Настоящее техническое решение относится к вычислительным комплексам и компьютерным сетям с устройствами для обработки данных с воздействием на порядок расположения данных и на их содержание.
Область применения - автоматизированные системы управления организационных систем.
Известное техническое решение - интерактивная система управления робототехнической системой [1] RU 80050 U1, содержит аппаратно-программные средства для создания виртуальных сценариев и синхронизации работы компонентов системы. Техническим результатом является возможность дистанционно управлять робототехническими системами в реальном масштабе времени.
Известное техническое решение - центр управления организационной системы [2] RU 127493 U1 содержит аналитический центр, центр объективного контроля, средства контроля над объектами наблюдения организационной системы и средства связи. На основании данных контроля над объектами наблюдения обеспечивается централизованное формирование и использование управляющей информации - команд управления, сценариев работ по этим командам, для устранения или предотвращения угроз деятельности организационной системы и проведения плановых работ.
Наиболее близким аналогом предлагаемого технического решения является комплекс управления робототехническими объектами [3] RU 140887 U1, который содержит вычислительный комплекс, систему хранения данных аудита деятельности организационной системы, комплекс кодирования информации, средства связи. На основании данных контроля над объектами наблюдения обеспечивается централизованное управление робототехническими объектами. Решение [3] выполняет преобразование управляющей информации на основе сжатия информации в едином сигнале с последующим восстановлением на приемной стороне. Тем самым достигается высокий уровень скрытности факта передачи команд управления в удаленные робототехнические объекты. Однако указанный эффект достигается за счет введения в решении [3] задержки перед передачей сигнала в средства связи. Длительность задержки зависит от объема управляющей информации и частоты несущих сигналов, - чем больший объем и ниже частота, тем длительнее задержка. Поэтому, если вместе с командой управления передается сценарий, предназначенный для выполнения работ по этой команде, задержка может превысить заданное ограничение на время передачи управляющей информации, которое устанавливается для робототехнических объектов, управляемых в реальном масштабе времени, - в первую очередь, для беспилотных летательных, надводных и подводных аппаратов.
Технической задачей, на реализацию которой направлено настоящее техническое решение, и которое было выполнено с учетом описанного выше, является предложение центра управления робототехническими объектами, способного обеспечивать высокий уровень скрытности команд управления при передаче их в удаленные робототехнические объекты и подтверждений об их исполнении с учетом заданных ограничений на время передачи управляющей и подтверждающей информации.
Техническим результатом, на достижение которого направлено настоящее техническое решение, является расширение функциональных возможностей за счет автоматического выполнения оценки ожидаемого времени передачи управляющей и подтверждающей информации и автоматического кодирования управляющей и подтверждающей информации с учетом выполненной оценки.
Сущность технического решения поясняется чертежами:
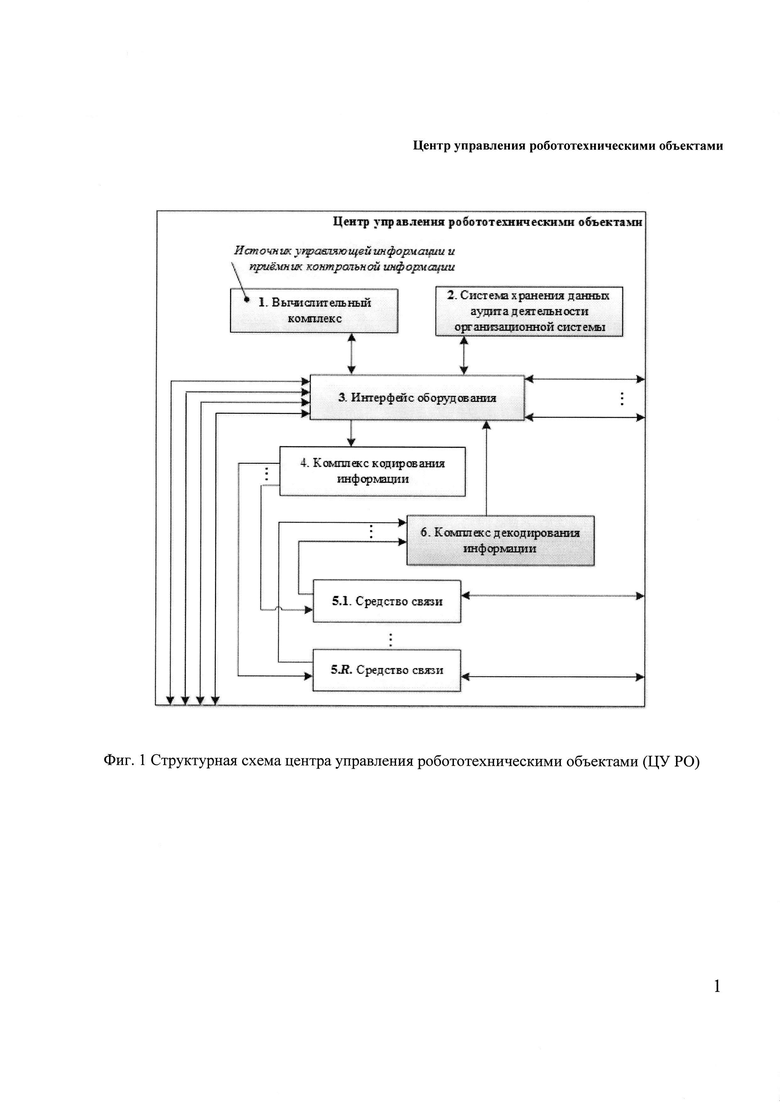
фиг. 1 - структурная схема центра управления робототехническими объектами (ЦУ РО);
фиг. 2 - структурная схема комплекса кодирования информации;
фиг. 3 - структурная схема комплекса декодирования информации;
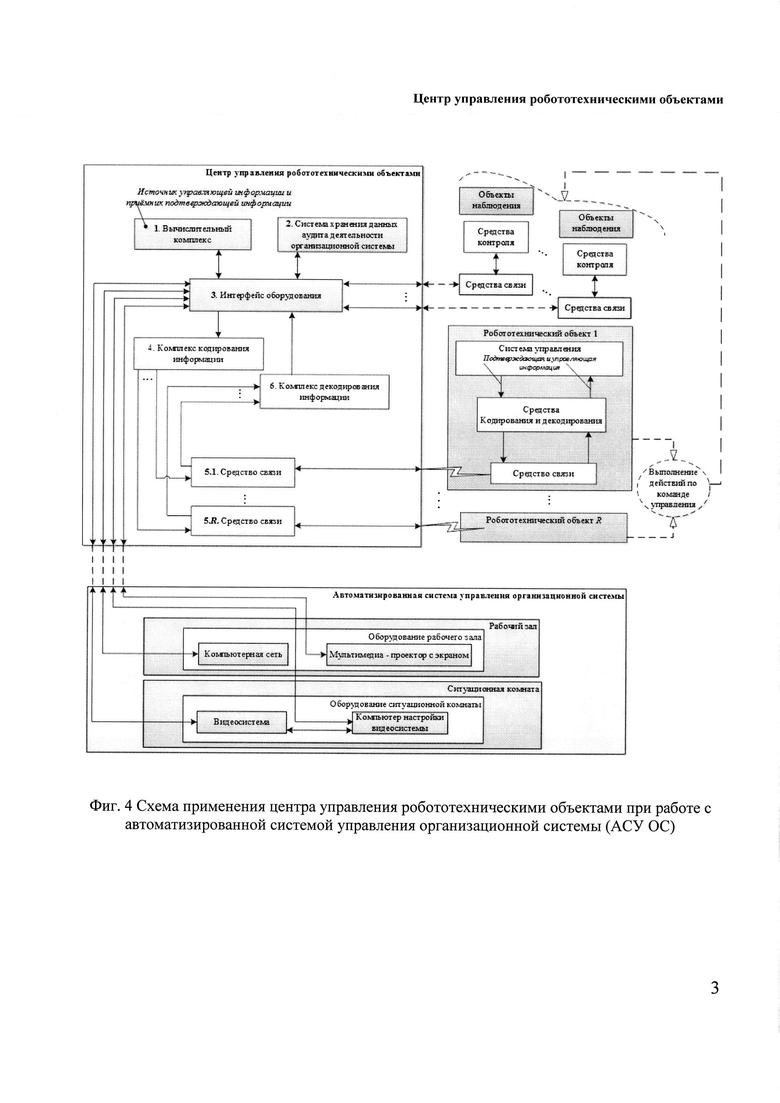
фиг. 4 - схема применения ЦУ РО в составе автоматизированной системы управления организационной системы (АСУ ОС);
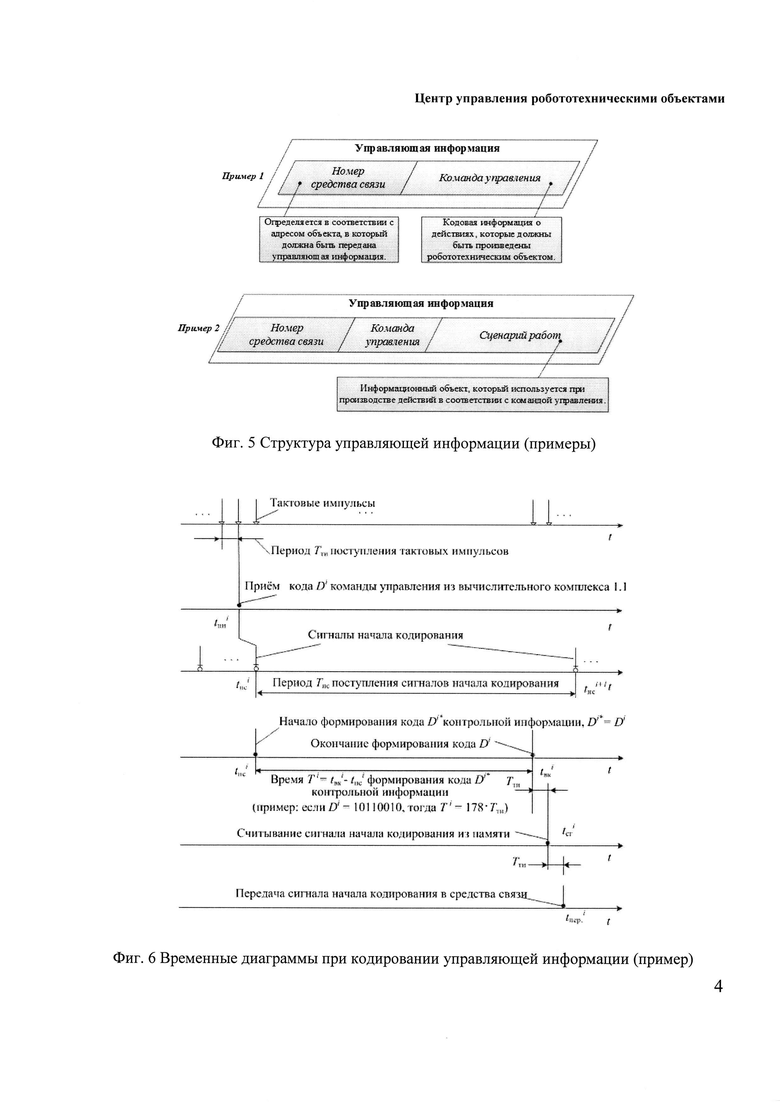
фиг. 5 - структура управляющей информации;
фиг. 6 - диаграммы при кодировании управляющей информации;
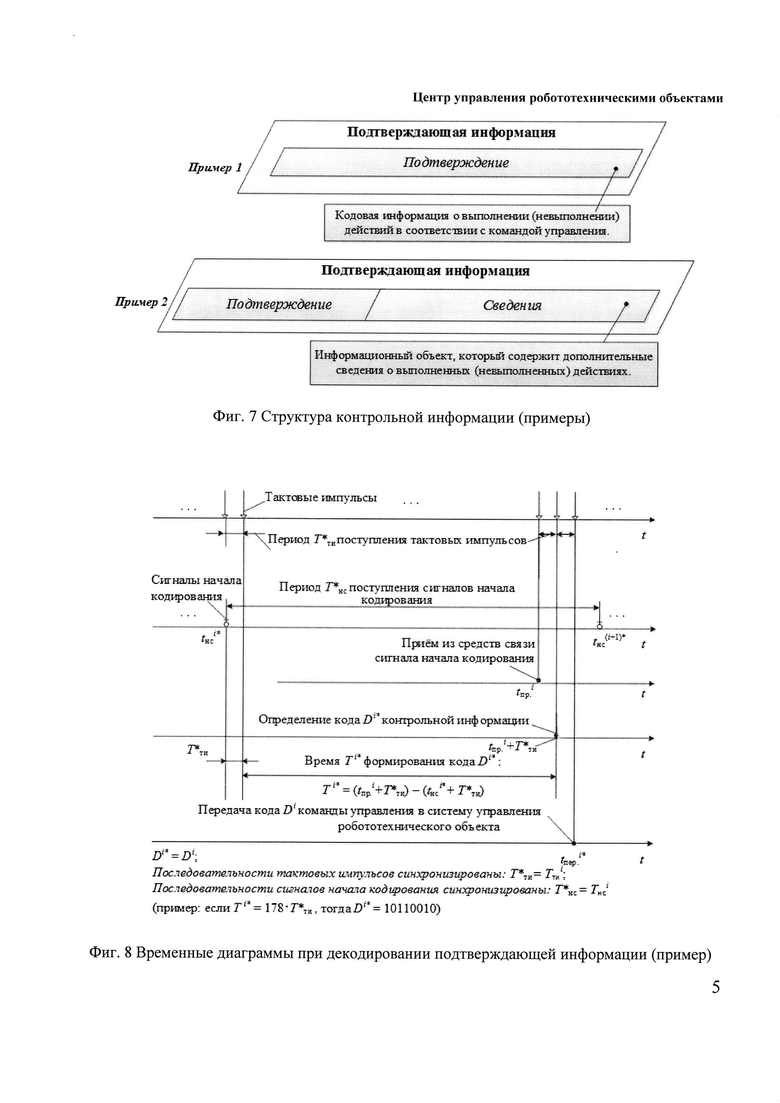
фиг. 7 - структура подтверждающей информации;
фиг. 8 - диаграммы при декодировании подтверждающей информации.
Техническое решение - центр управления робототехническими объектами (фиг. 1) содержит вычислительный комплекс 1, систему 2 хранения данных аудита деятельности организационной системы, интерфейс 3 оборудования, комплекс 4 кодирования информации, средства 5.1 - 5.R связи с робототехническими объектами и комплекс 6 декодирования информации. При этом информационные вход и выход, вход и выход памяти, канальные входы и выходы, вход и выход кодирования, входы и выходы взаимодействия интерфейса оборудования соединены соответственно с выходом и входом вычислительного комплекса, выходом и входом системы хранения данных аудита деятельности организационной системы, объектовыми входами и выходами (в сторону объектов наблюдения), информационным выходом комплекса декодирования информации и информационным входом комплекса кодирования информации, входами и выходами взаимодействия ЦУ РО. Канальные выходы комплекса 4 кодирования информации соединены каждый с информационным входом одного из средств 5.1 - 5.R связи. Канальные входы комплекса 6 декодирования информации соединены каждый с информационным выходом одного из средств 5.1 - 5.R связи, канальные входы и выходы которых соединены соответственно с входами и выходами радиосвязи ЦУ РО.
Комплекс 4 кодирования информации (фиг. 2) содержит модуль 4.1 анализа управляющей информации, модуль 4.2 кодирования данных, модуль 4.3 сжатия информации, внутреннюю шину 4.4. При этом входы внутренней шины 4.4 соединены каждый с внутренним выходом одного из модулей 4.1, 4.2, 4.3. Выходы внутренней шины 4.4 соединены соответственно с внутренними входами модулей 4.1, 4.2, 4.3 и с канальными выходами комплекса 4 кодирования информации, информационный вход которого соединен с информационным входом модуля 4.1 анализа управляющей информации.
Комплекс 6 декодирования информации (фиг. 3) содержит модуль 6.1 анализа подтверждающей информации, модуль 6.2 декодирования данных, модуль 6.3 извлечения информации, внутреннюю шину 6.4 и маршрутизатор 6.5. При этом входы и выходы внутренней шины 6.4 соединены соответственно с внутренними выходами и входами модулей 6.1, 6.2, 6.3 и 6.5. Входы комплекса 6 декодирования информации соединены каждый с одним из канальных входов маршрутизатора 6.5, первый канальный выход которого соединен с канальным входом модуля 6.2 декодирования данных, а второй канальный выход соединен с канальным входом модуля 6.3 извлечения информации. Выход комплекса 6 декодирования информации соединен с информационным выходом модуля 6.1 анализа подтверждающей информации.
Средства 5.1 - 5.R связи (фиг. 1) предназначены для передачи управляющей информации в робототехнические объекты и для приема из них подтверждающей информации.
ЦУ РО работает следующим образом (фиг. 1 и фиг. 4):
1. В системе 2 хранения данных аудита деятельности организационной системы формируют и запоминают:
- блоки данных о робототехнических объектах, причем каждый из блоков содержит данные об адресе одного из объектов - r-го объекта, данные о номере 5.r средства связи из группы средств 5.1÷5.R связи, которое предназначено для передачи управляющей информации в r-й объект, где r=1, 2, …, R, данные о допустимом времени Trдоп. передачи управляющей информации с помощью r-го средства связи, обусловленном, например, нормированным показателем своевременности управления r-м объектом, данные о нормированной скорости Vr передачи данных в r-й объект с помощью r-го средства связи;
- данные, необходимые для формирования управляющей информации, в том числе данные об априорно разработанных и ретроспективных командах управления и сценариях работ, об объектах наблюдения, о робототехнических объектах и о действиях, которые могут быть выполнены над объектами наблюдения и другими сущностями, например, в решении [3] приведен перечень этих данных.
2. В комплексе 4 кодирования информации:
- формируют и запоминают в модуле 4.1 анализа управляющей информации состояние S активности, равное единице

при этом состоянии над данными об управляющей информации, которые поступают из вычислительного комплекса 1, должны быть выполнены операции кодирования и сжатия в модуле 4.3 сжатия информации;
- формируют и запоминают в модуле 4.1 анализа управляющей информации служебную команду, предназначенную для установления состояния S активности, равное нулю

при этом состоянии над данными об управляющей информации, которые поступают из вычислительного комплекса 1, должны быть выполнены операции кодирования, но без сжатия в модуле 4.2 кодирования данных; код данных о служебной команде определяют из условия его несовпадения с кодом данных о любой из возможных команд управления в составе управляющей информации;
- формируют, запоминают в модуле 4.3 сжатия информации и используют при работе данные о длительности Тнс периода поступления сигналов начала кодирования (фиг. 6), причем Тнс определяется из условия непревышения допустимого времени Trдоп. передачи управляющей информации с помощью любого средства связи из группы средств 5.1÷5.R:

3. В комплексе 6 декодирования информации:
В модуле 6.1 анализа подтверждающей информации:
- формируют и запоминают состояние SД активности, равное единице

при этом состоянии из единичного сигнала, поступающего в маршрутизатор 6.5 и далее в модуль 6.3 извлечения информации, должна быть извлечена управляющая информация;
- формируют и запоминают служебную команду, предназначенную для установления состояния SД активности, при котором поступающая в маршрутизатор 6.5 управляющая информация в виде кодированных данных должна быть подвержена декодированию в модуле 6.2, например, состояния:

при этом служебная команда тождественна по кодам аналогичной служебной команде в модуле 4.1 анализа управляющей информации комплекса 4 кодирования информации.
В модуле 6.3 извлечения информации формируют и запоминают данные о длительности Тнс периода поступления сигналов начала сеанса (фиг. 8); длительность Тнс определяется из условия непревышения любого допустимого времени Trдоп. передачи управляющей информации через r-й канальный вход:

при этом данный период равен периоду поступления сигналов начала кодирования в комплексе 4 кодирования информации (3).
В маршрутизаторе 6.5 настраивают исходное состояние, при котором образуются внутренние тракты передачи сигналов из средств связи на информационный вход модуля 6.3 извлечения информации, что соответствует условию (4).
4. Вычислительный комплекс 1 выполняет следующие действия:
- осуществляет сбор данных контроля о состоянии объектов наблюдения в организационной системе и/или во внешней среде;
- передает эти данные в систему 2 хранения данных аудита деятельности организационной системы для запоминания и через выходы взаимодействия ЦУ РО передает их в АСУ ОС для отображения на экранах компьютеров, и/или проектора, и/или видеосистемы;
- формирует на основании данных контроля и на основании данных, хранящихся в системе 2, данные об управляющей информации (фиг. 5) - о команде управления и о сценарии работ, при этом в состав последних включают данные о номере средства связи, например о номере 5.r средства связи, данные о допустимом времени Trдоп. передачи и данные о нормированной скорости Vr передачи; эти данные выбираются из системы 2 из блока данных об адресе r-го объекта (робототехнического объекта), в систему управления которого требуется передать управляющую информацию в соответствии со сценарием работ;
- передает данные об управляющей информации в комплекс 4 кодирования информации.
5. Интерфейс 3 оборудования обеспечивает информационное взаимодействие между составными частями ЦУ РО и между составными частями ЦУ РО и внешними по отношении к нему АСУ ОС и средствами контроля над объектами наблюдения.
6. Комплекс 4 кодирования информации (фиг. 2) выполняет следующие действия.
Модуль 4.1 анализа управляющей информации:
- принимает с информационного входа данные об управляющей информации и запоминает;
- определяет объем В управляющей информации - число бит двоичных данных о команде управления (В1) и о сценарии работ (В2), но без учета числа бит в данных о номере средства связи, о допустимом времени Trдоп. передачи, о нормированной скорости Vr передачи:

или 
если в управляющей информации отсутствует сценарий работ;
- определяет ожидаемое время Trож. передачи сигнала об управляющей информации в r-й объект для состояния S=one (1), например, как отношение числа 2 в степени В к нормированной скорости Vr передачи данных с помощью средства 5.r связи, причем это ожидаемое максимальное время:

- если ожидаемое время Trож. передачи сигнала об управляющей информации не больше допустимого времени Trдоп. передачи данных

то передает данные об управляющей информации, исключая из них данные о допустимом времени Trдоп. передачи и о нормированной скорости Vr передачи, в модуль 4.3 сжатия информации;
- если ожидаемое время Trож. передачи сигнала об управляющей информации больше допустимого времени Trдоп. передачи данных

то выполняет следующие действия:
- копирует данные о служебной команде и передает их и данные о номере средства 5.r связи в модуль 4.3 сжатия информации для выполнения действий по передаче сигнала о служебной команде на приемную сторону.
Модуль 4.3 сжатия информации при выполнении условия (10) принимает из модуля 4.1 данные об управляющей информации, запоминает их и выполняет следующие действия:
- производит кодирование данных об управляющей информации, исключая данные о номере средства 5.r связи, путем определения интервала времени - периода ТТИ тактовых импульсов в периоде Тнс поступления сигналов начала кодирования (фиг. 6), в котором должен быть передан единый сигнал в средство 5.r связи;
- передает единый сигнал после временной задержки, определяемой комбинацией бит данных об управляющей информации, в соответствующем периоде ТТИ тактовых импульсов в средство 5.r связи и далее на соответствующий ему канальный выход, тем самым производя сжатие управляющей информации в едином сигнале.
При этом единый сигнал обеспечивает на приемной стороне возможность создания в робототехническом объекте копии данных о соответствующей этому сигналу управляющей информации - команде управления или команде управления и сценарии работ по этой команде (фиг. 5).
Модуль 4.3 сжатия информации при выполнении условия (11) принимает из модуля 4.1 данные о служебной команде и данные о номере 5.r средства связи, запоминает их и выполняет следующие действия:
- производит кодирование данных о служебной команде, исключая данные о номере 5.r средства связи, путем определения интервала времени - периода ТТИ тактовых импульсов в периоде Тнс поступления сигналов начала кодирования (фиг. 4), в котором должен быть передан единый сигнал в средство 5.r связи;
- передает этот сигнал после временной задержки, определяемой комбинацией бит в данных о служебной команде, в соответствующем периоде ТТИ тактовых импульсов в средство 5.r связи и далее на соответствующий ему канальный выход, тем самым производя сжатие служебной команды в едином сигнале, при этом данный сигнал обеспечивает на приемной стороне возможность создания в робототехническом объекте копии данных о соответствующей этому сигналу служебной команде;
- передает сообщение в модуль 4.1 анализа управляющей информации об исполнении приведенных выше действий.
Модуль 4.1 анализа управляющей информации по получении из модуля 4.3 сообщения об исполнении назначенных ему действий передает в модуль 4.2 кодирования данных управляющую информацию (фиг. 5), исключая из них данные о допустимом времени Trдоп. передачи и о нормированной скорости Vr передачи.
Модуль 4.2 кодирования данных принимает из модуля 4.1 данные об управляющей информации, запоминает их и выполняет следующие действия:
- производит кодирование данных об управляющей информации (фиг. 5), используя одну из известных технологий кодирования с коррекцией ошибок [4] или более сложную, например, [5, 6];
- передает кодированные данные об управляющей информации в средство 5.r связи и далее в r-й робототехнический объект, где эти данные будут декодированы и переданы в систему управления этого объекта, причем средство 5.r связи ко времени передачи уже будет свободно после передачи сигнала о служебной команде.
При этом:
- обмен данными между модулями 4.1, 4.2, 4.3 и канальными выходами осуществляется с помощью внутренней шины 4.4;
- исходная настройка модулей 4.1, 4.2, 4.3 осуществляется с помощью рабочей станции администратора, соединяемой на время настройки через внутреннюю шину 4.4 с внутренними входами/выходами модулей 4.1, 4.2, 4.3;
- модули 4.1, 4.2, 4.3 могут быть выполнены на основе известных вычислительных средств, путем программного (по записанной или по замонтированной программе) исполнения приведенных в описании операций, например, на базе микро-ЭВМ, в частности:
- модуль 4.2 кодирования данных может быть реализован в виде микро-ЭВМ с компьютерными алгоритмами, выполняющими операции в соответствии с известным решением [4], или [5], или [6], или другим, в части действий по кодированию информации;
- модуль 4.3 сжатия информации может быть реализован в виде микро-ЭВМ с компьютерными алгоритмами, выполняющими операции по кодированию данных об информации и последующему их сжатию в соответствии с решением [3], на фиг. 6 приведены временные диаграммы, поясняющие работу модуля 4.3 при сжатии информации в единый сигнал;
- число модулей сжатия информации может быть увеличено до числа, равного числу канальных выходов, или может быть определено с помощью аппарата теории массового обслуживания;
- аналогично, число модулей кодирования данных может быть увеличено до числа, равного числу канальных выходов, или может быть определено с помощью аппарата теории массового обслуживания;
- внутренняя шина 4.4 может быть реализована как интерфейс типа «общая шина».
- средства связи оснащены интерфейсами для взаимодействия с внутренней шиной 4.4.
7. Каждый из робототехнических объектов (фиг. 4) содержит средства связи, средства кодирования и декодирования, систему управления, при этом:
- обеспечивается информационное взаимодействие системы управления объекта с вычислительным комплексом ЦУ РО;
- используются единые для ЦУ РО и объекта алгоритмы кодирования, декодирования информации и передачи, приема сигналов и данных, служебной команды;
- используются единые для ЦУ РО и объекта ограничительные условия в отношении времени передачи управляющей и подтверждающей информации (10) и (11);
- действия по извлечению из (преобразование) единого сигнала управляющей информации и действия по декодированию данных об управляющей информации производятся в соответствии с действиями, выполняемыми комплексом 6 декодирования информации в ЦУ РО в отношении извлечения из (преобразование) единого сигнала подтверждающей информации и декодирования данных о подтверждающей информации. Эти действия описаны ниже.
8. Система управления робототехнического объекта по получению управляющей информации из ЦУ РО запоминает ее и далее:
- выполняет действия в соответствии с поступившей командой управления, используя или сценарий решения, данные о котором занесены в ее память ранее (фиг. 5, пример 1), или сценарий, данные о котором поступили в составе принятой управляющей информации (фиг. 5, пример 2);
- формирует подтверждающую информацию о выполнении (невыполнении) команды управления (фиг. 7) и передает ее в комплекс кодирования информации робототехнического объекта, который выполняет действия над подтверждающей информацией, аналогичные действиям, описанным выше, которые выполняют модули 4.1÷4.3 комплекса 4 кодирования информации, входящего в состав ЦУ РО.
9. В результате этих действий через средство связи робототехнического объекта, канал связи и средство связи ЦУ РО в модуль 6 декодирования информации поступает либо единый сигнал о подтверждающей информации, либо кодированные данные о подтверждающей информации (перед передачей которой использовался алгоритм с передачей служебной команды об изменении состояния активности).
10. Комплекс 6 декодирования информации выполняет следующие действия при условии непревышения ожидаемым временем Trож._подтв. передачи сигнала о подтверждающей информации допустимого времени Trдоп. передачи данных через средство 5.r связи

- модуль 6.3 извлечения информации (фиг. 3) принимает из средства 5.r связи через канальный вход комплекса 6 и маршрутизатор 6.5 сигнал о подтверждающей информации, преобразует его в данные о подтверждающей информации и передает их через внутреннюю шину 6.4 и модуль 6.1 анализа подтверждающей информации на информационный выход комплекса 6 и далее через интерфейс 3 оборудования в вычислительный комплекс 1 ЦУ РО (фиг. 1).
- модуль 6.1 анализа подтверждающей информации пропуская через себя данные о подтверждающей информации не изменяет исходного состояния SД=one (4).
9. Комплекс 6 кодирования информации выполняет следующие действия при условии превышения ожидаемым временем Trож._подтв. передачи сигнала о подтверждающей информации допустимого времени Trдоп. передачи данных через средство 5.r связи

- модуль 6.3 извлечения информации принимает из средства 5.r связи через канальный вход комплекса 6 и маршрутизатор 6.5 сигнал о служебной команде, преобразует его в данные о служебной команде и передает их через внутреннюю шину 6.4 в модуль 6.1 анализа подтверждающей информации;
- модуль 6.1 анализа подтверждающей информации устанавливает состояние SД=zero (5), при этом переводит маршрутизатор 6.5 в состояние, при котором кодированные данные о подтверждающей информации, поступающие следом за сигналом о служебной команде на канальный вход комплекса 6 из средства 5.r связи, передаются через маршрутизатор 6.5 в модуль 6.2 декодирования данных, причем управление маршрутизатором в этом случае осуществляется модулем 6.1 через внутреннюю шину 6.4;
- модуль 6.2 декодирования данных принимает кодированные данные о подтверждающей информации, поступающие с канального входа комплекса 6 из средства 5.r связи, декодирует их и передает данные о подтверждающей информации через внутреннюю шину 6.4 и модуль 6.1 на информационный выход комплекса 6 и далее через интерфейс 3 оборудования в вычислительный комплекс 1 ЦУ РО;
- модуль 6.1 анализа подтверждающей информации, пропуская через себя данные о подтверждающей информации, изменяет состояние SД=zero (5) на исходное SД=one (4).
При этом:
- обмен данными между модулями 6.1, 6.2, 6.3, 6.5 осуществляется с помощью внутренней шины 6.4;
- настройка модулей 6.1, 6.2, 6.3, 6.5 осуществляется с помощью рабочей станции администратора, соединяемой на время настройки через внутреннюю шину 6.4 с внутренними входами/выходами модулей 6.1, 6.2, 6.3, 6.5;
- модули 6.1, 6.2, 6.3, 6.5 могут быть выполнены на основе известных вычислительных средств, путем программного (по записанной или по замонтированной программе) исполнения приведенных в описании операций, например, на базе микро-ЭВМ;
- модуль 6.2 декодирования данных может быть реализован в виде микро-ЭВМ с компьютерными алгоритмами, выполняющими операции в соответствии с известным решением [4], или [5], или [6], или другим, в части действий по декодированию информации;
- модуль 6.3 извлечения информации может быть реализован в виде микро-ЭВМ с компьютерными алгоритмами, выполняющими операции по извлечению информации из единичного сигнала в соответствии с решением [3], на фиг. 8 приведены временные диаграммы, поясняющие работу модуля 6.3 по извлечению информации из единичного сигнала;
- маршрутизатор 6.5 может быть реализован в виде микро-ЭВМ с компьютерными алгоритмами, выполняющими операции по переключению трактов передачи в соответствии с известным решением [7];
- внутренняя шина 6.4 может быть реализована как интерфейс типа «общая шина».
Положительный эффект от применения ЦУ РО заключается в максимально-возможной скрытности передачи управляющей и подтверждающей информации в условиях ограничений на время передачи и в минимально-возможном времени передачи данных при заданном алгоритме кодирования данных. Так, данное решение, по сравнению с решением [3], при выполнении условий (11) и (13) обеспечивает сокращение времени передачи данных. Например, при передаче управляющей информации в r-й объект степень K сокращения времени составит:

где
- в числителе - время передачи для устройства [3],
- в знаменателе - время передачи для данного решения, включая время передачи служебной команды (2B1/Vr), при этом число бит в служебной команде равно числу бит (В1) в команде управления.
Указанный эффект, в свою очередь, обеспечивает повышение оперативности управления робототехническими объектами за счет исключения или сведения к минимуму случаев передачи управляющей информации за время, превышающее нормированное время.
Источники
[1] RU 80050 U1, G09B 9/00 (2006.01), опубл. 20.01.2009 г., бюл. 2.
[2] RU 127493 U1, G05B 19/00 (2006.01), опубл. 27.04.2013 г., бюл. 12.
[3] RU 140887 U1, G05B 19/00, опубл. 20.05.2014 г., бюл. 14.
Дополнительные источники
[4] RU 2498517 C2, H04L 27/2, опубл. 10.11.2013 г., бюл. 31.
[5] Морелос-Сарагоса Р. Искусство помехоустойчивого кодирования. Методы, алгоритмы, применение / пер. с англ. В.Б. Афанасьева. - М.: Техносфера, 2006. - 320 с.
[6] RU 2224358 C2, Н03М 13/27, опубл. 20.02.2004, бюл. 5.
[7] SU 1481905 A1, Н04В 3/46, опубл. 23.05.89, бюл. №19.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2016 |
|
RU2638732C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДЕЯТЕЛЬНОСТЬЮ ОРГАНИЗАЦИОННЫХ СИСТЕМ | 2015 |
|
RU2595335C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2015 |
|
RU2618366C1 |
| СИСТЕМА СИТУАЦИОННО-АНАЛИТИЧЕСКИХ ЦЕНТРОВ ОРГАНИЗАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2533090C2 |
| СПОСОБ СКРЫТОЙ ЗАЩИЩЕННОЙ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКИХ ДАННЫХ В РОБОТОТЕХНИЧЕСКИХ КОМПЛЕКСАХ | 2020 |
|
RU2765811C1 |
| ПРИЕМНИК ДИСКРЕТНОЙ ИНФОРМАЦИИ С АВТОМАТИЧЕСКИМ СОГЛАСОВАНИЕМ СКОРОСТЕЙ ПЕРЕДАЧИ И ПРИЕМА | 2003 |
|
RU2249919C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2516686C2 |
| СПОСОБ ОРГАНИЗАЦИИ БЕСПРОВОДНОГО КАНАЛА УПРАВЛЕНИЯ МОБИЛЬНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ И СИСТЕМА СВЯЗИ И ПЕРЕДАЧИ ДАННЫХ | 2014 |
|
RU2547633C1 |
| СПОСОБ ПОДДЕРЖКИ ПРОЦЕССОВ ОРГАНИЗАЦИОННОЙ СИСТЕМЫ | 2019 |
|
RU2725779C1 |
| УСТРОЙСТВО ЗАЩИТЫ ОТ ОШИБОК | 1998 |
|
RU2127943C1 |

Центр управления робототехническими объектами характеризуется тем, что содержит вычислительный комплекс, систему хранения данных аудита деятельности организационной системы, интерфейс оборудования, комплексы кодирования и декодирования информации и средства связи с робототехническими объектами. Техническое решение обеспечивает высокий уровень скрытности команд управления при передаче их в удаленные робототехнические объекты и подтверждений об их исполнении с учетом заданных ограничений на время передачи управляющей и подтверждающей информации. Положительный эффект от применения данного решения заключается в максимально-возможной скрытности передачи управляющей и подтверждающей информации в условиях ограничений на время передачи и в минимально-возможном времени передачи данных при заданном алгоритме кодирования данных. Это обеспечивает повышение оперативности управления робототехническими объектами за счет исключения или сведения к минимуму сеансов передачи информации за время, превышающее нормированное время. 8 ил.
Центр управления робототехническими объектами, содержащий вычислительный комплекс, систему хранения данных аудита деятельности организационной системы, интерфейс оборудования, комплекс кодирования информации и средства связи, причем информационные вход и выход, вход и выход памяти, канальные входы и выходы, выход кодирования, входы и выходы взаимодействия интерфейса оборудования соединены соответственно с выходом и входом вычислительного комплекса, выходом и входом системы хранения данных аудита деятельности организационной системы, объектовыми входами и выходами центра, информационным входом комплекса кодирования информации, входами и выходами взаимодействия центра, канальные выходы комплекса кодирования информации соединены каждый с информационным входом одного из средств связи, канальные входы и выходы средств связи соединены соответственно с входами и выходами радиосвязи центра, отличающийся тем, что содержит комплекс декодирования информации, канальные входы которого соединены каждый с информационным выходом одного из средств связи, а информационный выход соединен с входом кодирования интерфейса оборудования, причем комплекс декодирования информации содержит модуль анализа подтверждающей информации, модуль декодирования данных, модуль извлечения информации, маршрутизатор и внутреннюю шину, входы и выходы которой соединены соответственно с внутренними выходами и входами модулей анализа подтверждающей информации, декодирования данных, извлечения информации и маршрутизатора, входы комплекса декодирования информации соединены соответственно с канальными входами маршрутизатора, первый канальный выход которого соединен с канальным входом модуля декодирования данных, а второй канальный выход соединен с канальным входом модуля извлечения информации, информационный выход комплекса декодирования информации соединен с информационным выходом модуля анализа подтверждающей информации, при этом комплекс кодирования информации содержит модуль анализа управляющей информации, модуль кодирования данных, модуль сжатия информации и внутреннюю шину, входы которой соединены соответственно с внутренними выходами модулей анализа управляющей информации, кодирования данных и сжатия информации, а выходы которой соединены соответственно с внутренними входами этих модулей и с канальными выходами комплекса кодирования информации, информационный вход которого соединен с информационным входом модуля анализа данных.
| Устройство для регулирования высокоскоростных асинхронных двигателей | 1961 |
|
SU140887A1 |
| СПОСОБ КОДИРОВАНИЯ УПРАВЛЯЮЩЕЙ ИНФОРМАЦИИ В СИСТЕМЕ СВЯЗИ, А ТАКЖЕ СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА УПРАВЛЯЮЩЕЙ ИНФОРМАЦИИ | 2010 |
|
RU2498517C2 |
| 0 |
|
SU160257A1 | |
| CN 101621695 B, 05.06.2013. | |||

