Изобретение относится к области радиолокации и может быть использовано для измерения угловых координат объектов, а также для определения угловой скорости и ускорения перемещения объектов в радиолокационных станциях (РЛС) с фазированной антенной решеткой (ФАР).
Наиболее близким к изобретению является способ измерения угловой координаты объекта, заключающийся в излучении зондирующих сигналов, приеме отраженных сигналов не менее чем при двух угловых положениях луча антенны, разнесенных по угловой координате, измерении амплитуд принятых сигналов, соответствующих этим положениям луча, вычислении угловой координаты объекта, определении отклонение луча от нормали антенны при каждом угловом положении луча, определении его ширины в соответствии с формулой
Δi=Δн/cos(θiэ)+Δin, Δj=Δн/cos(θjэ)+Δjn,
где Δ - ширина луча антенны по уровню половинной мощности относительно максимума луча, Δi, Δj - ширина луча при i-м и j-м (i≠j) его положениях соответственно; θiэ, θjэ - измеренное отклонение луча от нормали антенны при электронном сканировании при i-м и j-м его положениях соответственно; Δiп, Δjn - программное изменение ширины луча при i-м и j-м его положениях соответственно; Δн - ширина луча при его положении на нормали антенны, после чего вычисляют угловую координату объекта в соответствии с формулами:
 где Δi≠Δj
где Δi≠Δj
 где Δi=Δj=Δ
где Δi=Δj=Δ
где θ0 - измеряемая угловая координата объекта; θi θj - угловые координаты луча при i-м и j-м (i≠j) его положениях соответственно; Ui, Uj - амплитуды принятого сигнала при i-м и j-м положениях луча соответственно (Патент РФ на изобретение №2274874, кл. G01S 13/00, 26.08.2004 г.).
Наиболее близким к изобретению является радиолокационная станция, содержащая последовательно соединенные устройство управления, передатчик, антенный переключатель, приемник, запоминающее устройство, счетно-решающее устройство, а также антенну, устройство управления лучом, блок определения ширины луча, при этом вход/выход антенны соединен с входом/выходом антенного переключателя, вход устройства управления лучом соединен со вторым выходом устройства управления, первый выход - с управляющим входом антенны, второй выход - со вторым входом запоминающего устройства, третий выход устройства управления соединен со вторым входом счетно-решающего устройства, первый и второй входы блока определения ширины луча соединены соответственно со вторым и третьим выходами устройства управления лучом, а выход соединен с третьим входом запоминающего устройства (Патент РФ на изобретение №2274874, кл. G01S 13/00, 26.08.2004 г.).
Недостатком данных способа и устройства является недостаточные функциональные возможности радиолокационной станции из-за невозможности определения угловой скорости и ускорения перемещения объектов.
Технической задачей изобретения является повышение функциональных возможностей радиолокационной станции за счет измерения не только угловых координат, а также угловой скорости и ускорения перемещения объекта.
Поставленная задача решается тем, что в способе измерения угловой координаты объекта, включающем излучение зондирующих сигналов, прием отраженных сигналов не менее чем при двух положениях луча антенны, разнесенных по угловой координате, измерение амплитуд принятых сигналов, соответствующих этим положениям луча, вычисление угловой координаты объекта, при каждом угловом положении луча определение отклонения луча от нормали антенны и на основании этого определение его ширины, в соответствии с формулой
Δi=Δн/cos(θiэ)+Δin, Δj=Δн/cos(θjэ)+Δjn,
где Δ - ширина луча антенны по уровню половинной мощности относительно максимума луча, Δi, Δj - ширина луча при i-м и j-м (i≠j) его положениях соответственно; θiэ, θjэ - измеренное отклонение луча от нормали антенны при электронном сканировании при i-м и j-м его положениях соответственно; Δin, Δjn - программное изменение ширины луча при i-м и j-м его положениях соответственно; Δн - ширина луча при его положении на нормали антенны, после чего вычисляют угловую координату объекта в соответствии с формулами:
 где Δi≠Δj
где Δi≠Δj
где θ0 - измеряемая угловая координата объекта; θi, θj - угловые координаты луча при i-м и j-м (i≠j) его положениях соответственно; Ui, Uj - амплитуды принятого сигнала при i-м и j-м положениях луча соответственно, дополнительно определяют угловые скорости движения объекта, на основе фиксации временных интервалов, характеризующих динамику изменения текущих угловых координат объекта относительно заданных значений, определяют угловое ускорение движения объекта на основе фиксации временного интервала, характеризующего динамику изменения текущих значений угловой скорости движения объекта.
Заявляемый способ реализуется в радиолокационной станции, содержащей последовательно соединенные устройство управления, передатчик, антенный переключатель, приемник, запоминающее устройство, счетно-решающее устройство, а также антенну, устройство управления лучом, блок определения ширины луча, при этом вход/выход антенны соединен с входом/выходом антенного переключателя, вход устройства управления лучом соединен со вторым выходом устройства управления, первый выход - с управляющим входом антенны, второй выход - со вторым входом запоминающего устройства, третий выход устройства управления соединен со вторым входом счетно-решающего устройства, первый и второй входы блока определения ширины луча соединены соответственно со вторым и третьим выходами устройства управления лучом, а выход соединен с третьим входом запоминающего устройства, куда дополнительно введен блок определения параметров движения объекта, вход которого соединен с выходами счетно-решающего устройства, первый и второй выходы являются соответственно выходом угловой скорости и ускорения движения объекта, блок определения параметров движения объекта содержит первое, второе и третье пороговые устройства, первый и второй элементы И, генератор импульсов, первый и второй элементы И-НЕ, первый и второй счетчики, первое, второе и третье вычитающие устройства, первый, второй и третий делители, а также задатчик сигналов, причем вход блока определения параметров движения объекта является первыми входами первого, второго и третьего пороговых устройств, вторые входы которых соединены с группой выходов задатчика сигналов, выход первого порогового устройства соединен одновременно с первыми входами первого вычитающего устройства и первого элемента И, второй вход которого соединен с выходом генератора импульсов, выход которого кроме того соединен со вторым входом второго элемента И, первый вход которого соединен с выходом второго порогового устройства, выход которого кроме того соединен одновременно с входом первого элемента И-НЕ, первым входом второго и вторым входом первого вычитающих устройств, выход которого соединен с первым входом первого делителя, второй вход которого через первый счетчик соединен с выходом первого элемента И, третий вход которого соединен с выходом первого элемента И-НЕ, выход третьего порогового устройства соединен одновременно со входом второго элемента И-НЕ и вторым входом второго вычитающего устройства, выход которого соединен с первым входом второго делителя, второй вход которого через второй счетчик соединен с выходом второго элемента И, третий вход которого соединен с выходом второго элемента И-НЕ, выход первого делителя соединен с первым входом третьего вычитающего устройства, второй вход которого соединен с выходом второго делителя, выход третьего вычитающего устройства соединен с первым входом третьего делителя, второй вход которого соединен с выходом второго счетчика, выходы первого и третьего делителей являются соответственно первым и вторым выходами блока определения параметров движения объекта.
Новыми признаками, обладающими существенными отличиями по способу, является следующая совокупность действий.
1. Определяют угловые скорости движения объекта, на основе фиксации временных интервалов, характеризующих динамику изменения текущих угловых координат объекта относительно заданных значений.
2. Определяют угловое ускорение движения объекта на основе фиксации временного интервала, характеризующего динамику изменения текущих значений угловой скорости движения объекта.
Существенными отличительными элементами по устройству радиолокационной станции является блок определения параметров движения объекта, состоящий из первого, второго и третьего пороговых устройств, первого и второго элементов И, генератора импульсов, первого и второго элементов И-НЕ, первого и второго счетчиков, первого, второго и третьего вычитающих устройств, первого, второго и третьего делителей, а также задатчика сигналов и связи между известными и новыми элементами.
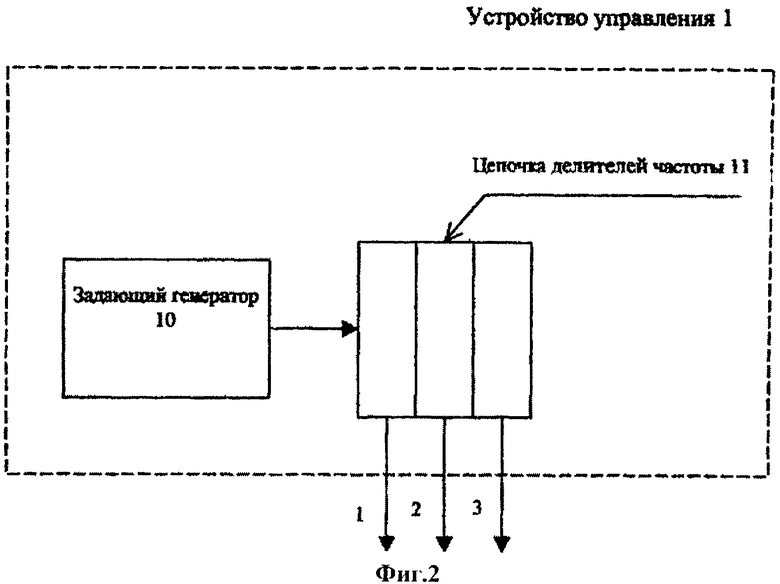
На фиг.1 показана блок-схема радиолокационной станции, на фиг.2 - блок-схема устройства управления, на фиг.3 - блок-схема устройства управления лучом, на фиг.4 - структурная схема блока определения параметров движения объекта.
Радиолокационная станция (фиг.1) содержит последовательно соединенные устройство управления 1, передатчик 2, антенный переключатель 3, приемник 4, запоминающее устройство 5, счетно-решающее устройство 6, а также антенну 7, вход/выход которой соединен со входом/выходом антенного переключателя 3, устройство управления лучом 8, вход которого соединен со вторым выходом устройства управления 1, первый выход - с управляющим входом антенны 7, второй выход - со вторым входом запоминающего устройства 5, устройство определения ширины луча 9. Кроме того, устройство управления 1 (фиг.2) и устройство управления лучом 8 (фиг.3) выполнены на основе задающего генератора 10 и последовательно соединенной с ним цепочки делителей частоты 11, блок 12 определения параметров движения цели, который состоит из первого 13, второго 14 и третьего 15 пороговых устройств, первого 16 и второго 17 элемента И, генератора 18 импульсов, первого 19 и второго 20 элементов И-НЕ, первого 21 и второго 22 счетчика, первого 23, второго 24 и третьего 25 вычитающих устройств, первого 26, второго 27 и третьего 28 делителей, а также задатчика 29 постоянных сигналов, при этом третий выход устройства управления 1 соединен со вторым входом счетно-решающего устройства 6, первый и второй входы устройства определения ширины луча 9 соединены соответственно со вторым и третьим выходами устройства управления лучом 8, выход его соединен с третьим входом запоминающего устройства 5, выход счетно-решающего устройства 6 соединен с входом блока 12 определения параметров движения объекта, вход которого соединен с первыми входами первого 13, второго 14 и третьего 15 пороговых устройств, вторые входы которых соединены с группой выходов задатчика 29 сигналов, выход первого 13 порогового устройства соединен одновременно с первыми входами первого 23 вычитающего устройства и первого 16 элемента И, второй вход которого соединен с выходом генератора 18 импульсов, выход которого соединен, кроме того, со вторым входом второго 17 элемента И, первый вход которого соединен с выходом второго 14 порогового устройства, выход которого соединен одновременно с входом первого 19 элемента И-НЕ, первым входом второго 24 и вторым входом первого 23 вычитающих устройств, выход которого соединен с первым входом первого 26 делителя, второй вход которого через первый 21 счетчик соединен с выходом первого 16 элемента И, третий вход которого соединен с выходом первого 19 элемента И-НЕ, выход третьего 15 порогового устройства соединен одновременно со входом второго 20 элемента И-НЕ и вторым входом второго 24 вычитающего устройства, выход которого соединен с первым входом второго 25 делителя, второй вход которого через второй 22 счетчик соединен с выходом второго 17 элемента И, третий вход которого соединен с выходом второго 20 элемента И-НЕ, выход первого 26 делителя соединен с первым входом третьего 25 вычитающего устройства, второй вход которого соединен с выходом второго 27 делителя, выход третьего 25 вычитающего устройства соединен с первым входом третьего 28 делителя, выход первого 26 и третьего 28 делителей является соответственно первым и вторым выходом блока 12 определения параметров движения объекта.
Заявляемая радиолокационная станция может быть выполнена с использованием следующих функциональных элементов.
В качестве задающего генератора 10 может быть использован генератор с самовозбуждением и кварцевой стабилизацией. В качестве делителей 11 частоты могут использоваться блокинг-генераторы, работающие в режиме деления (Радиолокационные устройства (теория и принципы построения). Под ред. В.В.Григорина-Рябова, стр.602-603).
Передатчик 2 - импульсного типа (Справочник по основам радиолокационной техники. М., 1967, с.278). Антенный переключатель 3 выполнен на циркуляторе или волноводном мосте (Справочник по основам радиолокационной техники. М., 1967, стр.146-147). Приемник 4 - супергетеродинного типа (Справочник по основам радиолокационной техники. М., 1967, стр.343-344).
Запоминающее устройство 5 - Интегральные микросхемы. Справочник под ред. Т.В.Тарабрина, М., Радио и связь, 1984.
Счетно-решающее устройство 6 - цифровой вычислитель, осуществляющий вычисления по формуле:
 где Δi≠Δj
где Δi≠Δj
где θ0 - измеряемая угловая координата объекта; θi, θj - угловые координаты луча при i-м и j-м (i≠j) его положениях соответственно; Ui, Uj - амплитуды принятого сигнала при i-м и j-м положениях луча соответственно.
Антенна 7 - фазированная антенная решетка с электронным сканированием по одной или обеим угловым координатам и с круговым механическим вращением (Справочник по радиолокации. Под ред. М.Сколника. М., Сов. радио, 1977, т.2, стр.132-13 8).
Устройство определения ширины луча 9 - цифровой вычислитель, осуществляющий вычисления в соответствии с формулой Δk=Δkэ+Δkп, где Δkэ - ширина луча при отклонении от нормали на угол θkэ - определяется в соответствии с формулой: Δkэ=Δн/cosθkэ, где Δн - ширина луча при его положении на нормали, Δkп - программное приращение ширины луча.
Радиолокационная станция работает следующим образом.
По команде устройства управления 1 устройство управления лучом 8 выдает сигналы в антенну 7, по которым полотно ФАР и фазовращатели ФАР устанавливаются таким образом, чтобы обеспечить излучение зондирующего сигнала в требуемом (k-м, k=1, 2,...i, j,...) направлении зоны обзора РЛС. Сигнал, пропорциональный угловой координате луча θk, со второго выхода устройства управления лучом 8 подается в запоминающее устройство 5 и хранится там. Этот же сигнал и сигнал, пропорциональный соответствующей угловой координате нормали антенны θkн, с третьего выхода устройства управления лучом 8 поступают на первый и второй входы устройства определения ширины луча 9 соответственно, где производится определение отклонения луча от нормали антенны θkэ и с учетом программных изменений ширины луча Δkп - определение ширины луча антенны Δк (в соответствии с Δk=Δkэ+Δkп). Сигнал с выхода устройства 9, пропорциональный значению ширины луча Δk, подается на третий вход запоминающего устройства 5 и хранится там. В передатчике 2 формируется зондирующий сигнал, который через антенный переключатель 3 поступает в антенну 7 и излучается. Отраженный от объекта сигнал принимается антенной 7 и через антенный переключатель 3 поступает в приемник 4 и далее - в запоминающее устройство 5, где его амплитуда Uk запоминается. По команде устройства управления 1 выбирается следующее направление зоны обзора для излучения зондирующего сигнала и операции повторяются. Таким образом, в процессе осмотра зоны обзора в запоминающем устройстве 5 записываются амплитуды отраженных сигналов и соответствующие им угловые положения луча и величины ширины луча. В счетно-решающем устройстве 6 из всех направлений луча выбираются два соседних направления (θi, θj) с наибольшими амплитудами отраженных сигналов и в соответствии с формулой:  вычисляется угловая координата объекта.
вычисляется угловая координата объекта.
На основе анализа динамики изменения текущих угловых координат объекта относительно заданных значений определяется угловая скорость перемещения объекта, а на основе анализа динамики изменения угловой скорости объекта определяется угловое ускорение объекта.
Это осуществляется следующим образом.
При сближении измерителя, на котором размещена радиолокационная станция с объектом, с выхода счетно-решающего устройства 6, радиолокационной станции поступают сигналы, соответствующие текущим значениям угловых координат объекта на вход блока 12 определения параметров движения объекта и соответственно на первые входы первого 13, второго 14 и третьего 15 пороговых устройств, на вторые входы которых поступают сигналы с группы выходов задатчика 29 сигналов.
В случае превышения первого заданного уровня, сигнал с выхода первого 13 порогового устройства поступает одновременно на первые входы первого 23 вычитающего устройства и первого 16 элемента И, на второй и третий входы которого поступают сигналы соответственно с выхода генератора 18 импульсов и с выхода первого 19 элемента И-НЕ.
С элемента И сигнал через счетчик 21 поступает на второй вход первого делителя 26.
В случае превышения второго заданного уровня, сигнал с выхода второго 14 порогового устройства поступает на первый вход второго 24 и второй вход первого 23 вычитающих устройств, вход первого 19 элемента И-НЕ и первый вход второго 17 элемента И.
При этом первый 16 элемент И прекращает подсчет импульсов от генератора 18 сигналов за счет снятия сигнала выхода элемента первого 19 элемента И-НЕ.
С выхода первого вычитающего устройства сигнал поступает на первый вход делителя 26. На выходе делителя формируется сигнал, равный угловой скорости перемещения объекта в виде выражения: 
где θ01 и θ02 - текущие угловые координаты объекта, полученные при превышении заданных пороговых уровней соответственно с выхода первого и второго пороговых устройств, Δt1 - временной интервал между моментами времени срабатывания первого и второго пороговых устройств.
Таким образом, на основе измерения временного интервала между двумя текущими значениями угловых координат объекта на выходе первого 26 делителя сформирован сигнал, равный угловой скорости перемещения объекта, который поступает на первый вход третьего 25 вычитающего устройства. От генератора 18 импульсов сигналы через второй 17 элемент И, второй 22 счетчик поступает на второй вход второго 27 делителя.
В случае превышения третьего заданного уровня, сигнал с выхода третьего 15 порогового устройства поступает на вход второго 20 элемента И-НЕ, тем самым прекращая подсчет импульсов вторым 22 счетчиком с генератора 18 импульсов, за счет снятия сигнала с третьего входа второго 17 элемента И, кроме того, сигнал поступает на второй вход второго 24 вычитающего устройства, с выхода которого сигнал поступает на первый вход второго 27 делителя, на выходе которого формируется сигнал, равный угловой скорости движения объекта в виде выражения  где θ02 и θ03 - текущие угловые координаты объекта, полученные при превышении заданных пороговых уровней соответственно с выхода второго и третьего пороговых устройств, Δt2 - временной интервал между моментами времени срабатывания второго и третьего пороговых устройств.
где θ02 и θ03 - текущие угловые координаты объекта, полученные при превышении заданных пороговых уровней соответственно с выхода второго и третьего пороговых устройств, Δt2 - временной интервал между моментами времени срабатывания второго и третьего пороговых устройств.
Данный сигнал поступает на второй вход третьего 25 вычитающего устройства, с выхода которого поступает на первый вход третьего 28 делителя, на второй вход которого поступает с выхода второго 22 счетчика, с выхода делителя 28 снимается сигнал, равный угловому ускорению движения объекта в виде выражения  которое получено на основе анализа динамики изменения угловой скорости объекта.
которое получено на основе анализа динамики изменения угловой скорости объекта.
Таким образом, заявляемые способ и устройство позволяют расширить функциональные возможности за счет измерения не только угловой координаты, но также угловой скорости и ускорения перемещения объекта.
Источники информации
1. Патент на изобретение РФ №2274874, Кл. G01S 19/00, 26.08.2004 года (прототип).
2. Радиолокационные устройства (теория и принципы построения). Под ред. В.В.Григорина-Рябова, с.602-603.
3. Справочник по основам радиолокационной техники, М., 1967, с.278.
4. Справочник по основам радиолокационной техники, М., 1967, стр.146-147.
5. Справочник по основам радиолокационной техники, М., 1967, стр.343-344.
6. Интегральные микросхемы. Справочник под ред. Т.В.Тарабрина, М., Радио и связь, 1984.
7. Справочник по радиолокации. Под ред. М.Сколника. М., Сов. радио, 1977, т.2, с.132-138.


Изобретение относится к области радиолокации и может быть использовано для измерения угловых координат объектов и для определения угловой скорости и ускорения перемещения объектов в радиолокационных станциях (РЛС) с фазированной антенной решеткой (ФАР). Сущность изобретения заключается в излучении зондирующих сигналов, приеме отраженных сигналов не менее чем при двух положениях луча антенны, разнесенных по угловой координате, измерении амплитуд принятых сигналов, соответствующих этим положениям луча, определении ширины луча на основе измерения отклонения луча от нормали антенны при каждом его угловом положении, вычислении угловой координаты объекта, определении угловой скорости движения объекта, на основе фиксации временного интервала, характеризующего динамику изменения текущих угловых положений объекта относительно заданных значений, определении углового ускорения движения объекта на основе фиксации временного интервала, характеризующего динамику изменения текущих значений угловой скорости движения объекта относительно заданных значений. Достигаемым техническим результатом является повышение функциональных возможностей радиолокационной станции. 2 н.п. ф-лы, 4 ил.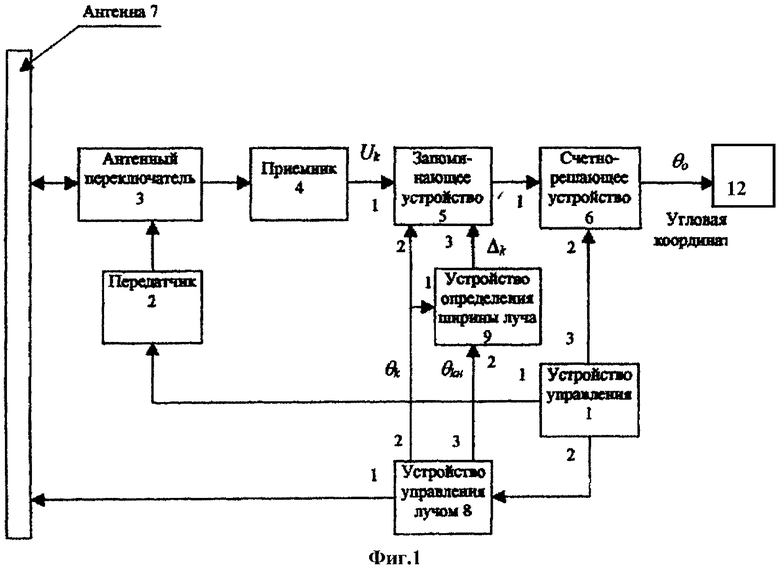
Δi=Δн/cos(θiэ)+Δin, Δj=Δн/cos(θjэ)+Δjn,
где Δ- ширина луча антенны по уровню половинной мощности относительно максимума луча, Δi, Δj - ширина луча при i-м и j-м (i≠j) его положениях соответственно, θiэ, θjэ - измеренное отклонение луча от нормали антенны при электронном сканировании при i-м и j-м его положениях соответственно, Δiп, Δjn - программное изменение ширины луча при i-м и j-м его положениях соответственно, Δн - ширина луча при его положении на нормали антенны, после чего вычисляют угловую координату объекта в соответствии с формулами:
 при Δi≠Δj;
при Δi≠Δj;
где θ0 - измеряемая угловая координата объекта, в, θiθj - угловые координаты луча при i-м и j-м (i≠j) его положениях соответственно, Ui, Uj - амплитуды принятого сигнала при i-м и j-м положениях луча соответственно, отличающийся тем, что определяют угловые скорости движения объекта на основе фиксации временных интервалов, характеризующих динамику изменения текущих угловых координат объекта относительно заданных значений, определяют угловое ускорение движения объекта на основе фиксации временного интервала, характеризующего динамику изменения текущих значений угловой скорости движения объекта.
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ КООРДИНАТЫ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2274874C1 |
| RU 2004117733 A, 20.11.2005 | |||
| СПОСОБ ФОРМИРОВАНИЯ И УСТРОЙСТВО МАЛОГАБАРИТНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ РЛС С УПРАВЛЯЕМОЙ ПО ШИРИНЕ ДИАГРАММОЙ НАПРАВЛЕННОСТИ | 2000 |
|
RU2183891C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ В СИСТЕМАХ СО СВЕРХСКАНИРОВАНИЕМ | 1994 |
|
RU2093855C1 |
| US 5166689 А, 24.11.1992 | |||
| Устройство для измерения геометрии зеркального отражателя | 1987 |
|
SU1500952A1 |
| Роторный подборщик плодов бахчевых культур с дисковым ножом | 2017 |
|
RU2643725C1 |

