Предлагаемое изобретение относится к быстродействующим электроприводам.
Необходимость применения быстродействующих электроприводов возникает, в частности, в задачах разгона полезной массы до заданной скорости на ограниченной длине. Например, предложен проект использования линейного электропривода в качестве средства создания тягового и тормозного усилий в установке для моделирования аэродинамики и динамики транспортных средств (Патент на полезную модель RU 147841). Ввиду быстротечности процесса разгона требуется обеспечить максимальное усилие двигателя на промежутке времени в несколько секунд.
Известен линейный асинхронный электропривод («Высокоскоростной наземный транспорт с линейным приводом и магнитным подвесом» / под ред. В.И. Бочарова, И.Д. Нагорского - М.: Транспорт, 1985, стр. 159, рис. 4.37.1), содержащий автономный инвертор напряжения (преобразователь частоты) и линейный асинхронный двигатель, состоящий из двух противолежащих индукторов с рабочими обмотками и немагнитного вторичного элемента. Регулирование тягового усилия в таком электроприводе осуществляется за счет изменения силы и частоты тока двигателя. Недостатком данного решения являются повышенные требования к мощности преобразователя частоты, которые ограничивают выбор элементной базы и увеличивают стоимость привода.
Наиболее близким к заявленному является линейный асинхронный электропривод («Высокоскоростной наземный транспорт с линейным приводом и магнитным подвесом» / под ред. В.И. Бочарова, И.Д. Нагорского. - М.: Транспорт, 1985, стр. 159, рис. 4.37.3), содержащий два автономных инвертора напряжения (преобразователя частоты) и линейный асинхронный электродвигатель. Линейный асинхронный двигатель состоит из двух противолежащих индукторов с рабочими обмотками и немагнитного вторичного элемента. В данном электроприводе два инвертора напряжения подключены к трансформатору, а их результирующее напряжение питает обмотки линейного асинхронного двигателя. Недостаток решения применительно к быстродействующим электроприводам - невысокая эффективность, обусловленная тем, что пуск осуществляется не при максимальном токе и максимальном тяговом усилии, а в момент, когда тяговое усилие превысит усилие трогания подвижной части. При ограниченной длине подвижной части это означает, что часть ее длины не будет использоваться сразу с включением на полный ток и на максимальную силу. Также масса электропривода увеличивается из-за необходимости использования трансформатора для гальванически развязанного подключения двух инверторов напряжения на один двигатель.
Техническим результатом изобретения является повышение эффективности пуска путем обеспечения увеличения тягового усилия от нуля до максимальной величины безынерционно. Это уменьшает требуемую массу электропривода для разгона полезной массы до заданной скорости на ограниченной длине.
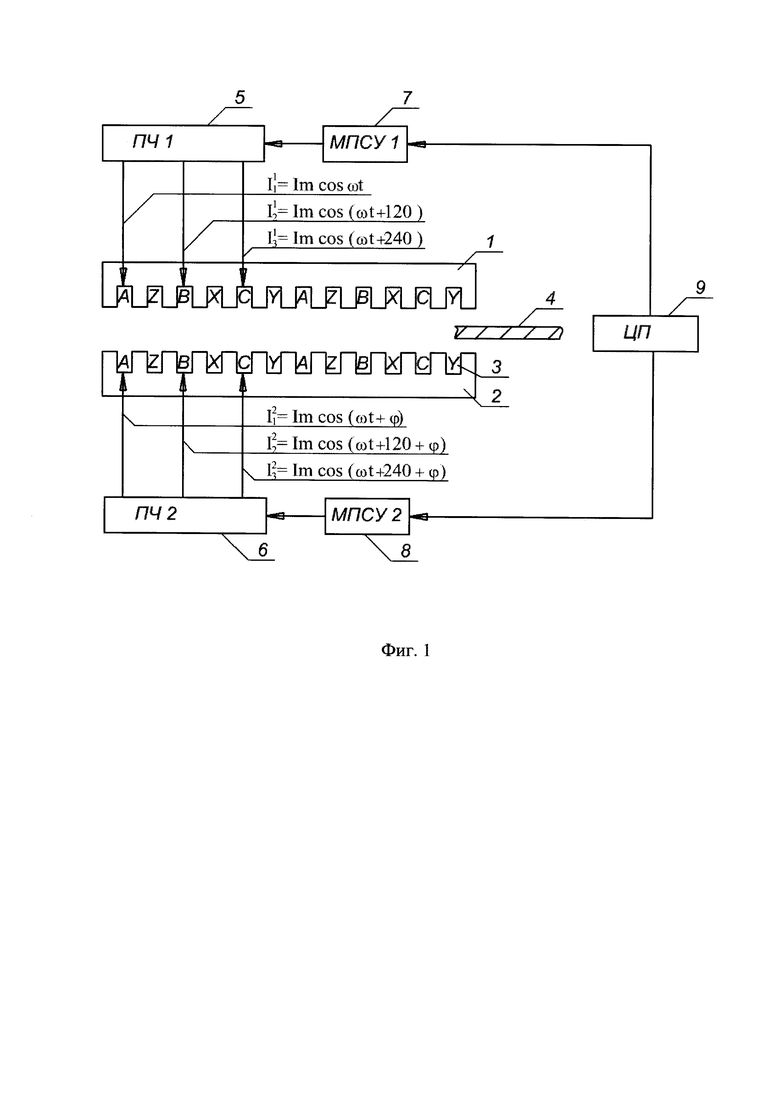
Технический результат достигается тем, что в линейный асинхронный электропривод, содержащий два автономных преобразователя частоты и линейный асинхронный двигатель, состоящий из двух противолежащих индукторов с независимыми рабочими обмотками и немагнитного вторичного элемента, помещенного в зазоре между индукторами, введены две микропроцессорные системы управления и единый центральный процессор, причем рабочая обмотка одного индуктора подключена к одному преобразователю частоты, а рабочая обмотка противолежащего индуктора - ко второму преобразователю частоты, вход каждой микропроцессорной системы управления подключен к своему преобразователю частоты, а выход каждой из них подключен к единому центральному процессору, при этом преобразователи частоты имеют управляемый фазовый сдвиг токов нагрузки, одноименных противолежащих индукторов. На фигуре 1 представлена схема линейного асинхронного электропривода.
Линейный асинхронный электропривод содержит линейный асинхронный двигатель, состоящий из двух противолежащих индукторов 1, 2 с одинаковым чередованием фаз в обмотках 3 - AZBXCY. В зазоре между индукторами помещен немагнитный вторичный элемент 4. Питание независимых обмоток противолежащих индукторов осуществляется от двух преобразователей частоты (ПЧ) 5, 6, каждый из которых управляется своей микропроцессорной системой управления (МПСУ) 7, 8, задающие сигналы на которые поступают от единого центрального процессора 9 (ЦП). ЦП 9 осуществляет расчет необходимой частоты и фазового сдвига токов индукторов.
В предложенном техническом решении гальваническая развязка двух преобразователей частоты 5 и 6 обеспечивается подключением их к электрически независимым обмоткам противолежащих индукторов 1, 2, а управление тягой осуществляется при максимальном токе в обмотках двигателя за счет сдвига фаз питающих двигатель токов двух преобразователей 5 и 6.
Один из двух индукторов при питании от своего преобразователя частоты системой трехфазных токов  ,
, 
 формирует в рабочем зазоре двигателя бегущее магнитное поле, выражение для которого имеет вид
формирует в рабочем зазоре двигателя бегущее магнитное поле, выражение для которого имеет вид

где: B1 - индукция в рабочем зазоре двигателя, созданная первым индуктором, Bm - амплитуда индукции, ωt - круговая частота,  - волновое число, τ - полюсное деление.
- волновое число, τ - полюсное деление.
Второй индуктор, запитанный своим преобразователем частоты системой трехфазных токов , со сдвигом токов одноименных фаз на угол ϕ по отношению к токам первого индуктора, формирует в рабочем зазоре индуктора волну бегущего поля

Наложившись друг на друга, поля противолежащих индукторов сформируют результирующее поле

Результирующее магнитное поле, индуцируя во вторичном элементе токи, создает тяговое усилие от нуля до максимальной величины безынерционно, поскольку амплитуда тока нагрузки при этом не изменяется.
При ϕ=0 имеет место согласованное включение двух индукторов,

При 

При ϕ=π
Bp=0.
Таким образом, управляемый фазовый сдвиг позволяет изменять результирующее поле в зазоре двигателя от 0 до 2 Bm, а следовательно, и тяговое усилие без изменения действующего значения токовой нагрузки в обмотках двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ДЛЯ ПРОКЛАДКИ УТОЧНОЙ НИТИ В БЕСЧЕЛНОЧНЫХ ТКАЦКИХ СТАНКАХ | 1992 |
|
RU2035122C1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2004 |
|
RU2275732C2 |
| Способ определения рабочих характеристик линейного асинхронного электродвигателя | 1981 |
|
SU970582A1 |
| Способ экспериментального определения механической характеристики линейного асинхронного двигателя | 1983 |
|
SU1157624A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ-КОМПРЕССОР | 1992 |
|
RU2051461C1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2297090C1 |
| Однофазный линейный асинхронный двигатель | 1981 |
|
SU1007164A1 |
| Способ определения рабочих характе-РиСТиК лиНЕйНОгО АСиНХРОННОгО элЕКТРО-дВигАТЕля | 1979 |
|
SU845228A1 |
| ВЕНТИЛЬНО-ИНДУКТОРНАЯ МАШИНА | 2001 |
|
RU2189685C1 |
| Способ определения параметров линейного асинхронного электродвигателя | 1980 |
|
SU922663A1 |
Изобретение относится к электротехнике, к быстродействующим электроприводам. Технический результат состоит в обеспечении возможности уменьшения массы электропривода для разгона до заданной скорости на ограниченной длине за счет безынерционного увеличения тягового усилия от нуля до максимальной величины. Линейный асинхронный электропривод содержит два автономных преобразователя частоты и линейный асинхронный двигатель, состоящий из двух противолежащих индукторов с электрически независимыми рабочими обмотками и немагнитного вторичного элемента, помещенного в зазоре между индукторами. С целью повышения эффективности пуска рабочая обмотка одного индуктора подключена к одному преобразователю частоты, а рабочая обмотка противолежащего индуктора - к второму преобразователю частоты. Преобразователи частоты имеют управляемый фазовый сдвиг токов нагрузки одноименных фаз противолежащих индукторов. 1 ил.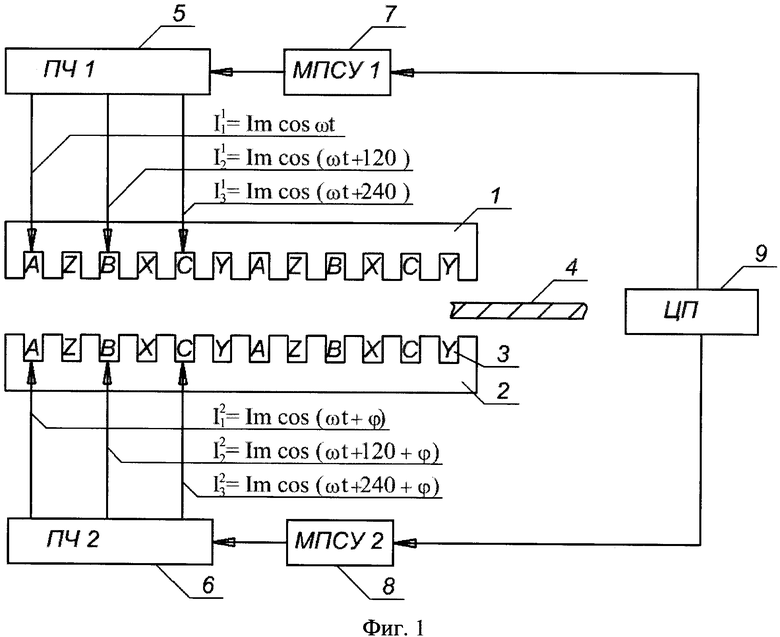
Линейный асинхронный электропривод, содержащий два автономных преобразователя частоты и линейный асинхронный двигатель, состоящий из двух противолежащих индукторов с независимыми рабочими обмотками и немагнитного вторичного элемента, помещенного в зазоре между индукторами, отличающийся тем, что в него введены две микропроцессорные системы управления и единый центральный процессор, причем рабочая обмотка одного индуктора подключена к одному преобразователю частоты, рабочая обмотка противолежащего индуктора - к второму преобразователю частоты, вход каждой микропроцессорной системы управления подключен к своему преобразователю частоты, а выход каждой из них подключен к единому центральному процессору, при этом преобразователи частоты имеют управляемый фазовый сдвиг токов нагрузки одноименных фаз противолежащих индукторов.
| CN 103684194 A, 26.03.2014 | |||
| CN 201467068 U, 12.05.2010 | |||
| CN 101316093 A, 03.12.2008 | |||
| Стереоавтограф | 1960 |
|
SU147841A1 |
| ПРИВОД С ИЗОГНУТЫМ ЛИНЕЙНЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2543972C2 |

