Изобретение относится к области прецизионного приборостроения и может быть использовано при разработке и производстве гироскопов с электростатическим подвесом ротора.
Известен способ взвешивания ротора электростатического гироскопа [П.И. Малеев. Новые типы гироскопов // Л.: Судостроение, 1971, стр. 13-17], согласно которому на пары электродов, размещенных по осям подвеса с противоположных сторон ротора, подают постоянное (силовое) и переменное (измерительное) напряжения. Постоянное напряжение используют для создания центрирующей силы. Переменное напряжение используют для определения положения ротора в зазоре между электродами. Положение ротора определяется по сигналу разбалансировки мостовой схемы, плечами которой являются емкости между электродами и ротором. Далее сигнал разбалансировки преобразуют в сигнал управления постоянным напряжением на электродах.
Недостатком способа является малая точность электростатического подвеса при размещении электроники, формирующей сигнал управления за пределами гироскопа. Такое размещение требуется, например, при реализации криогенного гироскопа с электростатическим подвесом ротора [Патент РФ №2011166]. Указанный недостаток обусловлен тем, что сигнал управления формируется по изменению значений емкостей между ротором и электродами. В электростатическом подвесе современных гироскопов изменения значений емкостей находятся на уровне десятков пФ и при выносе электроники за пределы гироскопа на расстояние более 1 метра теряются на фоне паразитных емкостей соединительных цепей, составляющих сотни пФ.
Известен также способ взвешивания ротора электростатического гироскопа, у которого приведенный выше недостаток отсутствует [Я.А. Некрасов, B.C. Фрезинский. Активные электростатические подвесы // Центральный научно-исследовательский институт «Румб», 1987, стр. 38, 72], который и принят за прототип. При его реализации на пары силовых электродов, размещенных с противоположных сторон взвешиваемого ротора, подают постоянное напряжение, через дополнительный электрод на ротор подают переменное напряжение. Постоянное напряжение используют для создания центрирующей силы. Переменное напряжение используют для определения положения ротора в зазоре между электродами. Для этого измеряют переменные составляющие токов, протекающих в зазорах между ротором и измерительными электродами, установленными парами на одной оси с силовыми электродами с противоположных сторон ротора. На их основе формируют сигнал управления постоянным напряжением на электродах. При измерении переменных токов измерительных электродов обеспечивают нулевое входное сопротивление измерительных цепей, что создает на измерительном электроде переменное напряжение, близкое к нулю. При выносе электроники за пределы гироскопа влияние паразитных емкостей соединительных цепей исключается.
Недостатком способа является малое значение центрирующей силы создаваемой подвесом. Величина центрирующей силы пропорциональна площади силообразующих электродов, которая в конструкции прототипа ограничена, во-первых, необходимостью размещения дополнительного электрода, во-вторых, в данном подвесе площади измерительных электродов не используются для силообразования.
Задачей настоящего изобретения является совершенствование процесса управления электростатическим подвесом ротора гироскопа.
Достигаемый технический результат - увеличение центрирующей силы электростатического подвеса ротора гироскопа, и соответственно, перезагрузочной способности гироскопа.
Поставленная задача решается тем, что в известном способе взвешивания ротора гироскопа в электростатическом подвесе, согласно которому на ротор подают переменное напряжение, к силовым электродам подвеса прикладывают постоянное напряжение, измеряют переменные составляющие токов между ротором и измерительными электродами, на их основе формируют сигнал управления постоянным напряжением на силовых электродах. Введены операции, согласно которым переменное напряжение подают на ротор через силовые электроды, а к измерительным электродам прикладывают постоянное напряжение, сформированное сигналом управления на основе переменных составляющих токов, измеренных между ротором и измерительными электродами.
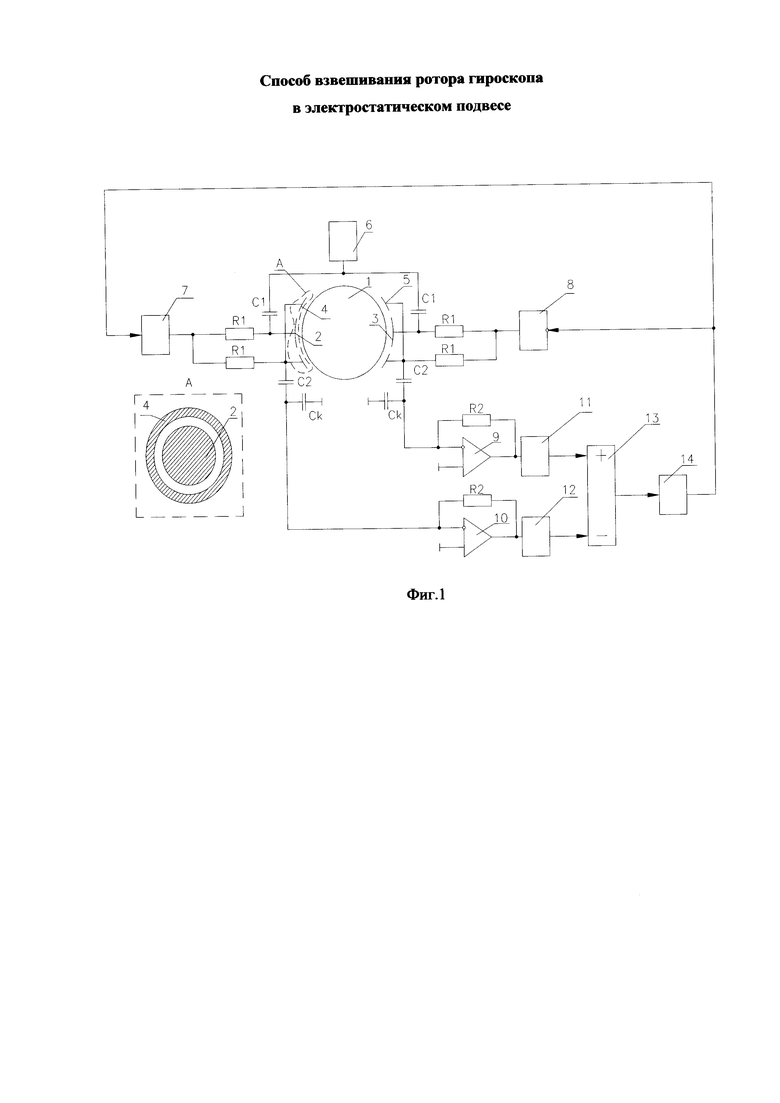
Предлагаемое изобретение поясняется фиг. 1. На фиг. 1 приведена функциональная схема одноосного электростатического подвеса ротора гироскопа.
На фиг. 1 приняты следующие обозначения:
1 - взвешиваемый ротор (далее - ротор);
2, 3 - силовые электроды;
4, 5 - измерительные электроды; 6 - генератор;
7, 8 - высоковольтные усилители;
9, 10 - измерительные усилители переменного тока (далее - измерительные усилители); 11, 12 - выпрямители;
13 - суммирующее устройство (далее - сумматор);
14 - корректирующее звено;
C1, С2 - разделительные емкости (далее - конденсаторы);
Ск - паразитная емкость соединительного кабеля (далее - емкость соединительного кабеля);
R1, R2 - резисторы.
Работа устройства, в котором реализован предлагаемый способ, осуществляется следующим образом. На силовые электроды 2, 3 (фиг. 1), расположенные попарно с противоположных сторон ротора 1, через разделительные емкости С1 с генератора 6 подают переменное напряжение. На силовые электроды 2, 3 и измерительные электроды 4, 5, попарно установленные на одной оси (на фиг. 1 вид А), с выхода высоковольтных усилителей 7 и 8 через резисторы R1 подают постоянное напряжение. Резисторы R1 обеспечивают развязку цепей постоянного и переменного тока. При этом переменное напряжение с генератора 6 поступает через конденсаторы С1 только на силовые электроды 2 и 3, а переменный ток измерительных электродов 4 и 5 через конденсаторы С2 поступает только на входы измерительных усилителей 9 и 10. Постоянное напряжение используют для создания центрирующей силы. Ее величина пропорциональна площади силообразующих электродов (2, 3 и 4, 5). В предлагаемом способе величина центрирующей силы увеличена за счет увеличения площади собственно силовых электродов 2, 3. Площадь силовых электродов 2, 3 увеличена за счет исключенной площади дополнительного электрода. Также для образования силы используются площади измерительных электродов 4, 5. Переменное напряжение используется для определения положения ротора 1 в зазоре между измерительными электродами 4, 5 и формирования в дальнейшем сигнала управления высоковольтными усилителями 7 и 8 (величиной постоянного напряжения на их выходе). Под действием переменой составляющей в зазоре между ротором 1 и измерительным электродом 4 протекает переменный ток, амплитуда которого пропорциональна величине зазора. В зазоре между ротором 1 и измерительным электродом 5, установленным с противоположной стороны ротора 1, протекает переменный ток, амплитуда которого пропорциональна величине зазора. С помощью токов формируется сигнал управления высоковольтными усилителями 7, 8. Для этого токи через конденсаторы С2 поступают на входы измерительных усилителей 9 и 10. Далее выходные напряжения измерительных усилителей 9 и 10 преобразуются на выпрямителях 11 и 12. Постоянные составляющие поступают на сумматор 13, на выходе которого напряжение пропорционально смещению ротора 1 из центра подвеса (пропорционально разности измеренных в зазорах токов). Через корректирующее звено 14, которое обеспечивает устойчивость подвеса, напряжение с выхода сумматора 13 поступает на вход высоковольтного усилителя 7 и в противофазе на вход высоковольтного усилителя 8. Высоковольтные усилители 7, 8 меняют постоянное напряжение таким образом, чтобы ротор 1 под их действием переместился в положение, при котором зазоры с противоположных сторон ротора 1 стали бы равными. Измерительные усилители 9 и 10 работают таким образом, что разница переменного напряжения между их инвертным и прямым (на рисунке заземлен) входами равна нулю. При этом ток измерительного электрода 4 (5) проходит через резистор R2, образуя на выходе измерительного усилителя 9 (10) напряжение, пропорциональное входному току. В результате чего входы измерительных усилителей 9 (10) заземлены. При этом отсутствует напряжение на емкости соединительного кабеля Ск, их величина не влияет на передаваемый сигнал и можно электронику подвеса выносить за пределы гироскопа на расстояние более одного метра.
При реализации предлагаемого способа центрирующая сила подвеса увеличивается по сравнению со способом прототипа. Увеличение происходит за счет увеличения площади силообразующих электродов. Площадь силообразующих электродов увеличивается за счет:
- увеличения площади собственно силовых электродов при перераспределении в их пользу площади исключенного дополнительного электрода,
- использования для образования сил площади измерительных электродов.
Таким образом, поставленная цель достигнута.
На предприятии АО «Концерн «ЦНИИ «Электроприбор» предлагаемый способ экспериментально проверен. Получены положительные результаты. В настоящее время разрабатывается техническая документация для использования предлагаемого технического решения при производстве гироскопов с электростатическим подвесом ротора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления подвесом ротора электростатического гироскопа | 2016 |
|
RU2626572C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВЕСОМ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2017 |
|
RU2640967C1 |
| Гидродинамический гироскоп | 2021 |
|
RU2769078C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВЕСОМ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2006 |
|
RU2327954C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВЕСОМ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2007 |
|
RU2338999C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВЕСОМ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2022 |
|
RU2799506C1 |
| УНИВЕРСАЛЬНЫЙ НЕКОНТАКТНЫЙ ГИРОСКОП | 2013 |
|
RU2521765C1 |
| Способ управления подвесом ротора электростатического гироскопа | 2020 |
|
RU2746313C1 |
| Криогенный гироскоп | 2016 |
|
RU2643942C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП КОМПЕНСАЦИОННОГО ТИПА | 2010 |
|
RU2471149C2 |
Изобретение относится к области прецизионного приборостроения и может быть использовано при разработке и производстве гироскопов с электростатическим подвесом ротора. На ротор подают переменное напряжение, а к силовым электродам подвеса прикладывают постоянное напряжение. Измеряют переменные составляющие токов между ротором и измерительными электродами, на их основе формируют сигнал управления постоянным напряжением на силовых электродах. При этом переменное напряжение подают на ротор через силовые электроды, а к измерительным электродам прикладывают постоянное напряжение, сформированное сигналом управления на основе переменных составляющих токов. Технический результат заключается в увеличении центрирующей силы электростатического подвеса ротора гироскопа, и соответственно, перезагрузочной способности гироскопа. 1 ил.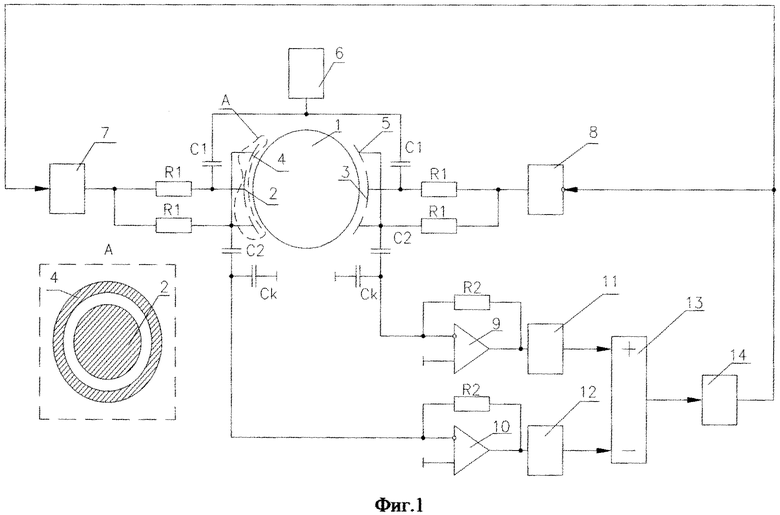
Способ взвешивания ротора гироскопа в электростатическом подвесе, согласно которому на ротор подают переменное напряжение, к силовым электродам подвеса прикладывают постоянное напряжение, измеряют переменные составляющие токов между ротором и измерительными электродами, на их основе формируют сигнал управления постоянным напряжением на силовых электродах, отличающийся тем, что переменное напряжение подают на ротор через силовые электроды, а к измерительным электродам прикладывают постоянное напряжение, сформированное сигналом управления на основе переменных составляющих токов, измеренных между ротором и измерительными электродами.
| СПОСОБ НАСТРОЙКИ КРИОГЕННОГО ГИРОСКОПА | 1983 |
|
SU1840511A1 |
| СПОСОБ ПРИВЕДЕНИЯ В РАБОЧЕЕ СОСТОЯНИЕ ЭЛЕКТРОСТАТИЧЕСКОГО ШАРОВОГО ГИРОСКОПА | 2001 |
|
RU2206874C1 |
| УСТРОЙСТВО для ПОДВЕСКИ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 0 |
|
SU309243A1 |
| ГИРОСКОП-АКСЕЛЕРОМЕТР С ЭЛЕКТРОСТАТИЧЕСКИМ ПОДВЕСОМ РОТОРА И ПОЛНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИЕЙ | 2014 |
|
RU2568147C1 |

