Изобретение относится к судостроению и касается разработки средств автоматизированного наблюдения за состоянием акватории с помощью безэкипажных противолодочных катеров.
Из области техники известен безэкипажный противолодочный катер типа «Флит» (Fleet class Anti-Submarine Warfare Unmanned Surface Vehicle), а именно безэкипажный катер «Тайфун-680», на борту которого имеется беспилотный летательный аппарат. Управление катером и запуском летательного аппарата осуществлялось по каналам спутниковой связи. http://zonwar.ru/news4/news_732_Taifun-680.html
Известен единый комплекс поиска и траления мин, основу которого составляли два более крупных универсальных безэкипажных надводных судна флотского класса CUSV (Common Unmanned Surface Vessel), предоставленные для проведения учения компанией AAI, входящей в концерн Textron (Германия).
Недостатками вышеуказанных технических решений, заложенных в этих проектах, является то, что не решается задача кругового обзора, что повышает вероятность позднего обнаружения опасных предметов, находящихся по курсу и в кильватере катера.
Наиболее близким техническим решением задачи является информация о мобильной надводной роботизированной системе для проведения операций по освещению обстановки и мониторингу состояния акватории (Статья «Опасности морских глубин и борьба с ними», опубликованная 25.07.2016, например конструкция аппарата Inspector Mk 2 французской компании ЕСА Group).
Система включает безэкипажный катер, выполненный в виде жесткого корпуса с дизель-электрическим комплексом, который снабжен опускаемым гидролокатором и системой автономного дистанционного управления и хранения информации, при этом система автономного дистанционного управления и хранения информации объединена с системой ГЛОНАСС/GPS/
К недостаткам известного аппарата следует отнести следующее:
- высокая стоимость и малая производительность обнаружения опасных предметов по курсу и в кильватере катера;
- целесообразность применения на БЭК ГБО с режимом синтезированной апертуры сомнительна и приводит к значительному увеличению стоимости БЭК (ГБО и системы управления БЭК) без реального повышения эффективности;
- эффективность магнитометра и профилографа для борьбы с опасными предметами заведомо недостаточна;
- недостаточное время автономности - 20 часов.
Задачей, на которую направлено создание изобретения, является разработка мобильной надводной роботизированной системы для проведения операций по освещению обстановки и мониторингу состояния акватории, включающей безэкипажный катер с дальностью хода до 300 миль, автономностью до 7 суток.
Технический результат реализации изобретения заключается в повышении вероятности обнаружения опасных предметов по курсу и в кильватере катера за счет наличия гидролокатора кругового обзора, выполненного с возможностью совершения качающихся движений от -185 угловых градусов до +185 угловых градусов от курсового угла и установленного на опускаемой штанге.
Безэкипажный катер имеет дальность хода до 300 миль, автономность до 7 суток и несет на себе гидролокатор с функцией кругового обзора, при этом гидролокатор является опускаемым, что позволяет катеру иметь максимальную скорость до 30 узлов без риска повреждения гидролокатора. Отсутствие на борту экипажа катера при выполнении задания исключает риск поражения личного состава при обнаружении опасных предметов и устройств.
Мобильная надводная роботизированная система для проведения операций по освещению обстановки и мониторингу состояния акватории, включающая безэкипажный катер, выполненный в виде жесткого корпуса с дизель-электрическим комплексом, опускаемым гидролокатором и системой автономного дистанционного управления и хранения информации. Безэкипажный катер снабжен гидролокатором кругового обзора, выполненным с возможностью совершения качающихся движений от -185 угловых градусов до +185 угловых градусов от курсового угла и установленным на опускаемой штанге в обтекателе, прозрачном для гидроакустических колебаний частотой до 5 кГц, при этом система автономного дистанционного управления и хранения информации связана с системой ГЛОНАСС/GPS и объединена с гидролокатором кругового обзора и дизель-электрическим комплексом.
Безэкипажный катер дополнительно может быть снабжен многолучевым эхолотом и донным профилографом, имеющими глубину сканирования до 100 метров, спускаемым подводным аппаратом с дальностью работы до 150 метров и глубиной погружения до 50 метров, видеокамерами в подводном исполнении до глубины 100 метров
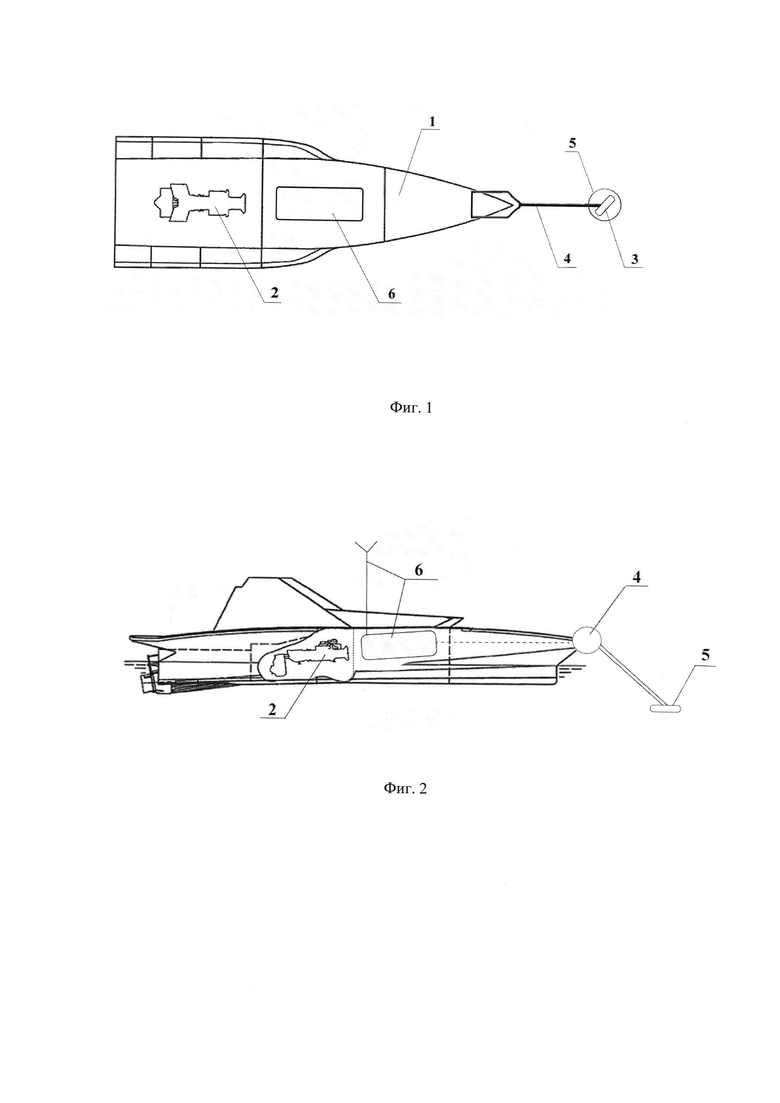
Принципиальная схема конструкции безэкипажного катера приведена на чертежах.
Фиг 1 - вид безэкипажного катера сверху.
Фиг. 2 - вид безэкипажного катера сбоку.
На фиг. 1 и на фиг. 2 обозначены позиции, где 1 - жесткий корпус, 2 - дизель-электрический комплекс, 3 - гидролокатор кругового обзора, 4 - опускаемая штанга, 5 - обтекатель, 6 - система дистанционного управления и хранения информации с антенной ГЛОНАСС/GPS.
На фиг. 2 показано положение опускаемой штанги с гидролокатором бокового обзора 3 в рабочем положении, при перемещениях на крейсерских скоростях штанга 4 поднимается из воды.
Гидролокатор кругового обзора при работе совершает качающиеся движения от -185 угловых градусов до +185 угловых градусов от курсового угла.
Передача информации от гидролокатора идет в цифровой форме.
Рабочая скорость безэкипажного катера при выполнении обследования акватории от 3 до 5 узлов, при необходимости двигаться с большей скоростью штанга 4 должна быть поднята до полного извлечения обтекателя 5 из воды до высоты, исключающей попадания волны на обтекатель.
Материалы, использованные в конструкции, должны быть стойкими к воздействию морской воды, а материал обтекателя должен быть прозрачным для гидроакустических колебаний частотой до 5 кГц (например, стеклотекстолит) и принимаемых и излучаемых антенной гидролокатора. Дизель-электрический комплекс включает в себя двигатель с электронной системой управления и генератор для питания бортовой аппаратуры.
Безэкипажный катер двигается по обследуемой акватории с крейсерской скоростью до 30 узлов, при этом опускаемая штанга 4 находится в поднятом состоянии, при достижении акватории, в которой нужно произвести обследование, скорость снижается до 3-5 узлов, штанга 4 опускается и фиксируется в рабочем положении, сигнал от антенны гидролокатора кругового обзора 3 поступает в систему управления 6 и передается на удаленное рабочее место по радиосвязи. Далее проводится сканирование акватории параллельными галсами, и при обнаружении подозрительного предмета фиксируются его координаты. По окончании сканирования акватории катер возвращается к обнаруженным предметам и проводит их более тщательное сканирование. В дальнейшем возможно применение автономного спускаемого аппарата для визуального обследования опасного предмета.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕЗЭКИПАЖНЫЙ КАТЕР, ОСНАЩЕННЫЙ УСТРОЙСТВОМ ДЛЯ ПОДЗАРЯДКИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ВЕРТОЛЕТНОГО ТИПА | 2023 |
|
RU2831111C1 |
| Мобильная система мониторинга подводной акватории | 2022 |
|
RU2796093C1 |
| Безэкипажный катер - носитель сменной полезной нагрузки | 2021 |
|
RU2760797C1 |
| МОБИЛЬНАЯ СИСТЕМА ОХРАНЫ МОРСКОГО РАЙОНА | 2023 |
|
RU2819811C1 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| СПОСОБ МОНИТОРИНГА ПОДВОДНОЙ ОБСТАНОВКИ В МОРСКОМ РАЙОНЕ | 2023 |
|
RU2797206C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| ОПЫТОВЫЙ МОРСКОЙ МОДУЛЬНЫЙ КОМПЛЕКС | 2021 |
|
RU2760823C1 |
| СПОСОБ ПРОВОДКИ, ШВАРТОВКИ И ОТШВАРТОВКИ МОРСКОГО ГРУЗОВОГО СУДНА В АВТОНОМНОМ РЕЖИМЕ И СПОСОБ РАБОТЫ ЦИФРОВОЙ ИНСТРУМЕНТАЛЬНОЙ ПЛАТФОРМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГРУППЫ АВТОНОМНЫХ СУДОВ-БУКСИРОВ В ПОРТОВОЙ АКВАТОРИИ | 2023 |
|
RU2809129C1 |
| СПОСОБ ПРОВЕРКИ ТОЧНОСТИ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2789714C1 |
Изобретение относится к судостроению и касается разработки средств автоматизированного наблюдения за состоянием акватории с помощью безэкипажных противолодочных катеров. Мобильная надводная роботизированная система для проведения операций по освещению обстановки и мониторингу состояния акватории включает в себя безэкипажный катер, выполненный в виде жесткого корпуса с дизель-электрическим комплексом, опускаемым гидролокатором, системой автономного дистанционного управления и хранения информации и системой ГЛОНАСС/GPS. Безэкипажный катер снабжен гидролокатором, который выполнен в виде гидролокатора кругового обзора с возможностью совершения качающихся движений от -185 угловых градусов до +185 угловых градусов от курсового угла и установлен на опускаемой штанге в обтекателе, прозрачном для гидроакустических колебаний частотой до 5 кГц. Система автономного дистанционного управления и хранения информации связана с гидролокатором кругового обзора, дизель-электрическим комплексом и системой ГЛОНАСС/GPS. Достигается повышение обнаружения опасных предметов по курсу и в кильватере катера. 2 ил.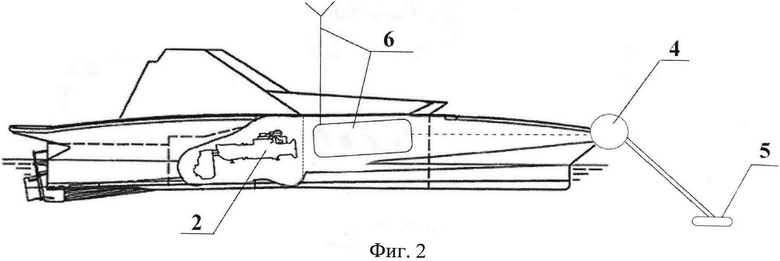
Мобильная надводная роботизированная система для проведения операций по освещению обстановки и мониторингу состояния акватории, включающая безэкипажный катер, выполненный в виде жесткого корпуса с дизель-электрическим комплексом, опускаемым гидролокатором, системой автономного дистанционного управления и хранения информации и системой ГЛОНАСС/GPS, отличающаяся тем, что безэкипажный катер снабжен гидролокатором, выполненным в виде гидролокатора кругового обзора с возможностью совершения качающихся движений от -185 угловых градусов до +185 угловых градусов от курсового угла, установленного на опускаемой штанге в обтекателе, прозрачном для гидроакустических колебаний частотой до 5 кГц, при этом система автономного дистанционного управления и хранения информации связана с гидролокатором кругового обзора, дизель-электрическим комплексом и системой ГЛОНАСС/GPS.
| Статья "Опасности морских глубин и борьба с ними" опубл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Журнал "Научно-производственное предприятие ФОРТ XXI", Статья "Гидролокатор кругового обзора 881L DIGITAL MULTIEREQUENCY IMAGING SONAR", опубл.06.09.2014, найдено в интернет: http://www.fort21.ru/cont/content.php?id=825, 18.07.2017 | |||
| Журнал "Научно-производственное предприятие ФОРТ XXI", Статья "Гидролокатор бокового обзора SportScan", опубл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОДВОДНЫМ АППАРАТОМ | 2013 |
|
RU2538316C1 |
| WO 03059734 A1, 24.07.2003. | |||

