Область техники, к которой относится изобретение
Изобретение относится к регулированию мощности турбовинтовых двигателей.
Уровень техники
В современных турбовинтовых двигателях скорость вращения воздушного винта и мощность, передаваемую на воздушный винт, контролируют при помощи регуляторов, действующих на два параметра: угол установки воздушного винта турбовинтового двигателя и расход топлива, впрыскиваемого в камеру сгорания.
В зависимости от фаз работы классически используют и чередуют два режима регулирования.
В так называемом «режиме скорости» (“speed mode” в англо-саксонской терминологии) скорость воздушного винта регулируют посредством управления его углом установки. В этом варианте используют расход топлива, чтобы зафиксировать крутящий момент или мощность, подаваемую на воздушный винт.
В другом варианте, называемом «режимом бета», скорость вращения воздушного винта контролируют при помощи расхода топлива, при этом угол установки воздушного винта фиксируют в зависимости от условий полета и от рычага газа.
В этой конфигурации угол установки обычно фиксируют таким образом, чтобы он соответствовал минимальному шагу, сверх которого воздушный винт перестает работать в тяговом режиме и поэтому перестает затрачивать сообщаемую ему энергию.
В турбовинтовом двигателе скорость вращения воздушного винта можно выразить уравнением, выведенным из энергетического баланса силовой установки:
Внешние мощности, прикладываемые к системе, представляют собой мощность PwT, выдаваемую силовой турбиной, и мощность PwH, затрачиваемую воздушным винтом, и это уравнение выражает изменение кинетической энергии воздушного винта через момент инерции JTot узла воздушного винта, силовой турбины и трансмиссионного вала, и через скорость вращения ωр воздушного винта, когда внешние мощности, прикладываемые к этому воздушному винту, перестают уравновешиваться. Следовательно, средства контроля вращения воздушного винта должны модулировать мощность, выдаваемую двигателем, через расход впрыскиваемого топлива и мощность, затрачиваемую воздушным винтом.
Эту мощность, затрачиваемую воздушным винтом, можно выразить следующим образом:
PwH = СР* ρ* n3 * D5
Коэффициент мощности обозначен (СР), при этом ρ является плотностью воздуха, n является режимом вращения воздушного винта (число оборотов в минуту), D является диаметром воздушного винта.
Коэффициент мощности воздушного винта является данной, позволяющей выразить мощность, затрачиваемую воздушным винтом, и, следовательно, КПД этого воздушного винта.
Во время фаз работы летательного аппарата коэффициент мощности может резко понизиться и в некоторых случаях даже стать равным нулю. В этом случае тяговая мощность воздушного винта становится равной нулю, и энергия, выдаваемая двигателем на воздушный винт, больше не затрачивается. Это накопление энергии выражается увеличением режима вращения воздушного винта с выходом за пределы его рабочей области, и в этом случае воздушный винт считается в состоянии превышения скорости.
В более критических случаях действие относительного ветра на винт сообщает ему дополнительную энергию, что приводит к переходу значения коэффициента мощности СР в отрицательную область, в результате чего воздушный винт передает энергию на механические элементы двигателя. Это явление самопроизвольного ускорения представляет собой опасность не только для поведения летательного аппарата, но также для его механических элементов.
Следовательно, необходимо обеспечивать тяговую работу воздушного винта, контролируя параметры, влияющие на коэффициент мощности СР, чтобы поддерживать его выше минимального предельного значения коэффициента мощности СРmin, определенного во время исследовательских конструкторских работ. Минимальный коэффициент мощности СРmin может принимать разные значения в зависимости от различных параметров полета, в частности, от скорости и высоты полета. В зависимости от этих параметров создают таблицы минимальных предельных значений коэффициента мощности СРmin.
Трудность оценки минимального коэффициента мощности СРmin заставляет авиастроителя предусматривать большие запасы надежности для работы при выборе ограничения минимального угла установки βmin, соответствующего углу установки воздушного винта, когда коэффициент мощности СР имеет минимальное предельное значение СРmin. Таким образом, система регулирования мощности теряет часть своей используемой рабочей области. Эта потеря ощущается еще больше во время этапов работы, требующих очень короткого шага, таких как снижение при заходе на посадку или режим малого газа. Это приводит к нестабильности системы управления, которая не может поддерживать режим работы двигателя в этих случаях работы.
Раскрытие сущности изобретения
Основная задача изобретения состоит в преодолении недостатков, присущих известным техническим решениям.
В частности, задача изобретения состоит в повышении точности оценки минимального значения угла установки, позволяющего воздушному винту гарантированно оставаться в его тяговом режиме работы.
Другая задача состоит в непрерывной и итеративной оценке минимального значения угла установки, позволяющего воздушному винту гарантированно оставаться в его тяговом режиме работы.
Объектом изобретения является способ регулирования скорости и мощности воздушного винта газотурбинного двигателя, согласно которому применяют по меньшей мере два режима работы:
- один режим, называемый «режимом скорости», в котором управляют углом установки (β) воздушного винта в зависимости от требуемой скорости воздушного винта, тогда как расходом топлива управляют в зависимости от требуемого крутящего момента,
- другой режим, называемый «режимом β», в котором управляют расходом топлива в зависимости от требуемой скорости воздушного винта, при этом угол установки воздушного винта фиксируют в значении угла упора, который ограничивает угол установки воздушного винта в обоих режимах работы,
согласно изобретению угол упора вычисляют и обновляют непрерывно в течение полета в зависимости от параметров, относящихся к условиям полета и оцениваемых в реальном времени.
Такой способ предпочтительно имеет различные следующие дополнительные отличительные признаки, рассматриваемые отдельно или во всех возможных комбинациях:
- угол упора непрерывно вычисляют и обновляют при помощи контура оценки, корректирующего путем итераций угол упора в зависимости от параметров, относящихся к условиям полета и оцениваемых в реальном времени, а также от минимального значения коэффициента мощности, рассчитанного при проектировании;
- параметром условий полета, оцениваемым в реальном времени и используемым при непрерывном вычислении и обновлении угла упора, является число Маха спирального движения и/или характеристика режима винта;
- при каждой итерации контур оценки применяет следующую обработку:
- Считывание параметров условий полета,
- В зависимости от этих параметров и от угла упора при предыдущей итерации определение коэффициента мощности, связанного с этими параметрами и с этим углом упора,
- Сравнение этого коэффициента мощности с минимальным коэффициентом мощности, определенным при проектировании,
- В зависимости от сигнала ошибки на выходе этого этапа сравнения обновление угла упора при помощи функции коррекции;
- во время этапа определения значение коэффициента мощности определяют в зависимости от предварительно сохраненной в памяти таблицы коэффициентов мощности;
- значение минимального коэффициента мощности меняется в зависимости от одного или нескольких параметров;
- он включает в себя обнаружение достижения угла упора, причем это обнаружение приводит к переходу от «режима скорости» к «режиму β»;
- при регулировании расхода топлива применяют контур контроля мощности и контур отслеживания заданного значения скорости воздушного винта;
- он включает в себя применение интегратора, общего для указанных контуров в различных режимах регулирования расхода топлива.
Объектом изобретения является также газотурбинный двигатель, содержащий средства обработки, применяющие вышеупомянутый способ регулирования.
Краткое описание чертежей
Другие отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего описания, представленного исключительно в качестве иллюстративного и неограничивающего примера, со ссылками на прилагаемые фигуры, на которых:
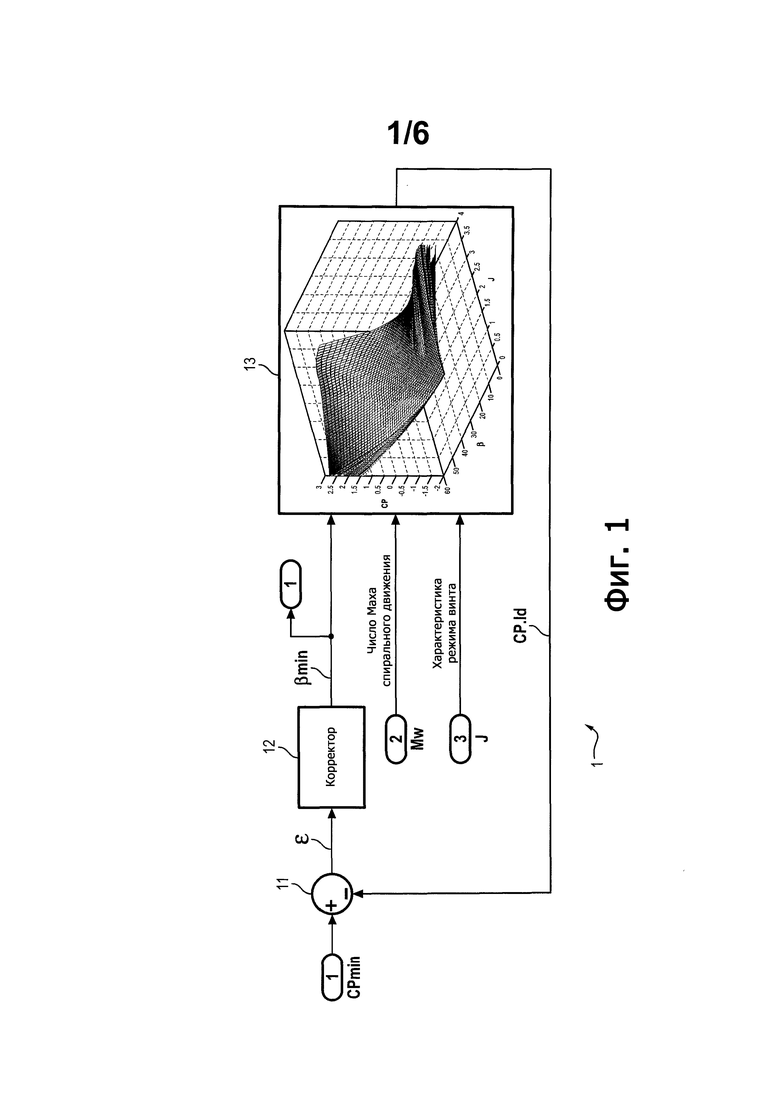
на фиг. 1 показана схема работы системы оценки значения упора угла установки βmin, соответствующего условиям полета в реальном времени;
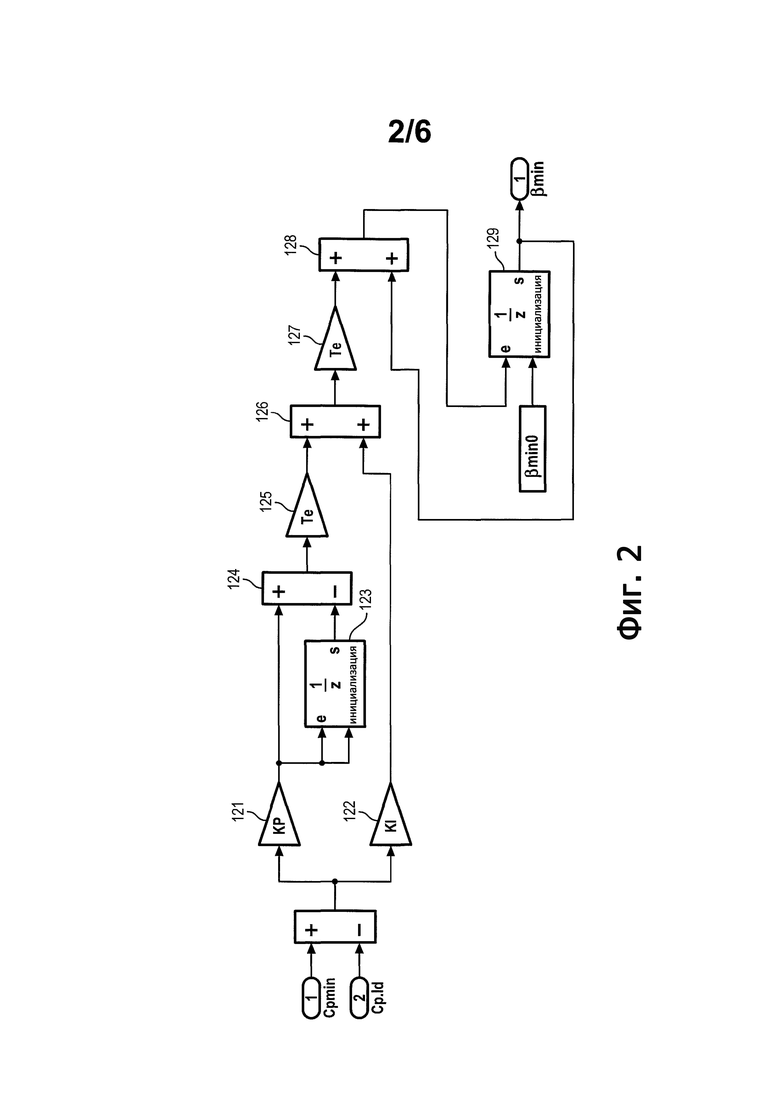
на фиг. 2 показана блок-схема работы корректора, используемого в контуре вычисления упора угла установки βmin;
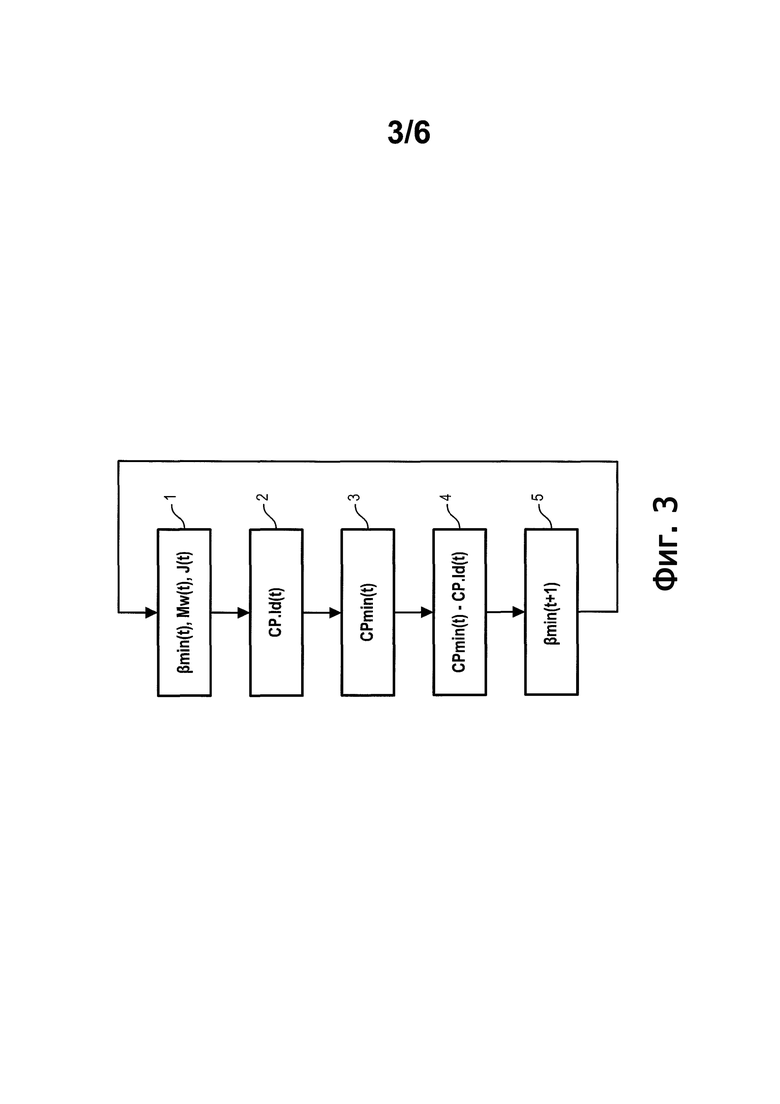
на фиг. 3 показана логическая блок-схема этапов способа непрерывной итерационной оценки упора угла установки βmin;
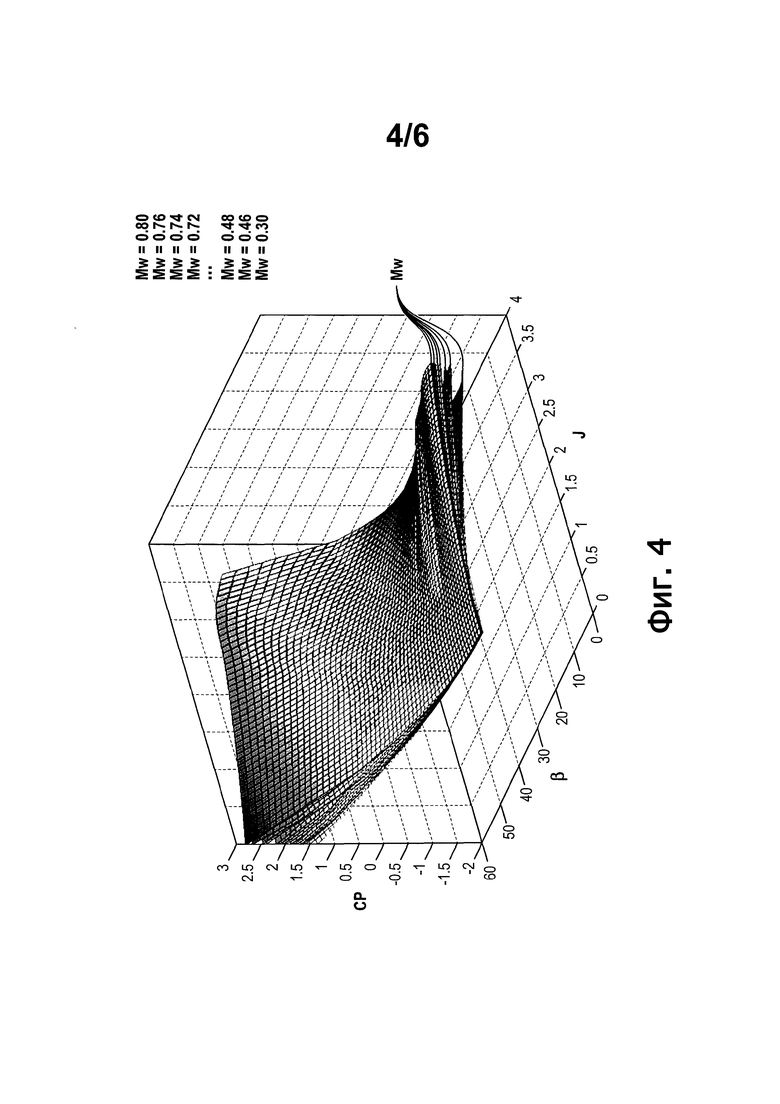
на фиг. 4 показана картография коэффициента мощности СР воздушного винта в зависимости от характеристики режима винта J, от числа Маха спирального движения при 70% радиуса Mw воздушного винта и от угла установки β воздушного винта.
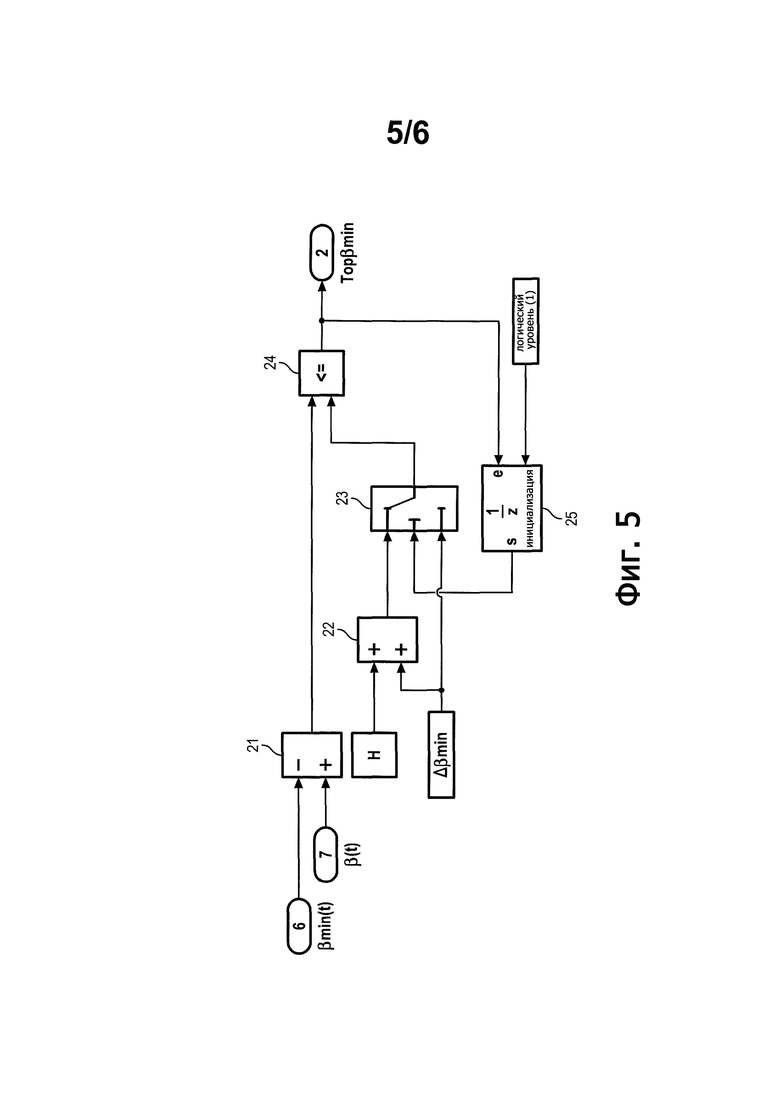
на фиг. 5 показана схема работы системы сравнения значения β и значения βmin, позволяющая обнаруживать достижение значения упора значением β.
на фиг. 6 показана схема работы системы регулирования расхода топлива, впрыскиваемого в камеру сгорания.
Описание одного или нескольких вариантов осуществления изобретения
Непрерывная итеративная оценка упора угла установки
Предложенный способ позволяет непрерывно оценивать и обновлять минимальный угол упора установки в течение полета в зависимости от параметров, связанных с условиями полета и оцениваемых в реальном времени.
Эту оценку осуществляет вычислительное устройство, установленное в летательном аппарате для управления турбовинтовым двигателем и для регулирования его мощности. Это вычислительное устройство применяет контур автоматического регулирования типа контура 1, показанного на фиг. 1.
Контур 1 автоматического регулирования имеет три входных параметра:
- минимальный коэффициент мощности СРmin, определенный первоначально при проектировании посредством исследований чувствительности,
- число Маха спирального движения Mw(t), выраженное при 70% радиуса воздушного винта,
- характеристика J(t) режима воздушного винта.
Значение СРmin минимального коэффициент мощности СРmin является, например, контрольным значением, используемым при всех условиях полета.
Оно может также быть переменным и принимать разные дискретные во времени значения в зависимости от различных параметров, таких как скорость и высота полета.
Минимальный коэффициент мощности СРmin(t) поступает в компаратор 11 вместе с идентифицированным коэффициентом мощности CP.Id(t). Ошибка ε на выходе этого компаратора 11 (разность между минимальным коэффициентом мощности СРmin и идентифицированным коэффициентом мощности CP.Id(t)) поступает в корректор 12.
Этот выбранный корректор 12 может быть пропорционально-интегральным корректором следующего выражения:

где:
- z является входным параметром,
- Те, Коэффициент усиления2 и τ2 являются параметрами корректора.
Корректор 12 преобразует дифференциальную ошибку, которую он получает на входе, в сигнал, соответствующий значению упора βmin(t) угла установки, обеспечивающему тяговый режим работы воздушного винта в условиях полета в этот момент t.
Затем выходное значение βmin(t) корректора 12 поступает в память вычислительного устройства, используемого для регулирования мощности турбовинтового двигателя, где оно заменяет старое значение упора угла установки.
Это выходное значение вместе с моментальным значением числа Маха Mw(t) спирального движения и характеристикой режима винта J(t) направляют также на вход блока 13, в памяти которого записана картография коэффициентов мощности СР.
Этот блок 13 и записанная в нем картография позволяют идентифицировать минимальный коэффициент мощности CP.Id(t+1) в зависимости от его входных параметров. После этого коэффициент CP.Id(t+1) поступает в компаратор 11 для сравнения с минимальным коэффициентом СРmin, определенным при проектировании.
Этот пример, описывающий вариант выполнения, в котором картография значений коэффициентов мощности СР учитывает три параметра, не является ограничительным. Можно учитывать другое число параметров для уточнения или упрощения этой картографии.
Этот цикл повторяют непрерывно во время всего полета.
Как показано на фиг. 2, корректор 12 получает на входе разность между минимальным коэффициентом мощности СрМin и идентифицированным коэффициентом мощности CрId. Эту входную данную направляют в два статических усилителя 121 и 122.
Выходную данную статического усилителя 121 направляют в интегратор 123 и в сумматор 124.
Сумматор 124 вычитает выходную данную интегратора 123 из выходной данной статического усилителя 121.
Выходная данная сумматора 124 поступает в статический усилитель 125, выходную данную которого сумматор 126 суммирует с выходной данной статического усилителя 122.
Затем выходную данную сумматора 126 направляют в статический усилитель 127, выходная данная которого поступает в сумматор 128, суммирующий выходную данную статического усилителя 127 с выходным сигналом βmin.
Выходную данную этого сумматора 128 направляют в интегратор 129, значение инициализации которого является значением безопасности βmin0.
Коэффициенты усиления различных статических усилителей 121, 122 регулируют эмпирическим путем.
Статические усилители 125 и 127 соответствуют периоду дискретизации и вычисления корректора.
На фиг. 3 этот же способ представлен в виде логической блок-схемы.
Первый этап (этап 1) соответствует считыванию параметров, которые позволяют осуществить способ идентификации упора угла установки βmin, в данном случае записанного в памяти упора угла установки βmin(t), числа Маха Mw(t) спирального движения и характеристики режима винта J(t).
Во время инициализации системы первый итеративный шаг принимает в качестве значения βmin значение безопасности βmin0, независимое от внешних параметров.
Эти параметры служат на втором этапе (этап 2) для идентификации соответствующего коэффициента мощности CP.Id(t) на картографии 13 коэффициента мощности СР.
После выбора (этап 3) значения минимального коэффициента мощности СРmin(t), определенного при проектировании, оба значения коэффициента мощности направляют в компаратор 11 (этап 4).
Затем разность корректируют в корректоре 12, чтобы преобразовать входную данную в заданное значение изменения упора угла установки βmin(t+1) (этап 5).
Таким образом, минимальный упор угла установки βmin вычисляют непрерывно и итеративно, сравнивая непрерывно идентифицируемый коэффициент мощности CP.Id с определенным при проектировании минимальным коэффициентом мощности СРmin, обеспечивающим работу воздушного винта в тяговом режиме.
Картография коэффициента мощности
Показанную на фиг. 4 картографию коэффициента мощности СР, используемую в блоке 13, определяют на стадии проектирования с учетом следующих трех параметров влияния:
- Числа Маха Mw спирального движения, выражаемого на расстоянии от оси вращения, эквивалентном 70% радиуса воздушного винта. Его можно выразить в зависимости от скорости полета, в данном случае обозначенной VTAS, от периферической скорости воздушного винта, в данном случае обозначенной Utip, и от скорости звука, в данном случае обозначенной cson, по формуле:
При Utip = π×n×D, где D является диаметром воздушного винта, и режим вращения n воздушного винта выражен в оборотах в секунду.
- характеристики режима винта J, которую можно выразить в зависимости от скорости полета VTAS, от режима вращения n и диаметра D воздушного винта по формуле:
- угла установки β воздушного винта.
Поскольку эти три параметра изменяются непрерывно в ходе полета в зависимости от условий, следовательно, коэффициент мощности СР воздушного винта тоже меняется в зависимости от фаз работы летательного аппарата.
Этот коэффициент мощности СР, определенный конструктором воздушного винта во время проектирования в зависимости от запросов заказчика, вносят затем в картографию в зависимости от изменений параметров, выбранных для его выражения. После этого во время проектирования картографию уточняет конструктор воздушного винта, затем конструктор самолета, чтобы минимизировать погрешности оценки.
Различные листы значений коэффициента мощности СР соответствуют разным значениям числа Маха Mw спирального движения, в данном случае составляющим от 0,30 до 0,80. Однако эти пределы не являются ограничительными, и, поскольку изменение числа Маха Mw спирального движения является плавным, это изображение предназначено только лишь для представления о влиянии различных параметров.
Обнаружение упора угла установки
Эту идентификацию упора минимального угла установки βmin используют во время режима регулирования, называемого «режимом скорости», когда скорость вращения винта регулируют, действуя на угол установки β.
При достижении этого значения упора невозможно поддерживать режим воздушного винта. Система должна перейти от режима регулирования, называемого «режимом скорости», к «режиму β».
Как показано на фиг. 5, переход от одного режима к другому происходит при помощи системы обнаружения упора минимального угла установки 2.
Контур обнаружения достижения упора угла установки имеет 4 входных параметра:
- Упор угла установки βmin(t)
- Угол установки β (t) воздушного винта
- Шаг обновления Δβmin упора угла установки
- Запас работы Н, предусматривающий эффект гистерезиса.
На входе контура значения угла установки β(t) воздушного винта и упора угла установки βmin(t) направляют в компаратор 21. Этот компаратор 21 вычитает упор угла установки βmin(t) из угла установки β(t) воздушного винта.
Две другие входные данные, то есть запас работы Н и шаг обновления Δβmin упора угла установки, поступают в сумматор 22.
Выходной сигнал сумматора 22 поступает в селектор 23 с тремя входами, который на выходе передает выходной сигнал сумматора 22.
Выходные сигналы компаратора 21 и селектора 23 поступают в логический оператор 24, который выдает выходной сигнал, когда оба входных сигнала уравниваются.
Бинарный сигнал Торβmin передается на логический уровень, соответствующий 1, если разность между углом установки β и упором βmin угла установки меньше изменения Δβmin упора угла установки, добавленного к запасу, определенному при проектировании, что приводит к эффекту гистерезиса. Этот запас позволяет избегать многократного переключения от одного режима регулирования к другому в случае работы, стабилизировавшейся на границе значения переключения.
Это можно выразить в виде уравнения:
ТорβМin = ВЕРНО, если βМin + ΔβМin +/-Н
Если сигнал Торβmin, переданный этой системой переключения управления, является верным, режим регулирования меняется и переходит от «режима скорости» к «режиму β».
Сигнал Торβmin возвращается в селектор 23 через интегратор 25.
Переключение между «режимом скорости» и «режимом β»
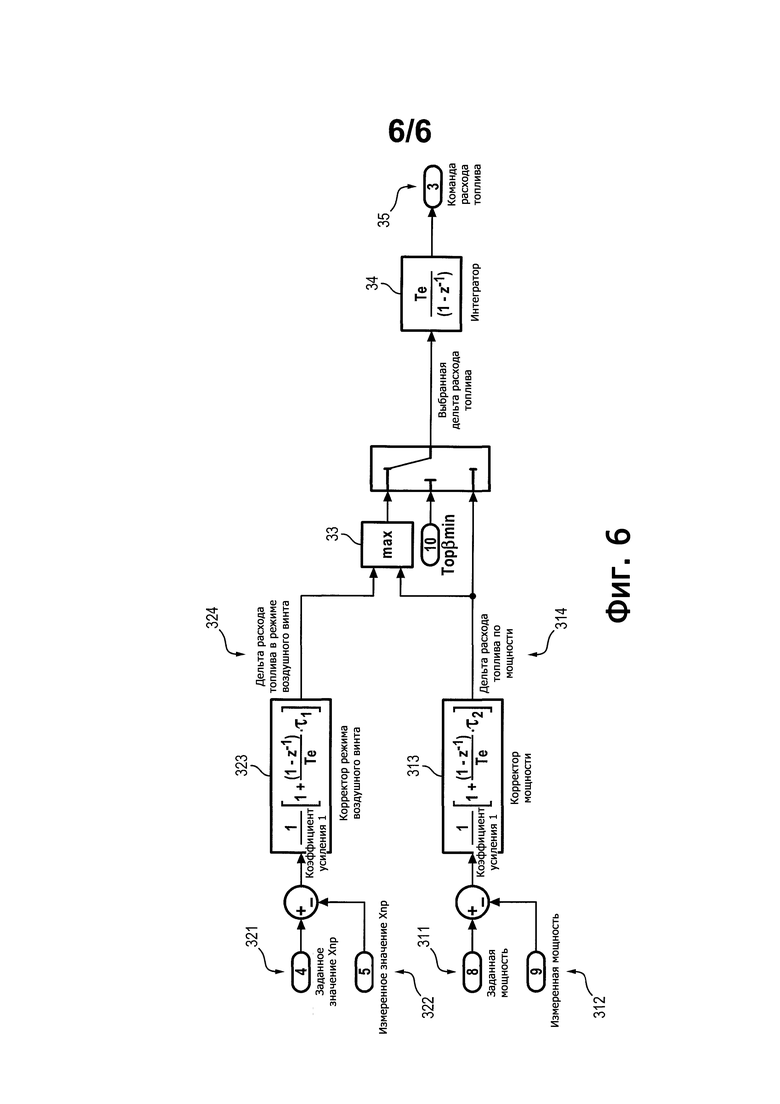
Показанная на фиг. 6 система 3 регулирования мощности позволяет модулировать расход топлива, чтобы следовать заданному значению скорости воздушного винта. Здесь наглядно показано наличие двух контуров управления расходом топлива.
Один из контуров соответствует управлению мощностью через расход топлива 31, соответствующему работе в «режиме скорости».
Заданное значение 311 мощности двигателя сравнивают с измеренной мощностью 312. Разность направляют в корректор 313 для преобразования в заданное значение изменения 314 расхода топлива, позволяющее скорректировать мощность, чтобы следовать заданному значению.
Второй контур соответствует управлению режимом 32 вращения воздушного винта, а также, в частности, поддержанию режима воздушного винта при помощи адаптации мощности через расход топлива, и соответствует работе в «режиме β».
Заданное значение 321 режима воздушного винта и, следовательно, режима двигателя, так как угол установки β зафиксирован в этом режиме, сравнивают с измеренным режимом 322. Разность направляют в корректор 323 для преобразования в заданное значение изменения 324 расхода топлива, что позволяет следовать заданному значению режима двигателя.
Если выходной сигнал детектора упора Торβmin определяют как верный, оператор 33 сравнивает эти два значения 314, 324.
Контур управления расходом топлива, предложивший команду на наибольшее изменение расхода топлива, будет опережать другой контур, что соответствует оператору «max».
Интегратор 34 корректоров переключается на конец цикла после оператора max 33, чтобы интегрировать только разность между действительной командой 35 системы и ответом, что позволяет избежать эффекта «wind up» системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЯ | 2013 |
|
RU2638883C2 |
| СМЕШАННАЯ СИСТЕМА УПРАВЛЕНИЯ АВИАЦИОННЫМ ДВИГАТЕЛЕМ И СООТВЕТСТВУЮЩИЙ СПОСОБ РЕГУЛИРОВАНИЯ | 2018 |
|
RU2779250C2 |
| СПОСОБ УПРАВЛЕНИЯ ТУРБОВИНТОВОЙ СИЛОВОЙ УСТАНОВКОЙ САМОЛЕТА | 2011 |
|
RU2493051C2 |
| Асимметричный воздухозаборник для трехконтурного двигателя сверхзвукового самолета | 2018 |
|
RU2670664C9 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ С БОЛЬШИМ РАДИУСОМ ДЕЙСТВИЯ | 2008 |
|
RU2473454C2 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ С БОЛЬШИМ РАДИУСОМ ДЕЙСТВИЯ И ОПТИМИЗИРОВАННЫМ ПОДЪЕМНЫМ НЕСУЩИМ ВИНТОМ | 2008 |
|
RU2445236C2 |
| СПОСОБ ПОВЫШЕНИЯ СИЛЫ ТЯГИ И КПД ВОЗДУШНОГО ВИНТА И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2008 |
|
RU2388652C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ТУРБОВИНТОВОГО ДВИГАТЕЛЯ | 1992 |
|
RU2022144C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ВОЗДУШНЫХ СУДОВ | 2011 |
|
RU2460982C1 |
| АВИАЦИОННАЯ СИЛОВАЯ УСТАНОВКА НА БАЗЕ ТОПЛИВНЫХ ЭЛЕМЕНТОВ | 2012 |
|
RU2492116C1 |
Изобретение относится к способу регулирования скорости и мощности воздушного винта газотурбинного двигателя, согласно которому применяют по меньшей мере два режима работы: один режим, называемый «режимом скорости», в котором управляют углом установки (β) воздушного винта в зависимости от требуемой скорости воздушного винта, тогда как расходом топлива управляют в зависимости от требуемого крутящего момента; другой режим, называемый «режимом β», в котором управляют расходом топлива в зависимости от требуемой скорости воздушного винта, при этом угол установки (β) воздушного винта фиксируют в значении угла упора (βmin), который ограничивает угол установки воздушного винта в обоих режимах работы, при этом угол упора (βmin(t)) вычисляют и обновляют непрерывно в течение полета в зависимости от параметров, относящихся к условиям полета и оцениваемых в реальном времени. Объектом изобретения является также газотурбинный двигатель, содержащий средства обработки, применяющие вышеупомянутый способ регулирования. Изобретение позволяет воздушному винту гарантированно оставаться в его тяговом режиме работы. 2 н. и 8 з.п. ф-лы, 6 ил.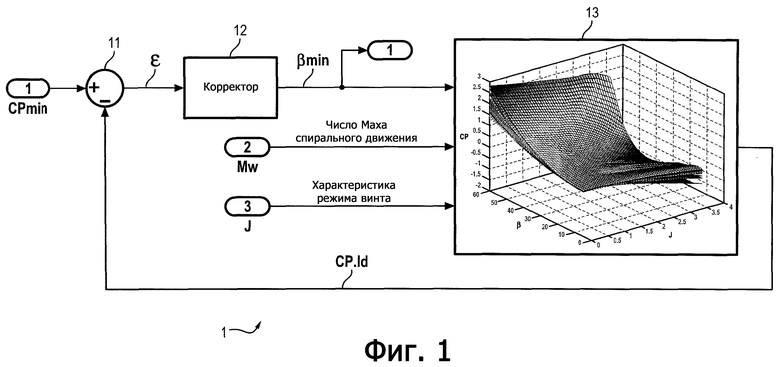
1. Способ регулирования скорости и мощности воздушного винта газотурбинного двигателя, согласно которому применяют по меньшей мере два режима работы:
- один режим, называемый «режимом скорости», в котором управляют углом установки (β) воздушного винта в зависимости от требуемой скорости воздушного винта, тогда как расходом топлива управляют в зависимости от требуемого крутящего момента,
- другой режим, называемый «режимом β», в котором управляют расходом топлива в зависимости от требуемой скорости воздушного винта, при этом угол установки (β) воздушного винта фиксируют в значении угла упора (βmin), который ограничивает угол установки воздушного винта в обоих режимах работы,
отличающийся тем, что угол упора (βmin(t)) вычисляют и обновляют непрерывно в течение полета в зависимости от параметров, относящихся к условиям полета и оцениваемых в реальном времени.
2. Способ регулирования по п. 1, отличающийся тем, что угол упора (βmin(t)) непрерывно вычисляют и обновляют при помощи контура (1) оценки, корректирующего путем итераций угол упора (βmin(t)) в зависимости от параметров, относящихся к условиям полета и оцениваемых в реальном времени, а также от минимального значения коэффициента мощности (СРmin), рассчитанного при проектировании.
3. Способ регулирования по одному из пп. 1 или 2, отличающийся тем, что параметром условий полета, оцениваемым в реальном времени и используемым при непрерывном вычислении и обновлении угла упора, является число Маха (Mw(t)) спирального движения и/или характеристика режима винта (J(t)).
4. Способ регулирования по п. 2, отличающийся тем, что при каждой итерации контур (1) оценки применяет следующую обработку:
- считывание параметров условий полета (Mw(t)) и (J(t)),
- в зависимости от этих параметров и от угла упора (βmin(t)) при предыдущей итерации определение коэффициента мощности (CP.Id(t)), связанного с этими параметрами и с этим углом упора (βmin(t)),
- сравнение этого коэффициента мощности (CP.Id(t)) с минимальным коэффициентом мощности (СРmin), определенным при проектировании,
- в зависимости от сигнала ошибки на выходе этого этапа сравнения обновление угла упора (βmin(t+1)) при помощи функции коррекции.
5. Способ регулирования по п. 4, отличающийся тем, что во время этапа определения значение коэффициента мощности (CP.Id(t)) определяют в зависимости от предварительно сохраненной в памяти таблицы (13) коэффициентов мощности (СР).
6. Способ регулирования по п. 2, отличающийся тем, что значение минимального коэффициента мощности (СРmin(t)) меняется в зависимости от одного или нескольких параметров.
7. Способ регулирования по одному из пп.1-6, отличающийся тем, что включает в себя обнаружение (2) достижения угла упора (βmin), причем это обнаружение приводит к переходу от «режима скорости» к «режиму β».
8. Способ регулирования по одному из пп. 1-7, отличающийся тем, что при регулировании (3) расхода топлива применяют контур (31) контроля мощности и контур (32) отслеживания заданного значения скорости воздушного винта.
9. Способ регулирования по п. 8, отличающийся тем, что включает в себя применение интегратора (34), общего для указанных контуров (31, 32) на различных режимах регулирования расхода топлива.
10. Газотурбинный двигатель, содержащий средства обработки, применяющие способ регулирования по пп. 1-9.
| WO 2014083259 A1, 05.06.2014 | |||
| СПОСОБ И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ГАЗОВОЙ ТУРБИНОЙ И ГАЗОВАЯ ТУРБИНА, СОДЕРЖАЩАЯ ТАКУЮ СИСТЕМУ | 2010 |
|
RU2509905C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2002 |
|
RU2221929C1 |

