Изобретение относится к бортовой системе управления космическими аппаратами для автономной (не зависящей от наземного комплекса управления - НКУ) оценки орбиты и ориентации корпуса КА.
Известны способы автономной навигации, применяемые как на пилотируемых, так и беспилотных КА. Первый способ был реализован на пилотируемых станциях "Салют". Он включал в себя измерение моментов восхода (захода) звезд за горизонт планеты при орбитальном движении станции. С целью увеличения точности навигации дополнительно измерялась скорость перемещения относительно наземных радиотехнических маяков и высота полета. Теоретические основы этой системы изложены в статье Ю.Н.Зыбина "Об одном методе автономной навигации искусственных спутников" (журнал "Космические исследования", т.VII, вып.2, 1969 г.). Второй способ применялся на аппаратах 11 Ф624 и заключался в измерении зенитных расстояний двух звезд с помощью двух астровизирующих устройств (АВУ) и радиотехнического построителя местной вертикали. Дополнительно для измерения высоты полета построитель местной вертикали снабжался еще одним приемно-передающим устройством. Этот способ описан в книге "Математическое и программное обеспечение системы автономной навигации КА 11 Ф624", под редакцией Ю.Г.Антонова и С.И.Маркова, МО СССР, 1986 г.
Наиболее близким по технической сущности к заявляемому изобретению следует считать второй способ, который принят за прототип. Общим признаком прототипа и заявляемого способа является наличие на борту двух оптико-электронных устройств. Кроме указанных устройств в известном способе используется радиотехнический построитель вертикали, работа которого ограничивается высотой полета порядка 500 км. Этот построитель необходим потому, что для решения навигационной задачи кроме направления на бесконечно удаленную звезду требуется иметь второе направление, связанное именно с орбитальным движением КА.
Алгоритм работы АВУ построен на совмещении оптической оси визира с изображением заданной НКУ звезды. Для этого АВУ помещается в карданов подвес.
Недостатком известного способа является вынужденный разнос по корпусу КА мест расположения карданова подвеса и крепления построителя вертикали, что снижает точность измерения зенитного расстояния звезды из-за температурных деформаций корпуса КА. Для поддержания точности навигации дополнительно измеряется высота полета над Мировым океаном. Однако количество измерений из-за сдвига следа орбиты по поверхности Земли меняется со временем. Кроме того, количество измерений зависит и от наклона орбиты. Работоспособность радиотехнического высотомера, как отмечалось, ограничивается высотой полета КА. В результате для поддержания требуемой точности определения орбиты необходима периодическая коррекция со стороны НКУ информации автономной системы, то есть такая система фактически автономна лишь частично, что признают и ее разработчики. Кроме того, с помощью построителя местной вертикали грубо (с точностью до нескольких десятков угловых минут) определяют только два угла ориентации корпуса (тангаж и крен) и не определяют угол рыскания. В результате ориентация КА не может быть определена полностью и с достаточно высокой точностью.
Целью данного изобретения является повышение точности навигационных оценок и получение полных оценок ориентации при уменьшении массогабаритных характеристик бортовой системы управления КА, а также расширение среды применения данного способа автономной навигации и ориентации для КА на любых орбитах (до высот геостационара и более и любых наклонений).
Предложенный способ состоит в том, что вместо АВУ используют оптико-электронный прибор (ОЭП), позволяющий не только визировать звезду, но и измерять приборные координаты звезд, попавших в поле зрения прибора, а радиотехнический построитель вертикали заменяют компьютерным расчетом орта радиус-вектора опорной (априори полагаемой) орбиты. Этот орт выступает в качестве линии, связанной с орбитальным движением КА, и позволяет рассчитать зенитное расстояние звезды.
При жестком креплении ОЭП на корпусе КА и отслеживании системой стабилизации КА, хотя бы грубо (в пределах ±5°), направления на центр планеты, возможно решить совместно задачи навигации и ориентации.
В этом случае в координатах рабочей звезды (то есть наиболее яркой из звезд, попавших в поле зрения прибора) содержится информация как о месте нахождения КА в инерциальном пространстве (ибо координаты изменяются по мере движения по орбите), так и информация о фактической ориентации корпуса КА (оси связанной системы координат) относительно осей текущей орбитальной системы координат (ТОСК), принимаемой за базовую. Проблема заключается в том, как использовать эту информацию совместно с данными об опорной орбите, и решить обе задачи: навигации и ориентации.
Для корректного решения обеих задач измеряют координаты и яркость звезд, попавших в поле зрения прибора, и, используя данные об опорной орбите и базу звезд, распознают рабочую звезду, то есть определяют ее положение в геоцентрической экваториальной инерциальной системе координат (ГЭИСК). После этого рассчитывают угол "ось ТОСК-звезда" в текущей системе координат, принимают этот угол за угол в системе ГЭИСК и, при наличии минимум двух таких углов в навигационном сеансе, решают задачу навигации по совокупности навигационных сеансов.
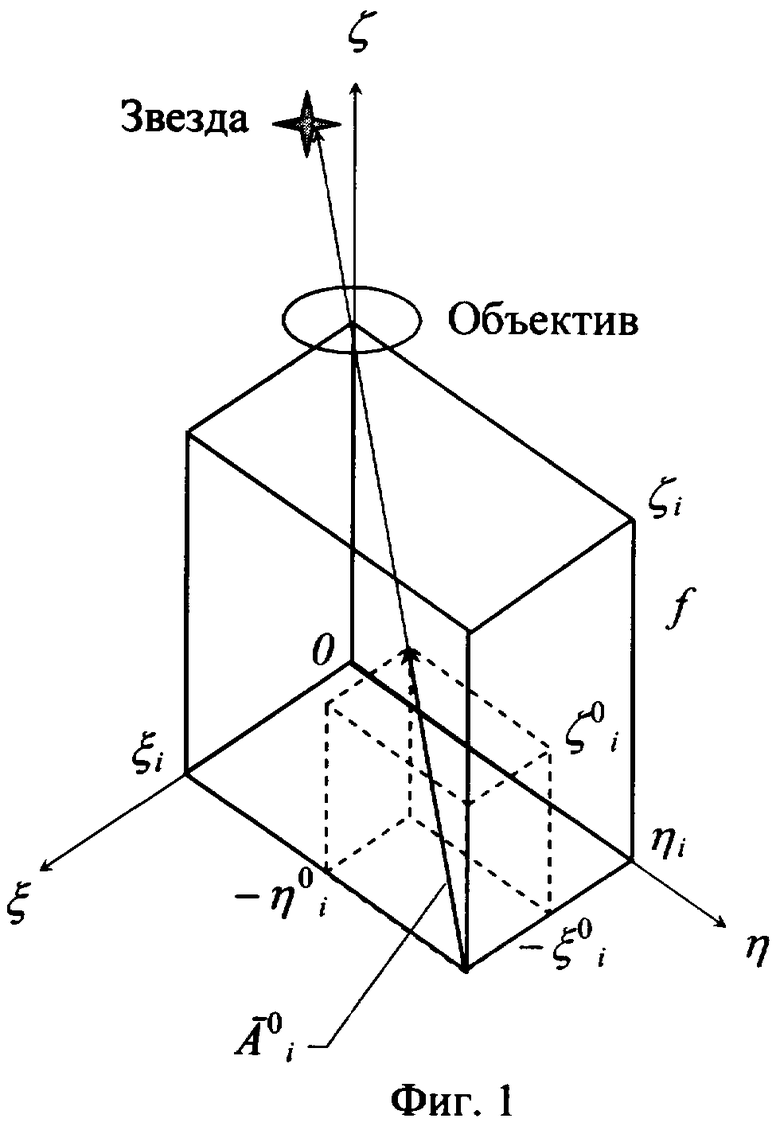
На фиг.1 показана схема измерений в ОЭП. В приборной системе координат ξ, η, ζ из подобия параллелепипедов, построенных на координатах орта звезды (-ξ0, -η0, ζ0) и координатах изображения этой звезды (ξ, η, ζ), определяют, с одной стороны, значение измеренных координат:
и, соответственно, с другой, значения координат орта звезды:

где ξ0, η0, ζ0 - координаты орта звезды,
ξ, η, f - координаты изображения звезды,
 , f - фокусное расстояние.
, f - фокусное расстояние.
При жестком закреплении ОЭП под углами α и β относительно строительных осей КА (Xс вYс вZс в; Хс в - по продольной оси КА; Yсв - по боковой оси) орт звезды в связанной системе определяют:

где МП1 - матрица перехода от приборной к связанной системе координат:
В начале расчетов, когда неизвестны погрешности ориентации, их полагают нулевыми, поэтому орт звезды  непосредственно переводят в орт звезды в ТОСК
непосредственно переводят в орт звезды в ТОСК  с учетом различного направления осей связанной и текущей систем координат (ТОСК: ось S - по радиус-вектору, ось Т - по трансверсали, ось W - по бинормали орбиты):
с учетом различного направления осей связанной и текущей систем координат (ТОСК: ось S - по радиус-вектору, ось Т - по трансверсали, ось W - по бинормали орбиты):

После выработки углов ориентации формируют матрицу МП2. Тогда:

где МП2 - матрица перехода от связанной к ТОСК опорной орбиты. Одна из возможных приближенных форм этой матрицы, удобная для дифференцирования:

где ϑ - угол тангажа,
ψ - угол рыскания,
γ - угол крена.
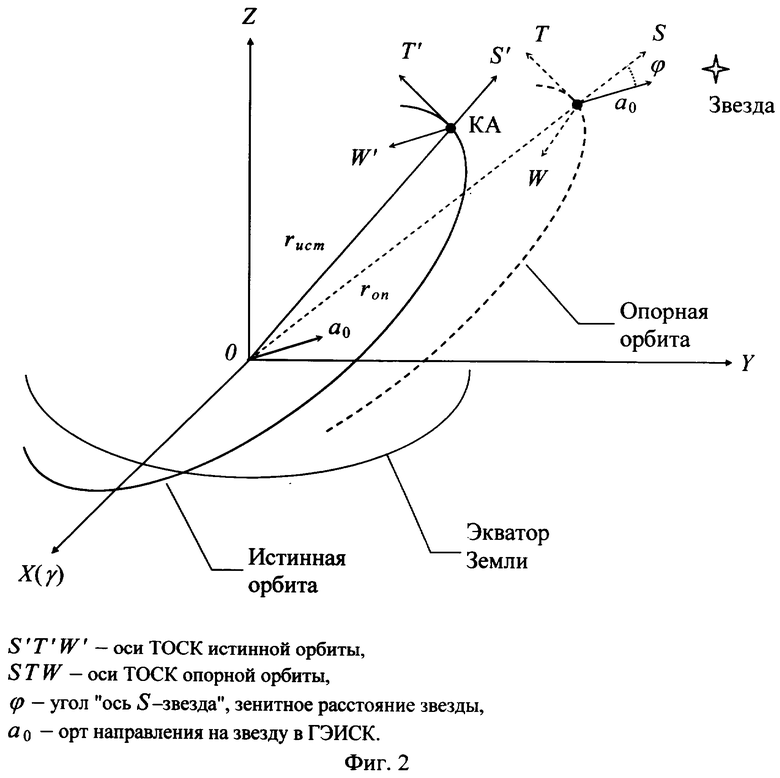
Из фиг.2 ясно, что если искомый угол ϕ определять в ГЭИСК, то различное пространственное положение осей S' и S приведет к погрешности расчета измеряемой величины. Если же расчет ϕ осуществить в ТОСК, то очевидно: как в системе S'W'Т', так и в системе STW орты соответствующих осей S0, T0, W0 будут состоять из единиц и нулей.
Например, орт  запишется
запишется  . Поэтому косинус угла между соответствующей осью ТОСК и направлением на звезду будет в точности равен соответствующей координате орта
. Поэтому косинус угла между соответствующей осью ТОСК и направлением на звезду будет в точности равен соответствующей координате орта  например:
например:

При этом, к какой орбите - опорной или истинной - отнести угол ϕi, зависит от вектора  , и поскольку последний сформирован на основе фактических измерений в ОЭП (формулы (2÷6)), ясно, что это и есть значение виртуального измерения зенитного расстояния звезды на фактической (истинной) орбите.
, и поскольку последний сформирован на основе фактических измерений в ОЭП (формулы (2÷6)), ясно, что это и есть значение виртуального измерения зенитного расстояния звезды на фактической (истинной) орбите.
Поскольку и ТОСК, и ГЭИСК - ортогональные системы, то величина угла при переходе между ними сохраняется. Это означает, что рассчитав таким образом угол, мы обходим вопрос о фактическом рассогласовании осей ТОСК опорной орбиты в сравнении с ТОСК истинной орбиты.
Последнее обстоятельство является основой утверждения о практической реализуемости алгоритма решения навигационной задачи по виртуальным измерениям. Иными словами, несмотря на то, что все решение навигационной задачи идет в ГЭИСК (как и предусматривает классический подход), расчет угла осуществляют в ТОСК.
В свою очередь, исключение из расчета угла ϕi перехода между ТОСК и ГЭИСК приводит к значительному повышению точности этого расчета и, в конечном итоге, к росту точности навигации.
Расчет местных градиентов угла ϕi осуществляют в ГЭИСК с использованием опорной орбиты. Поскольку в ГЭИСК  , где
, где  - радиус-вектор орбиты,
- радиус-вектор орбиты,  , то градиенты рассчитываются таким образом:
, то градиенты рассчитываются таким образом:
 ,
,
где  - орт опорной орбиты в ГЭИСК,
- орт опорной орбиты в ГЭИСК,
 - орт направления на звезду в ГЭИСК,
- орт направления на звезду в ГЭИСК,
q - элемент массива параметров опорного положения КА в ГЭИСК, q={x,y,z}.
После расчета угла и его градиентов собственно навигационную задачу решают традиционно, используя выбранный сглаживающий фильтр. Например, при применении метода наименьших квадратов поправки к начальной точке опорной орбиты определяют по формуле:
 ,
,
где j - номер навигационного сеанса,
n - число навигационных сеансов на мерном интервале,
G0j=Gj·Ф0j - начальные градиенты, то есть производные от текущей измеряемой функции ϕij по начальным параметрам опорной орбиты q0,
 - текущие (местные) градиенты,
- текущие (местные) градиенты,
i=1, 2 - число измерений в навигационном сеансе,
 - весовая матрица измерений на j-м навигационном сеансе,
- весовая матрица измерений на j-м навигационном сеансе,
Кϕj - матрица вторых моментов погрешностей измерений,
 - баллистические (изохронные) производные,
- баллистические (изохронные) производные,
q0, qj - соответственно начальные и текущие параметры опорной орбиты,
Δq0с - поправка к начальным параметрам опорной орбиты на с-й итерации,
Δϕij=ϕij изм-ϕij расч - невязка измерений, Δϕj={Δϕ1j, Δϕ2j}.
Матрицу Kϕj и невязки измерений рассчитывают с учетом влияния углов отклонения корпуса КА относительно осей ТОСК:

где σS, ΔS - средняя квадратическая и систематическая погрешности расчета орта радиус-вектора орбиты,
σоэп, Δоэп - аналогичные погрешности измерений в ОЭП.
Для независимых осей:
 ,
,
 ,
,
где σϑ, σψ, σγ, Δϑ, Δψ, Δγ - соответствующие погрешности системы стабилизации КА, для бортового алгоритма должны задаваться априори.
Конечные выражения для расчета производных, близких к истинному, получают, используя выражения для орта оси ОЭП в связанной системе координат и выражения для координат оси S из матрицы перехода (МП2)T.
По этой же исходной информации: измеренные координаты распознанных рабочих звезд в двух ОЭП и опорная орбита - решают задачу ориентации.
Для этого определяют значение матрицы (МП2)Т путем расчета матриц координат ортов одних и тех же звезд на истинной и опорной орбитах.
Согласно (6):

где В - матрица координат измеренных ортов трех звезд в системе Хс в, Yc в, Zс в истинной орбиты,
С - матрица координат рассчитанных ортов тех же звезд в системе ТОСК опорной орбиты. В матрицах координаты ортов располагают в столбцах.
На основе координат изображения звезды ξ, η согласно (2) и (3) рассчитывают В. Расчетные значения столбцов матрицы С формируют так:
 ,
,
где  - орты проекций осей ТОСК опорной орбиты в ГЭИСК, которые определяют на основе соотношений:
- орты проекций осей ТОСК опорной орбиты в ГЭИСК, которые определяют на основе соотношений:
 ,
,
где  - вектор скорости.
- вектор скорости.
Хотя для решения (10) требуются орты трех звезд, фактически достаточно измерить координаты двух рабочих звезд соответственно в двух ОЭП. Орт третьей звезды получают расчетным путем, полагая, что виртуальная звезда находится на перпендикуляре к плоскости, содержащей две измеряемые звезды, и опорное положение КА.
Произведение матриц В·С-1 дает численные значения элементов матрицы (МП2)T, но элемент 1,3 этой матрицы равен sinψ. При малых значениях углов ориентации
 .
.
Аналогично, используя выражения элементов 2,3 и 1,2, находят значения γ и ϑ. Рассчитанную согласно (10) матрицу проверяют на ее ортогональность. При нарушении ортогональности более чем на 10% измерение отбраковывают.
Описанный алгоритм дает мгновенное значение углов ориентации, их используют в алгоритме решения навигационной задачи, формируя (7).
Поскольку задачи навигации и ориентации решают в одном общем алгоритме практически одновременно, то уточнение ориентации корпуса КА зависит от уточнения опорной орбиты и наоборот. Поэтому используют циклический режим решения этих задач.
На первом цикле (и последующих нечетных циклах) решают параллельно обе задачи: определяют поправки к опорной орбите и углы ориентации. После окончания итераций первого цикла (и последующих нечетных циклов) углы ориентации сглаживают по методу наименьших квадратов и запоминают. При этом весовая матрица погрешностей измерений определяется как сумма погрешностей ориентации оси и погрешности измерения координат звезд в ОЭП (9). На втором цикле корректируют начальную точку опорной орбиты на величину поправок и решают только задачу навигации с учетом выработанных на первом цикле углов ориентации. Весовую матрицу погрешностей измерений определяют только погрешностями ОЭП. Как правило, это приводит к улучшению оценок опорной орбиты в смысле приближения ее параметров к истинным (фактическим) параметрам. Третий цикл начинают с уточненной начальной точки опорной орбиты, оценки ориентации обнуляют и решают снова обе задачи. С учетом вновь выработанных оценок ориентации проводят четвертый цикл, на котором решают только задачу навигации. На четных циклах суммируют невязки измерений Δϕk по всем итерациям этих циклов. По такому алгоритму чередуют и далее четные и нечетные циклы. Окончание расчетов производят по достижению условия:
Δϕk+2>Δϕk,
где k - номер четного цикла.
Количество циклов не может превышать десяти. За окончательные результаты решения задач принимают результаты k-го (или 8-го) цикла. При этом собственно измерения моделируют только на нулевой итерации первого цикла. Все расчеты проводят на изменяющейся в каждой итерации каждого цикла опорной орбите.
Моделирование решения задач навигации и ориентации с помощью двух ОЭП при циклическом режиме показало высокую точность и устойчивость получения оценок при больших (до 3-5°) погрешностях системы стабилизации КА, значительной начальной неопределенности в знании орбиты (до нескольких сотен километров), как для околокруговых орбит, так и при их значительной эллиптичности (эксцентриситет порядка 0,7).
Результаты моделирования приведены в прилагаемом акте испытания модели автономной навигации и ориентации КА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ НА ОСНОВЕ ВИРТУАЛЬНЫХ ИЗМЕРЕНИЙ ЗЕНИТНЫХ РАССТОЯНИЙ ЗВЕЗД | 2010 |
|
RU2454631C1 |
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ ОРБИТЫ И ОРИЕНТАЦИИ КОРПУСА КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ ПРИ ОТСУТСТВИИ АПРИОРНОЙ ИНФОРМАЦИИ | 2013 |
|
RU2542599C2 |
| СПОСОБ АВТОНОМНОГО ОЦЕНИВАНИЯ ИЗМЕНЕНИЙ ОРБИТЫ ВИЗИРУЕМОГО КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2624408C2 |
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ | 2021 |
|
RU2776096C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2003 |
|
RU2247945C1 |
| Способ межзвездной навигации космического корабля | 2018 |
|
RU2697866C1 |
| СПОСОБ УТОЧНЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕНТРА МАСС КА | 2000 |
|
RU2171969C1 |
| АВТОНОМНАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА ГАСАД-2А | 2005 |
|
RU2304549C2 |
| СПОСОБ ОРИЕНТАЦИИ И АВТОНОМНОЙ НАВИГАЦИИ КОСМИЧЕСКОГО АППАРАТА СИСТЕМЫ МОНИТОРИНГА ЗЕМЛИ И ОКОЛОЗЕМНОГО ПРОСТРАНСТВА | 2008 |
|
RU2376213C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2015 |
|
RU2580827C1 |
Изобретение относится к бортовой системе управления космическими аппаратами (КА) для автономной оценки орбиты и ориентации корпуса КА. Способ автономной навигации и ориентации космических аппаратов заключается в компьютерном расчете положения в трехмерном пространстве орта радиус-вектора опорной (расчетной, априори полагаемой) орбиты, жестком закреплении оптико-электронного прибора на корпусе КА и измерении в нем координат и яркости звезд, попавших в поле зрения в моменты навигационных сеансов. Технический результат: увеличение числа решаемых задач, расширение возможностей среды применения способа для любых орбит, уменьшение количества измерительных приборов и массогабаритных характеристик бортовой системы управления КА. 2 ил.
Способ автономной навигации и ориентации космических аппаратов (КА), включающий вычисление зенитных расстояний двух звезд, отличающийся тем, что измеряют приборные координаты и яркость звезд, попавших в поле зрения жестко закрепленных на корпусе КА оптико-электронных приборов (ОЭП), звезды распознают, а для определения зенитного расстояния рабочих, то есть самых ярких звезд, решения навигационной задачи, определения ориентации корпуса КА относительно текущей орбитальной системы координат, кроме информации ОЭП, используют пространственное положение радиус-вектора опорной (априори полагаемой) орбиты и другие элементы этой орбиты, которые определяют компьютерным расчетом, а также априори полагаемые (паспортные) данные о параметрах функционирования системы стабилизации КА; задачи навигации и ориентации решают параллельно, и поскольку уточнение ориентации корпуса КА относительно текущей орбитальной системы координат приводит к повышению точности решения навигационной задачи и наоборот, решение обеих задач осуществляют в циклическом режиме.
| Антонов Ю.Г., Марков С.И | |||
| Математическое и программное обеспечение системы автономной навигации | |||
| МО СССР, 1986 | |||
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2003 |
|
RU2247945C1 |
| АВТОНОМНАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА "ГАСАД" | 1993 |
|
RU2033949C1 |
| US 5054719 A1, 08.10.1991 | |||
| DE 3417661 A1, 15.11.1984. | |||

