Изобретение относится к области военной робототехники и может быть использовано для пропорционального увеличения усилий при движениях военнослужащего, выполняющего боевую задачу, а также в повседневной жизни для перемещения грузов.
Известны изобретения, в которых описаны вспомогательные устройства для передвижения человека, основанные на каркасно-рычажной системе и электроприводах (см. например №JP 2011143243, №US 2013231595, №NZ 20080586912). Но данные устройства предназначены для имитации движения частей тела человека, а не для пропорционального увеличения мышечной силы, поскольку основное их назначение заключается в помощи людям с ограниченными возможностями. Наиболее близким к данному изобретению аналогом является изобретение №JP2013082065, где описывается роботизированное устройство, состоящее из каркаса, элементы которого имитируют части человеческого тела, системы приводов, основанных на электродвигателях и системы управления.
Основными причинами, препятствующими получению технического результата, который обеспечивается изобретением, являются отсутствие автономного источника питания, большая энергоемкость приводов, недоработанная система управления, что не обеспечивает мгновенный отклик движителей и вызывает некоторое дополнительное мышечное напряжение у оператора.
Универсальный общевойсковой экзоскелет состоит из каркасной системы шарнирных соединений и рычагов, движение которых обеспечивают приводы, основанные на твердотельном аэрогеле из углеродных нанотрубок с примесью каучука, электронной системы управления и аккумуляторного источника питания. Каркасная система состоит из 16 шарнирных соединений и 16 элементов (рычагов), выполненных из углепластиковых труб диаметром 40-50 мм, элементов крепления приводов движения и крепления блока управления и аккумуляторного источника энергии, а также гибких элементов крепления каркаса к телу человека и углепластиковой панели, повторяющей форму тыловой части торса человека.
Приводы движения рычагов каркаса выполнены в виде цилиндров диаметром от 40 до 120 мм с конусным заострением с двух сторон, материал приводов выполнены из твердотельного аэрогеля из углеродных нанотрубок с примесью каучука, к концам заостренных частей подведены электропроводные элементы, что обеспечивает минимальное энергопотребление при максимальной работе движения рычагов. Крепление приводов к рычагам осуществляется за счет защемления конусных концов синтетическими тканевыми лентами, пропитанными эпоксидной смолой и стянутыми стальными заклепками. Электронная система управления экзоскелетом состоит из не менее 24 датчиков позиционирования элементов каркаса относительно тела человека, блока управления приводами, основанного на интегральных контролерах, и радиоприемнике, электропроводных элементов, соединяющих блок управления с приводами движения рычагов. Аккумуляторный источник питания, основанный на литиево-марганцевых ячейках, может быть выполнен в различной геометрической форме с массой, не превышающей 50 кг с удельной емкостью в диапазоне от 378 до 418 ватт-часов на килограмм, крепится к каркасу с тыльной стороны экзоскелета при помощи пружинных захватов.
Технический результат изобретения направлен на снижение потребления экзоскелетом электроэнергии, с одновременным увеличением точности повторения движений элементов экзоскелета, их максимального усилия и запаса времени автономной работы, что обеспечит наиболее эффективное выполнение военнослужащим боевых задач. Данный технический результат возможен при выполнении описанных выше конструктивных особенностей, поскольку указанное количество рычагов позволяет в точности копировать возможные траектории движения частей человеческого тела и все возможные степени свободы суставов человеческого скелета. Конструкция приобретает такое свойство ввиду идентичной пропорции длин рычагов относительно костно-хрящевого аппарата человека, в результате чего при нагружении каркаса отсутствует дополнительное сопротивление мышц оператора экзоскелета. Линейные размеры приводов движения основаны на факте того, что изменение величины их геометрических параметров, под воздействием внешних сил, генерирует изометрически нагрузку до 4,0 МПа см3/g, что в 32 раза выше, чем у природных скелетных мышц. Использование в качестве крепления к рычагам приводов движения синтетических тканевых лент, пропитанных эпоксидной смолой, является наиболее доступным и технологичным способом, осуществление которого позволяет не деформировать и не повреждать материал приводов, что в свою очередь влияет на количество и геометрические размеры последнего.
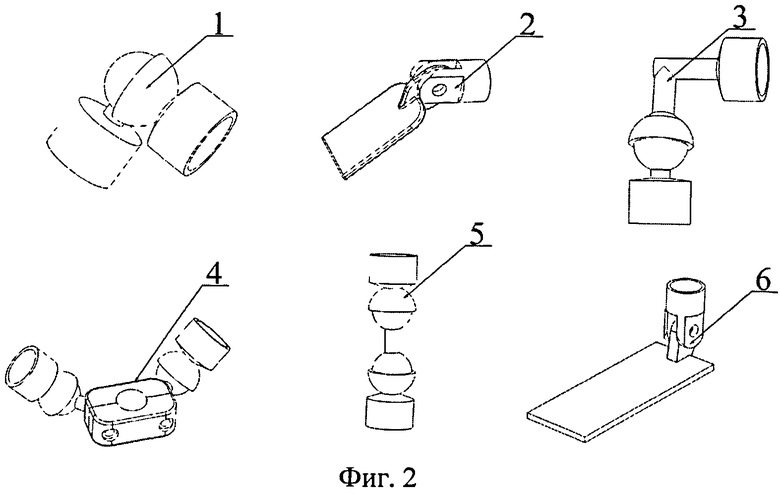
На фиг. 1 изображены три проекции общевойскового экзоскелета, где рычаги из углепластиковых труб соединены с шарнирными соединениями 1 в зонах локтевого, коленного и плечевого суставов человека шарнирными соединениями 2 в зоне кистей, шарнирным соединением 3 в зоне бедер, шарнирным соединением 6 в зоне голеностопа. Соединительный элемент 4 состоит из двух половин и крепится к центральной трубе каркаса на болтовые соединения, охватывая ее с двух сторон, на тыльной стороне крепления имеются два симметричных шаровых элемента, которые при соединении с трубами плечевых рычагов образуют шарниры. Соединительный элемент 5 состоит из двух шарнирных соединений, которые связывают центральную трубу с трубой поясничного отдела каркаса. Приводы движения рычагов каркаса 71-718, выполненные из гибкого аэрогеля углеродных нанотрубок, крепятся к трубам каркаса и приводят в движения рычаги, сокращаясь по длине при воздействии электрического тока. Блок электронной системы управления экзоскелетом 8 и аккумуляторный источник питания 9 крепятся к центральной трубе каркаса с тыльной стороны экзоскелета на пружинные захваты. Углепластиковая панель 10 крепится к центральной трубе каркаса с фронтальной стороны. На фиг. 2 изображены типы шарнирных соединений, применяемых в каркасе общевойскового экзоскелета.
Осуществление универсального общевойскового экзоскелета может быть произведено в следующем примере. Военнослужащий (оператор) закрепляет на себе с помощью гибких элементов крепления в области рук, ног и торса каркас экзоскелета, представленного на фиг. 1. Далее, выполняя поставленную задачу по передвижению в указанное место или перемещению каких-либо грузов, оператор совершает свойственные человеку движения частей тела (ног, рук, туловища). Система управления экзоскелетом определяет во времени и пространстве скоростные показатели и координаты частей тела и элементов каркаса и посылает соответствующие электрические сигналы на приводы движения рычагов каркаса, которые начинаю сокращаться, повторяя движения человека с одновременным пропорциональным увеличением вектора усилия по направлению движения. Таким образом, оператор экзоскелета приобретает возможность ускоренного передвижения или перемещения грузов с наименьшими затратами собственных усилий, что повышает эффективность выполнения поставленных задач.
Универсальность экзоселета обусловлена возможностью его применения не только в целях перемещения грузов, например боезапаса (ракеты, авиабомбы, снаряды) авиационной или автобронетанковой техники, но и в качестве боевого костюма, который позволит ускорить передвижение военнослужащего и обеспечить его живучесть за счет возможности установки дополнительного вооружения и средств защиты. Универсальный общевойсковой экзоскелет предназначен для всех родов и видов войск, поскольку основные задачи всех подразделений (мотострелковые, авиация, речной и морской флот и т.д.) подразумевают как обеспечение боевых действий, так и непосредственное участие в них, где необходимы сила, быстрота и выносливость военнослужащих.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бионический экзоскелет | 2017 |
|
RU2645804C1 |
| Пассивный реабилитационный экзоскелет | 2017 |
|
RU2665386C1 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| АППАРАТ ПОМОЩИ ПРИ ХОДЬБЕ С СИСТЕМОЙ ОПРЕДЕЛЕНИЯ ЖЕЛАТЕЛЬНЫХ ПАРАМЕТРОВ ШАГА В СРЕДЕ С ПРЕПЯТСТВИЯМИ | 2016 |
|
RU2636419C1 |
| Экзоскелет | 2023 |
|
RU2823489C1 |
| Промышленный экзоскелет для верхних и нижних конечностей | 2021 |
|
RU2793174C1 |
| АКТИВНЫЙ МОДУЛЬ СПИНЫ ЭКЗОСКЕЛЕТА | 2023 |
|
RU2825044C1 |
| ГРУЗОВОЙ ЭКЗОСКЕЛЕТ, СПИННОЙ КАРДАННЫЙ УЗЕЛ И КОЛЬЦЕВОЙ КАРДАН ГРУЗОВОГО ЭКЗОСКЕЛЕТА | 2014 |
|
RU2563209C2 |
| Общевойсковая нашлемная система отображения информации, управления и целеуказания | 2019 |
|
RU2730727C1 |
| ПЕРЕНОСНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОГНЕВОЙ ПОДДЕРЖКИ И БОЕВОГО ОБЕСПЕЧЕНИЯ | 2019 |
|
RU2725942C1 |
Изобретение относится к области военной робототехники и может быть использовано для пропорционального увеличения усилий при движениях военнослужащего, выполняющего боевую задачу, а также в повседневной жизни для перемещения грузов. Экзоскелет содержит каркасную систему, приводы движения, электронную систему управления и аккумуляторный источник питания. Каркасная система состоит из углепластиковой панели, повторяющей форму тыловой части торса человека, и шарнирно соединенных рычагов из углепластиковых труб. При этом приводы движения рычагов каркаса выполнены из твердотельного аэрогеля из углеродных нанотрубок с примесью каучука в виде цилиндров диаметром от 40 до 120 мм с конусным заострением с двух сторон. Приводы прикреплены к рычагам путем защемления конусных концов синтетическими тканевыми лентами, пропитанными эпоксидной смолой и стянутыми стальными заклепками. Изобретение направлено на снижение потребления электроэнергии с одновременным увеличением точности повторения движений элементов экзоскелета, их максимального усилия и запаса времени автономной работы, что обеспечит наиболее эффективное выполнение военнослужащим боевых задач. 2 ил.
Общевойсковой экзоскелет, содержащий каркасную систему, приводы движения, электронную систему управления и аккумуляторный источник питания, отличающийся тем, что каркасная система состоит из углепластиковой панели, повторяющей форму тыловой части торса человека, и 16 рычагов, выполненных из углепластиковых труб диаметром 40-50 мм и соединенных 16 шарнирными соединениями, взаимное расположение которых повторяет основные анатомические механизмы двигательного аппарата человеческого скелета, при этом приводы движения рычагов каркаса выполнены из твердотельного аэрогеля из углеродных нанотрубок с примесью каучука в виде цилиндров диаметром от 40 до 120 мм с конусным заострением с двух сторон, прикрепленных к рычагам путем защемления конусных концов синтетическими тканевыми лентами, пропитанными эпоксидной смолой и стянутыми стальными заклепками.
| WO 2008094191 A2, 07.08.2008; | |||
| Искусственные мышцы из нанотрубочных аэрогелей | |||
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| NanoWeek, 16 - 22 марта 2009 г, No | |||
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |

