Изобретение относится к области беспилотных летательных аппаратов и предназначено для натурной отработки их систем самонаведения.
Из уровня техники известен способ имитации ракеты (патент RU 2422910, МПК G09B 19/00, G06F 11/28, F41F 3/04), при котором размещают учебно-летную ракету на авиационном носителе, подключают через бортразъем к аппаратуре носителя, во время полета носителя подают питание на бортразъем учебно-летной ракеты, имитируют пуск, функционирование и токопотребление ракеты, записывают информационный обмен учебно-летной ракеты с аппаратурой носителя и проводят послеполетный анализ. Недостатком данного способа является недостаточно полная имитация функционирования ракеты из-за отсутствия возможности проверки работы системы самонаведения в автономном полете.
Задачей предлагаемого изобретения является устранение указанного выше недостатка и создание способа имитации беспилотного летательного аппарата для отработки системы самонаведения при проведении летных испытаний, позволяющего отработать логику функционирования и информационное взаимодействие его подсистем.
Поставленная задача решается за счет того, что имитацию беспилотного летательного аппарата для отработки системы самонаведения при проведении летных испытаний осуществляют следующим образом: размещают имитатор беспилотного летательного аппарата на авиационном носителе, подключают бортразъем имитатора беспилотного летательного аппарата к аппаратуре носителя, подают питание на бортразъем имитатора беспилотного летательного аппарата, в момент начала эксперимента производят имитацию пуска, имитируют функционирование и токопотребление беспилотного летательного аппарата, записывают информационный обмен на внутреннее запоминающее устройство, при этом перед полетом авиационного носителя с помощью модуля программатора проводят предстартовый контроль беспилотного летательного аппарата, перед имитацией пуска задают полетное задание, включают систему самонаведения и выставляют инерциальную систему управления, полет авиационного носителя осуществляют по траектории, приближенной к заданной для беспилотного летательного аппарата с штатной работой системы самонаведения и инерциальной системы управления беспилотного летательного аппарата, с помощью внутреннего записывающего устройства регистрируют телеметрическую информацию, после полета производят обработку и анализ записанной информации.
В первом частном случае задача изобретения решается за счет того, что в полетном задании задают траекторию полета авиационного носителя после имитации пуска беспилотного летательного аппарата с различными углами места относительно морской цели, при этом с помощью системы наведения дополнительно обнаруживают и сопровождают морскую цель, компенсируют помеховое отражение от морской поверхности.
Во втором частном случае задача изобретения решается за счет того, что в полетном задании задают траекторию полета авиационного носителя после имитации пуска беспилотного летательного аппарата с различными углами промаха по азимуту относительно морской цели, при этом дополнительно реализуют режим работы системы наведения с синтезированной апертурой.
Сущность изобретения поясняется чертежами, на которых представлены:
фиг. 1 - структурная схема устройства для реализации способа имитации беспилотного летательного аппарата для проверки системы самонаведения при проведении летных испытаний;
фиг. 2 - траектория полета авиационного носителя с размещенным на нем устройством имитации беспилотного летательного аппарата.
На фиг. 1 обозначены:
1 - авиационный носитель;
2 - корпус имитатора беспилотного летательного аппарата;
3 - система самонаведения;
4 - инерциальная система управления;
5 - внутреннее запоминающее устройство;
6 - модуль программатора;
7 - контрольный разъем;
8 - бортовой разъем;
На фиг. 2 обозначены участки траектории полета авиационного носителя (а - при высотном полете и пикировании; b - при полете на небольшой высоте);
I - вылет авиационного носителя;
II - выход авиационного носителя к точке начала эксперимента;
III - выставка ИСУ;
IV - поиск, выбор, захват и автосопровождение цели при высотном полете и автосопровождение цели при пикировании;
V - поиск, выбор, захват и автосопровождение цели при полете на небольшой высоте.
Способ имитации беспилотного летательного аппарата (БПЛА) для отработки системы самонаведения при проведении летных испытаний осуществляют следующим образом. Размещают имитатор БПЛА на авиационном носителе 1, подключают бортовой разъем 8 имитатора БПЛА к аппаратуре носителя. Перед полетом авиационного носителя подают питание на бортовой разъем 8 имитатора БПЛА 1, затем с помощью модуля программатора 6 через контрольный разъем 7 проводят предстартовый контроль БПЛА, задают полетное задание. Перед имитацией пуска включают систему самонаведения 3 и выставляют инерциальную систему управления (ИСУ) 4. В момент начала эксперимента производят имитацию пуска, имитируют функционирование и токопотребление БПЛА. Полет авиационного носителя 1 осуществляют по траектории, приближенной к заданной для БПЛА. ИСУ 4 и система самонаведения 3 с входящей в ее состав головкой самонаведения (ГСН) работают в штатном режиме, т.е. в соответствии с логикой функционирования в условиях реального полета без ограничений, накладываемых в условиях лабораторных испытаний. Информационный обмен и телеметрическую информацию записывают на внутреннее запоминающее устройство (ВЗУ) 5. После полета производят обработку и анализ записанной информации и оценку вероятностей обнаружения, захвата и автосопровождения цели. Проверяют правильность работы ГСН, в том числе соответствие видов модуляции сигналов ГСН режимам работы, на основе полученных данных регулируют мощность излучаемого сигнала в зависимости от дальности до цели.
При реализации способа для компенсации помехового отражения от морской поверхности при различных углах наблюдения цели возможно осуществление обнаружения и сопровождения морской цели, например корабля, при состоянии моря от 1 до 6 баллов по траекториям а и b. Это позволяет настроить пороги обнаружения для различных дальностей и углов места наблюдения цели (скомпенсировать помеховое отражение от морской поверхности при волнении моря от 1 до 6 баллов) по траекториям а и b.
При реализации способа для повышения разрешающей способности ГСН не только по дальности, но и по азимуту возможно осуществление режима работы ГСН с синтезированной апертурой, который невозможно отработать в лабораторных условиях. Для этого авиационный носитель 1 совершает полет с различными углами промаха по азимуту при волнении моря от 1 до 6 баллов по траекториям а и b. После осуществления данного режима выбирают оптимальную траекторию и скорость подхода к цели для режима с синтезированной апертурой.
Для отработки систем самонаведения разрабатываемых перспективных БПЛА кроме математического и полунатурного моделирования, позволяющих отработать логику функционирования и информационное взаимодействие подсистем, необходимо проводить натурные испытания. Натурные испытания являются самым дорогостоящим видом испытаний в связи с высокой ценой одного полета авиационного носителя (от 2,5 до 6 млн. руб.). Также есть сложности с натурной отработкой ГСН для разрабатываемых БПЛА внутрифюзеляжного размещения.
Способ позволяет отработать и настроить пороги обнаружения для различных дальностей и углов подхода к цели; работу подсистем ГСН; различные виды модуляции сигналов ГСН в зависимости от режима работы; режим синтезированной апертуры для радиолокационных ГСН; режим регулировки мощности в зависимости от дальности. Способ также позволяет проверить коллективную работу ГСН для обеспечения электромагнитной совместимости.
Способ может быть реализован с помощью устройства имитации БПЛА, состоящего из корпуса БПЛА (может быть использован корпус серийной ракеты), имеющего точки подвески для размещения под крылом или под фюзеляжем авиационного носителя 1 с размещенными в корпусе ИСУ 4 и системой наведения 3, включающей в себя ГСН разрабатываемого БПЛА и размещенными на корпусе контрольным разъемом 7 и бортовым разъемом 8. Также в корпусе размещено ВЗУ 5, на которое по технологической линии Ethernet записывают данные информационного обмена и телеметрическую информацию. Модуль программатора 6 используют для формирования полетного задания, проведения предстартового контроля устройства имитации и электронного пуска через контрольный разъем 7. После посадки авиационного носителя 1 к внутреннему запоминающему устройству через контрольный разъем подключают ноутбук, на который переписывают телеметрическую информацию (в том числе первичную радиолокационную информацию) для последующего анализа.
В качестве авиационного носителя 1 может быть использован, например, Су-24М, имеющий точки подвески для авиационной противокорабельной ракеты, например Х-31, корпус которой может быть использован для устройства имитации. Способ может быть использован для отработки систем наведения БПЛА, размещаемых на любых носителях (авиационных, корабельных и других), в частности, для отработки головок самонаведения БПЛА внутрифюзеляжного размещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК СИСТЕМЫ САМОНАВЕДЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2830544C1 |
| СПОСОБ ПРОВЕРКИ ЭЛЕКТРИЧЕСКОГО И ИНФОРМАЦИОННОГО ОБМЕНА РАКЕТЫ | 2012 |
|
RU2499979C1 |
| СПОСОБ ИСПЫТАНИЯ СИСТЕМ ОБНАРУЖЕНИЯ КАНАЛА УПРАВЛЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ОХРАНЯЕМЫХ ОБЪЕКТАХ | 2023 |
|
RU2821601C1 |
| Способ испытания систем радиоэлектронного подавления беспилотных летательных аппаратов | 2023 |
|
RU2817392C1 |
| УСТРОЙСТВО ИМИТАЦИИ АППАРАТУРЫ НОСИТЕЛЯ ДЛЯ КОНТРОЛЯ ИНФОРМАЦИОННОГО ОБМЕНА С РАКЕТОЙ | 2011 |
|
RU2440607C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСЛОВИЙ ВОЗМОЖНОГО ПУСКА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2618811C1 |
| Способ формирования мишенного объекта, имитирующего старт воздушной цели в условиях ракетной позиции, аэродрома, необорудованной территории, и устройство для его осуществления | 2019 |
|
RU2759973C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ РАКЕТЫ | 2023 |
|
RU2826814C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2018 |
|
RU2699261C1 |
| СПОСОБ ВОЗДУШНОЙ РАЗВЕДКИ НАЗЕМНЫХ (НАДВОДНЫХ) ОБЪЕКТОВ С ЦЕЛЬЮ ТОПОГЕОДЕЗИЧЕСКОГО, МЕТЕОРОЛОГИЧЕСКОГО И ДРУГИХ ВИДОВ ОБЕСПЕЧЕНИЯ ПУСКОВ (СБРОСОВ) УПРАВЛЯЕМЫХ АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЯ С ПОМОЩЬЮ ОПТИКО-ЭЛЕКТРОННЫХ ГОЛОВОК САМОНАВЕДЕНИЯ | 2020 |
|
RU2771965C1 |

Изобретение относится к способу имитации беспилотного летательного аппарата (БЛА) для отработки системы наведения при проведении летных испытаний. Для этого задают полетное задание с помощью модуля программатора беспилотному летательному аппарату, проводят предстартовый контроль, включают систему наведения, выставляют инерциальную систему управления, размещают имитатор БЛА на авиационном носителе, подключают бортовой разъем имитатора к аппаратуре носителя, подают питание на бортовой разъем имитатора, осуществляют полет авиационного носителя по траектории, приближенной к заданной для БЛА, производят имитацию пуска, функционирования и токопотребления БЛА, записывают информационный обмен на внутреннее запоминающее устройство, регистрируют телеметрическую информацию, производят ее обработку и анализ после полета. Обеспечивается отработка и проверка системы самонаведения при проведении летных испытаний. 2 з.п. ф-лы, 2 ил.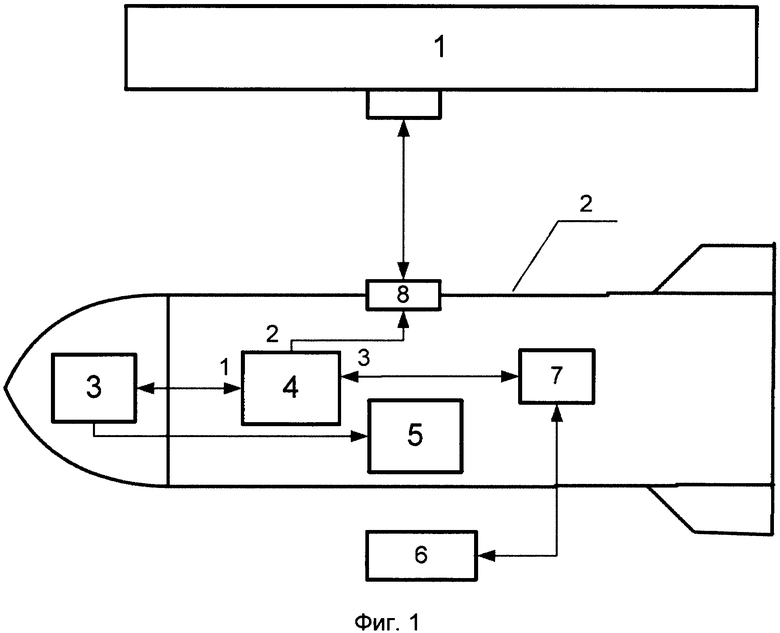
1. Способ имитации беспилотного летательного аппарата для отработки системы наведения при проведении летных испытаний, при котором размещают имитатор беспилотного летательного аппарата на авиационном носителе, подключают бортовой разъем имитатора беспилотного летательного аппарата к аппаратуре носителя, подают питание на бортовой разъем имитатора беспилотного летательного аппарата, в момент начала эксперимента производят имитацию пуска, имитируют функционирование и токопотребление беспилотного летательного аппарата, записывают информационный обмен на внутреннее запоминающее устройство, отличающийся тем, что перед полетом авиационного носителя с помощью модуля программатора задают полетное задание и проводят предстартовый контроль беспилотного летательного аппарата, перед имитацией пуска беспилотного летательного аппарата включают систему самонаведения и выставляют инерциальную систему управления, полет авиационного носителя осуществляют по траектории, приближенной к заданной для беспилотного летательного аппарата с штатной работой системы самонаведения и инерциальной системы управления, с помощью устройства записи информации регистрируют телеметрическую информацию, после полета производят обработку и анализ телеметрической информации.
2. Способ по п. 1, отличающийся тем, что в полетном задании задают траекторию полета авиационного носителя после имитации пуска беспилотного летательного аппарата с различными углами места относительно морской цели, при этом с помощью системы наведения дополнительно обнаруживают и сопровождают морскую цель, компенсируют помеховое отражение от морской поверхности.
3. Способ по пп. 1, 2, отличающийся тем, что в полетном задании задают траекторию полета авиационного носителя после имитации пуска беспилотного летательного аппарата с различными углами промаха по азимуту относительно морской цели, при этом дополнительно реализуют режим работы системы наведения с синтезированной апертурой.
| СПОСОБ ОБУЧЕНИЯ ЛЕТНОГО СОСТАВА С ИСПОЛЬЗОВАНИЕМ В КАЧЕСТВЕ ТРЕНАЖЕРА УЧЕБНО-ЛЕТНОЙ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ЛЕТНОГО СОСТАВА В ВИДЕ УЧЕБНО-ЛЕТНОЙ РАКЕТЫ | 2009 |
|
RU2422910C2 |
| СПОСОБ ПРОВЕДЕНИЯ НАТУРНО-МОДЕЛЬНЫХ ИСПЫТАНИЙ РАДИОЭЛЕКТРОННЫХ СИСТЕМ | 1997 |
|
RU2137193C1 |
| УЧЕБНАЯ АВИАЦИОННАЯ БОМБА С СИСТЕМОЙ ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ НАВИГАЦИИ | 2006 |
|
RU2319102C1 |
| СПОСОБ ПРОВЕРКИ ЭЛЕКТРИЧЕСКОГО И ИНФОРМАЦИОННОГО ОБМЕНА РАКЕТЫ | 2012 |
|
RU2499979C1 |

