Изобретение относится к области радиолокации и радионавигации, а именно к системам измерения углового положения.
Известно, что систему пеленгации с двух плоскостях можно создать простой комбинацией двух систем, одна из которых предназначена для работ в азимутальной плоскости, а вторая - в угломестной. (Пример аналога для моноимпульсной системы приведен с книге: Моноимпульсная радиолокация. А. И. Леонов, К.И.Фомичев. М.: Радио и связь, 1984, с. 76, пример аналога для измерителя, где угловые координаты определяются методом интерферометра, приведен в книге: Справочник по радиолокации. /Под ред. М.Сколник. Радиолокационные устройства и системы. М.: Советское радио, т.3, 1979, с. 452).
Система пеленгации в одной плоскости (прототип) может быть выполнена в виде устройства, содержащего антенну с коммутируемыми диаграммами направленности на высокой частоте, последовательно соединенное с ней одноканальное приемное устройство, выход которого соединен с угловым дискриминатором, и устройство формирования команд, соединенное с входом коммутации диаграмм направленности антенны и синхронизирующим входом углового дискриминатора. Это устройство соответствует устройству, которое описано в книге: Моноимпульсная радиолокация. А.И.Леонов, К.И.Фомичев. М.:Радио и связь, 1984, с. 196.
При простой комбинации двух одноканальных систем пеленгации устройство формирования команд может быть общим, поскольку для их работы требуются наборы, содержащие команды одинакового вида.
Однако пеленгаторы с одноканальным приемным устройством чувствительны к флюктуациям амплитуды принимаемых сигналов, что снижает точность измерения угловой координаты. Это наиболее существенный недостаток одноканального метода пеленгования (Моноимпульсная радиолокация. А.И.Леонов, К.И.Фомичев. М.: Радио и связь, 1984, с. 196).
В заявляемом изобретении для повышения точности измерения угловых координат предлагается при определении угловой координаты в одной из плоскостей использовать данные с выходов приемных устройств обоих плоскостей, в совокупности которых, как оказывается, содержится информация о флюктуациях амплитуды.
Решаемая в заявляемом изобретении задача состоит в реализации возможности получения дополнительной информации о флюктуациях амплитуды принятого сигнала и в реализации возможности использования этой информации для повышения точности измерения угловой координаты в каждой из двух плоскостей.
Для решения поставленной задачи в пеленгатор в двух плоскостях, состоящий из двух каналов, каждый из которых содержит антенну с коммутируемой диаграммой направленности, приемное устройство, вход которого подключен к выходу антенны, и угловой дискриминатор, общее для двух каналов устройство формирования команд, выходы которого подключены ко входам управления коммутацией диаграмм направленности антенн и ко входам синхронизации угловых дискриминаторов вводятся два идентичных блока коррекции данных, по одному в каждый канал. Первый вход первого блока коррекции данных подключается к выходу приемного устройства первого канала, а второй вход подключается к выходу приемного устройства второго канала. Первый вход второго блока коррекции данных подключается к выходу приемного устройства второго канала, а второй вход к выходу приемного устройства первого канала. Выход первого блока коррекции данных подключается ко входу углового дискриминатора первого канала. Выход второго блока коррекции данных подключается ко входу углового дискриминатора второго канала. Третьи входы блоков коррекции данных подключены к устройству формирования команд и являются управляющими входами.
Технический результат достигается следующим образом. На блок коррекции данных каждого канала поступают две последовательности сигналов с выходов антенн и обработанных в приемных устройствах. Первая последовательность соответствует последовательности состояний собственной антенны данной плоскости с коммутируемыми диаграммами направленности. Вторая последовательность соответствует последовательности состояний антенны с коммутируемыми диаграммами направленности другой плоскости. Путем сравнения сигналов этих двух последовательностей определяется последовательность амплитуд сигналов на входах антенн. В блоке коррекции данных происходит также нормировка последовательности сигналов на выходе приемного устройства на определенную последовательность амплитуд. При этом на входы угловых дискриминаторов с выходов блоков коррекции поступают сигналы, соответствующие постоянной амплитуде сигнала на входе антенн. Тем самым исключается влияние изменения амплитуды сигнала на входе антенн от состояния к состоянию антенн с коммутируемыми диаграммами направленности и повышается и точность измерения угловых координат.
На чертеже показана функциональная схема пеленгатора в двух плоскостях. В состав пеленгатора входят антенны с коммутируемыми диаграммами направленности 1, одноканальные приемные устройства с цифровым выходом 2, блоки коррекции данных 3, угловые дискриминаторы 4, устройство формирования команд 5.
Антенна с коммутируемыми диаграммами направленности может быть выполнена в виде линейной антенной решетки и управляемой диаграммообразующей схемы (Р. А. Монзинго, Т. У. Миллер. Адаптивные антенные решетки. М.: Радио и связь, 1986, с. 12).
Приемное устройство с цифровым выходом 2 может быть выполнено с рамках общей структуры радиолокационного приемника (Справочник по радиолокации. /Под ред. Н. Сколник. Радиолокационные устройства и системы. М.: Советское радио, 1979, т.3, с. 137).
Конкретное выполнение блока коррекции данных 3 возможно в виде известной структуры (Щелкунов Н.Н., Дианов А.П. Микропроцессорные средства и системы. М. : Радио и связь, 1989, с. 203). В основе этой структуры лежит микроконтроллер (наиболее массовый класс микроЭВМ) мМС1204.
В состав микроконтроллера входит центральный процессор, постоянное запоминающее устройство, оперативное запоминающее устройство, два последовательных интерфейса и параллельный интерфейс. Системный таймер совместно с системой прерывания обеспечивает поддержку режима реального времени. Внутрисистемная магистраль организует многоплатные расширения микроконтроллера с помощью специальных и системных модулей, таких как модуль ввода-вывода или системная память (Там же, стр. 204). В частности, она позволяет ввести еще один дополнительный параллельный интерфейс.
Наличие этих составляющих позволяет обеспечить выполнение таким программируемым многофункциональным средством функций, предписываемых блоку коррекции данных.
Действительно, два параллельных интерфейса обеспечивают прием цифровой информации с двух приемных устройств с цифровым выходом, один последовательный интерфейс обеспечивает связь с устройством формирования команд и, следовательно, синхронность работы блока коррекции данных в составе пеленгатора, другой последовательный интерфейс обеспечивает передачу обработанных данных в угловой дискриминатор. Постоянное запоминающее устройство предназначено для хранения рабочих программ. В нем записываются программы приема данных с выходов приемных устройств обоих каналов, обработки данных согласно математическим выражениям, приведенным ниже при описании работы устройства, и передачи данных в угловой дискриминатор. Центральный процессор совместно со всеми составляющими обеспечивает исполнение записанных в постоянном запоминающем устройстве программ.
Угловой дискриминатор 4 выполняет ту же функцию, что и в прототипе, т.е. определение угловой координаты путем сравнения поступающих данных, и может быть реализован в виде устройства, аналогичного по структуре блоку 3, с двумя входами и одним выходом. На один вход поступают данные с выхода блока 3 , а на другой вход поступают команды с блока 5, обеспечивающие синхронность работы углового дискриминатора в составе пеленгатора. В постоянном запоминающем устройстве записываются программы приема данных с выхода блока коррекции данных 3, обработки данных с целью определения угловых координат согласно математическим выражениям, приведенным ниже, передачи данных потребителю угловых координат.
Блок 5 - устройство формирования команд по заданной программе также выполняет функцию, что и в прототипе. Для его реализации может быть использована та же структура, что и для блока 3, с двумя выходами, по одному на каждый канал пеленгатора, и одним входом для связи по управлению с системой, в которую может входить пеленгатор В постоянном запоминающем устройстве записываются программы последовательной выдачи сигналов управления на управляемые диаграммообразующей схемы блоков 1, соответствующие математическим выражениям, приведенным ниже, и программы, обеспечивающие работу пеленгатора в составе системы, в которую может входить пеленгатор.
Рассмотрим работу заявляемого устройства. Пусть, например, блоки 1 выполнены в виде линейной антенной решетки из двух элементов и диаграммообразующей схемы, в состав которой входят два управляемых фазовращателя. По командам блока 5 фазовращатели в диаграммообразующей схеме устанавливаются последовательно в состояния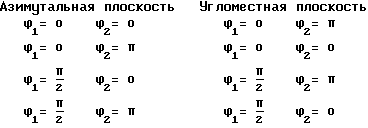
Амплитуды сигналов на выходах приемных устройств двух плоскостей соответственно равны



где a1,2,3,4 - последовательность амплитуд сигнала на входах антенны;
Ux, Uy - направляющие косинусы, соответствующие положению источника сигнала;
d - расстояние между антенными элементами в антенной решетке;
λ - длина волны.
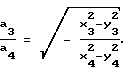
В блоках коррекции данных 3, в которые с выходов приемных устройств 2 обеих плоскостей поступают последовательности оцифрованных амплитуд сигналов с учетом порядка, задаваемым блоком 5, производится определение отношений амплитуд сигналов на входах антенн.
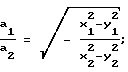
(Для простоты рассматриваем такую область угловых координат Ux, Uy где X2 2≠Y2 2 и X4 2≠Y4 2. При X2 2≠Y2 2 и X4 2≠ Y4 2 необходимо использовать другие последовательности состояний фазовращателей в блоках 1.)
Проводится также коррекция данных
X1 1 = X1; Y1 1 = Y1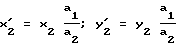
X'3 = X3; Y'3=Y3
В блоке 4 одной из плоскостей производится определение направляющего косинуса по откорректированным данным, поступающим из блока коррекции данных 3 с уечтом порядка, задаваемым блоком 5:
В блоке 4 второй из плоскостей:
После проведения всех математических действий оказывается, что
Значения  не зависят от значений a1,2,3,4, т.е. от флюктуации амплитуды принимаемого сигнала.
не зависят от значений a1,2,3,4, т.е. от флюктуации амплитуды принимаемого сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕЛЕНГАТОР В ОДНОЙ ПЛОСКОСТИ | 2004 |
|
RU2262120C1 |
| СПОСОБ ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ ПРИ ОБЗОРНОЙ МОНОИМПУЛЬСНОЙ АМПЛИТУДНОЙ СУММАРНО-РАЗНОСТНОЙ ПЕЛЕНГАЦИИ С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ (ВАРИАНТЫ) И ОБЗОРНЫЙ МОНОИМПУЛЬСНЫЙ АМПЛИТУДНЫЙ СУММАРНО-РАЗНОСТНЫЙ ПЕЛЕНГАТОР С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ И ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ | 2015 |
|
RU2583849C1 |
| МОНОИМПУЛЬСНЫЙ ФАЗОВЫЙ ПЕЛЕНГАТОР | 2007 |
|
RU2364882C2 |
| АМПЛИТУДНЫЙ ОДНОКАНАЛЬНЫЙ МНОГОЧАСТОТНЫЙ ПЕЛЕНГАТОР ШУМОВЫХ АКТИВНЫХ ПОМЕХ | 2005 |
|
RU2305850C2 |
| АМПЛИТУДНЫЙ ОДНОКАНАЛЬНЫЙ МНОГОЧАСТОТНЫЙ ПЕЛЕНГАТОР ШУМОВЫХ АКТИВНЫХ ПОМЕХ | 2006 |
|
RU2324196C2 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 2007 |
|
RU2361230C1 |
| Способ обзорной пассивной однопозиционной моноимпульсной трёхкоординатной угломерно-разностно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2017 |
|
RU2661357C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 2005 |
|
RU2297645C1 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
| Моноимпульсная волноводная антенная решетка | 2024 |
|
RU2824985C1 |
Изобретение относится к области радиолокации и радионавигации, а именно к системам измерения углового положения. Устройство содержит две одинаковые антенны с коммутируемыми диаграммами направленности, два одноканальных приемных устройства, два угловых дискриминатора, общее для двух каналов устройство формирования команд. Техническим результатом является уменьшение влияния флюктуаций амплитуды принимаемого сигнала на точность определения углового положения, что достигается введением двух блоков коррекции данных. Каждый блок по входам подключен к выходам приемных устройств обоих каналов пеленгатора. Выходы блоков подключены к входам соответствующих угловых дискриминаторов. 1 ил.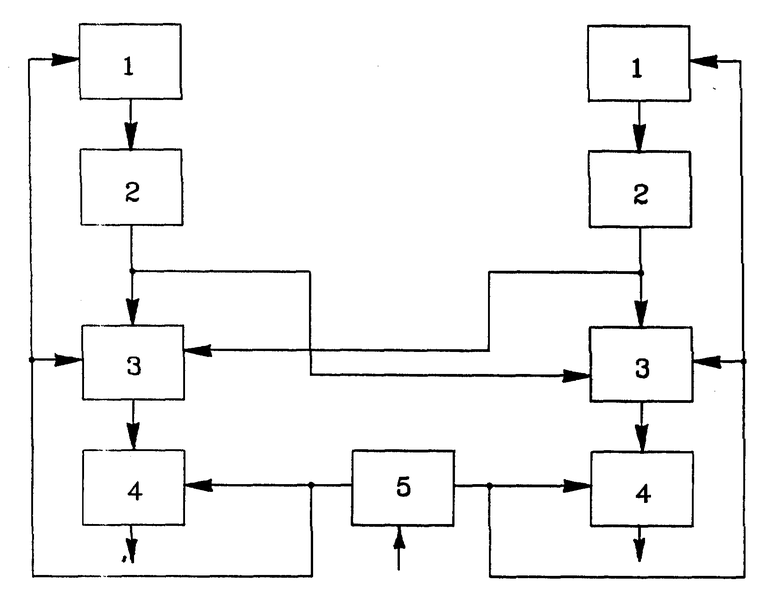
Пеленгатор в двух плоскостях, состоящий из двух каналов, каждый из которых содержит антенну с коммутируемой диаграммой направленности, приемное устройство, вход которого подключен к выходу антенны, и угловой дискриминатор, общее для двух каналов устройство формирования команд, выходы которого подключены к входам управления коммутацией диаграмм направленности антенн и к входам синхронизации угловых дискриминаторов, отличающийся тем, что в каждый канал пеленгатора вводится блок коррекции данных, причем первый вход первого блока коррекции данных подключен к выходу приемного устройства первого канала, а второй вход - к выходу приемного устройства второго канала, первый вход второго блока коррекции данных подключен к выходу приемного устройства второго канала, а второй вход - к выходу приемного устройства первого канала, третьи входы блоков коррекции данных подключены к устройству формирования команд, выход первого блока коррекции данных подключен к входу углового дискриминатора первого канала, выход второго блока коррекции данных - к входу углового дискриминатора второго канала.
| Леонов А.И., Фомичев К.И | |||
| Моноимпульсная радиолокация | |||
| -М.: Радио и связь, 1984, с.196 | |||
| Микропроцессорные средства и системы | |||
| - М.: Радио и связь, 1989, с.203 и 204 | |||
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 1996 |
|
RU2107305C1 |
| Объемный насос | 1986 |
|
SU1402711A2 |
| US 4646095 A1, 24.02.87. | |||

