{50 СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЛИНЕЙНОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ косвенного определения механической характеристики асинхронного электродвигателя | 1987 |
|
SU1539697A1 |
| Способ определения характеристик линейных асинхронных двигателей и устройство для его осуществления | 1990 |
|
SU1817048A1 |
| Способ косвенного определения механической характеристики асинхронного электродвигателя | 1984 |
|
SU1246029A1 |
| ЛИНЕЙНАЯ ИНДУКЦИОННАЯ МАШИНА | 1992 |
|
RU2069443C1 |
| Способ определения рабочих характеристик линейного асинхронного электродвигателя | 1981 |
|
SU970582A1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2004 |
|
RU2275732C2 |
| Способ тепловых испытаний индуктора линейного электродвигателя переменного тока | 1987 |
|
SU1503052A1 |
| Способ определения рабочих характе-РиСТиК лиНЕйНОгО АСиНХРОННОгО элЕКТРО-дВигАТЕля | 1979 |
|
SU845228A1 |
| УСТРОЙСТВО ЭЛЕКТРОМАГНИТНОЙ ПОДВЕСКИ И ТЯГИ ЭКИПАЖА ТРАНСПОРТНОГО СРЕДСТВА | 1982 |
|
SU1145585A1 |
| Способ определения показателей технического качества магнитопровода индуктора трёхфазного линейного асинхронного электродвигателя | 2023 |
|
RU2803039C1 |
Изобретение относится к электротехнике и мохсет быть использовано при построении схем замещения линейного асинхронного электродвигателя.
Известен способ определения параметров электродвигателя с массивным ротором, включающий измерения в статических опытах холостого хода и короткого замыкания значений фазного напряжения, фазного потребляемого тока и зависимости пускового момента. от скольжения 1.
Недостатком указанного способа является его сложность, определяемая большим количеством требуемых для его осуществления измерений.
Наиболее близкий по технической сущности- способ определения параметров линейного асинхронного электродвигателя с двухсторонним индуктором и немагнитным якорем путем измерения в статических опытах холостого хода и короткого замыкания значений фазного напряжения, фазного потребляемого тока и тягового усилия 2. .
Недостатком данного способа является то, что он требует наличия аппаратов, регулирующих параметры силового питания.
. Цель изобретения - упрощение способа определения параметров линейного асинхронного электродвигателя.
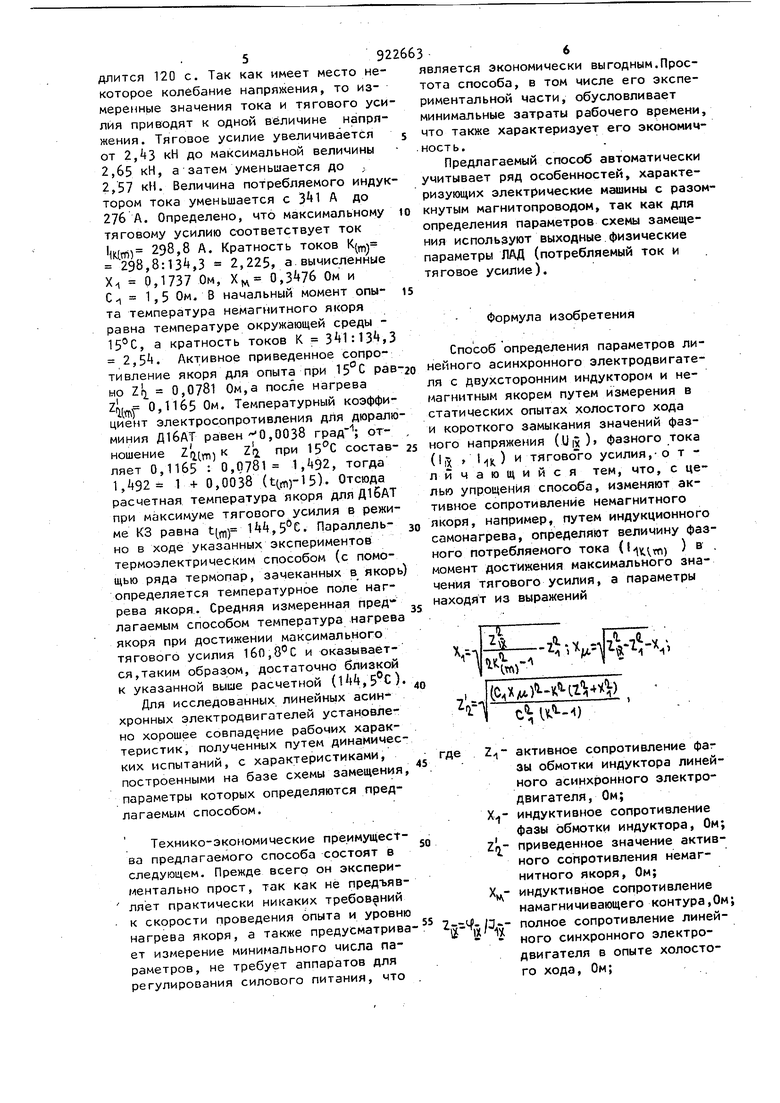
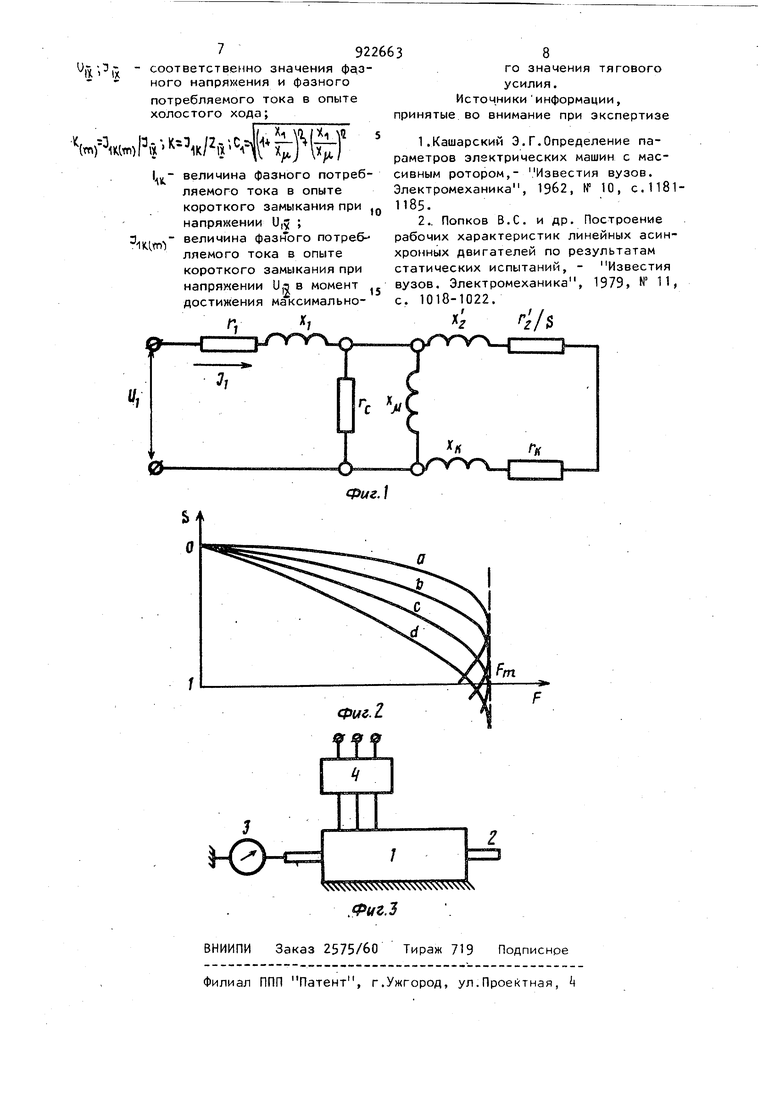
Цель достигается тем, что согласно способу определения параметров линейного асинхронного электродвигателя, изменяют активное сопротивление немагнитного якоря, например, путем индукционного самонагрева, определяют величину фазного потребляемого тока 1(.т) момент достижения максимального значения тягового усилия, а параметры находят из выражений -Щ)) t-lcl; («.-1) где активное сопротивление фазы обмотки индуктора линейного асинхронного электродвигателя. Ом; индуктивное сопротивление фазы обмотки индуктора, Ом; приведенное знамение активного сопротивления немагнитного якоря, Ом; индуктивное сопротивление намагничивающего контура,Ом . полное сопротивление линейного асинхронного электродвигателя в опыте холостого -хода. Ом; Urj; 1л- соответственно значения фазного напряжения и фазного , потребляемого тока в опыте холостого хода; .. 1,г f величина фазного потребляв мого тска в опыте короткого замыкания при напряжении Ц - ПР.пыиина Лляипгл пптгк Я- величина фазного потреб ляемого тока D опыте короткого замыкания при нап ряжении и iTi в момент дост жения максимального значе ния тягового усилия. На фиг. 1 изображена схема замеще ния фазы линейного асинхронного элек тродвигателя с двухсторонним индукто ром и немагнитным вторичным элементом на фиг. 2 - механические характеристики линейного асинхронного электродви гателя при различных значениях актив ного сопротивления якоря (кривая а соответству1гт минимальному, а кривая d - максимальному значению активного сопротивления якоря); на фиг. 3 - схема установки для проведения экспериментов по предлагаемому способу . Установка для проведения экспериментов по предлагаемому способу содержит линейный асинхронный электродвигатель 1, в рабочем зазоре двухстороннего индуктора которого находится немагнитный якорь 2, заторможенный через измеритель тягового уси лителя 3- В силовую цепь питания линейного асинхронного электродвигателя включен измерительный комплект k. На фиг. 1 - г, - параметр, учитывающий потери D стали; Х| и г,- параметры, учитывающие вторичный продольный краевой эффект. Предлагаемый способ заключается в следующем. При заданном значении фазного напряжения питания линейного асинхронного двигателя (ЛАД) U и -заданной частоте тока питания, например сетевой,проводят опыт холостого хода,в котором измеряют значение фазного тока 1)5 , а затем определяют величину сопротивления Zi-j; . Измерения действующих значений гГроизводят вольтметром и амперметром. При тех же величинах напряжения и частоты тока питания проводят и опыт короткого замыкания. В ходе опыта короткого замыкания, сопровождающегося нагревом вторичного элемента, изменение величины тока, потребляемого индуктором, происходит по монотонной убывающей кривой, а изменение тягового усилия, развиваемого ЛАД, описывается кривой, имеющей максимум. Графики изменения величины тока и тягового усилия строят по ряду значений, полученных в ходе опыта короткого замыкания, либо при последовательном непосредственном отсчете показаний приборов, либо с использованием осциллографической записи соответствующих сигналов. В последнем случае для измерения тягового усилия может применяться тензометрический датчик усилия. С помощью указанных графиков или соответствующих им таблиц определяют величину тока 1 который потребляет индуктор ЛЛД при достижении максимума тягового усилия в режиме короткого замыкания. Далее вычисляют величину кратности токов Ш Mtlw) /li.VЭкспериментольное исследование предлагаемого способа проводят с использованием двухсторонних индукторов линейных асинхронных электродвигателей при работе их в диапазоне мощностей 50-250 кВт. В качестве немагнитного якоря используют дюралюминиевую пластину толщиной 10 ммо Фазное напряжение питания индуктора ЛАД 70 В; частота- тока питания (сетевая) (50 Гц1 . Измеренная величина тока холостого хода lg 13,3 А. Вычисленное значение Z.r; 0,5213 Ом. .8 опыте отсчет показаний вольтметра, амперметра производят через каждые 10 с. Всего опыт 592 длится 120 с. Так как имеет место некоторое колебание напряжения, то измереиные значения тока и тягового усилия приводят к одной величине напряжения. Тяговое усилие увеличивается от 2,3 кН до максимальной величины 2,б5 кН, а затем уменьшается до 2,57 кИ. Величина потребляемого индуктором тока уменьшается с З А до 276 А. Определено, что максимальному тяговому усилию соответствует ток Wm) 298,8 А. Кратность токов ) 298,8:13,3 2,225, а вычисленные Х 0,1737 Ом, 0, Ом и С 1,5 Ом, В начальный момент опыта температура немагнитного якоря равна температуре окружающей среды 15°С, а кратность токов К 3 1:13 i3 2,5. Активное приведенное сопротивление якоря для опыта при 15 С рав но Zi 0,0781 Ом,а после нагрева llmf Ом. Температурный коэффициент электросопротивления для дюралю миния Д16АТ равен 0,0038 град; отношение zlj к ZQ при 15С составляет 0,11б5 : 0,0781 1,492, тогда 1,492 1 + 0,0038 (Цт)-15). Отсюда расчетная температура якоря для Д1бАТ при максимуме тягового усилия в режиме КЗ равна t() ,5°С. Параллельно в ходе указанных экспериментов термоэлектрическим способом (с помощью ряда термопар, зачеканных в якорь определяется температурное поле нагрева якоря. Средняя измеренная пред лагаемым способом температура нагрева якоря при достижении максимального тягового усилия 160,8С и оказывается, таким образрм, достаточно близкой к указанной выше расчетной , Для исследованных линейнь1Х асинхронных электродвигателей установлено хорошее совпадение рабочих характеристик, полученных путем динамических испытаний, с характеристиками, построенными на базе схемы замещения, параметры которых определяются предлагаемым способом. Технико-экономические преимущества предлагаемого способа состоят в следующем. Прежде всего он экспериментально прост, так как не предъяв ляёт практически никаких требований к скорости проведения опыта и уровню нагрева якоря, а также предусматривает измерение минимального числа параметров, не требует аппаратов для регулирования силового питания, что 36 является экономически выгодным.Простота способа, в том числе его экспериментальной части, обусловливает минимальные затраты рабочего времени, что также характеризует его экономичНОСТЬ. Предлагаемый способ автоматически учитывает ряд особенностей, характеризующих электрические машины с разомкнутым магнитопроводом, так как для определения параметров схемы замеще используют выходные физические параметры ЛАД (потребляемый ток и тяговое усилие). Формула изобретения Способ определения параметров линейного асинхронного электродвигателя с двухсторонним индуктором и немагнитным якорем путем измерения в статических опытах холостого хода и короткого замыкания значений фазного напряжения (Uix) фазного тока (ijx .) и тягового усилия,-о т ли чающийся тем, что, с целью упрощения способа, изменяют активное сопротивление немагнитного коря, например, путем индукционного самонагрева, определяют величину фазНОГО потребляемого тока {Ц(1) момент достижения максимального значения тягового усилия, а параметры находят из выражений .л.чг JA. -ц i V4 1 (с,хдл)) С ) где активное сопротивление фаг зы обмотки индуктора линейного асинхронного электродвигателя. Ом; индуктивное сопротивление фазы обмотки индуктора. Ом; приведенное значение активного сопротивления немагнитного якоря. Ом; Хц- индуктивное сопротивление намагничивающего контура,Ом; полное сопротивление линей ного синхронного электродвигателя в опыте холостого хода. Ом;
