Изобретение относится к области обеспечения безопасности дорожного движения, а именно к системам расположения и отображения технических средств организации дорожного движения транспортных средств.
Обеспечение безопасности движения транспортных средств на автомобильных дорогах в подавляющем большинстве случаев достигается применением технических средств организации дорожного движения (ТСОДД). К ним относятся дорожных знаки (ГОСТР 52290), дорожные светофоры (ГОСТ Р 52282), дорожная разметка (ГОСТ Р 51256), а также дорожные ограждения (ГОСТ Р 52606) и направляющие устройства (сигнальные столбики, тумбы, направляющие островки, островки безопасности, предназначенные для зрительного ориентирования). Правила применения ТСОДД изложены в ГОСТ Р 52289.
В указанных документах расположение ТСОДД определяется расстоянием до этих средств и пространством, в пределах которого они отчетливо (распознаваемо) видны водителю ТС (полем видимости).
Априорно, видимость ТСОДД не должны перекрывать объекты другого назначения, создающие оптические помех и при получении визуальной информации ТСОДД водителем.
Границы поля видимости технических средств организации дорожного движения в открытом пространстве определяются:
- психофизиологическими возможностями водителя транспортного средства;
- техническими возможностями транспортного средства.
В заявке рассматриваются технические средства организации дорожного движения, установленные сбоку от проезжей части.
Основными ограничителями психофизиологических возможностей водителя являются особенности зрения человека и время его реакций при получении и обработке информации, сообщаемой дорожными знаками, светофорами и т.п.
В неподвижном состоянии глаз человека видит ограниченное пространство.
Такое пространство, все точки которого одновременно видны, называется полем зрения.
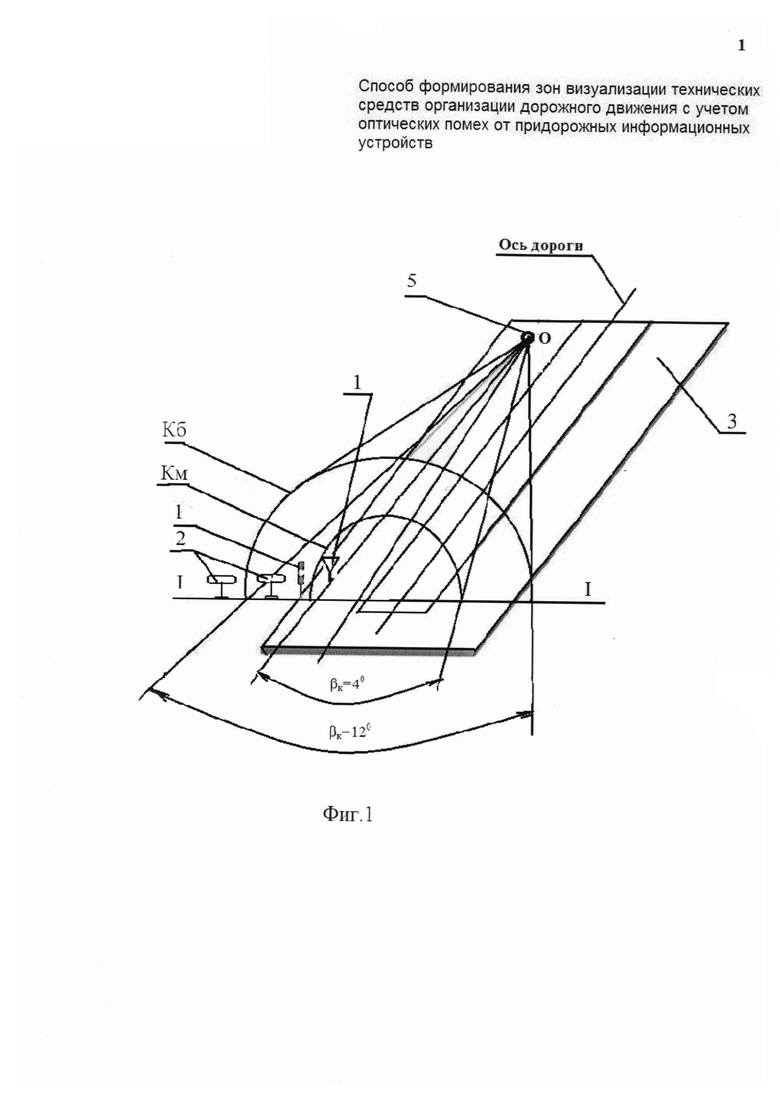
Величина поля зрения (фиг. 1) зависит от индивидуальных особенностей людей, цвета предметов, фона и скорости движения.
Поле видимости технических средств организации дорожного движения должно быть меньше или равно углу поля нормального зрения водителя.
Поле нормального зрения человеческих глаз равно углу зрительного конуса в 120-130°.
С увеличением скорости движения этот угол уменьшается из-за сосредоточения внимания: при скорости 40 км/ч до 100°, при 70 км/ч до 40°. Это ослабление периферийного зрения компенсируется усилением внимания водителем.
Наиболее отчетливо и точно скорость движения ТС воспринимается центральной частью поля зрения глаза, а без отчетливого различения объектов - полем периферийного зрения.
Известно, что самое острое зрение - центральное, в зрительном конусе с углом 3-4°, хорошая острота зрения - в конусе до 6°, удовлетворительная - до 12°.
В зоне угла зрительного конуса до 12° узнаются предметы, различается их форма, определяется величина, расстояние и скорость их движения.
Предметы, расположенные за пределами угла в 12°, не очень отчетливы, за пределами 90° - неотчетливы и бесцветны.
Ограниченность поля удовлетворительного зрения вынуждает водителя при подъездам к перекресткам, переходам, остановкам маршрутного транспорта и т.п. переводить свой взгляд в зоны периферийного зрения, где может создаться опасная обстановка.
Исходя из принятых ограничений по углу зрительного конуса при определении границ поля видимости в горизонтальной плоскости дорожные знаки (светофоры) необходимо размещать в пределах проекции на плоскость движения ТС зрительного конуса водителя с вершинным углом βк=4°.
При определении границ поля видимости должна соблюдаться следующая зависимость:
минимальное расстояние до дорожного знака (светофора), предписывающего или предполагающего торможение до полной остановки и находящегося в поле видимости водителя  должно быть не менее расстояния безопасного торможения Sбез автомобиля, т.е. позволять водителю: «увидеть - среагировать - затормозить». Расстояние безопасного торможения Sбез найдем из следующего уравнения:
должно быть не менее расстояния безопасного торможения Sбез автомобиля, т.е. позволять водителю: «увидеть - среагировать - затормозить». Расстояние безопасного торможения Sбез найдем из следующего уравнения:
Sбез=Sр+Sср+Sт,
где Sр - расстояние, пройденное ТС за время реакции водителя (tp), м;
Sср - расстояние, пройденное ТС за время срабатывания тормозной системы tcp, м;
Sт - тормозной путь ТС при установившемся замедлении, м.
Задача заявленного технического решения: сформирование границ поля видимости, за пределами которых размещение придорожных информационных устройств, например наружной рекламы, безопасно.
Из сведений, общедоступных до даты приоритета заявленного технического решения, известно средство того же назначения - способ формирования зон визуализации технических средств организации дорожного движения с учетом оптических помех от придорожных информационных устройств, заключающийся в том, что на участке автомобильной дороги и придорожной полосы определяют границы зон визуализации технических средств организации дорожного движения (ТСОДД), которые расположены справа по ходу движения и требуют остановки транспортного средства (ТС) (книга Коноплянко В.И. «Организация и безопасность дорожного движения». Издательство: "Высшая школа" (2007), Глава 2. Психофизиологические основы вождения автомобиля).
Данное техническое решение является наиболее близким к изобретению по технической сущности и достигаемому результату, поэтому принято за прототип.
Недостатками прототипа является ограниченный уровень безопасности движения ТС из-за отсутствия учета влияния на увеличение тормозного пути оптических помех от придорожных информационных устройств.
Технический результат от использования заявленного технического решения заключается в повышении безопасности движения ТС путем своевременной визуализации ТСОДД с учетом оптических помех от придорожных информационных устройств.
Ниже раскрыты все общие и частные существенные признаки изобретения, характеризующие их причинно-следственную связь с указанным техническим результатом, достаточные для осуществления специалистом в данной области техники.
Способ формирования зон визуализации ТСОДД с учетом оптических помех от придорожных информационных устройств заключается в том, что на участке автомобильной дороги и придорожной полосы определяют границы зон визуализации ТСОДД, которые расположены справа по ходу движения транспортных средств. На правой стороне дороги формируют три зоны визуализции ТСОДД, охватываемые конусами зрения водителя: Км - меньшего размера и Кб - большего размера, причем у меньшего конуса Км проекция на горизонтальную плоскость имеет вершинный угол βк=4°, а у большего конуса Кб проекция на горизонтальную плоскость имеет вершинный угол βк=12°. Первую из зон визуализации, в которой размешают ТСОДД, формируют в пространстве меньшего конуса зрения водителя, при этом проекция указанного конуса на горизонтальную плоскость имеет вершинный угол βк=4°, а проекция оси конуса на горизонтальную плоскость до пересечения с проекцией линии установки ТСОДД имеет длину, равную расстоянию безопасного торможения Sбез=Sp+Sср+Sт, где Sp - расстояние, пройденное ТС за время реакции водителя; Scp - расстояние, пройденное ТС за время срабатывания тормозной системы; Sт - тормозной путь ТС при установившемся замедлении; вторую зону визуализации формируют в виде пространства между поверхностями указанных меньшего и большего конусов зрения водителя ТС, при этом во второй зоне размещают ТСОДД и информационные устройства, которые создают оптические помехи водителю, но не перекрывают видимость ТСОДД с расстояния безопасного торможения Sбез, величину которого устанавливают по зависимости:  , где Sдопинф - дополнительное расстояние, которое проходит ТС за время отвлечения водителя на распознавание оптических информационных помех, и определяется по зависимости:
, где Sдопинф - дополнительное расстояние, которое проходит ТС за время отвлечения водителя на распознавание оптических информационных помех, и определяется по зависимости:
где Vo - скорость движения ТС, м/с;
Ti - математическое ожидание распределения времени распознавания информации с i-го устройства, с;
n - количество одновременно видимых информационных устройств в конусе зрения водителя при βк≤12° на расстоянии Sбез=Sр+Scp+Sт,
и третью зону визуализации ТСОДД, в которой размещают информационные устройства, формируют вне большего конуса зрения водителя, при этом проекция указанного конуса на горизонтальную плоскость имеет вершинный угол βк=12°, а проекция оси конуса на горизонтальную плоскость до пересечения с проекцией линии установки ТСОДД на горизонтальную плоскость имеет длину, равную расстоянию безопасного торможения Sбез=Sp+Scp+Sт.
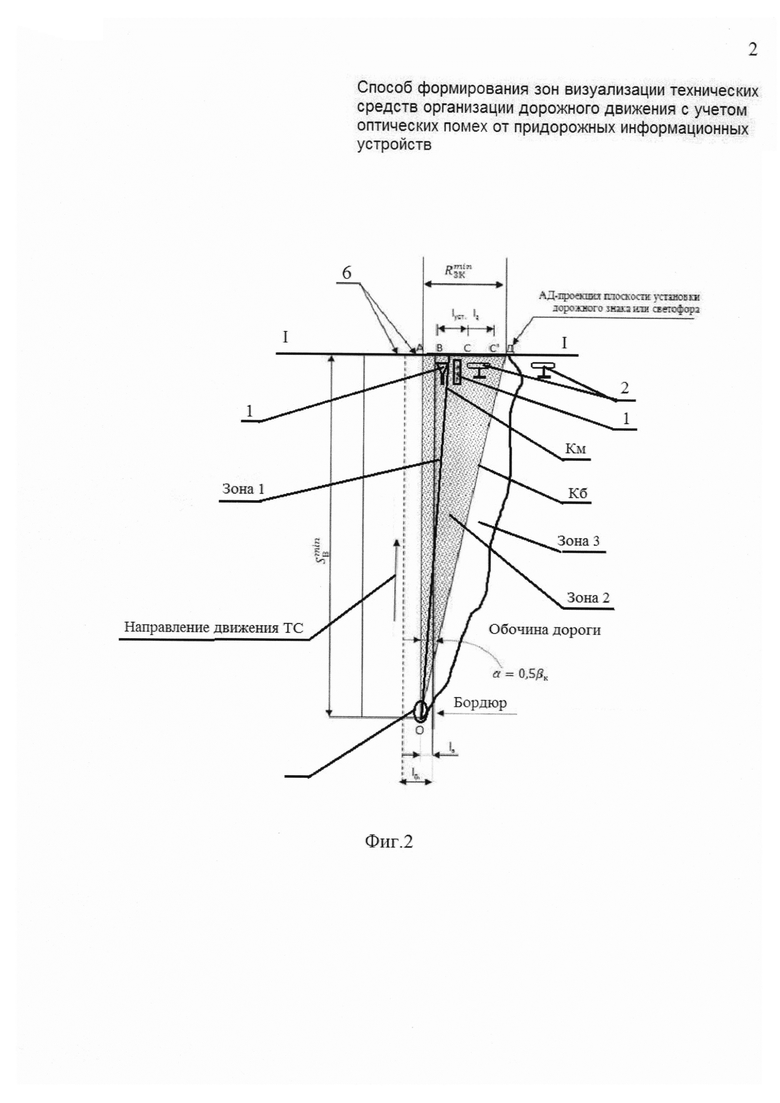
Техническое решение иллюстрируется чертежами, где: на фиг. 1 представлена схема формирования зон визуализации, изометрия; на фиг. 2 представлена проекция конусов зрения на горизонтальную плоскость.
Способ формирования зон визуализации ТСОДД 1 с учетом оптических помех от придорожных информационных устройств 2 заключается в том, что на участке автомобильной дороги 3 и придорожной полосы 4 определяют границы зон визуализации ТСОДД 1, которые расположены справа по ходу движения и требуют остановки транспортного средства (ТС) 1.
На правой стороне дороги формируют три зоны визуализции ТСОДД, охватываемые конусами зрения водителя: Км - меньшего размера и Кб - большего размера, причем у меньшего конуса Км проекция на горизонтальную плоскость имеет вершинный угол βк=4°, а у большего конуса Кб проекция на горизонтальную плоскость имеет вершинный угол βк=12°.
Первую из зон визуализации, в которой размещают ТСОДД 1, формируют в пространстве меньшего Км конуса зрения водителя.
Проекция указанного конуса на горизонтальную плоскость имеет вершинный угол βк=4°, а проекция оси конуса на горизонтальную плоскость до пересечения с проекцией линии установки ТСОДД 1 имеет длину, равную расстоянию безопасного торможения Sбез=Sp+Sср+Sт, где Sp - расстояние, пройденное ТС 5 за время реакции водителя; Scp - расстояние, пройденное ТС 5 за время срабатывания тормозной системы; Sт - тормозной путь ТС 5 при установившемся замедлении.
Вторую зону визуализации формируют в виде пространства между поверхностями указанных меньшего Км и большего Кб конусов зрения водителя ТС 5.
Во второй зоне размешают ТСОДД 1 и информационные устройства 2, которые создают оптические помехи водителю, но не перекрывают видимость ТСОДД 1 с расстояния безопасного торможения Sбeз, величину которого устанавливают по зависимости:  , а
, а  - дополнительное расстояние, которое проходит ТС 5 за время отвлечения водителя на распознавание оптических информационных помех, и определяется по зависимости:
- дополнительное расстояние, которое проходит ТС 5 за время отвлечения водителя на распознавание оптических информационных помех, и определяется по зависимости:
 ,
,
где Vo - скорость движения ТС, м/с;
Ti - математическое ожидание распределения времени распознавания информации с i-го информационного устройства, с;
n - количество одновременно видимых информационных устройств в конусе зрения водителя при βк≤12° на расстоянии Sбез=Sp+Scp+Sт.
В третьей зоне визуализации ТСОДД 1 размещают информационные устройства 2 и ее формируют вне большего конуса Кб зрения водителя.
Сравнение заявленного технического решения с уровнем техники, известным из научно-технической и патентной документации на дату приоритета в основной и смежной рубриках, не выявило средство, которому присущи признаки, идентичные всем признакам, содержащимся в предложенной заявителем формуле изобретения, включая характеристику назначения. Т.е., совокупность существенных признаков заявленного решения ранее не была известна и не тождественна каким-либо известным техническим решениям, следовательно, оно соответствует условию патентоспособности "новизна".
Данное техническое решение промышленно применимо, поскольку в описании к заявке и названии изобретения указано его назначение, оно может быть осуществлено промышленным способом для повышения безопасности движения на дорогах, осуществимо и воспроизводимо, а отличительные признаки, приведенные в формуле изобретения устройства, позволяют получить заданный технический результат, т.е. являются существенными.
Изобретение в том виде, как оно охарактеризовано в каждом из пунктов формулы, может быть осуществлено с помощью средств и методов, описанных в прототипе, а также в опубликованной 30.12.2003 (Бюл. №2) заявке РФ №2003138097/11, МПК G08G 1/09 (2006.01), ставшими общедоступным до даты приоритета изобретения.
Следовательно, заявленное техническое решение соответствует условию патентоспособности "промышленная применимость".
Анализ известных технических решений в данной области техники показал, что предложенное техническое решение не следует для специалиста явным образом из уровня техники, поскольку не выявлены решения, имеющие признаки, совпадающие с его отличительными признаками, а в выявленных таких решениях не подтверждена известность влияния отличительных признаков на указанный в материалах заявки технический результат.
Т.е. заявленное решение имеет признаки, которые отсутствуют в известных технических решениях, а использование этих признаков в заявленной совокупности существенных признаков дает возможность получить новый технический результат - повышение безопасности движения ТС 5 путем своевременной визуализации ТСОДД 1 с учетом оптических помех от придорожных информационных устройств.
Следовательно, предложенное техническое решение может быть получено только путем творческого подхода и неочевидно для среднего специалиста в этой области, т.е. имеет изобретательский уровень по сравнению с существующим уровнем техники.
Осуществление заявленного изобретения достигается реализацией указанного назначения.
Для подтверждения возможности осуществления изобретения ниже приводятся следующие сведения, раскрывающие, как может быть осуществлено изобретение с реализацией указанного заявителем назначения и с подтверждением возможности достижения технического результата при осуществлении изобретения.
Для обеспечения своевременного распознавания водителем ТС 5 ТСОДД 1 (на примере дорожных знаков) на дорогах с различным количеством полос движения 6, требующих или предполагающих остановку ТС 5, последние располагают в пределах зрительного конуса водителя (Фиг. 1), обеспечивающего уверенное распознавание информации с расстояния, необходимого для остановки ТС 5. Основание зрительного конуса является окружностью, расположенной в плоскости, перпендикулярной оси конуса (линии взгляда водителя).
Максимальный вершинный угол горизонтальной проекции конуса удовлетворительного зрения  .
.
Дорожный знак, перед которым необходима или возможна остановка транспортного средства 5 (например, светофор), должен располагаться так, чтобы его проекция на горизонтальную плоскость совпадала с линией Д'Д (проекцией основания конуса наивысшей остроты зрения), а при установке сбоку от проезжей части - с катетом АД треугольника видимости ОАД, являющимся частью проекции конуса наивысшей остроты зрения водителя ТС 5 на горизонтальную плоскость (Фиг. 2).
При этом величина этого катета должна быть не более минимального радиуса зрительного конуса  .
.
Предельный угол наивысшей остроты зрения βк=4°.
Минимальный радиус основания зрительного конуса  , при котором дорожный знак (светофор) находится в пределах основания конуса и отчетливо распознается водителем
, при котором дорожный знак (светофор) находится в пределах основания конуса и отчетливо распознается водителем  , возможно определить следующим образом:
, возможно определить следующим образом:
 ,
,
где hуст - высота дорожного знака (светофора) от нижнего края информационного поля до места установки, м;
hосн - высота основания (тротуара) установки дорожного знака (светофора) над проезжей частью, м;
hз - высота информационного поля дорожного знака (светофора), м;
hв - высота уровня глаз водителя над проезжей частью, м;
Iв -  ширины полосы движения Iп, м;
ширины полосы движения Iп, м;
Iуст - расстояние установки дорожного знака (светофора) от края проезжей части, м;
Iз - ширина информационного поля дорожного знака (светофора), м.
Величина катета OA треугольника ОАД должна быть не менее расстояния безопасного торможения транспортного средства, определяемого по формуле:
 ,
,
где минимальное расстояние до дорожного знака (светофора), предписывающего или предполагающего торможение и находящегося в поле видимости водителя,  должно быть не менее расстояния безопасного торможения Sбез автомобиля, т.е. позволять водителю: «увидеть - среагировать - затормозить»;
должно быть не менее расстояния безопасного торможения Sбез автомобиля, т.е. позволять водителю: «увидеть - среагировать - затормозить»;
Sp - расстояние, пройденное ТС за время реакции водителя (tp), м;
Scp - расстояние, пройденное ТС за время срабатывания тормозной системы (tср), м;
Sт - тормозной путь ТС 5 при установившемся замедлении, м;
Время срабатывания тормозной системы определяется по формуле:
tcp=tз+tнз, с,
где tз - время запаздывания тормозной системы (отрезок времени с момента нажатия на педаль тормозного привода до момента взаимного контакта рабочих поверхностей тормозных механизмов), с;
tнз - время нарастания замедления (отрезок времени с момента взаимного контакта рабочих поверхностей тормозных механизмов до момента начала периода установившегося замедления (tуст) транспортного средства, с.
В пределах конуса зрения водителя ТС 5 могут располагаться другие источники оптических помех от придорожных информационных устройств 2, например информационные устройства, не относящиеся к средствам регулирования дорожного движения, например рекламные конструкции.
При этом условия их размещения регламентируются.
Исходя из принятых ограничений по углу зрительного конуса при определении границ поля видимости в горизонтальной плоскости дорожные знаки (светофоры) необходимо размещать в пределах угла проекции на плоскость движения ТС 5 зрительного конуса с вершинным углом βк=4°.
Исходя из вышеизложенного, границы поля удовлетворительной видимости водителя ТС, двигающегося из точки О в точку А, определяются треугольником видимости ОАД по условиям психофизиологических возможностей водителя и технических возможностей ТС, где Rзк - ширины поля зрения в пределах конуса удовлетворительного зрения (βк=12°).
При определении границ поля видимости должны соблюдаться следующая зависимость:
минимальное расстояние до дорожного знака (светофора), предписывающего или предполагающего торможение и находящегося в поле видимости водителя, должно быть не менее расстояния безопасного торможения Sбез TC 5, т.е. позволять водителю: «увидеть - среагировать - затормозить». Расстояние безопасного торможения Sбез найдем из следующего уравнения:
Sбез=Sр+Scp+Sт,
где Sp - расстояние, пройденное ТС 5 за время реакции водителя (tp), м;
Scp - расстояние, пройденное ТС 5 за время срабатывания тормозной системы (tcp), м;
Sт - тормозной путь ТС 5 при установившемся замедлении, м.
Время срабатывания тормозной системы определяется по формуле:
tcр=tз+tнз, с,
где tз - время запаздывания тормозной системы (отрезок времени с момента нажатия на педаль тормозного привода до момента взаимного контакта рабочих поверхностей тормозных механизмов), с;
tнз - время нарастания замедления (отрезок времени с момента взаимного контакта рабочих поверхностей тормозных механизмов до момента начала периода установившегося замедления (tуст) транспортного средства, с.
При этом  .
.
С учетом вышеизложенного, в общем случае уравнение для определения расстояния безопасности выглядит следующим образом:

где Vо - скорость ТС 5 на момент начала периода обнаружения ТСОДД 1 и распознавания информации водителем, км/ч;
jуст - величина установившегося замедления ТС, м/с2;
 ,
,
где ϕ - коэффициент продольного сцепления шин с дорогой;
Кэ - коэффициент эффективности торможения;
g - ускорение свободного падения (9,81 м/с2);
tуст - время движения ТС 5 с установившимся (постоянным) замедлением jуст, с;
γ - угол уклона дороги, град (+ при подъеме, - при спуске), град.
Используя эти данные, получим:
 .
.
Использование изобретения позволяет повысить безопасность движения ТС 5 путем своевременной визуализации ТСОДД 1 с учетом оптических помех от придорожных информационных устройств 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ДОРОЖНОГО ДВИЖЕНИЯ ПУТЕМ ВИЗУАЛИЗАЦИИ ДОРОЖНЫХ ЗНАКОВ В САЛОНЕ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2268499C2 |
| Способ управления работой системы активной безопасности транспортных средств | 2018 |
|
RU2704357C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСПРАВНОСТИ РАБОЧЕЙ ТОРМОЗНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА И ВОССТАНОВЛЕНИЯ МЕХАНИЗМА ДОРОЖНО-ТРАНСПОРТНОГО ПРОИСШЕСТВИЯ И УСТРОЙСТВО "ЧЕРНЫЙ ЯЩИК" ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2519188C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ | 2022 |
|
RU2793009C1 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ДОРОЖНОГО ДВИЖЕНИЯ | 2013 |
|
RU2574293C2 |
| АВТОНОМНЫЙ КОМПЛЕКС ОБУСТРОЙСТВА ПЕШЕХОДНОГО ПЕРЕХОДА С ТЕЛЕМЕТРИЕЙ НА ОСНОВЕ GSM/GPRS МОДУЛЯ | 2013 |
|
RU2541591C1 |
| СПОСОБ ВИЗУАЛЬНОГО ПРЕДСТАВЛЕНИЯ ИНФОРМАЦИИ ВОДИТЕЛЮ БЕЗРЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2458351C1 |
| Бортовая информационная система | 2020 |
|
RU2742960C1 |
| Способ помощи водителю наземного транспортного средства при обгоне | 2023 |
|
RU2831037C1 |
Изобретение относится к области обеспечения безопасности дорожного движения. Способ формирования зон визуализации технических средств организации дорожного движения с учетом оптических помех от придорожных информационных устройств заключается в том, что на участке автомобильной дороги и придорожной полосы определяют границы зон визуализации технических средств организации дорожного движения (ТСОДД), которые расположены справа по ходу движения и требуют остановки транспортного средства (ТС). На правой стороне дороги формируют три зоны визуализации ТСОДД, охватываемые конусами зрения водителя. Первую из зон визуализации, в которой размещают ТСОДД, формируют в пространстве меньшего конуса зрения водителя. Вторую зону визуализации формируют в виде пространства между поверхностями меньшего и большего конусов зрения водителя, при этом во второй зоне размещают ТСОДД и информационные устройства, которые создают оптические помехи водителю, но не перекрывают видимость ТСОДД. Третью зону визуализации ТСОДД, в которой размещают информационные устройства, формируют вне большего конуса зрения водителя. Достигается повышение безопасности дорожного движения. 2 ил.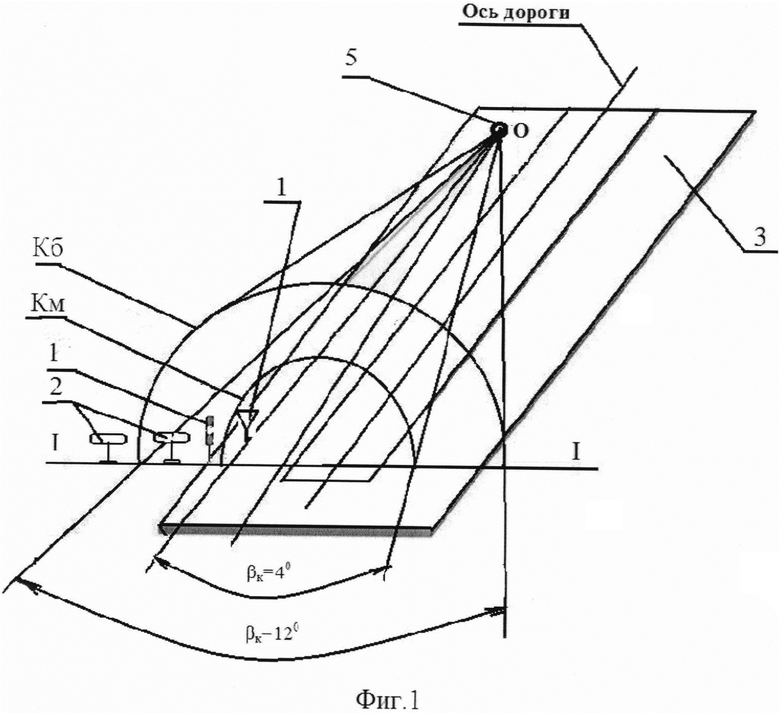
Способ формирования зон визуализации технических средств организации дорожного движения с учетом оптических помех от придорожных информационных устройств, заключающийся в том, что на участке автомобильной дороги и придорожной полосы определяют границы зон визуализации технических средств организации дорожного движения (ТСОДД), которые расположены справа по ходу движения и требуют остановки транспортного средства (ТС), отличающийся тем, что на правой стороне дороги сформируют три зоны визуализации ТСОДД, охватываемые конусами зрения водителя: Км - меньшего размера и Кб - большего размера, причем у меньшего конуса Км проекция на горизонтальную плоскость имеет вершинный угол βк=4°, а у большего конуса Кб проекция на горизонтальную плоскость имеет вершинный угол βк=12°: первую из зон визуализации, в которой размещают ТСОДД, формируют в пространстве меньшего конуса зрения водителя, при этом проекция указанного конуса на горизонтальную плоскость имеет вершинный угол βк=4°, а проекция оси конуса на горизонтальную плоскость до пересечения с проекцией линии установки ТСОДД имеет длину, равную расстоянию безопасного торможения Sбез=Sp+Scp+Sт, где Sp - расстояние, пройденное ТС за время реакции водителя; Scp - расстояние, пройденное ТС за время срабатывания тормозной системы; Sт - тормозной путь ТС при установившемся замедлении; вторую зону визуализации формируют в виде пространства между поверхностями указанных меньшего и большего конусов зрения водителя ТС, при этом во второй зоне размещают ТСОДД и информационные устройства, которые создают оптические помехи водителю, но не перекрывают видимость ТСОДД с расстояния безопасного торможения Sбез, величину которого устанавливают по зависимости:  а
а  - дополнительное расстояние, которое проходит ТС за время отвлечения водителя на распознавание оптических информационных помех, и определяется по зависимости:
- дополнительное расстояние, которое проходит ТС за время отвлечения водителя на распознавание оптических информационных помех, и определяется по зависимости:
где Vo - скорость движения ТС, м/с;
Ti - математическое ожидание распределения времени распознавания информации с i-го носителя, с;
n - количество одновременно видимых носителей информации в конусе зрения водителя при βк≤12° на расстоянии Sбез=Sp+Scp+Sт; и третью зону визуализации ТСОДД, в которой размещают информационные устройства, формируют вне большего конуса зрения водителя, при этом проекция указанного конуса на горизонтальную плоскость имеет вершинный угол βк=12°, а проекция оси конуса на горизонтальную плоскость до пересечения с проекцией линии установки ТСОДД на горизонтальную плоскость имеет длину, равную расстоянию безопасного торможения Sбез=Sp+Scp+Sт.
| JP 2011107740 A, 02.06.2011 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Способ облагораживания древесины для производства карандашей | 1934 |
|
SU41173A1 |

