Изобретение относится к области судостроения, в частности конструкции безэкипажного катера, использующего систему подзарядки беспилотных летательных аппаратов, в частности квадрокоптеров вертолетного типа и их подзарядки с помощью зарядных станций.
Из области техники известна мобильная надводная роботизированная система для проведения операций по освещению обстановки и мониторингу состояния акватории (Патент RU 2 639 000, 2017). Мобильная надводная роботизированная система для проведения операций по освещению обстановки и мониторингу состояния акватории включает в себя безэкипажный катер, выполненный в виде жесткого корпуса с дизель-электрическим комплексом, опускаемым гидролокатором, системой автономного дистанционного управления и хранения информации и системой ГЛОНАСС/GPS. Безэкипажный катер снабжен гидролокатором, который выполнен в виде гидролокатора кругового обзора с возможностью совершения качающихся движений от -185 угловых градусов до+185 угловых градусов от курсового угла и установлен на опускаемой штанге в обтекателе, прозрачном для гидроакустических колебаний частотой до 5 кГц. Система автономного дистанционного управления и хранения информации связана с гидролокатором кругового обзора, дизель-электрическим комплексом и системой ГЛОНАСС/GPS. Достигается повышение обнаружения опасных предметов по курсу и в кильватере катера.
Недостатком данной мобильной надводной роботизированной системы является отсутствие возможности взлета, посадки и подзарядки аккумуляторных батарей квадрокоптеров вертолетного типа.
Наиболее близким по технической сути является учебно-тренажерный безэкипажный катер (Патент RU 210 564, 2022). Учебно-тренажерный безэкипажный катер, выполненный в виде жесткого корпуса с движительно-рулевым комплексом, системой энергообеспечения, системой дистанционного и автоматического управления движением, навигационной системой с антенной ГЛОНАСС/GPS, системой связи с мобильным пунктом управления или ретранслятором, системой видеонаблюдения, метеостанцией, системой диагностики технического состояния бортовой аппаратуры, техническими устройствами обеспечения размещения и подключения сменной унифицированной аппаратуры полезной нагрузки, отличающийся тем, что движительно-рулевой комплекс состоит из двух погружных электродвигателей с гребными винтами, внутри корпуса на пружинном подвесе расположен блок радиоэлектронной аппаратуры и модуль аккумуляторной батареи, над палубой корпуса возвышается комингс, сверху которого расположена съемная пластиковая надстройка, которая герметично крепится к комингсу, к корпусу прикреплена мачта, сваренная из тонкостенных стальных труб, в кормовой части палубы установлено спускоподъемное устройство в виде П-рамы, предназначенное для автоматизированного спуска и подъема телеуправляемого необитаемого подводного аппарата, в носовой части палубы на стойках выше съемной пластиковой надстройки установлена посадочная площадка, предназначенная для автоматизированного старта и посадки квадрокоптера.
Недостатками известного устройства является отсутствие автоматизированной подзарядки аккумуляторных батарей квадрокоптеров.
Техническая задача - создание устройства для автоматизированной подзарядки аккумуляторных батарей беспилотных летательных аппаратов, в частности квадрокоптеров вертолетного типа на безэкипажном катере.
Технический результат - повышение эффективности безэкипажного катера при его использовании.
Он достигается тем, что в известном устройстве, выполненном в виде жесткого корпуса с движительно-рулевым комплексом, системой энергообеспечения, системой дистанционного и автоматического управления движением, навигационной системой с антенной ГЛОНАСС/GPS, системой связи с мобильным пунктом управления или ретранслятором, системой видеонаблюдения, метеостанцией, системой диагностики технического состояния бортовой аппаратуры, техническими устройствами обеспечения размещения и подключения сменной унифицированной аппаратуры полезной нагрузки, движительно-рулевой комплекс состоит из двух погружных электродвигателей с гребными винтами, внутри корпуса на пружинном подвесе расположен блок радиоэлектронной аппаратуры и модуль аккумуляторной батареи, над палубой корпуса возвышается комингс, сверху которого расположена съемная пластиковая надстройка, которая герметично крепится к комингсу, к корпусу прикреплена мачта, сваренная из тонкостенных стальных труб, в носовой части палубы на стойках выше съемной пластиковой надстройки установлена посадочная площадка, предназначенная для автоматизированного старта и посадки квадрокоптера, в кормовой части палубы на стойках, жестко зафиксированных на палубе установлена дополнительная посадочная площадка для посадки и подзарядки квадрокоптеров вертолетного типа, под каждой посадочной площадкой установлена и жестко зафиксирована на внутренней боковой поверхности площадки зарядная станция, связанная с зарядным терминалом, закрепленным на поверхности площадок, зарядный терминал выполнен в виде матрицы контактов прямоугольной формы, каждый контакт связан с анализатором-коммутатором, размещенным внутри зарядной станции для определения полярности остаточного напряжения полюсов аккумуляторной батареи квадрокоптера и подачи напряжения питания для подзарядки квадрокоптера.
Установка в кормовой части палубы дополнительной посадочной площадки позволяет увеличить количество квадрокоптеров, предназначенных для транспортировки на палубе судна, взлета, посадки и подзарядки. Каждая посадочная площадка оборудована зарядной станцией с анализатором-коммутатором, обеспечивающим возможность подачи напряжения питания на контакты зарядного терминала, выполненного в виде прямоугольной матрицы контактов (см. Ахмеров Ш.Р. Автоматическая система подзарядки электрических беспилотных летательных аппаратов вертолетного типа //Электротехнические и информационные комплексы и системы. - 2013. - Т. 9. - №. 1. - С. 5-9).
Выполнение зарядного терминала в виде матрицы контактов позволяет автоматизировать процесс подзарядки аккумуляторных батарей за счет того, что нет необходимости точной посадки квадрокоптеров. При контакте посадочных электродов квадрокоптера, подключенных к аккумуляторной батарее, происходит автоматическое определение полярности напряжения для подзарядки. Прямоугольная форма матрицы контактов позволяет увеличить площадь, доступную для посадки квадрокоптера до размеров верхней поверхности посадочной площадки.
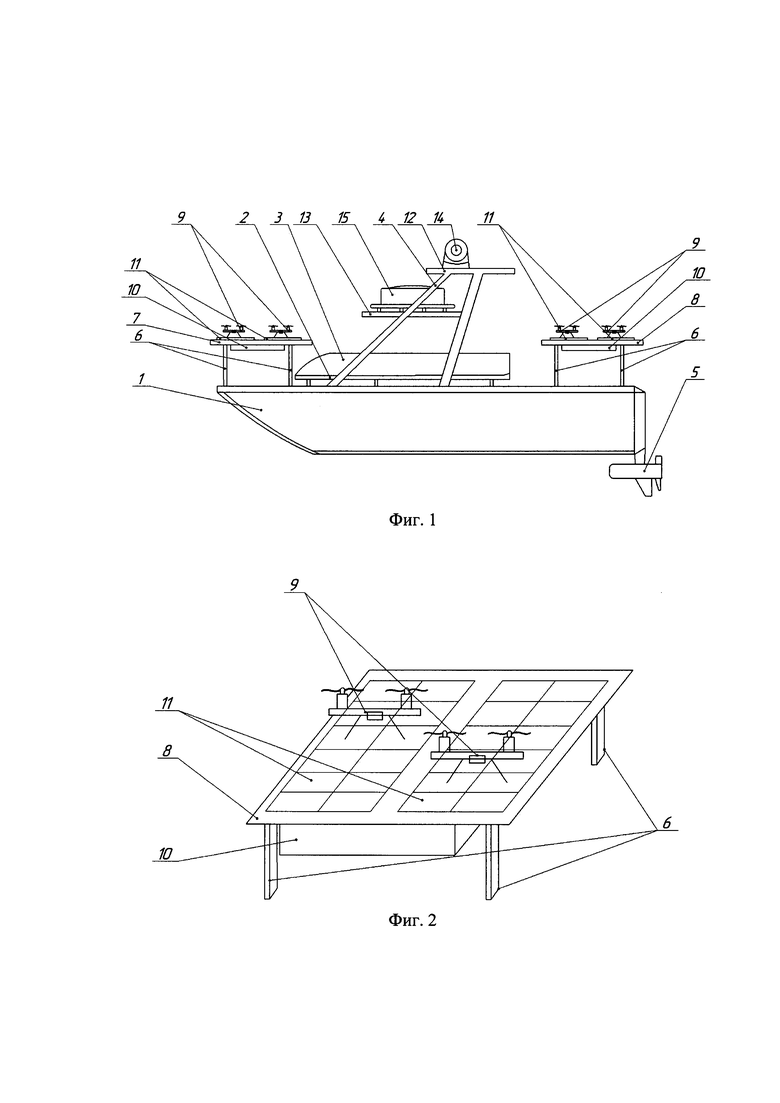
На чертеже изображен безэкипажный катер с устройством для подзарядки беспилотных летательных аппаратов вертолетного типа (Фиг. 1 - общий вид, Фиг. 2 - схематичное изображение посадочной площадки).
Конструкция безэкипажного катера, оснащенного устройством для подзарядки беспилотных летательных аппаратов вертолетного типа (Фиг. 1 - общий вид) состоит из стеклопластикового корпуса 1, над палубой корпуса возвышается комингс 2, сверху которого расположена съемная пластиковая надстройка 3, которая герметично крепится к комингсу 2. К корпусу 1 прикреплена мачта 4, сваренная из тонкостенных стальных труб. В кормовой части корпуса расположен движительно-рулевой комплекс 5, состоящий из двух погружных электродвигателей с гребными винтами. В носовой и кормовой частях катера на стойках 6 жестко закреплены посадочные площадки 7 и 8 соответственно, предназначенные для обеспечения взлета, посадки и подзарядки квадрокоптеров вертолетного типа 9. Под посадочными площадками 7 и 8 установлены и жестко зафиксированы на внутренней боковой поверхности площадки зарядные станции 10, связанные с зарядными терминалами 11, закрепленными на поверхности площадок 7 и 8. Мачта 4 выполнена сварной конструкцией из тонкостенных стальных труб, четыре из которых выполнены в виде «ног», внутри которых проходят кабельные трассы от приборов, расположенных на двух площадках - верхней 12 и нижней 13. На верхней площадке 12 находится главный оптоэлектронный модуль 14, предназначенный для визуального наблюдения за окружающей обстановкой на дистанции до 3000 м. На нижней площадке 13 находится блок антенн 15, предназначенный для обеспечения приема управляющего сигнала оператора катера. Стойки 6 обеспечивают жесткое закрепление посадочных площадок 7 и 8 на корпусе 1 безэкипажного катера. Зарядные станции 10 установлены и жестко зафиксированы на внутренних поверхностях посадочных площадок 7 и 8 и позволяют производить зарядку квадрокоптеров вертолетного типа 9 при их контакте с зарядными терминалами 11.
Устройство работает следующим образом. Подготовленный к спуску безэкипажный катер, оснащенный устройством для подзарядки беспилотных летательных аппаратов вертолетного типа, доставляют к берегу акватории наземным транспортом и при помощи автоприцепа для гидроцикла спускают на воду. Параллельно на берег доставляется и разворачивается береговой пост управления. Далее оператором катера производится проверка системы дистанционного управления, а также проверка всех вспомогательных систем. Для управления взлетом, пилотированием и посадкой квадрокоптеров вертолетного типа 9 необходима работа второго оператора, который перед спуском катера на воду производит зарядку, настройку и размещение на посадочных площадках 7 и 8 квадрокоптеров. После спуска судна на воду для выхода судна в акваторию первый оператор осуществляет дистанционное управление катером. Второй оператор управляет взлетом, полетом и посадкой квадрокоптеров вертолетного типа 9 на зарядные терминалы 11 для обеспечения автоматизированной зарядки аккумуляторов квадрокоптеров. При посадке квадрокоптеров, оснащенных посадочными электродами на зарядные терминалы 11, выполненные в виде матрицы контактов прямоугольной формы происходит автоматическое определение полярности напряжения для подзарядки. После определения полярности на посадочные электроды квадрокоптеров вертолетного типа 9 подается напряжение от бортовой электросети катера на время, необходимое для насыщения зарядом аккумулятора квадрокоптера.
Предлагаемая конструкция выгодно отличается от прототипа наличием дополнительной посадочной площадки 8 для посадки и подзарядки квадрокоптеров вертолетного типа 9 в кормовой части палубы, что позволяет повысить эффективность безэкипажного катера при его использовании за счет увеличения количества используемых квадрокоптеров вертолетного типа. Каждая посадочная площадка оборудована зарядной станцией 10 с анализатором-коммутатором, что обеспечивает процесс автоматизации подзарядки аккумуляторных батарей беспилотных летательных аппаратов, в частности квадрокоптеров вертолетного типа на безэкипажном катере.
Пример конкретного выполнения. В носовой и кормовой частях катера на стойках 6 высотой 0,3 м, выполненных из тонкостенных труб из стали 12Х18Н9 (AISI 304, DIN 1.4301) (см. Марочник сталей и сплавов. 6-е изд., стереотипное / Ю.Г. Драгунов, А.С. Зубченко, Ю.В. Каширский и др. Под общей ред. Ю.Г. Драгунова и А.С. Зубченко. - М.: Инновационное машиностроение, 2019. 1216 с: ил.) диаметром 0,06 м, жестко закреплены посадочные площадки 7 и 8, предназначенные для обеспечения взлета, посадки и подзарядки четырех квадрокоптеров вертолетного типа 9. Стойки 6 обеспечивают жесткое закрепление посадочных площадок 7 и 8 на корпусе 1 безэкипажного катера. Под посадочными площадками 7 и 8 установлены и жестко зафиксированы на внутренней боковой поверхности площадки зарядные станции 10 выходной мощностью 300 Вт, связанные с зарядными терминалами 11, закрепленными на поверхности площадок 7 и 8. Зарядные станции 10 позволяют производить одновременную зарядку до четырех квадрокоптеров вертолетного типа 9 при их контакте с зарядными терминалами 11 (см. Ахмеров Ш.Р. Автоматическая система подзарядки электрических беспилотных летательных аппаратов вертолетного типа //Электротехнические и информационные комплексы и системы. - 2013. - Т. 9. - №. 1. - С. 5-9).
Положительный эффект - предлагаемое устройство позволяет повысить эффективность безэкипажного катера, оснащенного устройством для подзарядки беспилотных летательных аппаратов вертолетного типа, в частности для осуществления мониторинга ситуации над акваторией в режиме реального времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пост наблюдения на базе привязного беспилотного летательного аппарата | 2023 |
|
RU2807768C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ФИКСАЦИИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТОЛЕТНОГО ТИПА НА ПОСАДОЧНОЙ ПЛОЩАДКЕ БЕЗЭКИПАЖНОГО СУДНА С БЕСКОНТАКТНОЙ ПЕРЕДАЧЕЙ ЭЛЕКТРОЭНЕРГИИ ДЛЯ ЗАРЯДА АККУМУЛЯТОРНЫХ БАТАРЕЙ | 2021 |
|
RU2765726C1 |
| Сторожевой корабль | 2024 |
|
RU2834069C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| Устройство для автоматической фиксации беспилотного летательного аппарата вертолетного типа | 2020 |
|
RU2751735C1 |
| Способ освещения подводной обстановки и нейтрализации обнаруженных объектов | 2022 |
|
RU2789185C1 |
| Стартовый контейнер | 2018 |
|
RU2678381C1 |
| Многофункциональное судно обеспечения морских буровых платформ и комплекс судовой системы грузообработки для применения на многофункциональном судне | 2020 |
|
RU2747109C1 |
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2017 |
|
RU2666975C1 |
| Безэкипажный катер - носитель сменной полезной нагрузки | 2021 |
|
RU2760797C1 |
Изобретение относится к области судостроения. Технический результат заключается в обеспечении автоматизированного заряда аккумуляторов беспилотных летательных аппаратов. Над палубой корпуса безэкипажного катера возвышается комингс, сверху которого расположена съемная пластиковая надстройка, которая герметично крепится к комингсу, в носовой части палубы на стойках выше съемной пластиковой надстройки установлена посадочная площадка, предназначенная для автоматизированного старта и посадки квадрокоптера, в кормовой части палубы на стойках установлена дополнительная посадочная площадка для посадки и подзарядки квадрокоптеров вертолетного типа, под каждой посадочной площадкой установлена и жестко зафиксирована на внутренней боковой поверхности площадки зарядная станция, связанная с зарядным терминалом, закрепленным на поверхности площадок, зарядный терминал выполнен в виде матрицы контактов прямоугольной формы, каждый контакт связан с анализатором-коммутатором, размещенным внутри зарядной станции для определения полярности остаточного напряжения полюсов аккумуляторной батареи квадрокоптера и подачи напряжения питания для подзарядки квадрокоптера. 2 ил.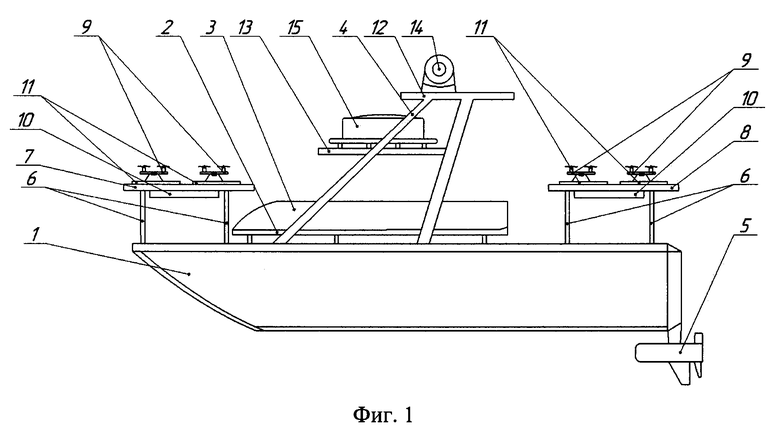
Безэкипажный катер, оснащенный устройством для подзарядки беспилотных летательных аппаратов вертолетного типа, выполненный в виде жесткого корпуса с движительно-рулевым комплексом, содержит систему энергообеспечения, систему дистанционного и автоматического управления движением, навигационную систему с антенной ГЛОНАСС/GPS, систему связи с мобильным пунктом управления или ретранслятором, систему видеонаблюдения, метеостанцию, систему диагностики технического состояния бортовой аппаратуры, технические устройства обеспечения размещения и подключения сменной унифицированной аппаратуры полезной нагрузки, движительно-рулевой комплекс состоит из двух погружных электродвигателей с гребными винтами, внутри корпуса на пружинном подвесе расположен блок радиоэлектронной аппаратуры и модуль аккумуляторной батареи, над палубой корпуса возвышается комингс, сверху которого расположена съемная пластиковая надстройка, которая герметично крепится к комингсу, к корпусу прикреплена мачта, сваренная из тонкостенных стальных труб, в носовой части палубы на стойках выше съемной пластиковой надстройки установлена посадочная площадка, предназначенная для автоматизированного старта и посадки квадрокоптера, отличающийся тем, что в кормовой части палубы на стойках, жестко зафиксированных на палубе, установлена дополнительная посадочная площадка для посадки и подзарядки квадрокоптеров вертолетного типа, под каждой посадочной площадкой установлена и жестко зафиксирована на внутренней боковой поверхности площадки зарядная станция, связанная с зарядным терминалом, закрепленным на поверхности площадок, зарядный терминал выполнен в виде матрицы контактов прямоугольной формы, каждый контакт связан с анализатором-коммутатором, размещенным внутри зарядной станции для определения полярности остаточного напряжения полюсов аккумуляторной батареи квадрокоптера и подачи напряжения питания для подзарядки квадрокоптера.
| Т-ОБРАЗНЫЙ БОЛТ | 0 |
|
SU210564A1 |
| ИНДУКЦИОННАЯ НАГРЕВАТЕЛЬНАЯ УСТАНОВКА | 0 |
|
SU205857A1 |
| KR 20220029822 A, 10.03.2022 | |||
| WO 2020220654 A1, 05.11.2020 | |||
| US 11086337 B2, 10.08.2021. | |||

