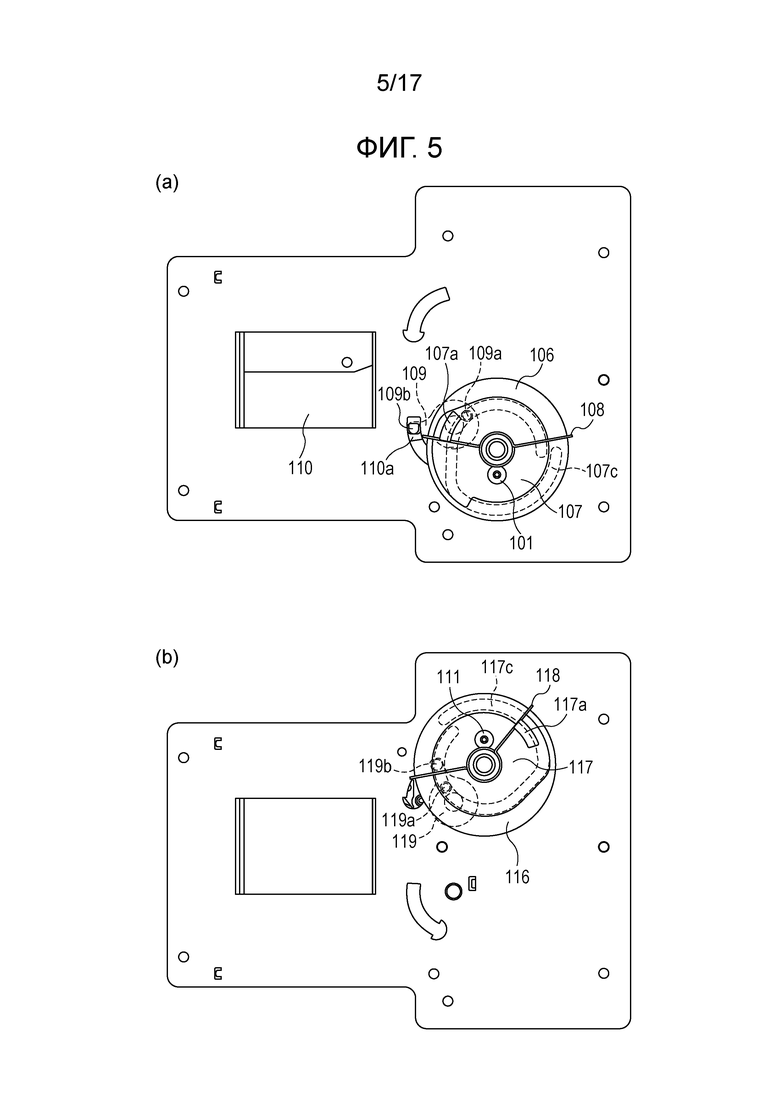
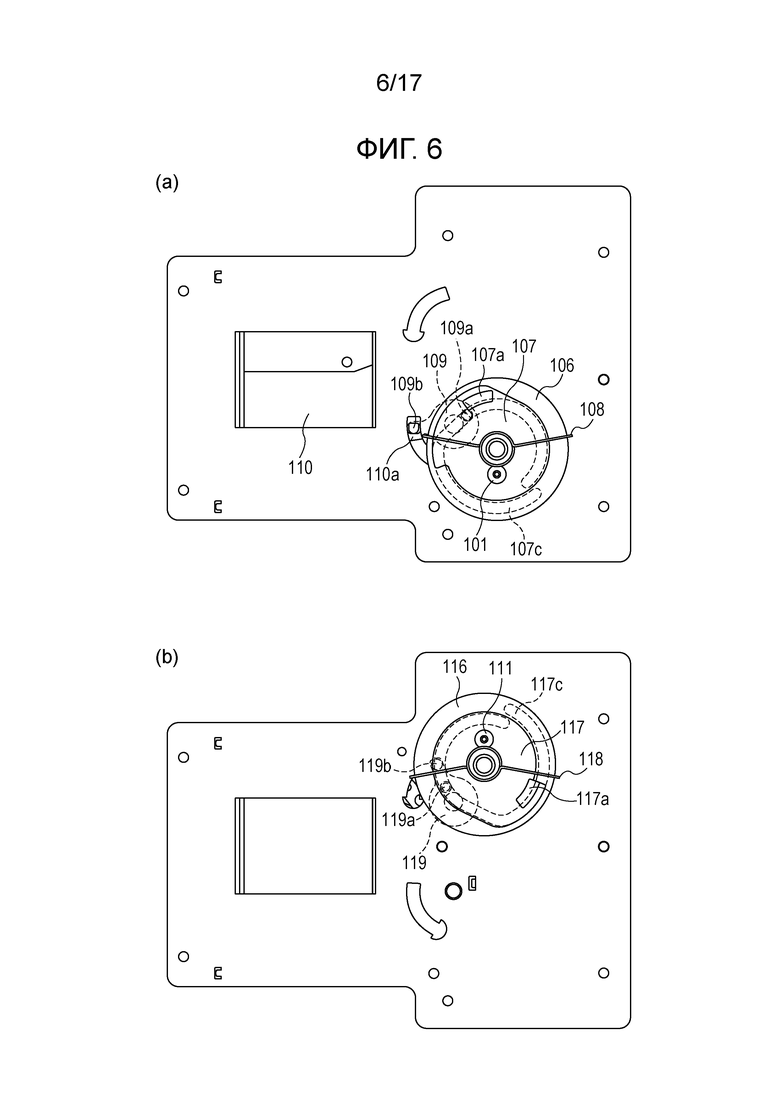

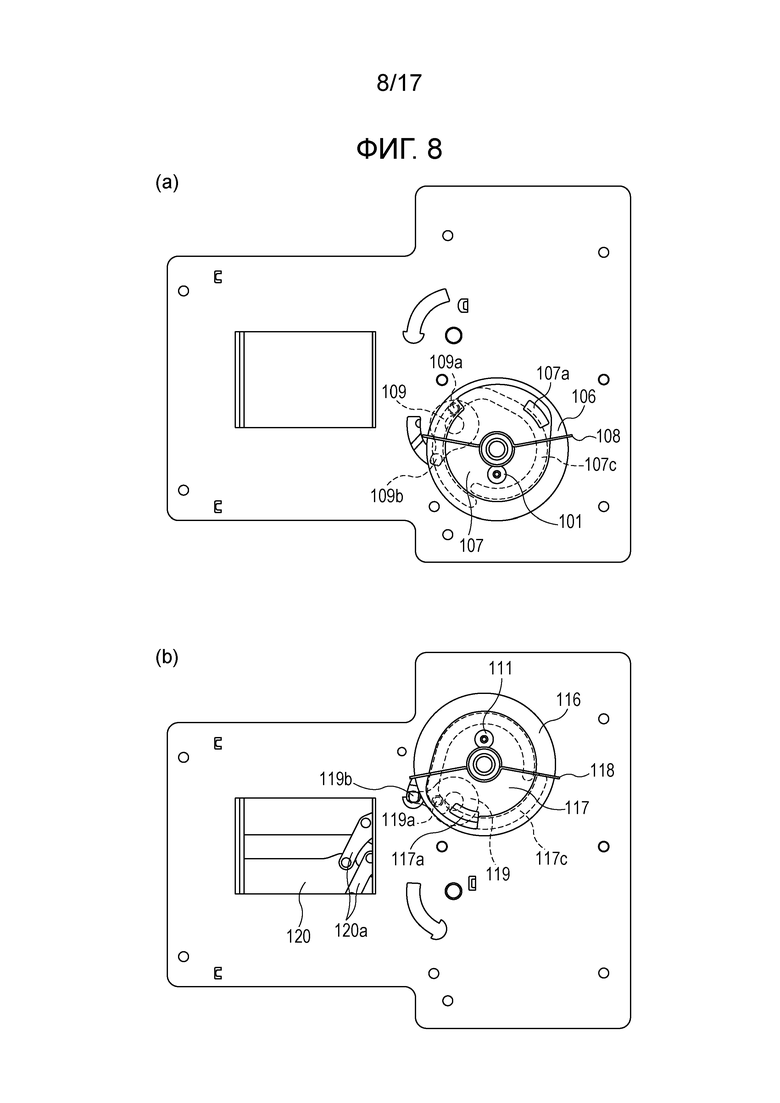
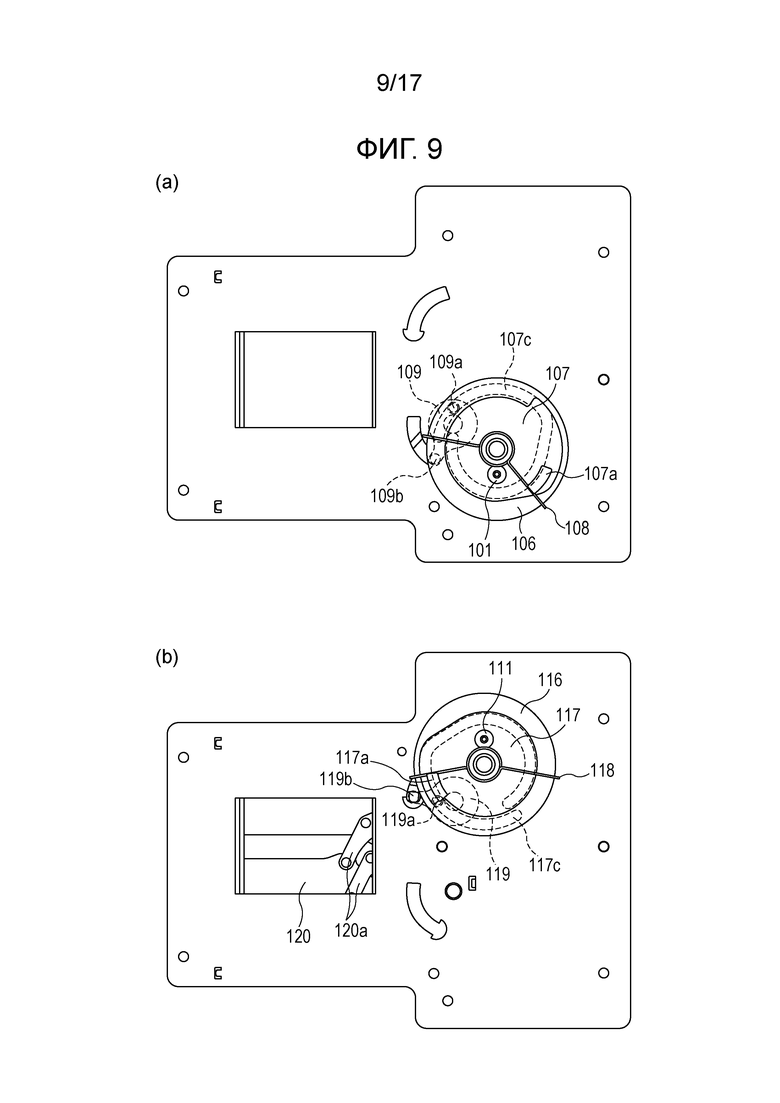
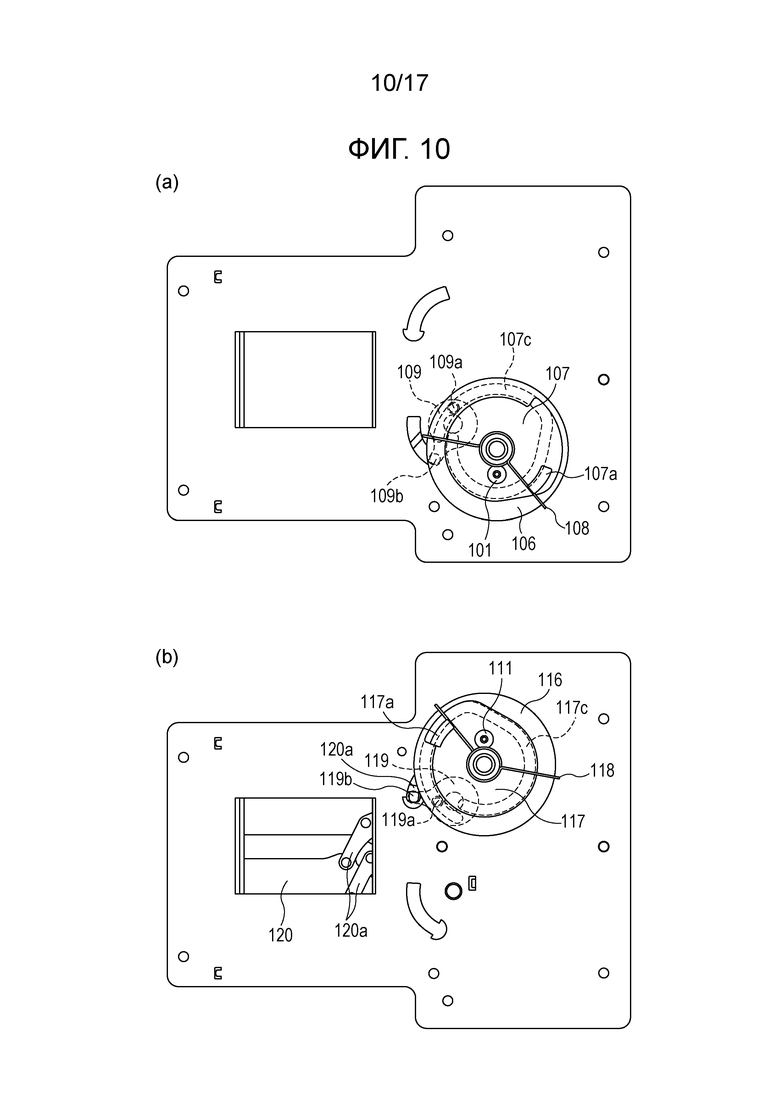
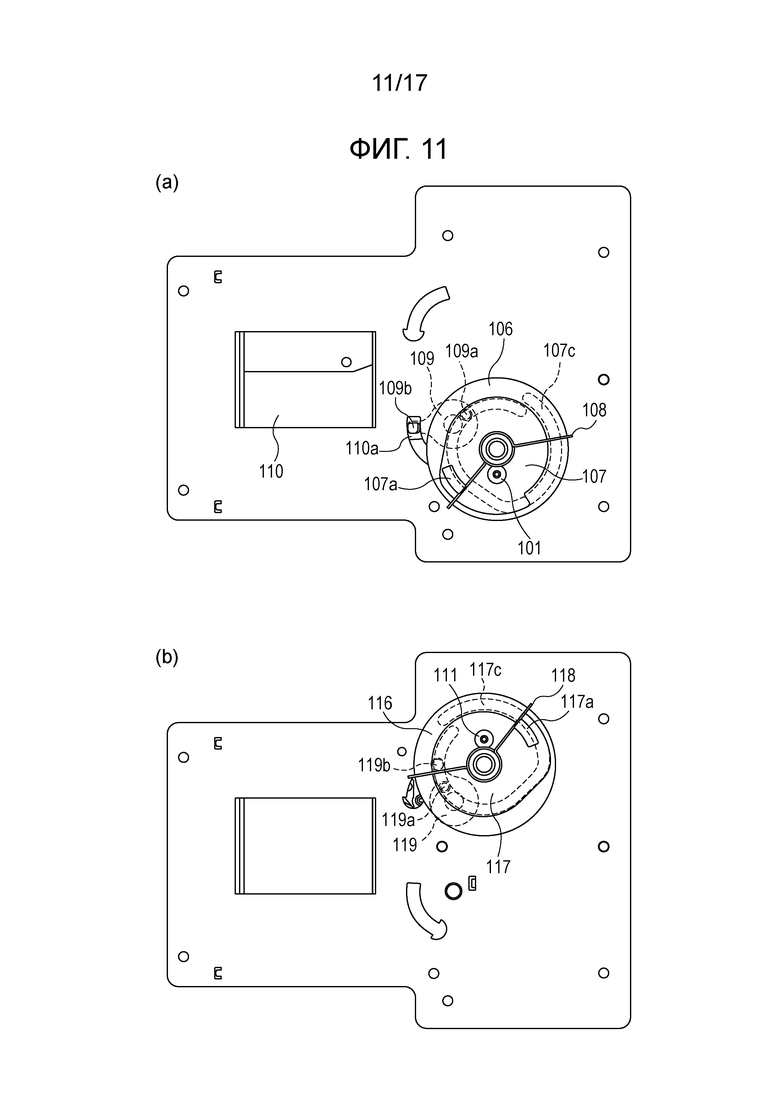
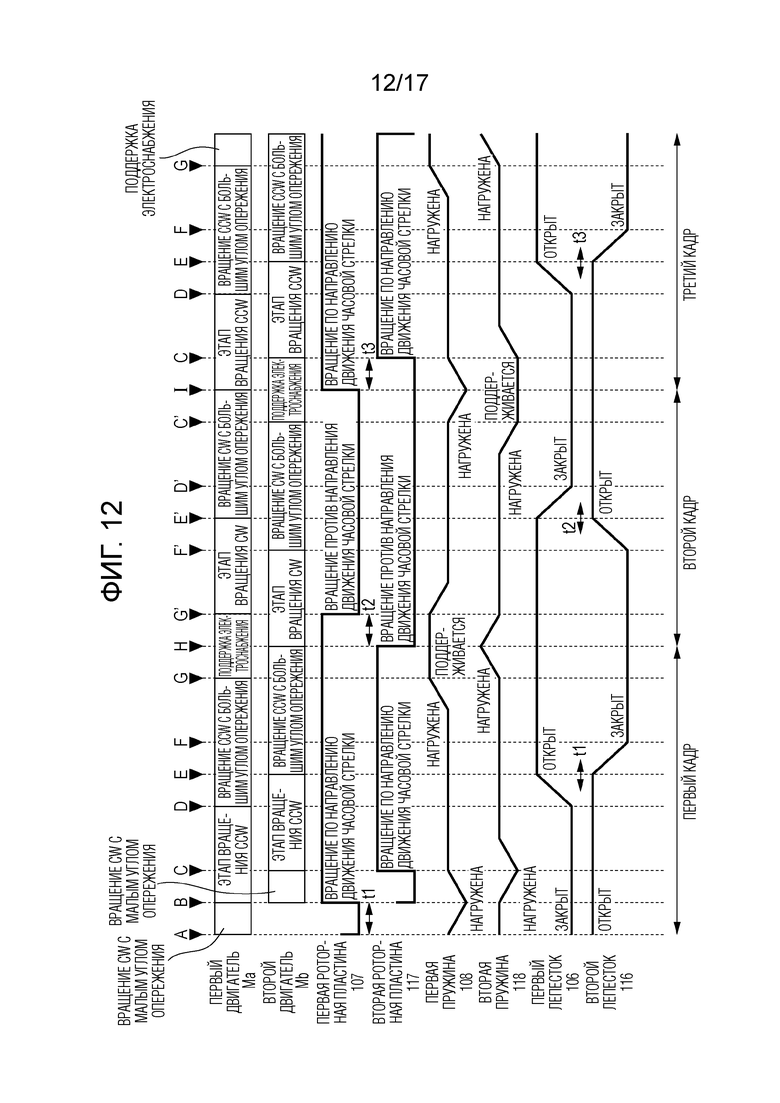
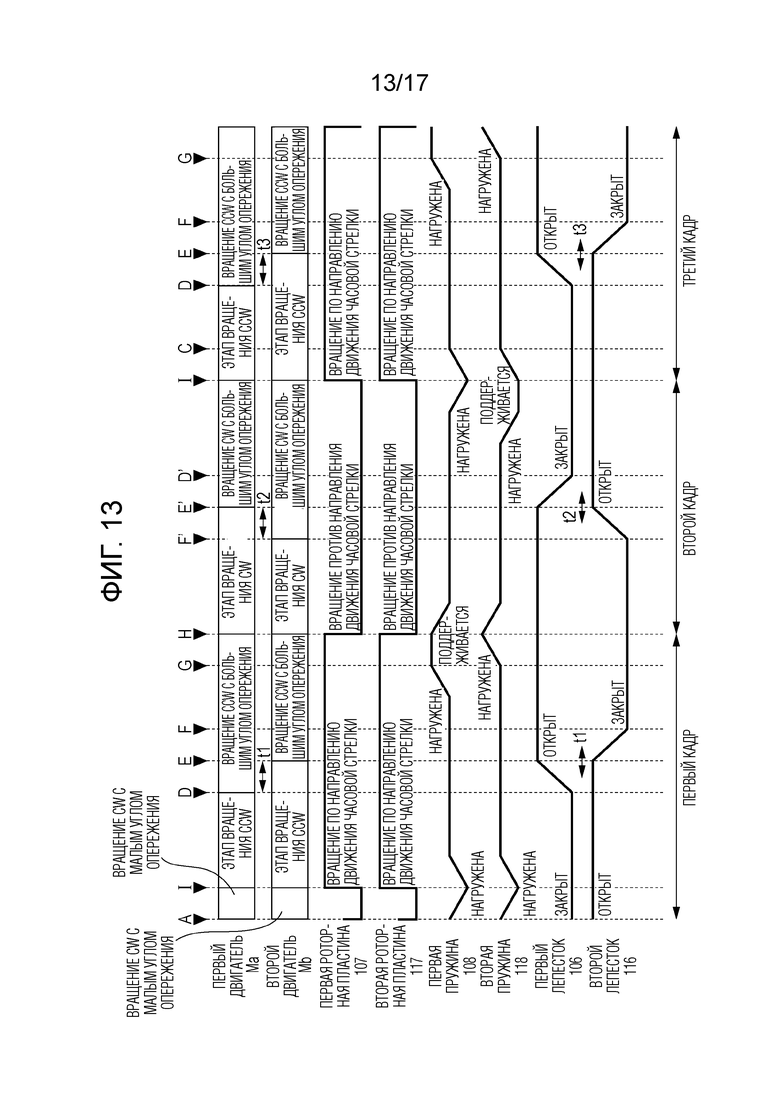
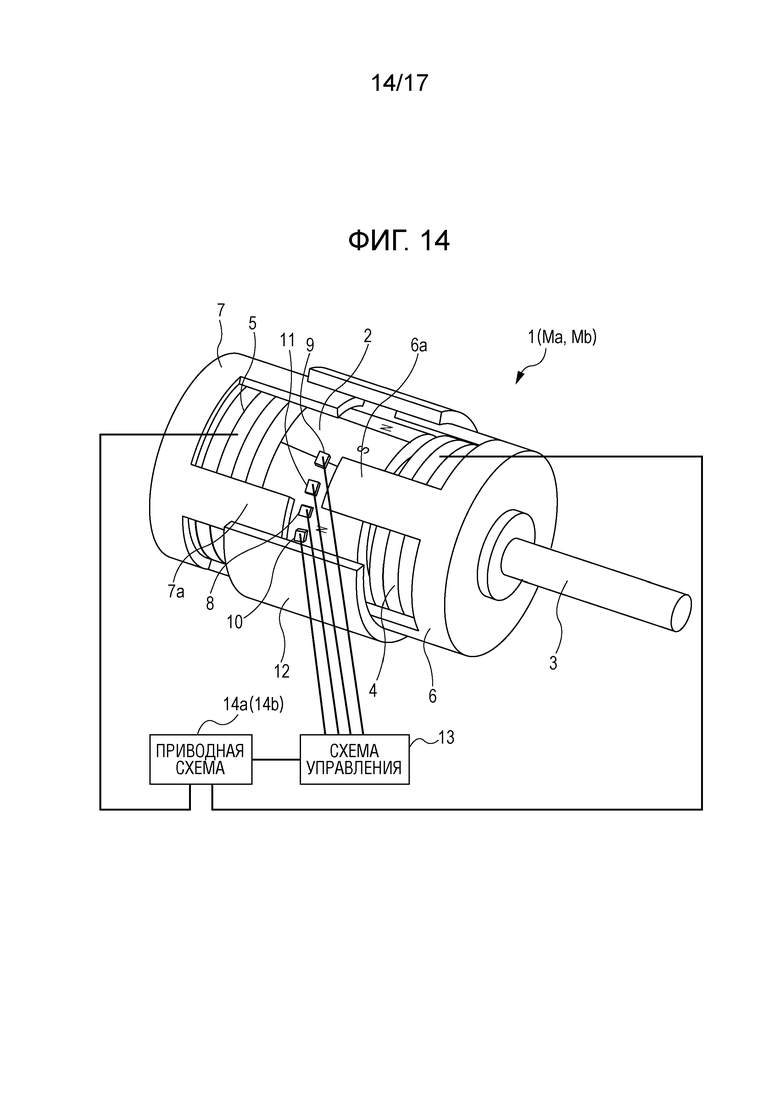
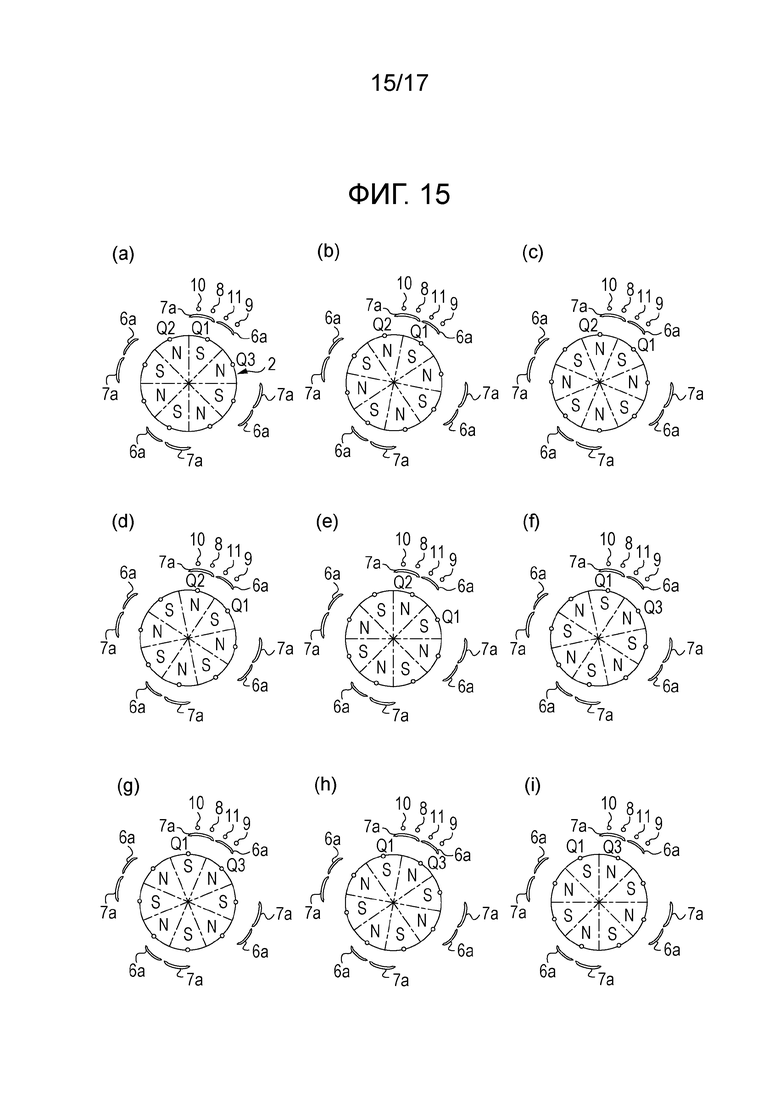
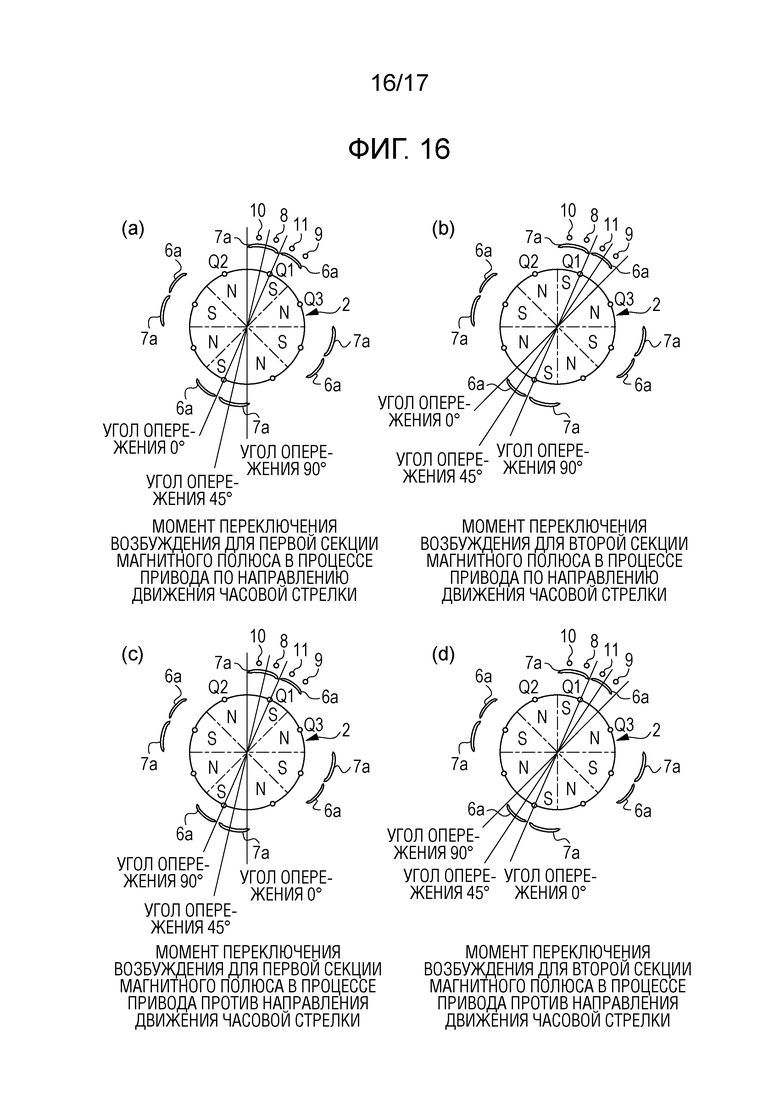
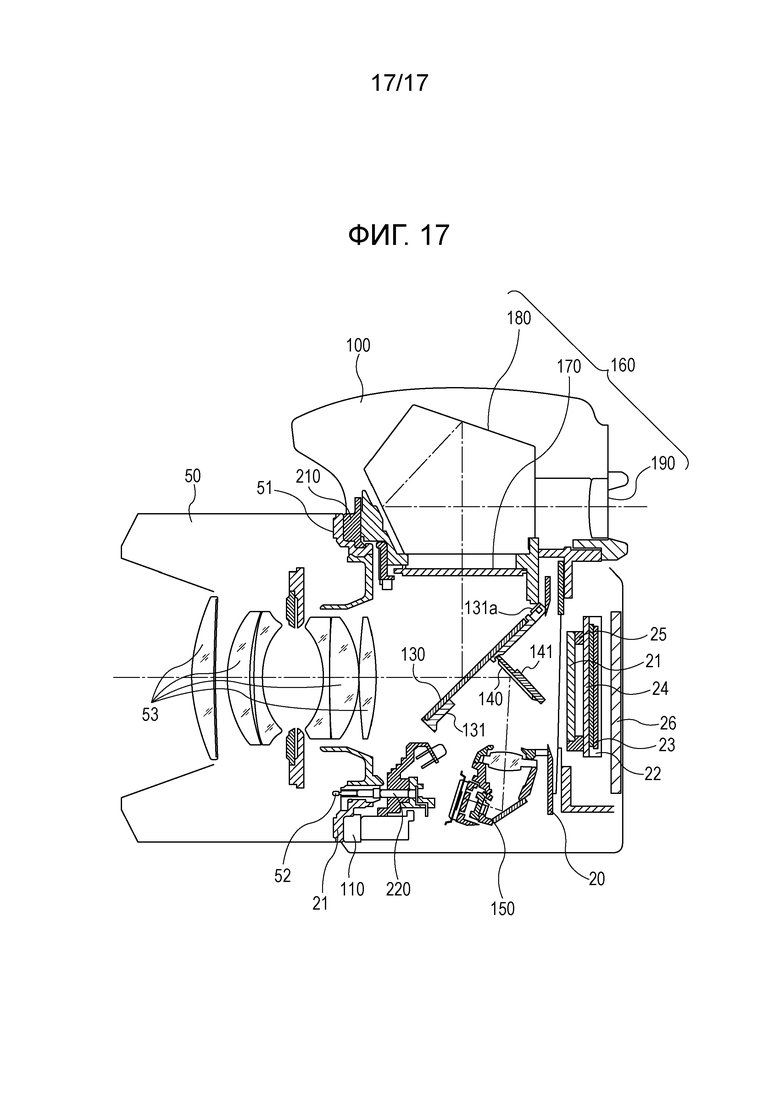
Настоящее изобретение относится к устройству затвора и устройству захвата изображения, включающему в себя устройство затвора. Заявленное устройство затвора содержит шаговый двигатель, выполненный с возможностью приведения его в движение в режиме привода без обратной связи, в котором состояние энергоснабжения контура переключается через заданные интервалы времени, и в режиме привода с обратной связью, в котором состояние энергоснабжения контура переключается в соответствии с позицией вращения ротора; ведомый элемент, выполненный с возможностью приведения его в движение посредством шагового двигателя; и светоизолирующий элемент, выполненный с возможностью перемещения в закрытое состояние, в котором апертурная диафрагма закрыта, и в открытое состояние, в котором апертурная диафрагма открыта, в соответствии с приведением в движение ведомого элемента. Причем ведомый элемент выполнен с возможностью его приведения в движение в первой зоне, в которой ведомый элемент приводится в движение посредством шагового двигателя, но светоизолирующий элемент остается в закрытом состоянии или открытом состоянии, и во второй зоне, в которой ведомый элемент приводится в движение посредством шагового двигателя, и, таким образом, светоизолирующий элемент перемещается из закрытого состояния в открытое состояние или из открытого состояния в закрытое состояние. При этом ведомый элемент приводится в движение в первой зоне посредством шагового двигателя в одном направлении, и после приведения в движение ведомого элемента в первой зоне ведомый элемент приводится в движение во второй зоне, в котором в случае, когда ведомый элемент приводится в движение в первой зоне, шаговый двигатель приводит в движение ведомый элемент в режиме привода без обратной связи, и в котором в случае, когда ведомый элемент приводится в движение во второй зоне, шаговый двигатель приводит в движение ведомый элемент в режиме привода с обратной связью. Технический результат - обеспечение устройства затвора, в котором в случае, когда шаговый двигатель приводит в движение ведомый элемент, за счет чего светоизолирующий элемент перемещается из закрытого состояния в открытое состояние или из открытого состояния в закрытое состояние, шаговый двигатель не теряет синхронизацию. 2 н. и 6 з.п. ф-лы, 17 ил.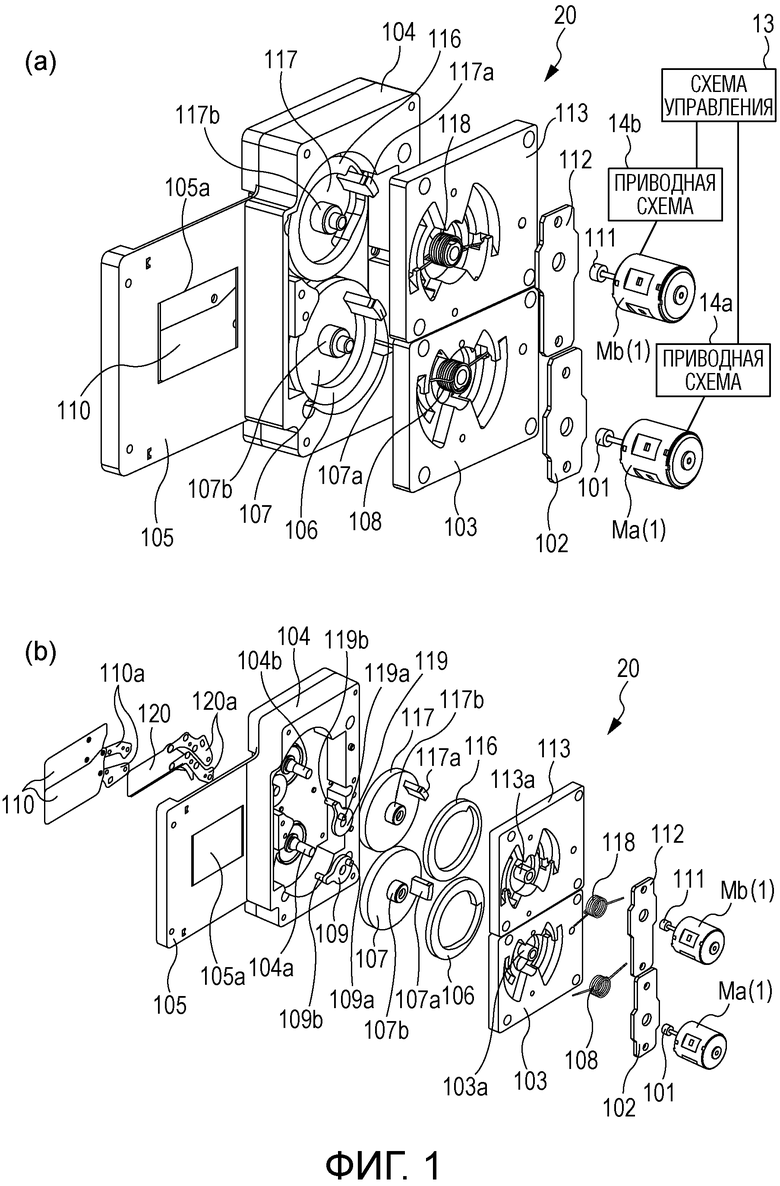
1. Устройство затвора, содержащее:
шаговый двигатель, выполненный с возможностью приведения его в движение в режиме привода без обратной связи, в котором состояние энергоснабжения контура переключается через заданные интервалы времени, и в режиме привода с обратной связью, в котором состояние энергоснабжения контура переключается в соответствии с позицией вращения ротора;
ведомый элемент, выполненный с возможностью приведения его в движение посредством шагового двигателя; и
светоизолирующий элемент, выполненный с возможностью перемещения в закрытое состояние, в котором апертурная диафрагма закрыта, и в открытое состояние, в котором апертурная диафрагма открыта, в соответствии с приведением в движение ведомого элемента,
в котором ведомый элемент выполнен с возможностью его приведения в движение в первой зоне, в которой ведомый элемент приводится в движение посредством шагового двигателя, но светоизолирующий элемент остается в закрытом состоянии или открытом состоянии, и во второй зоне, в которой ведомый элемент приводится в движение посредством шагового двигателя, и, таким образом, светоизолирующий элемент перемещается из закрытого состояния в открытое состояние или из открытого состояния в закрытое состояние,
в котором ведомый элемент приводится в движение в первой зоне посредством шагового двигателя в одном направлении, и после приведения в движение ведомого элемента в первой зоне, ведомый элемент приводится в движение во второй зоне,
в котором в случае, когда ведомый элемент приводится в движение в первой зоне, шаговый двигатель приводит в движение ведомый элемент в режиме привода без обратной связи, и
в котором в случае, когда ведомый элемент приводится в движение во второй зоне, шаговый двигатель приводит в движение ведомый элемент в режиме привода с обратной связью.
2. Устройство затвора по п.1, в котором ведомый элемент является роторной пластиной, имеющей канавку эксцентрика, и
в котором канавка эксцентрика имеет первую область эксцентрика, в которой роторная пластина приводится в движение посредством шагового двигателя, но светоизолирующий элемент остается в закрытом состоянии или открытом состоянии, и вторую область эксцентрика, в которой роторная пластина приводится в движение посредством шагового двигателя, и, таким образом, светоизолирующий элемент перемещается из закрытого состояния в открытое состояние или из открытого состояния в закрытое состояние.
3. Устройство затвора по п.2, в котором роторная пластина включает в себя периферийную часть, к которой крепится грузик.
4. Устройство затвора по любому из пп.1-3, дополнительно содержащее принуждающий элемент, выполненный с возможностью принуждения ведомого элемента,
при этом, перед приведением в движение ведомого элемента в первой зоне, шаговый двигатель нагружает принуждающий элемент посредством приведения в движение ведомого элемента в режиме привода с обратной связью, и
в случае, когда ведомый элемент приводится в движение в первой зоне, принуждающий элемент принуждает ведомый элемент.
5. Устройство затвора по п.4, в котором шаговый двигатель выполнен с возможностью его приведения в движение в первом режиме привода с обратной связью, в котором величина угла опережения является малой, и во втором режиме привода с обратной связью, в котором величина угла опережения является большой,
в котором, перед приведением в движение ведомого элемента в первой зоне, шаговый двигатель нагружает принуждающий элемент посредством приведения в движение ведомого элемента в первом режиме привода с обратной связью, и
в котором в случае, когда ведомый элемент приводится в движение во второй зоне, шаговый двигатель приводит в движение ведомый элемент во втором режиме привода с обратной связью.
6. Устройство затвора по п.5, в котором ведомый элемент выполнен с возможностью приведения его в движение в третьей зоне, в которой, после приведения в движение ведомого элемента во второй зоне, ведомый элемент приводится в движение посредством шагового двигателя, но светоизолирующий элемент остается в закрытом состоянии или открытом состоянии, и
в котором в случае, когда ведомый элемент приводится в движение в третьей зоне, шаговый двигатель нагружает принуждающий элемент посредством приведения в движение ведомого элемента во втором режиме привода с обратной связью.
7. Устройство затвора по п.6, в котором в случае, когда ведомый элемент приводится в движение в третьей зоне, и нагружается принуждающий элемент, шаговый двигатель поддерживает электроснабжение.
8. Устройство захвата изображения, содержащее устройство затвора по п.1.
| US 4325614 A, 20.04.1982 | |||
| ДИФФЕРЕНЦИАЛЬНЫЙ УСИЛИТЕЛЬ | 2005 |
|
RU2283533C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ КИНЕТИКИ ТРЕЩИН | 0 |
|
SU243227A1 |
| US 2004057705 A1, 25.03.2004 | |||
| US 3733991 A, 22.05.1973. | |||

