Изобретение относится к радиотехнике и может быть использовано в радиолокации при определении угловых координат цели с помощью линейной антенной решетки.
Из уровня техники известен способ измерения угловой координаты объекта (патент на изобретение RU №2274874, опубликовано 20.04.2006 г., МПК G01S 13/00, G01S 13/44). Способ включает излучение зондирующих сигналов, прием отраженных сигналов не менее чем при двух положениях луча антенны, разнесенных по угловой координате, измерение амплитуд принятых сигналов, соответствующих этим положениям луча, вычисление угловой координаты объекта. При каждом угловом положении луча дополнительно определяют отклонение луча от нормали антенны и на основании этого определяют его ширину, после чего вычисляют угловую координату объекта.
К недостаткам данного способа можно отнести возможность определения только одной угловой координаты объекта.
Известен способ измерения угловой координаты объекта (патент на изобретение RU №2426147, опубликовано 10.08.2011 г., МПК G01S 13/06). В способе измерения угловой координаты объекта в процессе обзора пространства радиолокационной станцией, включающем излучение зондирующих сигналов, прием и обнаружение отраженных от объекта сигналов, измерение и запоминание уровней принятых сигналов и угловых координат луча, соответствующих принятым сигналам, выделение в принятых сигналах пачек импульсов от каждого из объектов, вычисляют угловую координату объекта в результате оценки коэффициентов параболической огибающей выделенных пачек импульсов.
К недостаткам данного способа можно отнести возможность определения только одной угловой координаты объекта.
Известен способ определения угловых координат источника вертикальной наземной ФАР (патент на изобретение RU №1840017, опубликовано 27.06.2006 г., МПК G01S 3/14). Способ основан на образовании последовательности временных выборок сигналов из приемных каналов элементов ФАР по вертикали, измерении положения максимума спектра этой последовательности, по значению которого определяют угловую координату, формируют дополнительную последовательность временных выборок сигналов из приемных каналов ФАР по вертикали. Причем обе последовательности выборок разделяют друг относительно друга временным интервалом, длительность которого пропорциональна расстоянию между нижним элементом ФАР и поверхностью земли, а угловую координату измеряют по положению максимума спектра сигнала, разделенных временным интервалом.
К недостаткам данного способа можно отнести возможность определения только одной угловой координаты объекта.
Наиболее близким к предлагаемому является способ измерения угловой координаты объекта (патент на изобретение RU №2317567, опубликовано 20.02.2008 г., МПК G01S 13/44), который и выбран в качестве прототипа. Сущность способа заключается в излучении зондирующих сигналов, приеме отраженных сигналов не менее чем при двух положениях луча антенны, разнесенных по угловой координате, измерении амплитуд принятых сигналов, соответствующих этим положениям луча, определении ширины луча на основе измерения отклонения луча от нормали антенны при каждом его угловом положении, вычислении угловой координаты объекта, определении угловой скорости движения объекта, на основе фиксации временного интервала, характеризующего динамику изменения текущих угловых положений объекта относительно заданных значений, определении углового ускорения движения объекта на основе фиксации временного интервала, характеризующего динамику изменения текущих значений угловой скорости движения объекта относительно заданных значений. К недостаткам данного способа можно отнести то, что при его использовании возможно получение информации об угловой координате объекта только в одной плоскости, обычно, азимутальной, тогда как для полноценного функционирования большинства радиолокационных систем требуется знание двух угловых координат (азимута и угла места).
Известно, что линейные антенные решетки обладают узкой диаграммой направленности в плоскости, в которой лежит антенная решетка (для горизонтальных антенных решеток - это плоскость азимута цели) и широкой диаграммой направленности - в плоскости, перпендикулярной линии антенной решетки (для горизонтальных антенных решеток - это плоскость угла места цели). В первом случае ширина диаграммы направленности определяется размерами антенной решетки и амплитудно-фазовым распределением на ее раскрыве, во втором случае ширина диаграммы направленности определяется свойствами одиночного излучателя антенной решетки. Таким образом, считается, что линейные антенные решетки могут определять положение цели только в одной плоскости.
В настоящее время средства радиолокации все активнее используются на самых разнообразных гражданских и военных объектах, при этом количество мест, пригодных для установки антенных решеток, весьма ограничено. Например, на воздушных судах для размещения дополнительных линейных антенных решеток переднего обзора пригодны только передние кромки крыльев, позволяющие установить достаточно длинную антенную решетку в виде горизонтальной линейки излучателей. Подобная антенная решетка обеспечивает измерение двух координат цели - дальности и азимута. Для полноценного обзора пространства необходимо знание третьей координаты - угла места.
Технический результат изобретения заключается в расширении возможности определения координат цели при использовании линейной антенной решетки с электронным сканированием.
Технический результат достигается тем, что способ определения угловых координат цели с помощью линейной антенной решетки включает излучение зондирующих сигналов, прием отраженных сигналов, не менее чем при двух положениях луча антенной решетки, разнесенных по угловой координате, измерение амплитуд принятых сигналов, соответствующих этим положениям луча, определение первой угловой координаты цели (азимута). При этом он отличается от прототипа тем, что определение второй угловой координаты цели (угла места) с помощью линейной антенной решетки дополнительно включает следующие этапы:
- определяют точки нахождения цели относительно объекта-носителя в определенные моменты времени, при изменении его ориентации в пространстве;
- производят измерение угловой координаты цели (азимута) для каждой из данных точек с помощью линейной антенной решетки с электронным сканированием;
- определяют линии возможных положений цели по второй угловой координате (углу места) с учетом известного характера искривления диаграммы направленности линейной антенной решетки при электронном сканировании для каждой измеренной первой угловой координаты (азимута);
- сдвигают линии возможных положений цели по второй угловой координате (углу места) на величину изменения ориентации объекта-носителя в пространстве, произошедшего за интервал времени между ними;
- находят точку пересечения сдвинутых линий цели, которая соответствует угловым координатам цели.
Сущность предлагаемого способа определения угловых координат цели с помощью линейной антенной решетки поясняется рисунками Фиг. 1 - Фиг. 3, на которых представлено следующее:
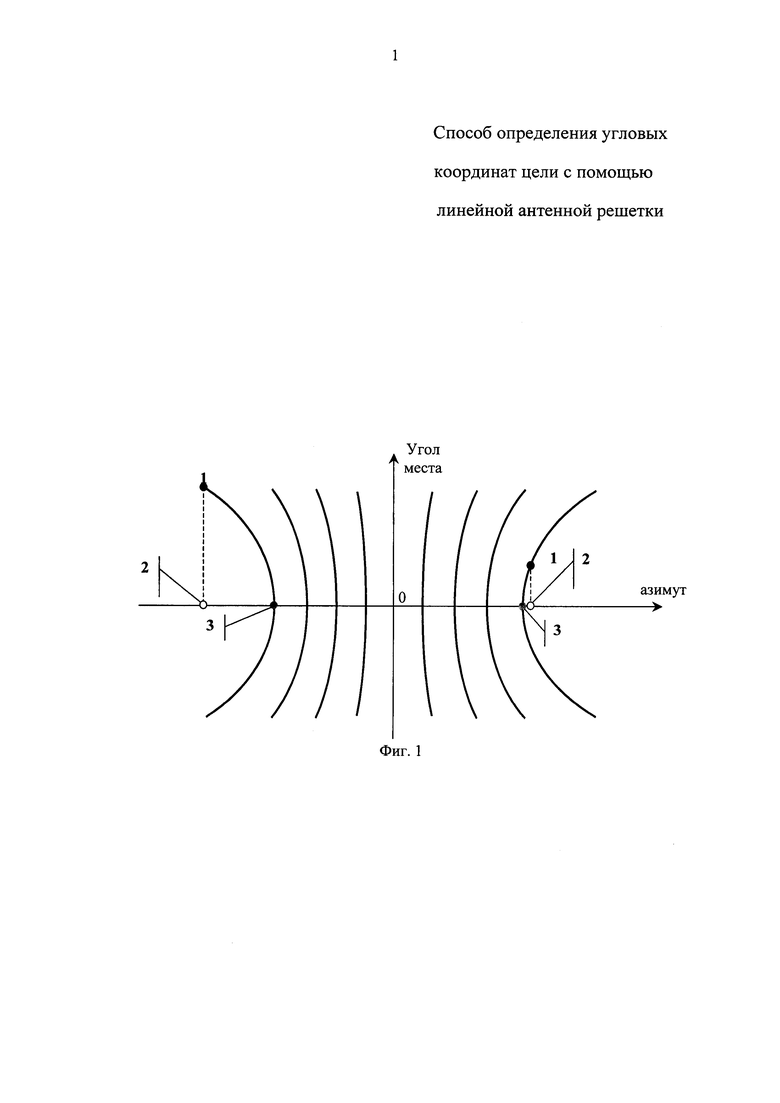
Фиг. 1 - семейство диаграмм направленности (ДН) линейной антенной решетки, лежащей в горизонтальной плоскости при электронном сканировании, имеющих характерное искривление по углу места, где изображены: цель 1, истинный азимут цели 2, измеренный азимут цели 3;
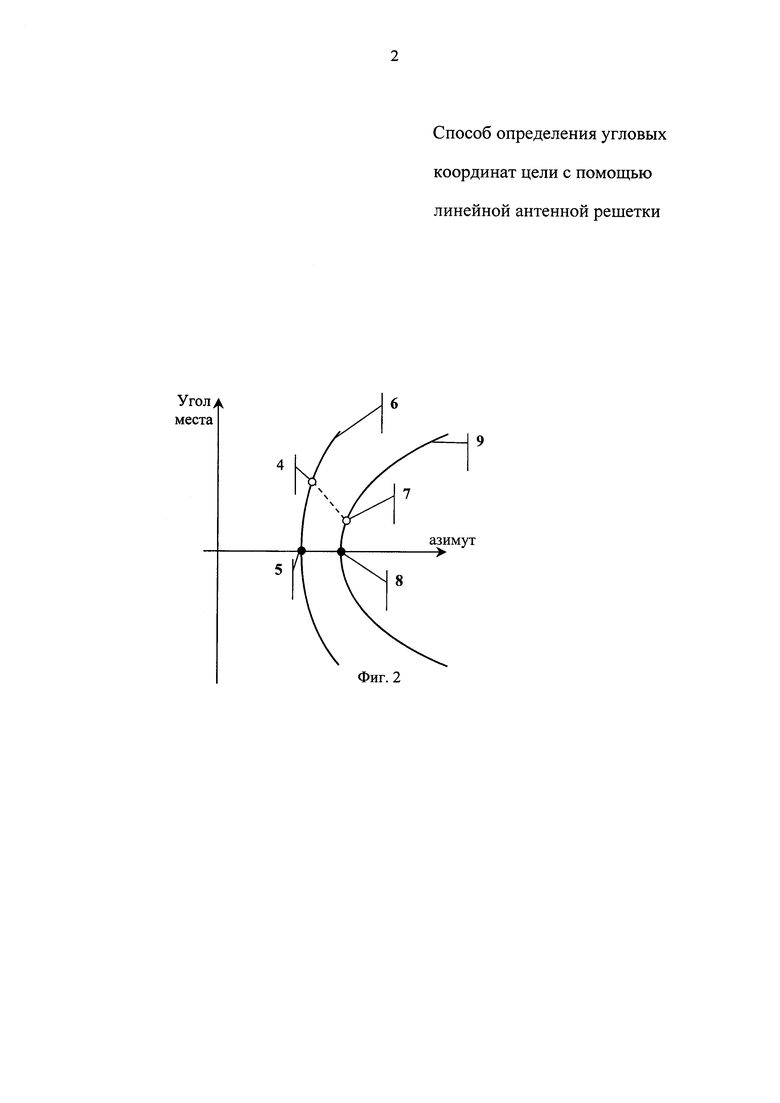
Фиг. 2 - линии цели для двух измеренных азимутов, соответствующих двум положениям цели в пространстве относительно линейной антенной решетки, где представлены первое положение цели 4, первый измеренный азимут 5, линия цели для первого измеренного азимута 6, второе положение цели 7, второй измеренный азимут 8, линия цели для второго измеренного азимута 9;
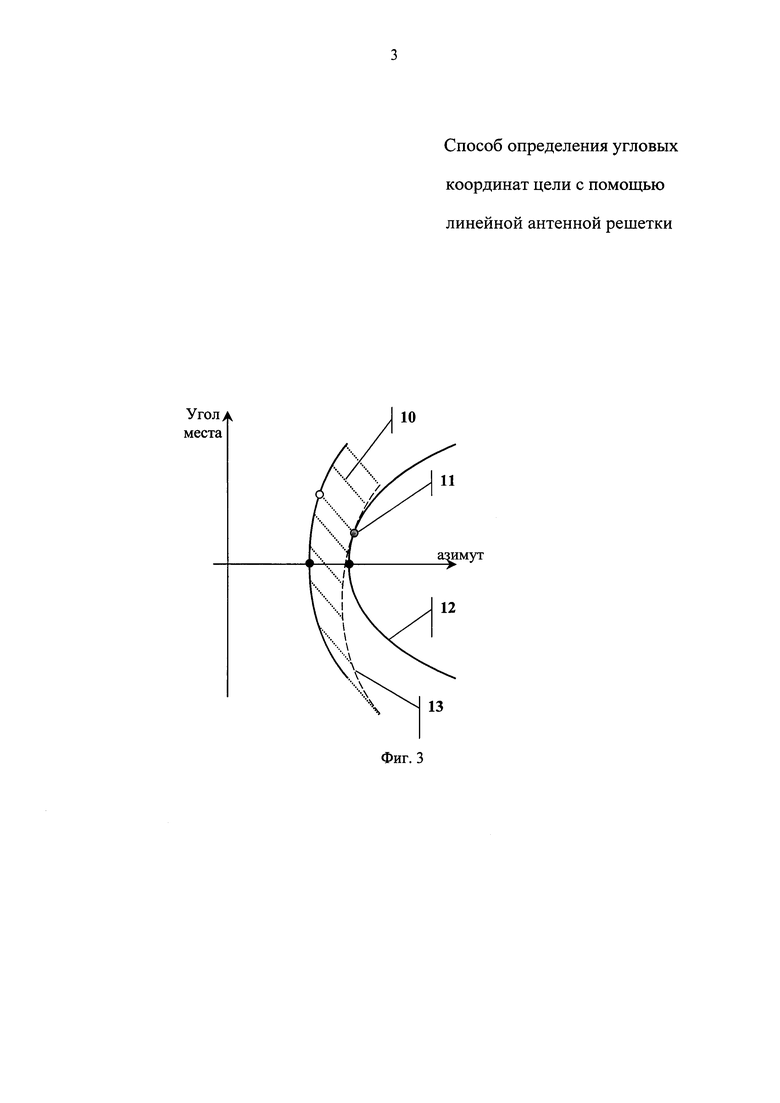
Фиг. 3 - сдвинутые в соответствии с изменением пространственной ориентации объекта-носителя линии цели и точка их пересечения, где представлено: смещение цели после изменения ориентации объекта-носителя 10, точка пересечения, соответствующая истинному положению цели 11, линия возможного положения цели для второго измеренного азимута 12, линия цели после изменения ориентации объекта-носителя.
Использование зависимости между измеряемым и реальным азимутом цели от ее угла места составляет суть предлагаемого способа.
Определение угла места цели с помощью линейной антенной решетки производят с использованием особенностей диаграммы направленности линейных антенных решеток, на основе собранных за определенный период данных об измеренных линейной антенной решеткой азимуте цели и параметрах пространственной ориентации носителя (курс, крен, тангаж), на котором установлена линейная антення решетка.
Вследствие того, что геометрическая фигура, образованная точками синфазного сложения сигналов, излучаемых линейной антенной решеткой, представляет собой конус, осью симметрии которого выступает сама линейная антенная решетка, а угол раскрыва зависит от амплитудно-фазового распределения, диаграмма направленности в плоскости, перпендикулярной плоскости сканирования, искажается при отклонении от нормали к линейной антенной решетке.
Схематично характер искажения диаграммы направленности линейной антенной решетки (ДН) представлен на Фиг. 1, где представлено семейство диаграмм направленности линейной антенной решетки, лежащей в горизонтальной плоскости, ноль азимута совпадает с направлением нормали к линейной антенной решетке.
На рисунке Фиг. 1 видно, что степень искажения нарастает при увеличении отклонения диаграммы направленности от нормали к линейной антенной решетке, при этом возникает ошибка между истинным азимутом цели 2 и измеренным азимутом 3, причем величина этой ошибки зависит от угла места цели.
В качестве примера использования предлагаемого способа определения угловых координат цели с помощью линейной антенной решетки предлагается вариант для движущегося, меняющего ориентацию в пространстве объекта-носителя (например, воздушного судна), оснащенного горизонтальной линейной антенной решеткой. Будем считать, что обнаруживаемая цель находится достаточно далеко и параметры ее движения не влияют на ее азимут и угол места относительно объекта-носителя.
На начальном этапе определяют точку нахождения цели относительно объекта-носителя в определенный момент времени (на Фиг. 2 - точка 4).
С помощью линейной антенной решетки производят измерение азимута цели (на Фиг. 2 - точка 5).
Определяют линию цели с учетом известного характера искажения диаграммы направленности (на Фиг. 2 - линия 6).
Спустя определенный промежуток времени объект-носитель изменяет свою ориентацию в пространстве, при этом изменяется и видимое положение цели (на Фиг. 2 - точка 7).
С помощью линейной антенной решетки производят второе измерение азимута цели (на Фиг. 2 - точка 8).
Определяют линию цели, учитывая известный характер искажения диаграммы направленности (на Фиг. 2 - линия 9).
Далее, с учетом известного изменения ориентации в пространстве объекта-носителя и соответствующего ему смещения положения цели, каждая точка линии цели первого измеренного азимута смещается к новому положению цели (на Фиг. 3 - смещение цели 10 после изменения ориентации объекта-носителя), таким образом, все точки прогнозируемого положения цели образуют новую линию (на Фиг. 3 - линия 13).
Поскольку изначально было принято, что угловые координаты цели относительно объекта-носителя практически неизменны (цель находится далеко и ее угловые перемещения малы), то изменение ориентации объекта-носителя однозначно определяет относительное изменение направления на цель. Так как линейная антенная решетка определяет только одну угловую координату, то цель может находиться в любой из точек, образующих линию цели. Если после этого объект-носитель меняет ориентацию, то после пересчета всех точек линии цели мы получим соответствующие точки сдвинутой линии цели (на Фиг. 3 - линия 13), одна из которых является истинным положением цели. Так как истинное положение цели единственное и оно одинаково для всех сдвинутых линий цели, то точка пересечения сдвинутых линий цели и есть истинное положение цели, поскольку она лежит сразу на всех линиях (возможны случаи появления неоднозначности, когда точек пересечения более одной, тогда необходимо проводить дополнительные измерения азимута и строить дополнительные линии цели до устранения неоднознаности).
Таким образом, для рассматриваемого примера, приведенного на Фиг. 3, пересечение линии цели для второго измеренного азимута 12 и линии цели после изменения ориентации объекта-носителя 13, полученной сдвигом точек линии цели первого измеренного азимута, дает истинное положение цели, включающее в себя азимут и угол места.
Измерение дальности при этом производится обычным радиолокационным методом.
Таким образом, предлагаемый способ определения угловых координат цели с помощью линейной антенной решетки позволяет получить все три координаты цели: дальность, азимут и угол места.
Предложенный способ определения угловых координат цели с помощью линейной антенной решетки является универсальным и подразумевает различные использования: циклические повторения при сопровождении цели, использование большего числа измеренных азимутов и линий прогноза для увеличения точности и устранения возможной неоднозначности измерений, использование для линейных антенных решеток различной ориентации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2011 |
|
RU2478981C2 |
| СПОСОБ ТОМОГРАФИЧЕСКОЙ РЕГИСТРАЦИИ НАКЛОННОЙ ДАЛЬНОСТИ И АЗИМУТА ПОЛОЖЕНИЯ НАДВОДНЫХ ОБЪЕКТОВ И ОБЪЕКТОВ НАД ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТЬЮ | 2021 |
|
RU2760976C1 |
| Способ обзора воздушного пространства импульсно-доплеровской радиолокационной станцией с активной фазированной антенной решеткой | 2022 |
|
RU2794466C1 |
| ВЕРТОЛЕТНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2344439C1 |
| Способ обзорной трехкоординатной двухпозиционной латерационной радиолокации авиационно-космических объектов | 2019 |
|
RU2717970C1 |
| СПОСОБ ПОВЫШЕНИЯ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ РЛС ПО АЗИМУТУ И ДАЛЬНОСТИ И УМЕНЬШЕНИЯ ВРЕМЕНИ СКАНИРОВАНИЯ НАЗЕМНЫХ ОБЪЕКТОВ ПРИ ПОСАДКЕ САМОЛЕТА И ПРИЕМНОЕ УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 2018 |
|
RU2682169C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ В НЕЛИНЕЙНОМ РАДИОЛОКАТОРЕ | 2015 |
|
RU2593595C1 |
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| Способ определения направления на цель цифровой антенной решеткой моноимпульсной радиолокационной станции | 2021 |
|
RU2761106C1 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ВОЗДУШНОГО ОБЪЕКТА | 2014 |
|
RU2567850C1 |
Изобретение относится к радиотехнике и может быть использовано в радиолокации при определении угловых координат цели с помощью линейной антенной решетки. Достигаемый технический результат - расширение возможности определения координат цели при использовании линейной антенной решетки. Указанный результат достигается тем, что осуществляют излучение зондирующих сигналов, прием отраженных сигналов не менее, чем при двух положениях луча антенной решетки, разнесенных по угловой координате, измерении амплитуд принятых сигналов, соответствующих этим положениям луча, определении ширины луча, на основе измерения отклонения луча от нормали антенной решетки, при каждом его угловом положении, вычислении угловой координаты объекта, при этом измерение азимута цели относительно объекта-носителя производят в течение ряда моментов времени, характеризующихся изменением ориентации объекта-носителя в пространстве, затем для каждого измерения выстраивают линию возможных положений цели по другой угловой координате с учетом известного характера искривления диаграммы направленности линейной антенной решетки при электронном сканировании, производят сдвиг линий цели в соответствии с произошедшим за интервал времени между ними изменением ориентации объекта-носителя в пространстве и находят точку пересечения сдвинутых линий цели, соответствующую угловым координатам цели. 3 ил.
Способ определения угловых координат цели с помощью линейной антенной решетки, включающий излучение зондирующих сигналов, прием отраженных сигналов не менее, чем при двух положениях луча антенной решетки, разнесенных по азимуту цели, измерение амплитуд принятых сигналов, соответствующих этим положениям луча, определение ширины луча, на основе измерения отклонения луча от нормали антенной решетки, при каждом его угловом положении, определение азимута цели, отличающийся тем, что измерение азимута цели относительно объекта-носителя производят в течение ряда моментов времени, характеризующихся изменением ориентации объекта-носителя в пространстве, после чего для каждого измерения выстраивают линию возможных положений цели по углу места цели с учетом известного характера искривления диаграммы направленности линейной антенной решетки при электронном сканировании, производят сдвиг линий цели в соответствии с произошедшим за интервал времени между ними изменением ориентации объекта-носителя в пространстве и находят точку пересечения сдвинутых линий цели, соответствующую азимуту цели и углу места цели.
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ КООРДИНАТЫ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2317567C1 |
| ПЕЛЕНГАТОР В ДВУХ ПЛОСКОСТЯХ | 1998 |
|
RU2134430C1 |
| Прибор для определения периода колебаний моделей | 1960 |
|
SU146508A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2011 |
|
RU2495449C2 |
| US 6661376 b2, 09.12.2003 | |||
| JP 2005233673 A, 02.09.2005 | |||
| EP 1904870 B1, 20.04.2016. | |||

