Способ относится к области испытаний беспилотных летательных аппаратов, оснащенных системой самонаведения, в том числе может быть использован для определения их показателей эффективности и эксплуатационных характеристик на основе технологии «цифровых двойников», путем создания цифрового испытательного полигона, имитирующего условия внешней среды функционирования объекта испытаний, в т.ч. внешние и деструктивно воздействующие на него факторы и цифрового двойника имитирующего реальный полет беспилотного летательного аппарата и функционирование его системы самонаведения в различных условиях, что позволяет сократить число натурных экспериментов при заданных точности и достоверности оценок определяемых показателей эффективности и эксплуатационных характеристик, а также расширяет диапазон условий проведения испытаний, включая те условия обстановки, в которых проверка качества функционирования невозможна или связана со значительными затратами ресурсов.
Толкование терминов, используемых в заявке
Беспилотный летательный аппарат (БПЛА) - беспилотное воздушное судно, выполняющее полет с целевой нагрузкой без пилота на борту (ГОСТ РВ 0101-002-2018).
Системой самонаведения (ССН) - комплекс приборов, устанавливаемых на БПЛА, предназначенных для автоматического управления летательным аппаратом с целью привести его к заданной цели. В состав ССН обычно входят датчики истинного положения летательного аппарата в пространстве (гироскопические, инерциальные или другие координатные устройства), а также датчики сигналов, предназначенные для формирования управляющих воздействий на исполнительные механизмы и изменения положения БПЛА в пространстве (Лентовский В.В., Князева Т.Н., Герт А.В., Васильева Л.И. Системы ориентации и наведения беспилотных летательных аппаратов: Учебное пособие. СПб.: БГТУ «Военмех», 2019. - 87 с., стр. 7).
Станция помех радиоэлектронным средствам - техническое устройство для создания активных помех в целях исключения или существенного затруднения использования противником радиоэлектронных средств связи, локации, навигации, телеуправления, наведения оружием (Плехов A.M., Шапкин С.Г. Словарь военных терминов. Москва: Воениздат, 1988. - 335 с., стр. 136).
Радиоэлектронные (активные) помехи - электромагнитные излучения, создаваемые источником радиоволн, затрудняющие или исключающие прием полезных сигналов радиоэлектронными средствам объекта на который осуществляется воздействие (Гасанов С.Э., Богатырев А.А., Мищенко Ю.М. Активные шумовые помехи и их характеристики в области радиолокации: обзорная статья. Аллея науки №4 (43). ЯВВУ ПВО, 2020. стр. 29-34).
Условия эксплуатации - реальные условия, в которых находится аппаратура при ее эксплуатации (хранении, транспортировании, применении по назначению), определяемые окружающей средой и особенностями эксплуатации и указанные в нормативных документах на аппаратуру (ГОСТ РВ 0020-39.304-2019, п. 3.4, стр. 6).
Внешний воздействующий фактор - внешний фактор, который может оказывать воздействие или влияние на характеристики системы, (в соответствии с ГОСТ 26883-86: «Внешний воздействующий фактор (ВВФ) - Явление, процесс или среда, внешние по отношению к изделию или его составным частям, которые вызывают или могут вызвать ограничение или потерю работоспособного состояния изделия в процессе эксплуатации»).
Испытания - экспериментальное определение количественных и (или) качественных характеристик свойств объекта испытаний как результата воздействия на него, при его функционировании, при моделировании объекта и (или) воздействий (ГОСТ 16504-81, п. 1, стр. 3).
Натурный эксперимент - научно поставленный опыт над изделием или его составными частями, который проводится на реальных объектах и в условиях, соответствующих условиям его эксплуатации по прямому назначению с непосредственным оцениванием или контролем определяемых характеристик свойств объекта (ГОСТ Р 57700.25-2020, п. 3.1.6, стр. 8).
Оценка соответствия - деятельность, связанная с прямым или косвенным определением того, что соответствующие требования к изделию выполняются (ГОСТ РВ 15.201-2003, п. 3.1.4, стр. 4).
Оценивание показателей - совокупность операций, включающих выбор оцениваемых показателей, определение значений этих показателей с указанием точности и (или) достоверности (ОТТ 1.2.9 - 2005. Системы и комплексы (образцы) вооружения и военной техники. Требования к методам испытаний и контроля характеристик эксплуатации, хранения, удобства технического обслуживания и ремонта, стр. 35).
Точность (доверительный интервал) - степень совпадения оценки некоторой величины или параметра с его истинным значением. Точность характеризуется погрешностью или степенью воспроизводимости (Макаренко С.И. Справочник научных терминов и обозначений. - СПб.: Наукоемкие технологии, 2019. - 254 с. стр. - 154).
Достоверность (доверительная вероятность) - характеристика, показывающая, в какой мере полученный результат соответствует истинной величине (справедлив в отношении данной выборки) (Матвейчук Ф.А. Справочник по исследованию операций. Москва.: Воениздат, 1979. - 368 с, стр. 14).
Цифровой двойник изделия (ЦД) - система, состоящая из цифровой модели изделия и двусторонних информационных связей с изделием (при наличии изделия) и (или) его составными частями (ГОСТ Р 57700.37-2021, п. 3.24, стр. 6).
Цифровой (виртуальный) испытательный полигон: Система, в общем случае состоящая из технических средств, программного, методического и организационного обеспечения и квалифицированного персонала, предназначенная для проведения полигонных испытаний как результата исследования свойств цифровой модели (или цифрового двойника) объекта испытаний (ГОСТ Р 57700.37-2021, п. 3.25, стр. 6).
Технические характеристики систем самонаведения (ССН) беспилотных летательных аппаратов оцениваются показателями эффективности и эксплуатационными характеристиками их функционирования (вероятностью обнаружения, распознавания, устойчивости сопровождения до поражения цели, точностными характеристиками ССН в беспомеховой обстановке и в условиях воздействия деструктивных факторов, надежностью, и т.д.). На основе полученных данных о функционировании испытательных средств и объекта испытаний, а также о условиях проведения испытаний.
В качестве аналога заявляемого изобретения выбран способ проведения натурно-модельных испытаний радиоэлектронных систем (патент RU 2137193 С1 от 10.09.1999), включающий имитационное моделирование и натурный эксперимент, при котором испытываемую радиоэлектронную систему, контрольно-измерительную и записывающую аппаратуру устанавливают на первом летательном аппарате (ЛА), например самолете-летающей лаборатории, средства воздействия на испытываемую радиоэлектронную систему и взаимодействия с ней устанавливают на втором летательном аппарате, производят полет обоих летательных аппаратов, в течение реального времени работы испытываемой радиоэлектронной системы излучают радиосигналы этой системы и радиосигналы, воздействующие на нее, на первом летательном аппарате принимают радиосигналы, отраженные от второго летательного аппарата, и радиосигналы, воздействующие на испытываемую радиоэлектронную систему, регистрируют сигналы, принимаемые радиоэлектронной системой, и сигналы датчиков параметров первого и второго летательных аппаратов, производят обработку всех принятых сигналов, на основе которой определяют фазовые координаты системы в составе первого и второго летательных аппаратов, эти фазовые координаты используют в качестве входных данных при имитационном моделировании, в результате которого получают сигналы, пропорциональные величинам показателей эффективности функционирования испытываемой радиоэлектронной системы, полет первого летательного аппарата производят в предварительно определенной области физического пространства с выдерживанием заданного диапазона угловых скоростей линии визирования второго летательного аппарата и осуществляют периодические сближения первого летательного аппарата со вторым, при этом измеряют траекторные параметры летательных аппаратов, а прием и регистрацию выходных сигналов испытываемой радиоэлектронной системы производят только в те отрезки времени, когда фазовые координаты первого летательного аппарата совпадают с аналогичными координатами для реального носителя данной радиоэлектронной системы, патент RU 2137193 С1 (опубл. 10.09.1999).
Недостаток аналога заключается, в недостаточно полной имитации функционирования испытываемых средств, а именно в том, что в имитационной модели не учитывается влияние всего комплекса внешних и деструктивно воздействующих факторов.
Наиболее близким техническим решением к заявляемому изобретению (прототипом) является способ имитации беспилотного летательного аппарата для отработки системы самонаведения при проведении летных испытаний (патент RU 2636430 С1 от 10.08.2016), заключающийся, в том, что задают полетное задание с помощью модуля программатора беспилотному летательному аппарату, проводят предстартовый контроль, включают систему наведения, выставляют инерциальную систему управления, размещают имитатор БПЛА на авиационном носителе, подключают бортовой разъем имитатора к аппаратуре носителя, подают питание на бортовой разъем имитатора, осуществляют полет авиационного носителя по траектории, приближенной к заданной для БПЛА, производят имитацию пуска, функционирования и токопотребления БПЛА, записывают информационный обмен на внутреннее запоминающее устройство, регистрируют телеметрическую информацию, производят ее обработку и анализ после полета. Реализация данного способа обеспечивает отработку и проверку функционирования системы самонаведения при проведении летных испытаний. Недостатком данного способа является отсутствие учета всех факторов, влияющих на состояние системы и представление только текущего состояния системы.
Недостатком прототипа является его ограниченная область использования и дает представление только о текущем состоянии системы. Прототип не позволяет учесть всего комплекса внешних и деструктивно воздействующих факторов на функционирование системы самонаведения, например внешних метеорологических условий и влияния средств противодействия, в том числе активных радиоэлектронных помех, не учитывается изменение параметров фоно-целевой обстановки.
Для определения показателей эффективности и эксплуатационных характеристик испытываемых изделий, проявляемых в различных условиях функционирования с заданной точностью и достоверностью, требуется проведения дополнительных натурных экспериментов.
Раскрытие темы
а) Техническая задача
Технической задачей изобретения является создание способа определения характеристик системы самонаведения беспилотных летательных аппаратов (далее - ССН БПЛА), обеспечивающего сокращение числа натурных экспериментов и времени, необходимых для оценки показателей эффективности и эксплуатационных характеристик ССН БПЛА в различных условиях решаемых ими задач, с заданными значениями точности и достоверности за счет реализации теоретико-экспериментального метода оценивания.
б) Совокупность существенных признаков
Поставленная техническая задача достигается тем, что в способ определения характеристик системы самонаведения беспилотных летательных аппаратов, при котором имитатор БПЛА размещают на авиационном носителе, подключают бортовой разъем имитатора БПЛА к аппаратуре носителя, подают питание на бортовой разъем имитатора БПЛА. В момент начала эксперимента производят имитацию пуска, имитируют функционирование и токопотребление БПЛА, записывают информационный обмен на внутреннее запоминающее устройство. Перед полетом авиационного носителя с помощью модуля программатора задают полетное задание, проводят предстартовый контроль БПЛА. В полетном задании задают траекторию полета авиационного носителя после имитации пуска БПЛА с различными углами места относительно цели, при этом с помощью системы наведения обнаруживают и сопровождают цель, компенсируют помеховое отражение от поверхности. Так же вводят полетное задание авиационного носителя с различными углами промаха по азимуту относительно цели, реализуют режим работы системы наведения с синтезированной апертурой. Перед имитацией пуска БПЛА включают ССН и выставляют инерциальную систему управления. Полет авиационного носителя осуществляют по траектории, приближенной к заданной для БПЛА с штатной работой ССН и инерциальной системы управления, с помощью устройства записи информации регистрируют телеметрическую информацию. После полета производят обработку и анализ телеметрической информации.
Дополнительно введены наземная станция помех для осуществления радиоэлектронного воздействия (деструктивно воздействующих факторов (ДВФ)), комплект датчиков, размещаемых на имитаторе БПЛА, для оценки значения конструктивных параметров ССН БПЛА, влияющие на его показатели эффективности и эксплуатационные характеристик, аппаратно-программный комплекс, обеспечивающего сбор и обобщение результатов испытаний и цифровой вычислительный комплекс, формирующий цифровой полигон и цифрой двойник объекта испытаний.
Совокупность представленных устройств позволяет на основании априорной информации сформировать цифровой двойник (ЦД) ССН БПЛА и задать параметры цифрового полигона (ЦП), а за счет информации полученных в ходе первого натурного эксперимента данных, уточнять параметры ЦД и ЦП и в дальнейшем осуществлять виртуальный эксперимент с последующим анализом процессов функционирования ССН БПЛА и измерением значений показателей эффективности испытываемой системы самонаведения в различных условиях без проведения дополнительных натурных испытаний.
в) Причинно-следственная связь между признаками и техническим результатом
Техническим результатом заявляемого изобретения является сокращение времени и числа натурных экспериментов при выполнении требований по точности и достоверности оценок определяемых показателей эффективности и эксплуатационных характеристик ССН БПЛА в различных условиях решаемых задач с учетом внешних воздействующих факторов и деструктивно воздействующих факторов (ВДВФ).
Доказательства соответствия заявляемого способа условиям патентоспособности «новизна» и «изобретательский уровень»
Проведенный анализ позволил установить, что аналоги, тождественные признакам заявленного способа отсутствуют, что указывает на соответствие заявленного способа условию патентоспособности «новизна».
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного объекта, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
«Промышленная применимость» способа обусловлена наличием элементной базы, на основе которой могут быть выполнены устройства, реализующие данный способ с достижением указанного в изобретении назначения.
Краткое описание чертежей
Заявленный способ поясняется чертежами, на которых показаны:
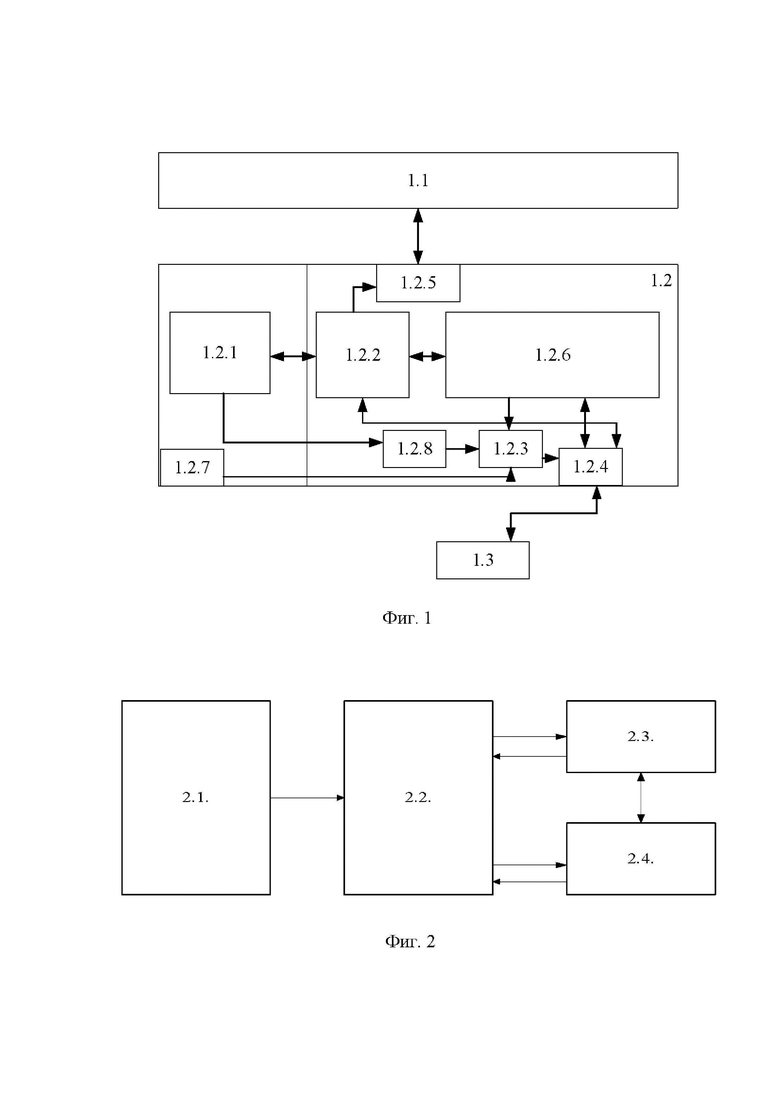
фиг. 1 - структурная схема устройства для реализации натурного эксперимента для определения показателей эффективности и эксплуатационных характеристик ССН БПЛА при проведении летных испытаний;
фиг. 2 - общая схема решения задачи определения характеристик ССН БПЛА по результатам натурных экспериментов с использованием результатов теоретических исследований представлена.
На фиг. 1 обозначены:
1.1. - авиационный носитель;
1.2. - имитатор беспилотного летательного аппарата (БПЛА);
1.2.1. - система самонаведения (ССН);
1.2.2. - инерциальная система управления (ИСУ);
1.2.3. - блок беспроводной передачи данных;
1.2.4. - контрольный разъем;
1.2.5. - бортовой разъем;
1.2.6. - модуль имитации функционирования основных узлов и агрегатов беспилотного летательного аппарата;
1.2.7. - датчики фиксации внешних воздействующих факторов;
1.2.8. - модуль измерений значений параметров функционирования системы самонаведения в различных режимах работы (поиска, распознавания, захвата, сопровождения, отказа);
1.3 - модуль программатора.
На фиг. 2 обозначены:
2.1. - имитатор БПЛА с ССН на авиационном носителе;
2.2. - аппаратно-программный комплекс;
2.3. - цифровой полигон;
2.4. - цифровой двойник БПЛА с ССН.
Осуществление способа
Наиболее важным источником информации для оценки характеристик ССН БПЛА, безусловно, являются результаты натурных испытаний, поскольку они содержат менее искаженную информацию о средстве. Натурные эксперименты производятся как с самой системой, так и с ее отдельными элементами или подсистемами (совокупностями элементов) при специальных видах воздействий или при тех случайных воздействиях, которые имеют место в реальных условиях функционирования средства. В процессе натурных экспериментов, как правило, осуществляется изменение и уточнение параметров средства, в том числе за счет отбраковки части данных.
Вторым источником информации являются теоретические исследования ССН БПЛА, в ходе которых исследуется вся априорная информация и в результате могут быть получены с различной степенью достоверности модели элементов и изделия в целом, описание части или всех воздействий на них. Для этого привлекаются и сведения об образцах прототипах и аналогах, результаты исследований, проведенные с аналогичными элементами и системами.
Информация, содержащаяся в предварительных теоретических исследованиях, совместно с частью информации, полученной при натурных экспериментах, трансформируется в модель функционирования ССН БПЛА - ее цифровой двойник. В результате теоретических исследований самой модели может быть получена, в свою очередь, дополнительная информация о ССН БПЛА. Следовательно, третьим источником информации, по существу, полностью использующим информацию второго источника и частично первого, являются теоретические исследования модели функционирования ССН БПЛА.
Особенности исходных данных предполагают ряд возможных вариантов определения характеристик ССН БПЛА непосредственно с помощью модели. В первом случае на модель подаются непосредственно измеренные значения воздействующих факторов, полученные в ходе натурного эксперимента. В результате получаются реализации (выборки) значений оцениваемых характеристик ССН БПЛА, по объему соответствующих количеству натурных экспериментов.
Во втором случае на модель подаются значения воздействующих факторов, сформированные на основе их вероятностных характеристик, найденных, в свою очередь, по измеренным значениям воздействий и априорной информации. Причем, производится достаточно большое количество экспериментов с моделью, чтобы пренебречь ошибками в определении характеристик за счет их конечности.
Общая схема решения задачи определения характеристик ССН БПЛА по результатам натурных экспериментов с использованием результатов теоретических исследований представлена на фиг. 2.
Наземная станция помех включается во время полета носителя с имитатора БПЛА и излучает радиоэлектронные помехи, воздействующие на бортовую радиоэлектронику ССН БПЛА, в направлении траектории полета авиационного носителя.
Датчики измерения внешних и деструктивно воздействующих факторов, размещенные на борту имитатора БПЛА, непрерывно измеряют значения параметров функционирования ССН в различных режимах работы и значения ВДВФ.
На борту БПЛА размещают блок беспроводной передачи данных, создают и развертывают аппаратно-программный комплекс (АПК). Устройство осуществляет прием и обработку полученной информации и наполняет имеющуюся в его составе базу данных, содержащую априорную информацию о результатах предшествующих этапов испытаний и испытаний ранних модификаций изделия.
Информация из базы данных АПК поедается в цифровой вычислительный комплекс, состоящий из модуля формирования цифрового полигона (МФЦП) и модуля формирования цифрового двойника (МФЦД).
МФЦП формирует и имитирует порядок и условия проведения испытаний, моделирует условия испытаний и физических, климатических явлений, топологию позиционного района, мишенного и помехового комплексов, обеспечивает учет данных о значениях ВДВФ и задает параметры фоно-целевой обстановки, воспроизводит во всех вариациях признаки неподвижных и динамично маневрирующих целей, характеристики местности, на которой они располагаются, позволяет варьировать значениями ВДВФ во всех сочетаниях от минимальных до максимальных значений.
МФЦД это параметрическая модель испытываемого изделия и его составных частей, формируемая по заданному алгоритму, на основании информации, содержащейся в БД АПК - данные о значениях параметров функционирования ЦД БПЛА и ССН в различных режимах работы (поиск цели, распознавание цели, захват и сопровождение цели) в зависимости от заданных параметров среды, имитируемой МЦП.
Значения характеристик модели, полученные в первом случае, определяются как статистические, а во втором - как расчетные. Искомая обобщенная характеристика λ представляется в виде математического ожидания некоторой величины R, которая является известной функцией вектора значений X процессов функционирования ССН БПЛА, т.е.
λ=M[R], R=Ψ[Х], X=Х0+ΔХ0,
где Ψ[Х] - некоторая известная функция вектора X;
ΔХ0 - вектор ошибок измерений характеристики средства.
Исходя из независимости ошибок измерений, можно по результатам натурных испытаний вычислить статистическое значение λ* характеристики
 .
.
Обозначая через U0 вектор значений внешних и деструктивно воздействующих факторов на ССН БПЛА, а через ΔU0 - вектор ошибок измерений этих значений, можно записать, что вектор U измеренных значений воздействий будет U=U0+ΔU0.
При условии независимости экспериментов и одинаковости условий их проведения, а также в силу предположения о независимости ошибок измерения, значения U в различных экспериментах будут независимы и подчиняться одному и тому же закону распределения. Реализации значений вектора U, полученные в N экспериментах, обозначаются U1, U2, …, UN.
Таким образом, из натурных экспериментов получаются реализации U1, U2, …, UN и X1, Х2,…, XN.
Реализации U1, U2, …, UN измеренных значений вектора воздействий используются для получения значений характеристики μ цифрового двойника ССН БПЛА Так же как и по отношению к λ, считается, что μ - математическое ожидание от некоторой величины S, представляющей собой какую-либо функцию вектора Y значений параметров функционирования ССН БПЛА, т.е.
μ=M[S], s=Φ[Y],
где Φ[Y] - некоторая известная функция вектора Y.
Для цифрового двойника ССН БПЛА находится два значения характеристики: статистическое μ* и расчетное μ0.
Статистическое значение μ* получается по результатам N экспериментов с цифровым двойником при подаче на него N реализаций измеренных значений внешних и деструктивно воздействующих факторов, характеризуемых вектором U1, U2, …, UN. В силу независимости U1, U2, …, UN значения S1, S2, …, SN также будут независимыми, а поэтому μ* определяется формуле
 .
.
Расчетное значение μ0 характеристик цифрового двойника вычисляется на основе достаточно большого числа реализаций.
Оценка λ0 характеристики средства по натурным экспериментам и результатам теоретических исследований находится с использованием λ*, μ* и μ0. Оценка λ0 должна быть оптимальной в смысле минимума дисперсии в классе линейных несмещенных оценок, т.е.
λ0=аλ*+bμ*+cμ0,
где a, b, с - коэффициенты, выбираемые исходя из минимума дисперсии оценки и ее несмещенности.
Из условия несмещенности оценки:
М[λ0]=аМ[λ*]+bM[μ*]+сМ[μ0],
где а=1, b=-с, подставляя которые в уравнение, получается
λ0=λ*-с(μ*-μ0).
Значение коэффициента с находится исходя из минимума дисперсии k0 оценки λ0. Так как λ*, μ* и μ0 получены в конечном счете через одни и те же воздействия, которые имели место при натурных экспериментах, то их значения между собой коррелированы. Поэтому
 ,
,
где kλλ, kμμ, kμ0μ0 - дисперсии λ*, μ* и μ0;
kλμ, kλμ0, kμμ0 - корреляционные моменты λ*, μ* и μ0.
Значение с, дающее минимум k0, будет определяться выражением
 или
или  ,
,
которое можно записать в более компактном виде
 ,
,
где kRQ - корреляционный момент случайных величин R и Q.
kQQ - дисперсия случайной величины Q, равной Q=S-μ0.
Формула для оценки λ0 принимает вид
 ,
,
где kRQ и kQQ могут быть заменены на их статистические значения k*RQ и k*QQ.
(Пугачев В.Н. Комбинированные методы определения вероятностных характеристик. - М., «Сов. радио», 1973. - 256 с.).
Порядок совместной обработки результатов натурных экспериментов и теоретических исследований испытываемого средства можно представить в виде фиг. 2.
Интерпретируя полученную формулу, можно сделать вывод о том, что разность (μ*-μ0) равна статистической ошибке в определении характеристики μ, которую удается найти благодаря знанию точного значения μ0 путем многократного моделирования процесса функционирования ССН БПЛА при помощи цифрового двойника.
Величина kRQ*kQQ-1(μ*-μ0) представляет собой значение ошибки, пересчитанное для величины λ* и μ*. Для получения оценки λ0 это пересчитанное значение ошибки вычитается из статистического λ*.
В результате оценки характеристика средства λ0 получается более точной, чем статистическое значение λ*. Точность оценки характеристики, полученной по результатам натурных экспериментов и теоретических исследований (виртуальных экспериментов), можно характеризовать ее дисперсией. Дисперсия k0 находится по выражению
 .
.
Выигрыш в точности оценки λ0 от использования результатов теоретических исследований определяется отношением дисперсии значения λ* к дисперсии оценки λ0
 .
.
Для оценки работоспособности предлагаемого способа оценивания характеристик приведен пример. Для этого подобраны гипотетические значения, условно проведенных предварительных натурных экспериментов и значений внешних и деструктивно воздействующих был построен цифровой двойник. Исходные данные для цифрового двойника ССН БПЛА, как множество определяющих факторов, представлены в виде функциональной зависимости
Kп=f(N, М, L, V, Н),
где N, М, L, V, Н - условные факторы, влияющие на функционирование ССН БПЛА.
Данные составляющие отвечают требованиям совместимости, некоррелированности между собой и их совокупность является достаточно полной. Кроме того, каждый из факторов отвечает требованиям однозначности и управляемости в пределах требуемого интервала варьирования.
Факторное пространство, формируется с учетом статистики изменения этих факторов для исследуемой ССН БПЛА. Для рассматриваемого случая факторное пространство определяется: по фактору  - [100-200]; по фактору
- [100-200]; по фактору  - [10-40]; по фактору
- [10-40]; по фактору  - [10-30]; по фактору
- [10-30]; по фактору  - [300-500]; по фактору
- [300-500]; по фактору  - [5000-10000].
- [5000-10000].
Связь между исходными и кодированными переменными задаются исходя из соотношений

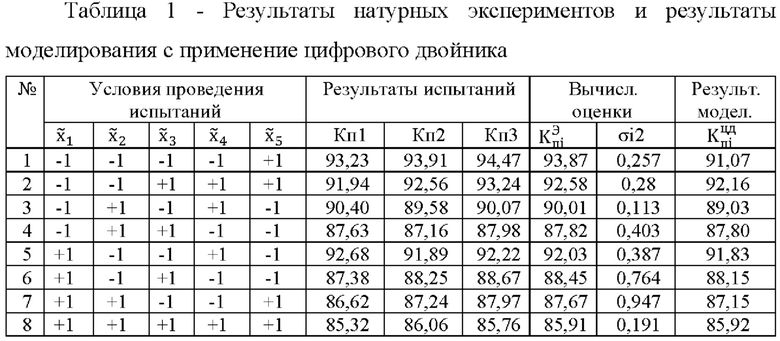
Данная матрица обладает свойствами ортогональности, симметричности и нормировки. Осредненная величина  определялась по данным трех параллельных экспериментов, проведенных в каждой точке плана, приведенных в столбцах Kп1, Kп2, Kп3.
определялась по данным трех параллельных экспериментов, проведенных в каждой точке плана, приведенных в столбцах Kп1, Kп2, Kп3.
После расчета коэффициентов регрессии уравнение регрессии примет вид:
Kп=89,79-1,27x1-1,94х2-1,1х3+0,34х4+0,215х5.
Для оценки воспроизводимости результатов испытаний производится расчет значения критерия Кохрена
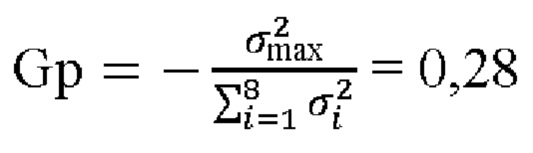
и сравнивается с критическим значением Gкр(ν1, ν2, α)=0,516, выбираемого из таблиц. Сравнивая расчетное и критическое значения критерия Кохрена Gp<Gкр, можно сделать вывод, что с вероятностью 0,95 результаты испытаний ССН БПЛА однородны.
Используя t-критерий Стьюдента, для каждого коэффициента вычисляется расчетное значение tpu (tp1=2,867, tp2=2,888, tp3=2,861, tp4=2,815, tp5=2,819) и сравнивается с его критическим tкр=2,12. В результате сравнения делается вывод, что с вероятностью 0,95 все коэффициенты значимы, следовательно, все факторы оказывают существенное влияние на величину показателя качества ССН БПЛА.
Далее вычисляется дисперсия адекватности
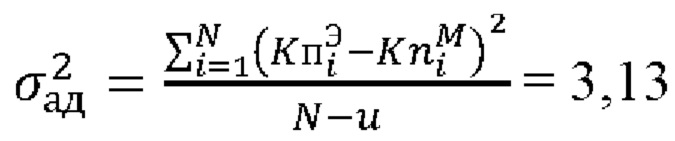 ,
,
где u - количество используемых факторов в модели.
Так как дисперсия адекватности  , то есть основания полагать, что модель адекватно описывает процесс. Кроме того, используя статистику F-критерия, вычисляется его расчетное значение
, то есть основания полагать, что модель адекватно описывает процесс. Кроме того, используя статистику F-критерия, вычисляется его расчетное значение
 ,
,
и определяется Fкр (α, ν1, ν2)=3,60. Так как Fp<Fкр, следовательно, цифровой двойник ССН БПЛА с вероятностью 0,95 считается адекватен, то есть достаточно точно описывает получение показателя качества ССН БПЛА.
Уравнение регрессии представляет из себя математическое описание процесса воздействия различных факторов на ССН БПЛА и используется в цифровом двойнике в качестве инструмента для исследования влияния этих факторов на величину показателя качества. Учитывая выделенный расход ресурса, привлекаемого оборудования, совокупность факторов и условия проведения испытаний, проводится серия зачетных натурных экспериментов.
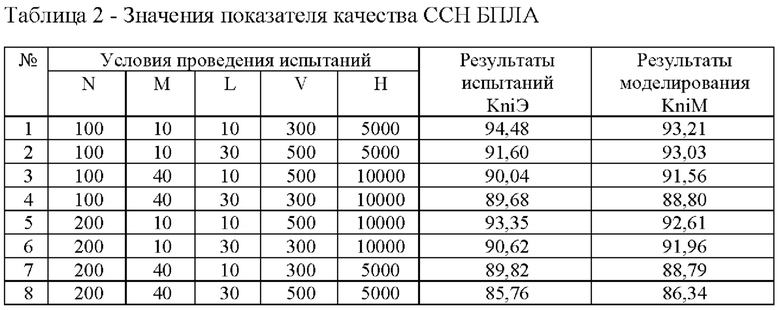
Используя математическую модель
Kп=89,79-1,27N-1,94М-1,1L+0,34V+0,215H,
полученную, по результатам предварительных испытаний, вычисляются оценки Kni. Варьируя случайным образом параметрами моделируемых условий, получены 32 значения показателя качества.
На основе экспериментальных данных вычисляются среднее статистическое значение показателя качества, среднеквадратическое отклонение и дисперсия
 .
.
По результатам моделирования также определяются статистическое значение показателя качества, среднеквадратическое отклонение и дисперсия
 .
.
Расчетное значение Kп0, σ0 и σ02 вычисляются с использованием полученных 32 модельных значений
 .
.
Вычисляется корреляционный момент (момент связи) статистического значения KпЭ и модельного статистического значения KпМ по формуле
 .
.
Подставляя рассчитанные значения в формулу, окончательно получается величина показателя качества
 .
.
Таким образом, результаты вычислений наглядно показывают, что показатель качества, полученный при объединении данных натурных испытаний и математического моделирования, отличается от показателя качества, вычисленного только по экспериментальным данным.
Точность оценки показателя качества, полученного по результатам натурных испытаний и математического моделирования, характеризуется ее дисперсией. Дисперсия  рассчитывается по формуле
рассчитывается по формуле
 .
.
Для этого вычисляются корреляционные моменты статистического значения KпЭ и расчетного значения Kп0, модельного статистического значения KпМ и расчетного значения Kп0 по формулам:
 .
.
 .
.
Подставляя рассчитанные значения в соответствующую формулу, окончательно получается дисперсия показателя качества и выигрыш в точности
 ,
,
 .
.
Таким образом, точность оценки Kп с использованием модельной информации в данном примере на 5 % выше оценки KпЭ, полученной только по результатам натурных испытаний. Результаты расчетов относительно других исходных данных свидетельствуют о возможности повышения точности оценок до нескольких десятков процентов и выше (Кивалов А.Н., Умеренков С.А. Теоретические основы определения тактико-технических характеристик образцов вооружения на этапе испытаний. Монография/ Под ред. А.Н. Кивалова. - СПб, МО РФ, 2020. - 320 с., Кивалов А.Н. Комплексный подход к повышению качества оценивания характеристик образцов вооружения на этапе полигонных испытаний. Вопросы оборонной техники. Серия 16. Технические средства противодействия терроризму. - М.: НТЦ «Информтехника». - СПб: 2015. - Вып. 1-2 (79-80), с. 121-127).
Сформированная многофакторная регрессионная модель обеспечивает возможность для оптимизации оставшейся программы испытаний ССН БПЛА. В связи с тем, что в 90% случаев целевые показатели опытного образца не соответствуют предъявляемым к ним требованиям на практике, на ранних этапах испытаний, возникает необходимость его доработки (доводки до требуемого значения эффективности). В настоящее время задача по совершенствованию конструктивных параметров ССН БПЛА решается методом экспертного анализа, в ходе которого происходит выбор наиболее значимых факторов (показателей, влияющих на эффективность функционирования изделия) и интуитивное изменение уровней их значения. Далее после совершения определенных доработок, производятся натурные испытания. Такой способ является не эффективным, так как требует дополнительного расхода времени и ресурсов, а оптимальные значения конструктивных параметров могут быть не достигнуты на следующей стадии испытаний, тогда процесс анализа результатов и обоснование способов доработки повторяется заново.
Поэтому наличие адекватной модели, позволяет спланировать и осуществить математический эксперимент и решить задачу структурно-параметрического синтеза оптимальной ССН БПЛА, без необходимости проведения ряда доводочных испытаний, а именно:
произвести расчет показателя эффективности с различными значениями конструктивных параметров;
определить количество ресурсов, потребных для достижения оптимального варианта при каждой комбинации факторов (конструктивных параметров) функционирования системы;
определить ресурсные и целевые показатели;
обосновать критерий оценки качества функционирования системы;
осуществить отбор достигнутых вариантов с учетом ограничений по ресурсам, сравнить отобранные варианты по критерию и подготовить рекомендации по оптимальному выбору конструктивных параметров и формированию облика ССН БПЛА, способному эффективно функционировать в условиях внешних и деструктивно воздействующих факторов.
Приведенные выше операции осуществляются без дополнительного расхода материальных ресурсов. Кроме того, возникает возможность перераспределения ресурсов для оценки других показателей качества (надежности, технической эстетики, стойкости к внешним воздействующим факторам и др.), предусмотренных программой испытаний.
Представляется достаточным, для оценки целевого показателя запланировать 5% от объема испытаний предшествующего этапа.
Если в приведенном примере было произведено восемь натурных экспериментов N=8, тогда после доработок изделия с учетом рекомендаций, обоснованных с помощью математической модели, для оценки целевого показатель эффектности ССН БПЛА необходимо два эксперимента N=2. (Элементы теории испытаний и контроля технических систем/ В.И. Городецкий, А.К. Дмитриев, В.М. Марков. Под ред. М. Юсупова. - Л.: Энергия, 1978. - 192 с, стр. 62, ГОСТ Р 57700.37-2021, п. 3.25, стр. 6, ГОСТ 15.210-2021).
В результате проведения натурно-технического эксперимента на макете, созданном для проверки технической реализуемости заявленного способа получены следующие результаты.
Условно для реализации способа прототипа, подразумевающего проведение 8 натурных экспериментов, фактические суммарные временные составят Твр факт. ≈248 ч., (из расчета на один натурный эксперимент ≈31 час). Соответственно для предлагаемого способа суммарные трудозатраты составят Твр пр.=62 ч.
Оценка эффективности заявленного способа:
 ,
,
 .
.
Что и подтверждает достижимость заявленного технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИМИТАЦИИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ ОТРАБОТКИ СИСТЕМЫ САМОНАВЕДЕНИЯ ПРИ ПРОВЕДЕНИИ ЛЕТНЫХ ИСПЫТАНИЙ | 2016 |
|
RU2636430C1 |
| СПОСОБ ИСПЫТАНИЯ СИСТЕМ ОБНАРУЖЕНИЯ КАНАЛА УПРАВЛЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ОХРАНЯЕМЫХ ОБЪЕКТАХ | 2023 |
|
RU2821601C1 |
| Способ испытания систем радиоэлектронного подавления беспилотных летательных аппаратов | 2023 |
|
RU2817392C1 |
| СПОСОБ ПРОВЕДЕНИЯ НАТУРНО-МОДЕЛЬНЫХ ИСПЫТАНИЙ РАДИОЭЛЕКТРОННЫХ СИСТЕМ | 1997 |
|
RU2137193C1 |
| Устройство полунатурного моделирования системы управления беспилотным летательным аппаратом с радиолокационным визиром | 2015 |
|
RU2629709C2 |
| Способ наведения беспилотного летательного аппарата | 2018 |
|
RU2691902C1 |
| Комплекс распределенного управления интеллектуальными роботами для борьбы с беспилотными аппаратами | 2024 |
|
RU2838977C1 |
| СПОСОБ ДОСТАВКИ ПОЛЕЗНОЙ НАГРУЗКИ НА ВОЗДУШНЫЙ ОБЪЕКТ | 2023 |
|
RU2804765C1 |
| Многоцелевой резервный контур взаимодействия "лётчик-самолет" для лётных испытаний высокоавтоматизированных и беспилотных авиационных комплексов | 2020 |
|
RU2743236C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2022 |
|
RU2791341C1 |
Использование: область испытаний беспилотных летательных аппаратов (БПЛА), оснащенных системой самонаведения (ССН), в том числе может быть использован для определения их показателей эффективности и эксплуатационных характеристик на основе технологии «цифровых двойников». Сущность: использование цифрового испытательного полигона и цифрового двойника БПЛА позволяет имитировать условия внешней среды его функционирования, в т.ч. внешние и деструктивно воздействующие на него факторы, функционирование его системы самонаведения при различном характере фоно-целевой обстановки. Предложенный способ расширяет диапазон условий проведения испытаний, включая те условия обстановки, в которых проверка качества функционирования невозможна или связана со значительными затратами ресурсов. Технический результат: сокращение времени и числа натурных экспериментов при выполнении требований точности и достоверности оценок определяемых показателей эффективности и эксплуатационных характеристик ССН БПЛА в различных условиях решаемых задач с учетом внешних и деструктивно воздействующих факторов. 2 ил., 2 табл.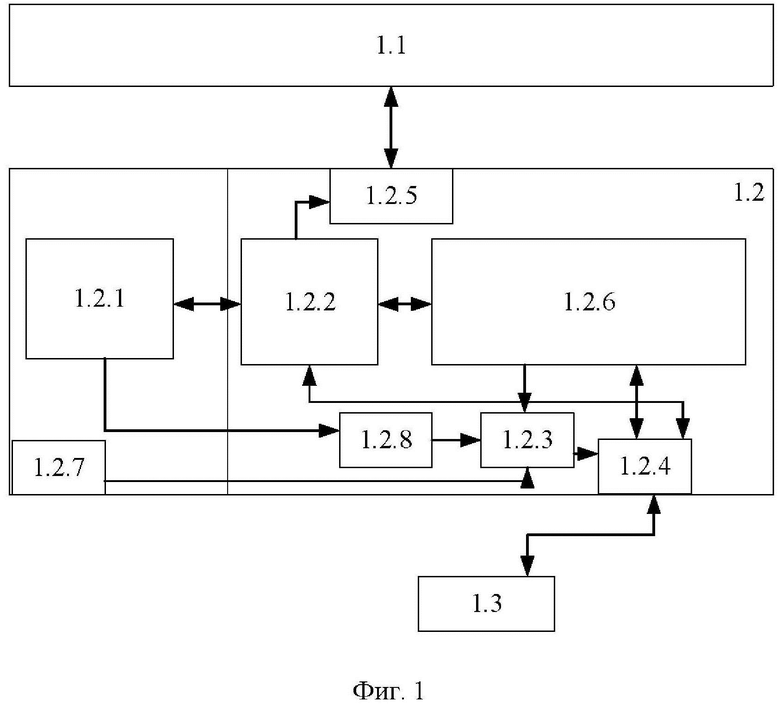
Способ определения характеристик системы самонаведения беспилотных летательных аппаратов, при котором размещают имитатор беспилотного летательного аппарата на авиационном носителе, подключают бортовой разъем имитатора беспилотного летательного аппарата к аппаратуре носителя, подают питание на бортовой разъем имитатора беспилотного летательного аппарата, в момент начала эксперимента производят имитацию пуска, имитируют функционирование и токопотребление беспилотного летательного аппарата, записывают информационный обмен на внутреннее запоминающее устройство, перед полетом авиационного носителя с помощью модуля программатора задают полетное задание, проводят предстартовый контроль беспилотного летательного аппарата, перед имитацией пуска беспилотного летательного аппарата включают систему самонаведения и выставляют инерциальную систему управления, полет авиационного носителя осуществляют по траектории, приближенной к заданной для беспилотного летательного аппарата со штатной работой системы самонаведения и инерциальной системы управления, с помощью устройства записи информации регистрируют телеметрическую информацию, после полета производят обработку и анализ телеметрической информации, в полетном задании подают траекторию полета авиационного носителя после имитации пуска беспилотного летательного аппарата с различными углами места относительно цели, при этом с помощью системы наведения обнаруживают и сопровождают цель, компенсируют помеховое отражение от поверхности, вводится полетное задание авиационного носителя с различными углами промаха по азимуту относительно цели, реализуют режим работы системы наведения с синтезированной апертурой, с помощью устройства записи информации регистрируют телеметрическую информацию, после полета производят обработку и анализ телеметрической информации, отличающийся тем, что в него введена наземная станция помех радиоэлектронным средствам, наземную станцию помех радиоэлектронным средствам включают, в направлении траектории полета авиационного носителя с испытываемой системой самонаведения, размещенной на борту беспилотного летательного аппарата, излучают радиоэлектронные помехи, воздействующие на функционирование системы самонаведения, на борту беспилотного летательного аппарата размещают датчики измерения внешних и деструктивно воздействующих факторов, модуль измерений значений параметров функционирования системы самонаведения в различных режимах работы, измеряют значения внешних и деструктивно воздействующих факторов, измеряют значения параметров функционирования системы самонаведения беспилотного летательного аппарата в различных режимах работы, на борту беспилотного летательного аппарата размещают блок беспроводной передачи данных, создают и развертывают аппаратно-программный комплекс обработки результатов испытаний, на вход аппаратно-программного комплекса по беспроводным каналам связи передают измеренные значения внешних и деструктивно воздействующих факторов и параметров функционирования системы самонаведения беспилотного летательного аппарата в различных режимах работы, создают и развертывают цифровой двойник изделия и цифровой полигон, с выхода аппаратно-программного комплекса на вход-выход цифрового полигона передают исходные данные о значениях внешних и деструктивно воздействующих факторов, задают параметры фоно-целевой обстановки, имитируют во всех вариациях признаки неподвижных и динамично маневрирующих целей, характеристики местности, на которой они располагаются, варьируют значениями внешних и деструктивно воздействующих факторов во всех сочетаниях от минимальных до максимальных значений, на вход-выход цифрового двойника беспилотного летательного аппарата с системой самонаведения передают исходные данные о значениях параметров функционирования в различных режимах работы, измеряют значения параметров функционирования цифрового двойника беспилотного летательного аппарата и системы самонаведения в различных режимах работы, в зависимости от параметров имитируемой фоно-целевой обстановки, измеряют значения показателей эффективности испытываемой системы самонаведения в различных условиях, обрабатывают и анализируют полученную информацию, измеренные значения записывают в базу знаний аппаратно-программного комплекса, используют значения параметров, полученные с помощью цифрового двойника в качестве исходных данных для последующего моделирования.
| СПОСОБ ПРОВЕДЕНИЯ НАТУРНО-МОДЕЛЬНЫХ ИСПЫТАНИЙ РАДИОЭЛЕКТРОННЫХ СИСТЕМ | 1997 |
|
RU2137193C1 |
| СПОСОБ ИСПЫТАНИЯ СИСТЕМ ОБНАРУЖЕНИЯ КАНАЛА УПРАВЛЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ОХРАНЯЕМЫХ ОБЪЕКТАХ | 2023 |
|
RU2821601C1 |
| СПОСОБ НАВЕДЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2515106C2 |
| Способ наведения беспилотного летательного аппарата | 2018 |
|
RU2691902C1 |
| US 5323309 A1, 21.06.1994. | |||

