Изобретение относится к авиационному двигателестроению, в частности к системам управления соосными воздушными винтами турбовинтовентиляторного двигателя (ТВВД).
Известны системы управления частотами вращения воздушных винтов ТВД. Недостатком таких систем является низкое качество управления.
Известна система управления воздушными винтами ТВВД с дифференциальным редуктором, содержащая последовательно соединенные датчик положения рычага управления двигателем, программное задающее устройство, первый сумматор и регулятор подачи топлива, выход которого соединен с вторым инверсным входом первого сумматора и является первым выходом системы по сигналу подачи топлива, задающее устройство, вход которого соединен с выходом датчика положения рычага управления двигателем, а первый выход соединен с последовательно соединенными вторым сумматором и регулятором частоты вращения переднего воздушного винта, выход которого является вторым выходом системы по сигналу угла поворота лопастей переднего воздушного винта, датчик числа оборотов переднего винта, выход которого соединен с вторым инверсным входом второго сумматора, последовательно соединенные второй выход задающего устройства, третий сумматор и регулятор частоты вращения заднего воздушного винта, выход которого является третьим выходом системы по сигналу угла поворота лопастей заднего воздушного винта, датчик числа оборотов заднего винта, выход которого соединен с вторым инверсным входом третьего сумматора, датчик температуры на входе в компрессор ТВВД, датчик давления на входе в компрессор ТВВД, выходы которых соединены соответственно с вторым и третьим входами программного задающего устройства.
Недостатком данной системы является то, что она обладает низкой динамической точностью на установившихся режимах. Также из-за низкой динамической точности данная система неприменима на динамических (приемистость) режимах, т. к. отсутствует учет влияния динамики вращающихся инерционных масс газогенератора при формировании управляющих воздействий регуляторов винтов на исполнительные механизмы. На величину динамической погрешности существенно влияет изменение величины крутящего момента, подводимого к винтам, при изменении режима работы двигателя, что также не учитывается в данной системе. Кроме того, динамическая точность управления существенно зависит от взаимного влияния двух соосных воздушных винтов, что также не увеличивается в данной системе.
Цель изобретения - повышение динамической точности регулирования ТВВД с соосными винтами на переходных и установившихся режимах работы.
Это достигается тем, что в систему управления соосными воздушными винтами турбовинтовентиляторного двигателя, содержащую последовательно соединенные датчик положения рычага управления двигателя, программное задающее устройство, первый сумматор и регулятор подачи топлива, выход которого соединен со вторым инверсным входом первого сумматора и является первым выходом системы по сигналу подачи топлива, последовательно соединенные задающее устройство, вход которого соединен с выходом датчика положения рычага управления двигателем, второй сумматор и регулятор частоты вращения переднего винта, выход которого является вторым выходом системы по сигналу угла поворота лопастей переднего винта, датчик числа оборотов переднего винта, выход которого соединен с вторым инверсным входом второго сумматора, последовательно соединенные второй выход задающего устройства, третий сумматор и регулятор частоты вращения заднего винта, выход которого является третьим выходом системы по сигналу угла поворота лопастей заднего винта, датчик числа оборотов заднего винта, выход которого соединен с вторым инверсным входом третьего сумматора, датчик температуры на входе в компрессор низкого давления, датчик давления на входе в компрессор низкого давления, выходы которых соединены соответственно с вторым и третьим входами программного задающего устройства, дополнительно вводятся датчик числа оборотов компрессора низкого давления, датчик числа оборотов компрессора высокого давления, датчик расхода топлива, четыре дифференциатора, а регуляторы частоты вращения переднего и заднего винтов выполнены в виде двенадцати умножителей, двух интеграторов, двенадцати функциональных преобразователей, причем выход датчика числа оборотов компрессора высокого давления соединен с входом первого, второго, третьего, четвертого, пятого, шестого, седьмого, восьмого, девятого, десятого, одиннадцатого и двенадцатого функциональных преобразователей, выходы которых соединены с первыми входами первого, второго, третьего, четвертого, пятого, шестого, седьмого, восьмого, девятого, десятого, одиннадцатого и двенадцатого умножителей соответственно, третий, четвертый, пятый шестой и седьмой инверсные входы второго сумматора соединены с выходами первого, второго, третьего, четвертого, пятого умножителей, а его выход соединен с вторым входом шестого умножителя, выход которого соединен с входом первого интегратора, входы третьего сумматора соединены соответственно с выходами седьмого, восьмого, девятого, десятого, одиннадцатого умножителей, а его выход соединен с вторым входом двенадцатого умножителя, выход которого соединен с входом второго интегратора, входы первого, второго, третьего и четвертого дифференциаторов соединены соответственно с выходами датчика частоты вращения компрессора низкого давления, датчика частоты вращения переднего винта, датчика частоты вращения заднего винта и датчика расхода топлива, выходы первого, второго, третьего и четвертого дифференциаторов соединены со вторыми входами соответственно первого и седьмого, второго и восьмого, третьего и девятого, четвертого и десятого умножителей, выход шестого умножителя соединен с вторым входом одиннадцатого умножителя, а выход двенадцатого умножителя соединен с вторым входом пятого умножителя.
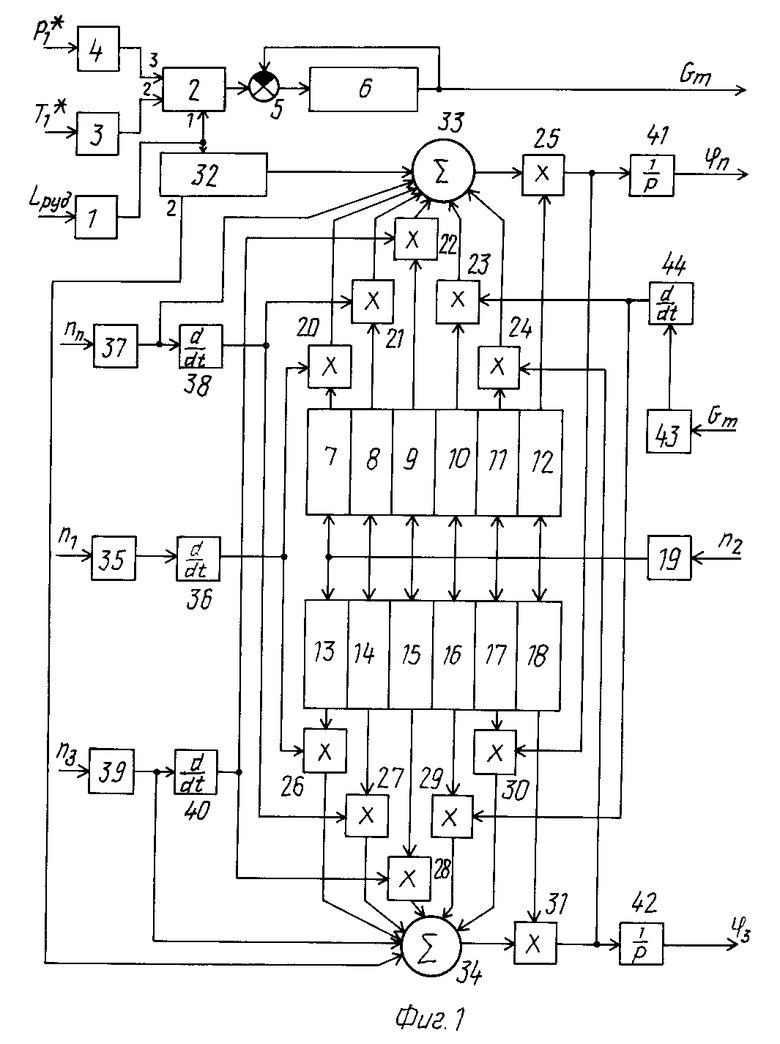
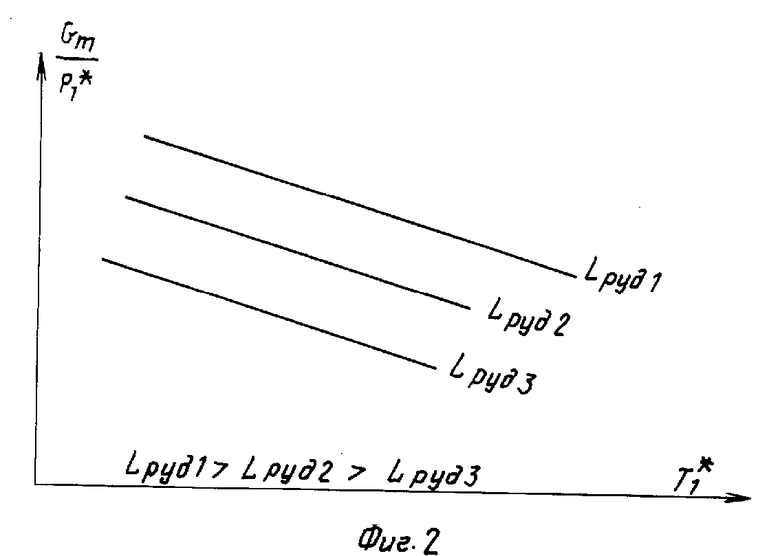
На фиг. 1 представлена структурная схема системы управления воздушными винтами ТВВД; на фиг. 2 - графическая форма зависимости

 , где Gтзад - заданный расход топлива. Функциональная схема блока 2, реализующая алгоритм формирования величины Gтзад, представлена на фиг. 3, где К, С и В - постоянные коэффициенты.
, где Gтзад - заданный расход топлива. Функциональная схема блока 2, реализующая алгоритм формирования величины Gтзад, представлена на фиг. 3, где К, С и В - постоянные коэффициенты.
Таким образом, сигнал Gтзад формируется в блоке 2 в функции давления Р1* и температуры T1* заторможенного потока воздуха, а также положения рычага управления двигателем аруд.
Функциональная схема блока 6, реализующая изодромный регулятор Gт, представлена на фиг. 4, где
WG= K - передаточная функция (Тиз = 3 с, Тс = 0,1 с) изодромного регулятора; Кчэ - коэффициент передачи изодромного регулятора.
- передаточная функция (Тиз = 3 с, Тс = 0,1 с) изодромного регулятора; Кчэ - коэффициент передачи изодромного регулятора.
При практической реализации программы дросселирования применяется дросселирование только по подаче топлива, т.е. снижением температуры газов при nпзад = =nззад = const. Зависимость задающего воздействия nпзад и nззад от α руд при таком способе дросселирования показана на фиг. 5, где α мг и α 1 - положения рычага управления двигателем на режиме малого газа и максимальной частоте вращения воздушного винта соответственно;α мах - положение рычага управления двигателем, соответствующее режиму максимальной мощности двигателя. Поэтому алгоритм формирования величин nпзад (α руд) и nззад (α руд) представляется в виде
n

 где А - коэффициент пропорциональности; nмг и nмах - частота вращения воздушного винта на режимах малого газа и максимального - соответственно.
где А - коэффициент пропорциональности; nмг и nмах - частота вращения воздушного винта на режимах малого газа и максимального - соответственно.
Функциональная схема блока 32, реализующая этот алгоритм, представлена на фиг. 6.
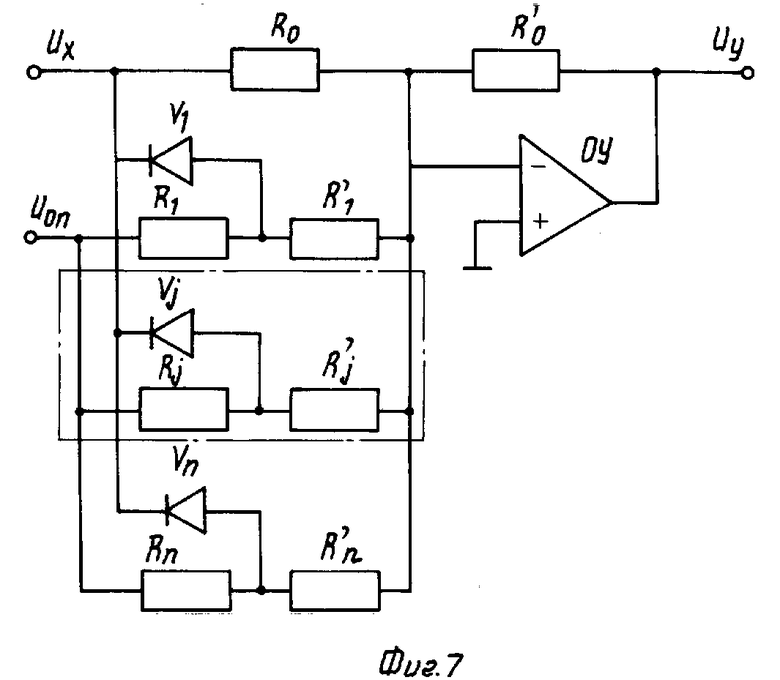
Функциональные преобразователи 7,...,18 осуществляют кусочно-линейную аппроксимацию однозначных вещественных функций Кij и K2j (j = 1, 6). Конкретная реализация возможна по принципиальной схеме кусочно-линейного преобразователя на диодных ограничителях, приведенной на фиг. 7.
Структурная схема системы управления воздушными винтами ТВВД имеет три управляющих воздействия: расход топливам в основную камеру сгорания - Gт, угол поворота переднего винта ϕп и угол поворота заднего винта ϕз, одно задающее воздействие - положение рычага управления двигателем α руди пять выходных двигательных параметров: число оборотов переднего воздушного винта nп, число оборотов заднего воздушного винта nз, число оборотов компрессора низкого давления ni, число оборотов компрессора высокого давления n2, расход топлива Gт, включает в себя датчик 1 положения рычага управления двигателя, программное задающее устройство 2, датчик 3 температуры воздуха на входе в компрессор низкого давления, датчик 4 давления воздуха на входе в компрессор низкого давления, сумматор 5, регулятор Gт 6, функциональные преобразователи 7-18, датчик 19 числа оборотов компрессора высокого давления, умножители 20-31, задающее устройство 32, сумматоры 33, 34, датчик 35 числа оборотов компрессора низкого давления, дифференцатор 36, датчик 37 числа оборотов переднего винта, дифференциатор 38, датчик числа оборотов заднего винта 39, дифференцатор 40, интеграторы 41, 42, датчик 43 расхода топлива, дифференциатор 44, регуляторы 45, 46 частоты вращения переднего и заднего винтов, причем сигнал α руд с датчика 1 поступает на первый вход программного задающего устройства 2, на второй и третий входы которого поступают сигналы Ti* и Рi* с датчиков 3 и 4 соответственно, а выход соединен с первым входом сумматора 5, выходом соединенного с входом регулятора 6, выход которого соединен с вторым инверсным входом сумматора 5 и является первым выходом системы по сигналу подачи топлива, входы функциональных блоков 7-18 соединены с выходом датчика 19 числа оборотов компрессора высокого давления, а их выходы соединены с первым и входами умножителей 20-31 соответственно, выход датчика α руд 1 соединен с входом задающего устройства 32, первый выход которого соединен с первым входом сумматора 33, а второй выход - с первым входом сумматора 34, выход датчика числа оборотов компрессора низкого давления 35 соединен с входом дифференциатора 36, выход которого соединен с вторыми входами умножителей 20 и 26, выход датчика 37 соединен с вторым инверсным входом сумматора 33 и с входом дифференцииатора 36, выход которого соединен с вторыми входами умножителей 21 и 27, выход датчика числа оборотов заднего винта 39 соединен с вторым инверсным входом сумматора 34 и с входом дифференциатора 40, выход которого соединен с вторыми входами умножителей 22 и 28, третий, четвертый, пятый, шестой или седьмой инверсные входы сумматора 33 связаны с выходами умножителей 20-24 соответственно, третий, четвертый, пятый, шестой и седьмой инверсные входы сумматора 34 соединены с выходами умножителей 26-30 соответственно, выход сумматора 33 соединен с вторым входом умножителя 25, выход которого соединен с вторым входом умножителя 30 и входом интегратора 41, выход которого является вторым выходом системы по углу поворота лопастей переднего винта, выход сумматора 34 соединен с вторым входом умножителей 31, выход которого соединен с вторым входом умножителя 24 и с входом интегратора 42, выход которого является третьим выходом системы по сигналу угла поворота лопастей заднего винта, выход датчика 43 расхода топлива соединен с входом дифференциатора 44, выход которого соединен с вторыми входами умножителей 23 и 29.
Система работает следующим образом.
При работе двигателя в зависимости от величины Рi* и Тi*, поступающих с датчиков 3 и 4, а также положения рычага управления двигателя в программном задающем устройстве 2 и задающем устройстве 32 формируются величины заданного расхода топлива Gтзад, заданного числа оборотов переднего воздушного винта nпзад и заданного числа оборотов заднего воздушного винта nззад.
Сигнал Gтзад, поступая на первый вход первого сумматора 5, сравнивается с текущей величиной Gт, поступающей с выхода регулятора Gт6 и являющейся первым управляющим сигналом систем. Таким образом, величина ошибки рассогласования е = Gзад - Gт стремится к 0.
Величина nпзад, поступая на первый вход второго сумматора 33 сравнивается с величиной nп, поступающей с датчика 37, формируя сигнал е1 = nпзад - nп. Из полученного сигнала е1 вычитается величина, поступающая на третий инверсный вход сумматора 33 с выхода первого умножителя 20, где производится умножение величины К11, поступающей с выхода функционального преобразователя 7, и n1, поступающей с выхода первого дифференциатора 1. Из полученной величины nпзад - nп - К11n1вычитается величина, поступающая на четвертый инверсный вход сумматора 33 с выхода блока 21, где производится умножение величины К12, поступающей с выхода функционального преобразователя 8 и nп, поступающей с выхода дифференциатора 38. Из полученной величины nпзад - nп - К11n1 - K12nп вычитается величина, поступающая на пятый инверсный вход сумматора 33 с выхода блока 22, где производится умножение величины К13, поступающей с выхода функционального преобразователя 9, и n3, поступающей с выхода дифференциатора 40. Из полученной величины nпзад - nп - К11n1 - К12nп - К13n3 вычитается величина, поступающая на шестой инверсный вход сумматора 33 с выхода блока 23, где производится умножение величины К14, поступающей с выхода функционального преобразователя 10, и Gт, поступающей с выхода дифференциатора 44. Из полученной величины nпзад - nп - K11n1 - K12nп - К13n3 - K14Gтвычитается величина, поступающая на седьмой инверсный вход сумматора 33 с выхода блока 24, где производится умножение величин К15, поступающей с выхода функционального блока 11, и ϕ3, поступающей с выхода блока 31. Далее полученная величина nпзад - nп - K11n1 - K12nп - К13n3 -К14Gт - К15ϕз с выхода сумматора 33, поступая на второй вход блока 25, умножается на величину К16, поступающую с выхода функционального блока 12. По- лученная величина ϕп = (nпзад - nп - К11n1 - K12nп - К13nз - К14Gт - К15ϕз)К16 интегрируется в интеграторе 41 и величина ϕп является вторым управляющим выходом системы по углу установки лопастей переднего воздушного винта. Величина nпзад, поступая на первый вход третьего сумматора 34, сравнивается с величиной n3, поступающей с датчика 39, формируя сигнал е2 = nззад - nз. Из по- лученного сигнала е2 вычитается величина, поступающая на третий инверсный вход сумматора 34 с выхода блока 26, где производится умножение величин К21, поступающей с выхода функционального преобразователя 13, и n1, поступающей с выхода первого дифференциатора 1. Из полученной величины nззад - nз - К21n1 вычитается величина, поступающая на четвертый вход сумматора 34 с выхода блока 27, где производится умножение величины К22, поступающей с выхода функционального преобразователя 14, и nп, поступающей с выхода дифференциатора 38. Из полученной величины nззад - nз - К21n1 - K22nпвычитается величина, поступающая на пятый инверсный вход сумматора 34 с выхода блока 28, где производится умножение величины К23, поступающей с выхода функционального преобразователя 15, и nз, поступающей с выхода дифференциатора 40. Из полученной величины nззад - nз - К21n1 К22nп - K23nз вычитается величина, поступающая на шестой инверсный вход сумматора 34 с выхода блока 29, где производится умножение величины К24, поступающей с выхода функционального преобразователя 16, и Gт, поступающей с выхода дифференциатора 44. Из полученной величины nззад - nз - К21n1 - K22nп - К23nз - K24Gт вычитается величина, поступающая на седьмой инверсный вход сумматора 34 с выхода блока умножения 30, где производится умножение величины К25, поступающей с выхода функционального блока 17, и ϕп, поступающей с выхода блока 25. Далее полученная величина nззад - nз - К21n1 - K22nп - К23nз - К24Gт - К25ϕп с выхода сумматора 34, поступая на второй вход блока 31, умножается на величину К26, поступающую с выхода функционального блока 18. Полученная величина ϕз = (nззад - nз - К21n1 - K22nп - К23nз - К24Gт - K25ϕп)К26интегрируется в интеграторе 42 и величина ϕз является третьим управляющим выходом системы по углу установки лопастей заднего воздушного винта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство измерения угла опережения подачи топлива в дизель | 1988 |
|
SU1657716A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ПРИВОДА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2252329C1 |
| Устройство для автоматического управления торможением автомобиля в потоке | 1989 |
|
SU1661018A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО АВТОМОБИЛЕМ | 1993 |
|
RU2037779C1 |
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ВЕСА ТОПЛИВА САМОЛЕТА | 2008 |
|
RU2377507C1 |
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ВЕСА НАГРУЗКИ САМОЛЕТА | 2003 |
|
RU2260179C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА МАСС АППАРАТА | 2000 |
|
RU2176810C2 |
| РЕГУЛЯТОР ДАВЛЕНИЯ ПЕРЕГРЕТОГО ПАРА МНОГОТОПЛИВНОГО ПАРОГЕНЕРАТОРА | 1991 |
|
RU2044213C1 |
| ТОПЛИВОМЕР | 1991 |
|
RU2019794C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ТУРБОВИНТОВОГО ДВИГАТЕЛЯ | 1992 |
|
RU2022144C1 |




Изобретение относится к авиационному двигателестороению, в частности к системам управления соосными воздушными винтами турбовинтеляторного двигателя (ТВВД). Цель изобретения - повышение динамической точности регулирования ТВВД с соосными винтами на переходных и установившихся режимах работы. В систему управления соосными воздушными винтами турбовентиляторного двигателя, содержащую датчик положения рычага управления двигателя, программное задающее устройство, первый сумматор, регулятор подачи топлива, задающее устройство, второй сумматор, регулятор частоты вращения переднего винта, датчик числа оборотов переднего винта, третий сумматор, регулятор частоты вращения заднего винта, датчик числа оборотов заднего винта, датчик температуры на входе в компрессор низкого давления, датчик давления на входе в компрессор низкого давления, дополнительно введены датчик числа оборотов компрессора низкого давления, датчик числа оборотов компрессора высокого давления, датчик расхода топлива.Регуляторы частот вращения переднего и заднего винтов выполнены в виде двенадцати умножителей, четырех дифференциаторов двух интеграторов, и двенадцати функциональных преобразователей. 7 ил.
СИСТЕМА УПРАВЛЕНИЯ ВОЗДУШНЫМИ ВИНТАМИ ТУРБОВИНТОВЕНТИЛЯТОРНОГО ДВИГАТЕЛЯ, содержащая последовательно соединенные датчик положения рычага управления двигателем, программное задающее устройство, первый сумматор и регулятор подачи топлива, выход которого соединен с вторым входом первого сумматора и является первым выходом системы по сигналу подачи топлива, последовательно соединенные задающее устройство, вход которого соединен с выходом датчика положения рычага управления двигателем, второй сумматор и регулятор частоты вращения переднего винта, выход которого является вторым выходом системы по сигналу угла поворота лопастей переднего винта, датчик числа оборотов переднего винта, выход которого соединен с вторым входом второго сумматора, последовательно соединенные с вторым выходом задающего устройства третий сумматор и регулятор частоты вращения заднего винта, выход которого является третьим выходом системы по сигналу угла поворота лопастей заднего винта, датчик числа оборотов заднего винта, выход которого соединен с вторым входом третьего сумматора, датчик температуры на входе в компрессор низкого давления и датчик давления на входе в компрессор низкого давления, выходы которых соединены соответственно с вторым и третьим входами программного задающего устройства, отличающаяся тем, что, с целью повышения динамической точности регулирования турбовинтовентиляторного двигателя с соосными винтами на переходных и установившихся режимах работы, в нее введены датчик числа оборотов компрессора низкого давления, датчик числа оборотов компрессора высокого давления, датчик расхода топлива, четыре дифференциатора, а регуляторы частот вращения переднего и заднего винтов выполнены в виде двенадцати умножителей, двух интеграторов и двенадцати функциональных преобразователей, причем выход датчика числа оборотов компрессора высокого давления соединен с входами первого - двенадцатого функциональных преобразователей, выходы которых соединены с первыми входами первого - двенадцатого умножителей соответственно, третий - седьмой входы второго сумматора соединены с выходами первого - пятого умножителей, а его выход соединен с вторым входом шестого умножителя, выход которого соединен с входом первого интегратора, третий - седьмой входы третьего сумматора соединены соответственно с выходами седьмого - одиннадцатого умножителей, а его выход соединен с вторым входом двенадцатого умножителя, выход которого соединен с входом второго интегратора, входы первого, второго, третьего и четвертого дифференциаторов соединены соответственно с выходами датчика частоты вращения, компрессора низкого давления, датчика частоты вращения переднего винта, датчика частоты вращения заднего винта и датчика расхода топлива, выходы первого - четвертого дифференциаторов соединены с вторыми входами соответственно первого и седьмого, второго и восьмого, третьего и девятого, четвертого и десятого умножителей, выход шестого умножителя соединен с вторым входом одиннадцатого умножителя, а выход двенадцатого умножителя соединен с вторым входом пятого умножителя.
