ОБЛАСТЬ ТЕХНИКИ
[0001] Данное изобретение относится, главным образом, к устройствам управления технологическим процессом и, конкретнее, к способам и устройствам для использования данных о вибрациях для определения состояния устройства управления технологическим процессом.
УРОВЕНЬ ТЕХНИКИ
[0002] Системы управления технологическим процессом, главным образом, используют ряд устройств управления технологическим процессом для управления процессом. Вибрации в элементах в этих устройствах управления технологическим процессом свойственны процессу работы. Со временем элементы, входящие в эти устройства управления технологическим процессом, подвергаются напряжениям, которые вызывают изменения в вибрационных характеристиках, связанных с элементами. Эти напряжения могут уменьшать эксплуатационные качества устройств управления технологическим процессом и уменьшать оставшийся ресурс элементов и, таким образом, устройств управления технологическим процессом. Поскольку эти напряжения могут воздействовать на устройство управления технологическим процессом в разной степени, ресурс устройства управления технологическим процессом также изменяется.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Приведенный в качестве примера способ включает в себя сбор первых данных о вибрациях от первого датчика, функционально связанного с устройством управления технологическим процессом, во время калибровки. Указанный способ, кроме того, включает в себя расчет эксплуатационного порога устройства управления технологическим процессом на основании первых данных о вибрациях и определение состояния устройства управления технологическим процессом, если вторые данные о вибрациях, связанные с устройством управления технологическим процессом, полученные после калибровки, превышают эксплуатационный порог.
[0004] Другой приведенный в качестве примера способа включает в себя сбор первых данных о вибрациях от первого датчика, функционально связанного с устройством управления технологическим процессом, и вторых данных о вибрациях от второго датчика, функционально связанного с трубой, соединенной с устройством управления технологическим процессом. Указанный способ, кроме того, включает в себя расчет отношения на основании первых данных о вибрациях и вторых данных о вибрациях и показание состояния устройства управления технологическим процессом, если отношение больше, чем пороговое значение.
[0005] Другой приведенный в качестве примера способ включает в себя сбор данных о вибрациях от первого датчика, функционально связанного с устройством управления технологическим процессом. Указанный способ, кроме того, включает в себя прием диагностических данных о вибрациях, связанных с устройством управления технологическим процессом. Указанный способ, кроме того, включает в себя сравнение данных о вибрациях с диагностическими данными о вибрациях и показание состояния устройства управления технологическим процессом на основания сравнения.
[0006] Другой приведенный в качестве примера способа включает в себя сбор первых данных о вибрациях от первого датчика, функционально связанного с устройством управления технологическим процессом. Указанный способ, кроме того, включает в себя определение характеристики устройства управления технологическим процессом по первым данным о вибрациях. Указанный способ, кроме того, включает в себя определение того, находится ли характеристика в известном диапазоне, и, когда характеристика находится в пределах известного диапазона, показание состояния устройства управления технологическим процессом.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007] Фиг. 1 иллюстрирует пример системы управления технологическим процессом, в которой могут быть реализованы принципы настоящего изобретения.
[0008] Фиг. 2 иллюстрирует пример устройства управления технологическим процессом, которое может использоваться для реализации способов, раскрываемых в настоящем документе.
[0009] Фиг. 3 иллюстрирует альтернативный пример соединителя штока, показанного на фиг. 2.
[0010] На фиг. 4 приведена блок-схема, представляющая пример способа, раскрываемого в настоящем документе.
[0011] На фиг. 5 приведена блок-схема, представляющая другой пример способа, раскрываемого в настоящем документе.
[0012] На фиг. 6 приведена блок-схема, представляющая другой пример способа, раскрываемого в настоящем документе.
[0013] На фиг. 7 приведена блок-схема, представляющая другой пример способа, раскрываемого в настоящем документе.
ПОДРОБНОЕ ОПИСАНИЕ
[0014] Определенные примеры показаны на вышеуказанных чертежах и описаны подробно ниже. В описанных примерах одинаковые или идентичные ссылочные номера используются для указания тех же самых или аналогичных элементов. Чертежи не обязательно выполнены в масштабе, и определенные особенности и определенные виды чертежей могут быть показаны увеличенными в масштабе или схематическими для ясности и/или краткости. Кроме того, в настоящем описании раскрыты несколько примеров. Какие-либо признаки из любого примера могут быть включены, заменены или иным способом объединены с другими признаками из других примеров.
[0015] В то время как следующие способы и устройства описаны в сочетании с узлом регулирующего клапана, пример способов и устройств может также использоваться с любым другим устройством управления технологическим процессом. Процессы, такие как, например, промышленные процессы, обычно регулируются с помощью ряда устройств управления технологическим процессом. Такие устройства управления технологическим процессом могут включать приводные механизмы и линейные клапаны. Со временем может развиваться повреждение конструкции или износ одного или большего количества устройств управления технологическим процессом и приводить к состояниям, таким как, например, неустойчивость управления и/или другое ухудшение характеристик устройств управления технологическим процессом.
[0016] Описанные в настоящем документе примеры относятся к обработке данных о вибрациях, собранных от устройства управления технологическим процессом, и определению состояния устройства на основе данных о вибрациях. Данные о вибрациях могут иметь характеристики, относящиеся к частоте, ускорению, смещению и/или скорости, связанные с элементами устройства управления технологическим процессом, и могут представлять информацию относительно конструктивной или функциональной целостности устройства управления технологическим процессом. Данные о вибрациях, приближающихся к пороговому значению, или изменение, отмеченное в данных о вибрациях, могут указывать на начало выхода из строя, для которого может быть предусмотрено предупреждение для пользователя или другого лица. Например, данные о вибрациях могут указывать на неустойчивость управления за счет настройки системы управления, настройки клапанного управляющего устройства и/или на другие проблемы процесса, связанные с устройством управления технологическим процессом.
[0017] В некоторых примерах данные о вибрациях, полученные от одного или большего количества датчиков вибраций, функционально связанных с устройством управления технологическим процессом, могут быть обработаны, чтобы определить пороговое значение, связанное с состоянием устройства управления технологическим процессом. Например, данные о вибрациях, полученные от датчика, такого как акселерометр, функционально связанного с элементом устройства управления технологическим процессом, могут быть собраны во время калибровки и использованы для расчета эксплуатационного порога устройства управления технологическим процессом. Как вариант, эксплуатационный порог может быть известным порогом, как, например, промышленный стандарт или принятый предел или порог. Данные о вибрациях, полученные от датчика после калибровки, можно сравнивать с эксплуатационным порогом, и при превышении эксплуатационного порога можно определить состояние устройства управления технологическим процессом.
[0018] В других примерах данные о вибрациях получают от дополнительного датчика, функционально связанного с трубой, которая соединена с устройством управления технологическим процессом. В таких примерах данные о вибрациях, полученные от датчика, функционально связанного с устройством управления технологическим процессом, и данные о вибрациях, полученные от датчика, функционально связанного с трубой, могут использоваться для вычисления коэффициента. Этот коэффициент может сравниваться с пороговым значением, и, когда коэффициент превышает пороговое значение, может быть определено состояние устройства управления технологическим процессом. Значение порога может зависеть от местоположения датчика, функционально связанного с устройством управления технологическим процессом.
[0019] В других примерах диагностические данные о вибрациях могут быть использованы для определения состояния устройства управления технологическим процессом. Диагностические данные о вибрациях могут включать эксплуатационный порог, предопределенный порог, пороговое значение и/или диапазон. Когда диагностические данные о вибрациях включают в себя частотный диапазон, определение состояния устройства управления технологическим процессом может быть выполнено на основании сравнения данных о вибрациях, полученных от датчика, функционально связанного с устройством управления технологическим процессом, и диагностических данных о вибрациях.
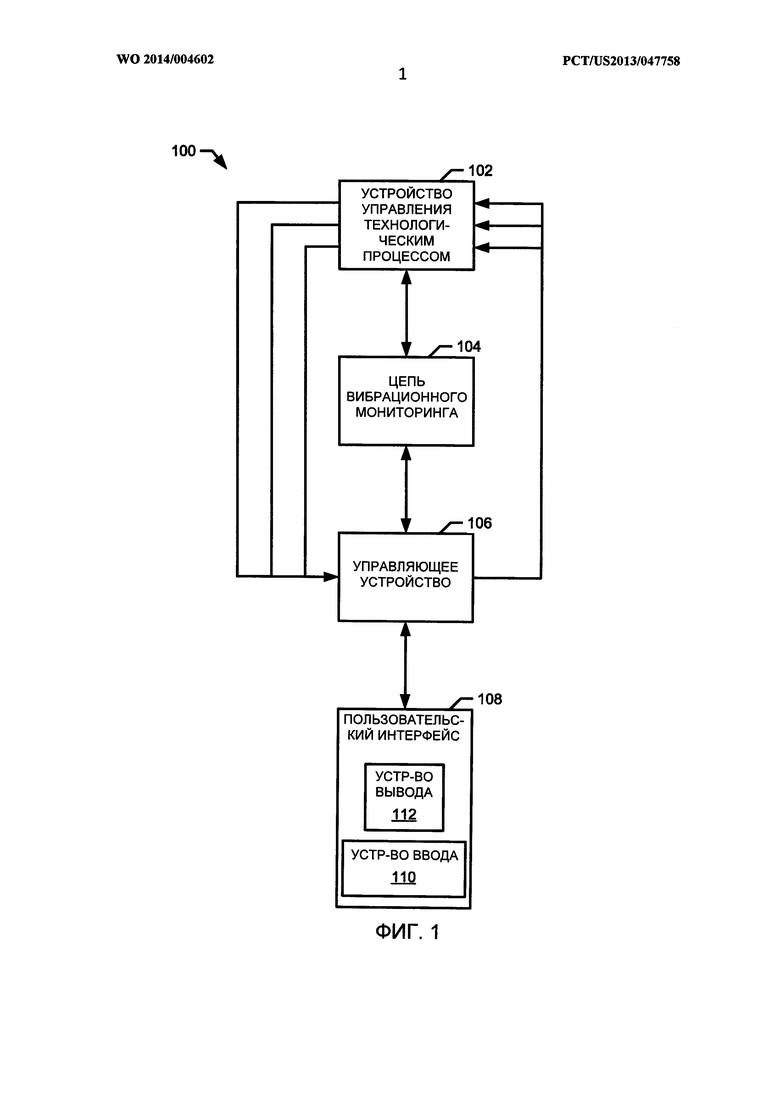
[0020] На фиг. 1 изображен пример системы 100 управления технологическим процессом, которая может использоваться для реализации примеров способов и устройств, раскрываемых в настоящем документе. В иллюстрируемом на фиг. 1 примере устройство 102 управления технологическим процессом, цепь 104 вибрационного мониторинга, управляющее устройство 106 и пользовательский интерфейс 108 могут обмениваться данными с помощью, например, проводных или беспроводных линий связи. В частности, пример устройства 102 управления технологическим процессом и пример управляющего устройства 106 по фиг. 1 могут обмениваться данными через шину данных (например, FOUNDATION Fieldbus™, HART™, Profibus™, Modbus™, Devicenet™ и др.) или локальную сеть (Local Area Network (LAN)).
[0021] Цепь 104 вибрационного мониторинга по фиг. 1 получает данные о вибрациях, передаваемые устройством 102 управления технологическим процессом, и создает предупредительные сообщения для вывода на управляющее устройство 106. Пример цепи 104 вибрационного мониторинга по фиг. 1 и/или пример управляющего устройства 106 по фиг. 1 может быть цифровым устройством позиционирования клапана (digital valve positioner (DVP)), процессором для сбора и/или распознавания данных и/или пакетом программ для управления ресурсами. Как вариант, пример цепи 104 вибрационного мониторинга по фиг. 1 и управляющее устройство 106 могут быть объединены и/или интегрированы, например, в контроллере DeltaV™.
[0022] Приведенное в качестве примера управляющее устройство 106 создает уведомления, предупредительные сообщения и/или информацию, основанную на данных, принятых и/или полученных от устройства 102 управления технологическим процессом и/или цепи 104 вибрационного мониторинга. Приведенное в качестве примера управляющее устройство 106 по фиг. 1 также передает информацию (например, команды) к устройству 102 управления технологическим процессом и/или выводит информацию (например, предупредительные сообщения) на пользовательский интерфейс 108.
[0023] Приведенное в качестве примера устройство 102 управления технологическим процессом по фиг. 102 может быть любым количеством устройств ввода и/или устройств вывода. В некоторых примерах устройства ввода включают в себя клапаны, насосы, вентиляторы, нагреватели, охладители, смесители и/или другие устройства, а устройства вывода включают в себя акселерометры, термометры, датчики давления, датчики концентрации, измерители уровня текучей среды, расходомеры, датчики паров, устройства позиционирования клапанов и/или другие устройства.
[0024] Приведенный в качестве примера пользовательский интерфейс 108 по фиг. 1 представляет собой любое устройство, обрабатывающее входные и выходные данные, такое как, например, компьютер, рабочая станция, сервер и/или мобильное устройство и др. Пользовательские входные данные могут передаваться на пользовательский интерфейс 108 с помощью устройства 110 ввода, такого как, например, клавиатура, сенсорное перо, мышь и/или сенсорный экран и др. Выходные данные от пользовательского интерфейса 108 могут передаваться пользователю с помощью устройства 112 вывода, такого как, например, монитор (например, отображающий предупредительное сообщение) и/или громкоговоритель (например, передающий звуковое предупреждение) и др.
[0025] Хотя на фиг. 1 показан один пример системы 104 вибрационного мониторинга и пример управляющего устройства 106, в пример системы 100 управления технологическим процессом по фиг. 1 может быть включен один или больше дополнительных примеров цепей 104 вибрационного мониторинга и/или управляющих устройств 106 без отклонения от принципов настоящего изобретения.
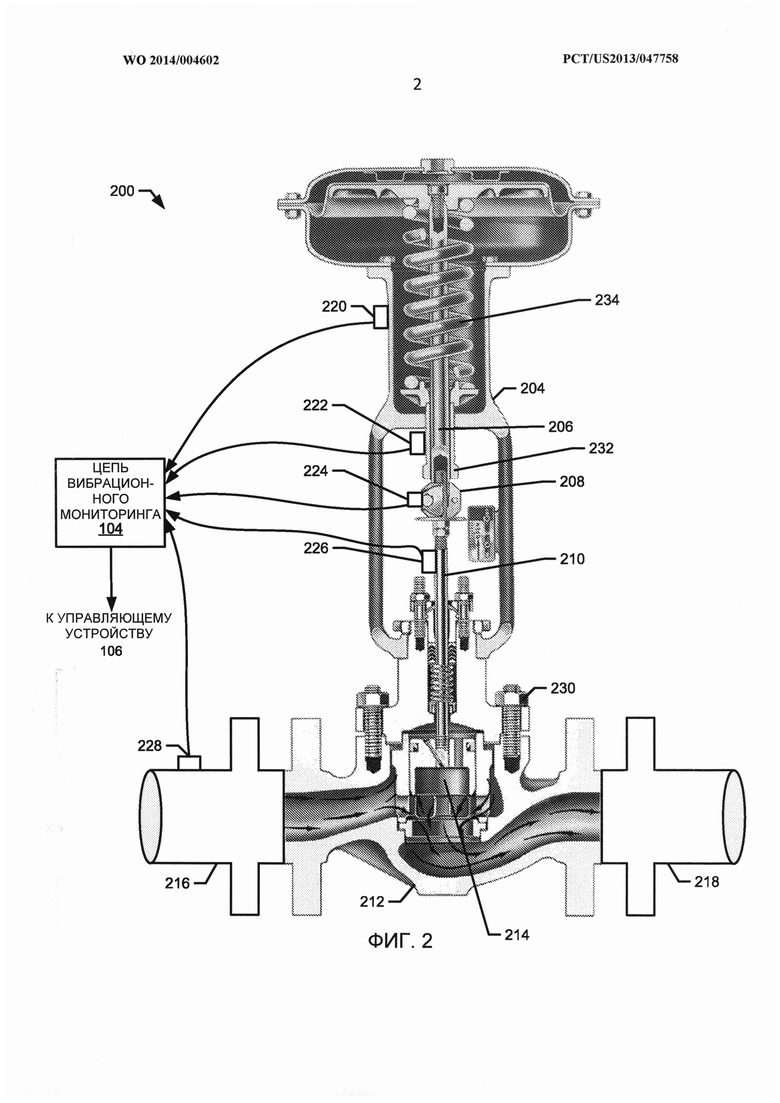
[0026] На фиг. 2 изображен пример устройства 200 управления технологическим процессом, которое может использоваться для реализации примеров способов и устройств, раскрываемых в настоящем документе. Пример устройства 200 управления технологическим процессом, показанного на фиг. 2, представляет собой линейный клапан. Однако для реализации примеров способов и устройств, раскрываемых в настоящем документе, могут также использоваться другие устройства управления технологическим процессом. Пример устройства 200 управления технологическим процессом включает в себя приводной механизм 204, шток 206 приводного механизма, соединитель 208 штока, шток 210 клапана, корпус 212 клапана и плунжер 214 клапана. Пример корпуса 212 клапана по фиг. 2 может также быть соединен с трубой 216 выше по потоку и трубой 218 ниже по потоку. Первый-пятый датчики 220, 222, 224, 226 и 228 соединены с приведенными в качестве примеров приводным механизмом 204, штоком 206 приводного механизма, соединителем 208 штока, штоком 210 клапана и трубой 216 выше по потоку соответственно. В примере по фиг. 2 датчики 220-228 могут содержать один или больше акселерометров и/или других датчиков вибрации и/или движения. Хотя это не показано, один или больше датчиков могут также быть соединены с трубой 218 ниже по потоку. Кроме того, хотя пример устройства 200 управления технологическим процессом включает в себя датчики 220-228, существует возможность использовать меньше датчиков или дополнительные датчики в местоположениях, показанных на фиг. 2, или в одном или большем количестве различных местоположений.
[0027] Механические соединения между элементами примера устройства 200 управления технологическим процессом могут вибрировать во время работы устройства 200 управления технологическим процессом. Эти вибрации могут быть обусловлены рядом источников, таких как работа двигателя или приводного механизма, движение текучей среды через устройство 200 управления технологическим процессом, неплотности одного или большего количества механических соединений и др. В некоторых примерах вибрации или вибрационные характеристики могут указывать на конкретное состояние устройства 200 управления технологическим процессом. Например, данные о вибрациях, полученные от датчика, соединенного со штоком 206 приводного механизма (например, датчика 222 штока приводного механизма), соединителем 208 штока (например, датчиком 224 соединителя штока) или штоком 210 клапана (например, датчик 226 штока клапана), могут включать неплотности, износ или другое ухудшение характеристик соответствующего элемента.
[0028] В иллюстрируемом примере по фиг. 2 данные о вибрациях, полученные с помощью одного или большего количества датчиков 220-228, передаются (например, по проводным или беспроводным линиям связи), к примеру, цепи 104 вибрационного мониторинга. Например, данные о вибрациях, соответствующих приводному механизму 204, измеряются или собираются с помощью датчика 220 корпуса приводного механизма. Данные о вибрациях могут передаваться от датчика 220 корпуса приводного механизма, к примеру, цепи 104 вибрационного мониторинга для дальнейшей обработки.
[0029] Данные о вибрациях, полученные от примеров датчиков 220-228, могут быть использованы примером цепи 104 вибрационного мониторинга для указания состояния устройства 200 управления технологическим процессом. Цепь 104 вибрационного мониторинга определяет характеристики данных о вибрациях, связанных с частотой, ускорением, смещением и/или скоростью, полученных от датчика (датчиков) 220-228, соединенного с соответствующим элементом (элементами) устройства 200 управления технологическим процессом. В некоторых примерах цепь 104 вибрационного мониторинга также определяет источник данных о вибрациях (например, датчик, от которого получены данные). В некоторых примерах цепь 104 вибрационного мониторинга определяет ось перемещения, связанную с данными о вибрациях. Например, данные о вибрациях, полученные от датчика, могут соответствовать смещению элемента устройства 200 управления технологическим процессом вдоль горизонтальной оси и/или вертикальной оси.
[0030] Приведенная в качестве примера цепь 104 вибрационного мониторинга сравнивает распознанную характеристику (характеристики) данных о вибрациях с известной пороговой величиной (величинами) и/или диапазоном (диапазонами). Например, характеристика (характеристики) смещения, скорости и/или ускорения для данных о вибрациях могут сравниваться с известным пороговым значением или множественными пороговыми значениями. Когда данные о вибрациях превышают известное пороговое значение (значения), пример цепи 104 вибрационного мониторинга может определять состояние устройства 200 управления технологическим процессом, такое как ослабление 230 крепления крышки. Дополнительно или альтернативно частотные характеристики данных о вибрации могут сравниваться с пороговым значением и/или с диапазоном или многими диапазонами. Например, неисправный или поврежденный плунжер 214 клапана может быть определен с помощью приведенной в качестве примера цепи 104 вибрационного мониторинга, когда собственная частота колебаний превышает 100 Герц (Гц). Дополнительно или альтернативно приведенная в качестве примера цепь 104 вибрационного мониторинга может определять, например, неустойчивость управления в приведенном в качестве примера устройстве 200 управления технологическим процессом за счет настройки системы управления или настройки клапанного управляющего устройства, когда собственная частота колебаний находится между 1 Гц и 10 Гц.
[0031] Известные пороговые значения и/или диапазоны, используемые приведенной в качестве примера цепью 104 вибрационного мониторинга для сравнения данных о вибрации, могут храниться в локальной памяти приведенной в качестве примера цепи 104 вибрационного мониторинга и/или извлекаться из удаленного запоминающего устройства через проводную или беспроводную линию связи. Известное пороговое значение (значения) и/или диапазон (диапазоны) могут быть основаны на данных, полученных в процессе испытаний продукции в лаборатории, или могут быть установлены промышленными стандартами. Например, лабораторные испытания могут определять характеристику (характеристики) данных о вибрации, связанную с элементом устройства 200 управления технологическим процессом, соответствующую конкретному состоянию устройства 200 управления технологическим процессом. Дополнительно или альтернативно приведенная в качестве примера цепь 104 вибрационного мониторинга может калиброваться во время, например, начального периода настройки. Во время калибровки приведенная в качестве примера цепь 104 вибрационного мониторинга может собирать данные о вибрации от приведенных в качестве примеров датчиков 220-228 в течение периода времени (например, десять минут) и нормализовать данные о вибрации. Нормализованные данные о вибрации могут быть сохранены (например, в локальной памяти) и могут сравниваться с полученными впоследствии данными о вибрации с помощью цепи 104 вибрационного мониторинга для определения состояния устройства 200 управления технологическим процессом.
[0032] В некоторых примерах цепь 104 вибрационного мониторинга сравнивает данные о вибрации, полученные, например, от приведенного в качестве примера датчика 224 соединителя штока, с пороговым значением, соответствующим состоянию, связанному с соединителем 208 штока. Например, когда данные о вибрации, полученные от датчика 224 соединителя штока (например, характеристики, касающиеся частоты), превышают пороговое значение, цепь 104 вибрационного мониторинга может определить состояние, связанное с нарушением конструкционной и/или функциональной целостности устройства 200 управления технологическим процессом. Например, полученные от датчика 224 соединителя штока данные о вибрации, большей, чем 100 Гц, могут указывать на внутреннее повреждение корпуса 212 клапана, такое как нарушенный плунжер 214 клапана или поршневое кольцо в приводном механизме поршня (не показано).
[0033] В некоторых примерах цепь 104 вибрационного мониторинга сравнивает полученные данные о вибрациях с сохраненным диапазоном, соответствующим состоянию, связанному с устройством 200 управления технологическим процессом. Например, когда частота (например, собственная) для данных о вибрациях, полученных, например, от датчика 222 штока приводного механизма, находится между 10 Гц и 100 Гц, цепь 104 вибрационного мониторинга может определить состояние, связанное, например, с неплотностью элемента, обусловленной ухудшением направляющих возвратно-поступательного движения деталей из-за износа направляющей втулки 232 приводного механизма.
[0034] В других примерах цепь 104 вибрационного мониторинга может калиброваться перед использованием данных о вибрациях, полученных от датчиков 220-228, для определения состояния устройства 200 управления технологическим процессом. Например, когда устройство 200 управления технологическим процессом установлено в систему управления технологическим процессом, такую как, например, система 100 управления технологическим процессом по фиг. 1, цепь 104 вибрационного мониторинга собирает данные о вибрациях от датчика (например, приведенные в качестве примера датчики 220-228), функционально связанного с элементом устройства 200 управления технологическим процессом, за период времени. Например, цепь 104 вибрационного мониторинга может собирать данные о вибрациях от приведенного в качестве примера датчика 224 соединителя штока по фиг. 2 в течение периода 24 часов. Собранные данные о вибрациях затем могут быть нормализованы, и с помощью цепи 104 вибрационного мониторинга может быть определена вибрационная характеристика (например, собственная частота) приведенного в качестве примера соединителя 208 штока во время работы (например, эксплуатационный порог и/или диапазон). Например, рассчитывается нормальное распределение полученных данных о вибрациях.
[0035] После калибровки цепь 104 вибрационного мониторинга контролирует данные о вибрациях, полученные от приведенного в качестве примера датчика 224 соединителя штока. Если данные о вибрациях, полученные с помощью цепи 104 вибрационного мониторинга, отклоняются от нормализованной вибрационной характеристики, определенной во время калибровки (например, эксплуатационного порога и/или диапазона), приведенная в качестве примера цепь 104 вибрационного мониторинга определяет состояние устройства 200 управления технологическим процессом, такое как ослабление соединителя 208 штока.
[0036] В других примерах цепь 104 вибрационного мониторинга постоянно (например, периодически, не периодически) собирает данные о вибрациях от приведенного в качестве примера датчика 224 соединителя штока и определяет новую вибрационную характеристику для соединителя 208 штока. Если новая вибрационная характеристика отличается от нормализованной вибрационной характеристики (например, собственной частоты соединителя 208 штока во время работы), приведенная в качестве примера цепь 104 вибрационного мониторинга может определять, например, неплотности в движущихся элементах узла клапана вследствие износа или повреждения уплотнения, связанного с приведенным в качестве примера плунжером 214 клапана.
[0037] В некоторых примерах цепь 104 вибрационного мониторинга собирает и обрабатывает данные о вибрациях от датчиков, соединенных с множеством элементов устройства 200 управления технологическим процессом. Например, цепь 104 вибрационного мониторинга собирает данные о вибрациях от устройства настройки (например, внутреннего элемента в устройстве 200 управления технологическим процессом, такого как приведенный в качестве примера приводной механизм 204) и от наружного корпуса (например, труба 216) с помощью приведенных в качестве примеров датчиков 220 и 228 соответственно. Приведенная в качестве примера цепь 104 вибрационного мониторинга может рассчитывать коэффициент пропускаемости на основе данных о вибрациях, собранных с помощью датчиков 220 и 228. Коэффициент пропускаемости представляет собой отношение амплитуды сигнала на выходе к амплитуде сигнала на входе. Таким образом, в иллюстрируемом примере данное отношение представляет усиление движения от трубы 216 к приводному механизму 204. Например, коэффициент пропускаемости может быть рассчитан по величине смещения, измеренной датчиком 220 приводного механизма, деленной на величину смещения, измеренную датчиком 228 трубопровода. Данный коэффициент может сравниваться с пороговым значением, и, если коэффициент превышает пороговое значение, цепь 104 вибрационного мониторинга может определить избыточную величину усиления, поскольку центр тяжести приводного механизма 204 перемещается дальше от осевой линии трубы 216. Как вариант, приведенная в качестве примера цепь 104 вибрационного мониторинга может рассчитывать разность между данными о вибрациях, полученными от устройства настройки и наружного корпуса устройства 200 управления технологическим процессом. Например, цепь 104 вибрационного мониторинга может рассчитывать разность между частотами, полученными от датчиков 220 и 228. Если эта разность превышает пороговое значение, цепь 104 вибрационного мониторинга может определять неустойчивую настройку (например, неплотности в направляющих) из-за износа уплотнения или чрезмерной вибрации, вызванной потоком технологической среды.
[0038] В иллюстрируемом примере по фиг. 2, когда цепь 104 вибрационного мониторинга определяет состояние устройства 200 управления технологическим процессом, цепь 104 вибрационного мониторинга выводит показание на приведенные в качестве примеров управляющее устройство 106 по фиг. 1 и/или пользовательский интерфейс 108 по фиг. 1. Например, если цепь 104 вибрационного мониторинга определяет повреждение конструкции в устройстве 200 управления технологическим процессом, цепь 104 вибрационного мониторинга выводит показание на приведенное в качестве примера управляющее устройство 106. В некоторых примерах цепь 104 вибрационного мониторинга выводит показание на управляющее устройство 106, когда происходит событие (например, состояние определено). В некоторых примерах цепь 104 вибрационного мониторинга постоянно выводит (например, периодически, не периодически) показание о состоянии устройства 200 управления технологическим процессом.
[0039] В некоторых примерах цифровое устройство позиционирования клапана (digital valve positioner (DVP)) может также быть соединено с устройством 200 управления технологическим процессом для сбора данных от устройства управления технологическим процессом. Например, DVP может собирать и определять данные, такие как, например, положение штока 206 приводного механизма и/или штока 210 клапана, направление перемещения, данные, полученные от датчиков (например, данные о вибрациях), и/или другие данные. Во время работы DVP передает данные к управляющему устройству 106 по фиг. 1 и принимает данные от управляющего устройства 106.
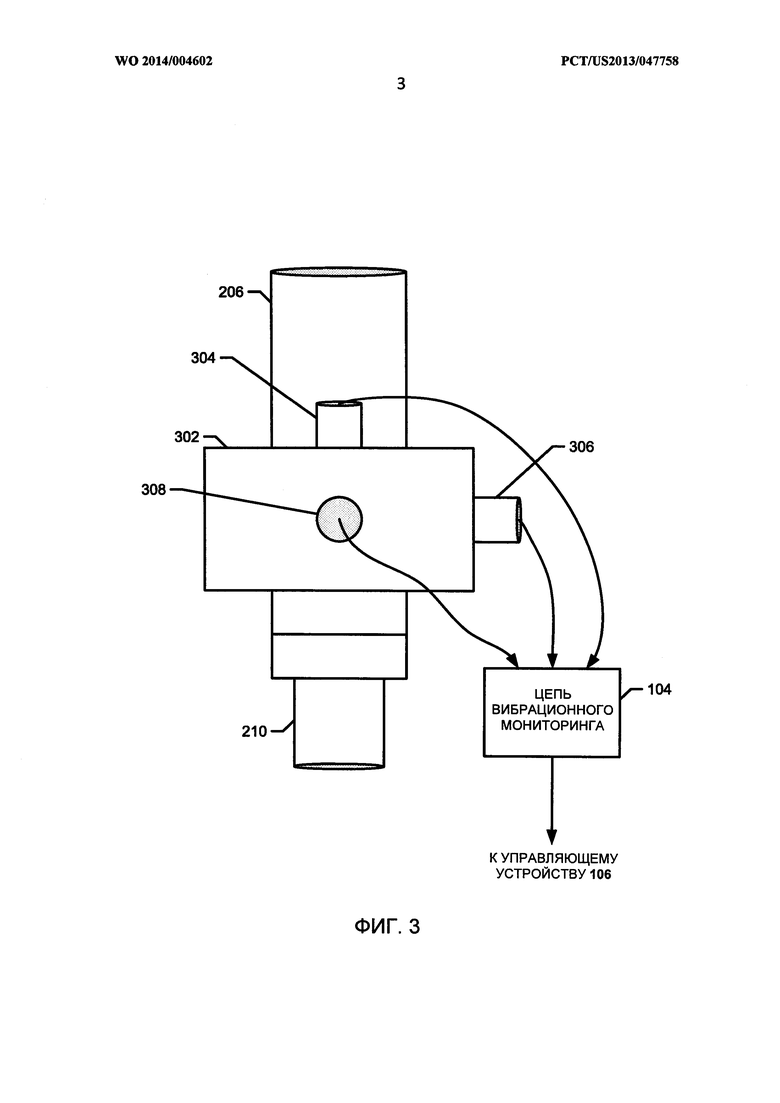
[0040] Фиг. 3 иллюстрирует альтернативный вариант соединителя 302 штока, который может использоваться с устройством 200 управления технологическим процессом по фиг. 2. Приведенный в качестве примера соединитель 302 штока по фиг. 3 соединен со штоком 206 приводного механизма, и шток 210 клапана описан выше в связи с фиг. 2. Датчики с первого по третий, 304, 306 и 308, функционально связаны с соединителем 208 штока. Каждый из этих датчиков 304-308 измеряет данные о вибрациях от соединителя 302 штока на взаимно перпендикулярных осях. Например, первый датчик 304 измеряет данные о вибрациях, связанных с соединителем 302 штока (например, смещение соединителя 302 штока), вдоль первой оси относительно соединителя 302 штока, второй датчик 306 измеряет данные о вибрациях, связанные с соединителем 302 штока (например, смещение соединителя 302 штока), вдоль второй оси относительно соединителя 302 штока, и третий датчик 308 измеряет данные о вибрациях, связанные с соединителем 302 штока (например, смещение соединителя 302 штока), вдоль третьей оси относительно соединителя 302 штока.
[0041] В иллюстрируемом примере по фиг. 3 приведенная в качестве примера цепь 104 вибрационного мониторинга собирает данные о вибрациях от каждого датчика, соединенного с соединителем 302 штока (например, датчики 304-308), обрабатывает данные о вибрациях и сравнивает данные о вибрациях с известным пороговым значением и/или диапазоном. Например, цепь 104 вибрационного мониторинга рассчитывает отношение, основанное на полученных данных о вибрациях от первого и второго датчиков 304 и 306. В иллюстрируемом примере, если расчетное отношение превышает пороговое значение, связанное с данными о вибрациях от соединителя 302 штока, цепь 104 вибрационного мониторинга определяет состояние устройства 200 управления технологическим процессом по фиг. 2.
[0042] На фиг. 4, 5 и 6 приведены блок-схемы, представляющие примеры раскрываемых здесь способов. Некоторые или все примеры способов по фиг. 4, 5 и 6 могут выполняться с помощью процессора, управляющего устройства 106 и/или другого подходящего устройства обработки данных. В некоторых примерах некоторые или все примеры способов по фиг. 4, 5 и 6 реализованы в кодах команд, сохраняемых на материальном машинном доступном или читаемом носителе, таком как флэш-память, ПЗУ и/или оперативное запоминающее устройство (ОЗУ), связанное с процессором. В качестве альтернативы, некоторые или все варианты осуществления способов по фиг. 4, 5 и 6 могут быть реализованы с использованием любых сочетаний применения конкретной интегральной схемы (схем) (application specific integrated circuit (ASIC)), программируемого логического устройства (устройств) (programmable logic devices (PLD)), логической схемы (схем), программируемой потребителем (field programmable logic device (FPLD(s))), дискретных логических устройств, аппаратного оборудования, программно-аппаратных средств и др. Кроме того, один или несколько вариантов работы, показанных на фиг. 4, 5 и 6, можно реализовать, используя ручные операции или любое сочетание любых указанных методов, как, например, любое сочетание программно-аппаратных средств, программного обеспечения, дискретных логических устройств и/или аппаратного обеспечения. Кроме того, хотя варианты осуществления способов раскрыты со ссылками на блок-схемы, проиллюстрированные на фиг. 4, 5 и 6, могут использоваться многие другие способы воплощения вариантов осуществления способов. Например, можно изменять очередность выполнения блоков, и/или можно изменять, исключать, подразделять, или объединять некоторые из описанных блоков. Кроме того, любые или все примеры способов, показанные на фиг. 4, 5 и 6, могут выполняться последовательно и/или параллельно, например отдельные потоки обработки, процессоры, устройства, устройства дискретной логики, схемы и др.
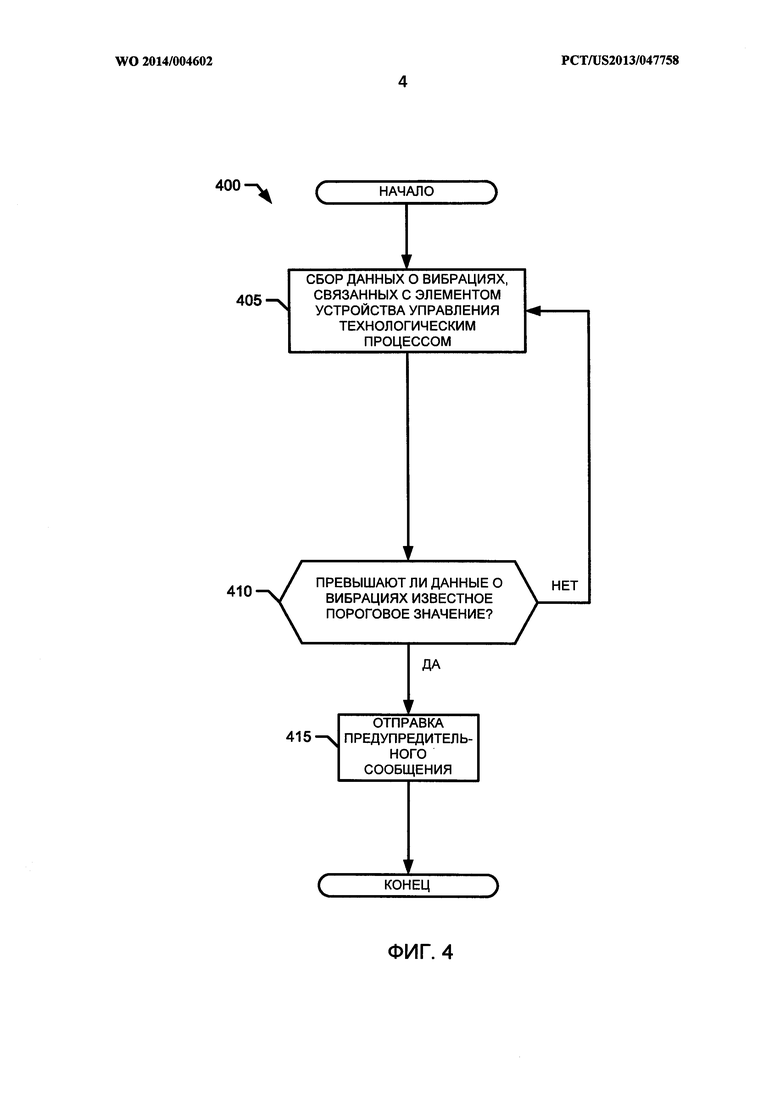
[0043] Со ссылкой на фиг. 1-3 приведенный в качестве примера способ или процесс 400 по фиг. 4 начинается со сбора данных о вибрациях, связанных с элементом устройства 200 управления технологическим процессом (блок 405). В некоторых примерах механические соединения между элементами устройства 200 управления технологическим процессом могут привносить вибрации во время работы устройства 200 управления технологическим процессом. Во время работы датчик, функционально связанный с элементом устройства 200 управления технологическим процессом (например, датчики 220-228 по фиг. 2), измеряет вибрации, соответствующие элементу. Эти данные о вибрациях передаются (например, по проводной или беспроводной линии связи) к цепи 104 вибрационного мониторинга. Цепь 104 вибрационного мониторинга постоянно (например, периодически, не периодически) собирает данные о вибрациях (например, передаваемые от датчиков 220-228), соответствующие элементу устройства 200 управления технологическим процессом.
[0044] В блоке 410 полученные или собранные данные о вибрациях сравниваются с известным пороговым значением, связанным с элементом устройства 200 управления технологическим процессом. В некоторых примерах цепь 104 вибрационного мониторинга определяет датчик, от которого были получены данные о вибрациях, и характеристику (характеристики) данных о вибрациях (например, частота, смещение, ускорение и/или скорость). Цепь 104 вибрационного мониторинга сравнивает данные о вибрациях или характеристику (характеристики) с известным пороговым значением, соответствующим полученным данным о вибрациях. В некоторых примерах известное пороговое значение извлекается из локальной памяти в цепи 104 вибрационного мониторинга. В других примерах цепь 104 вибрационного мониторинга получает известное пороговое значение от удаленного запоминающего устройства. Например, известное пороговое значение может быть извлечено из управляющего устройства 106 или из центрального устройства с помощью шины данных.
[0045] Если данные о вибрациях превышают известное пороговое значение, отправляется предупредительное сообщение (блок 415). Например, цепь 104 вибрационного мониторинга и/или управляющее устройство 106 создает и отправляет предупредительное сообщение на пользовательский интерфейс 108, который отображает предупредительное сообщение с помощью устройства 112 вывода данных. Если принятые данные о вибрациях не превышают известное пороговое значение, способ возвращается к блоку 405. В противном случае процесс заканчивается.
[0046] В некоторых примерах цепь 104 вибрационного мониторинга сравнивает данные о вибрациях или характеристику (характеристики) данных о вибрациях с множеством пороговых значений. Например, данные о вибрациях, превышающих первое пороговое значение, но меньших, чем второе пороговое значение, могут указывать на ослабленное механическое соединение (например, вследствие неисправного поршневого кольца на плунжере 214 клапана), а данные о вибрациях, превышающих второе пороговое значение, могут указывать на поврежденный элемент (например, на неисправную пружину 234 приводного механизма).
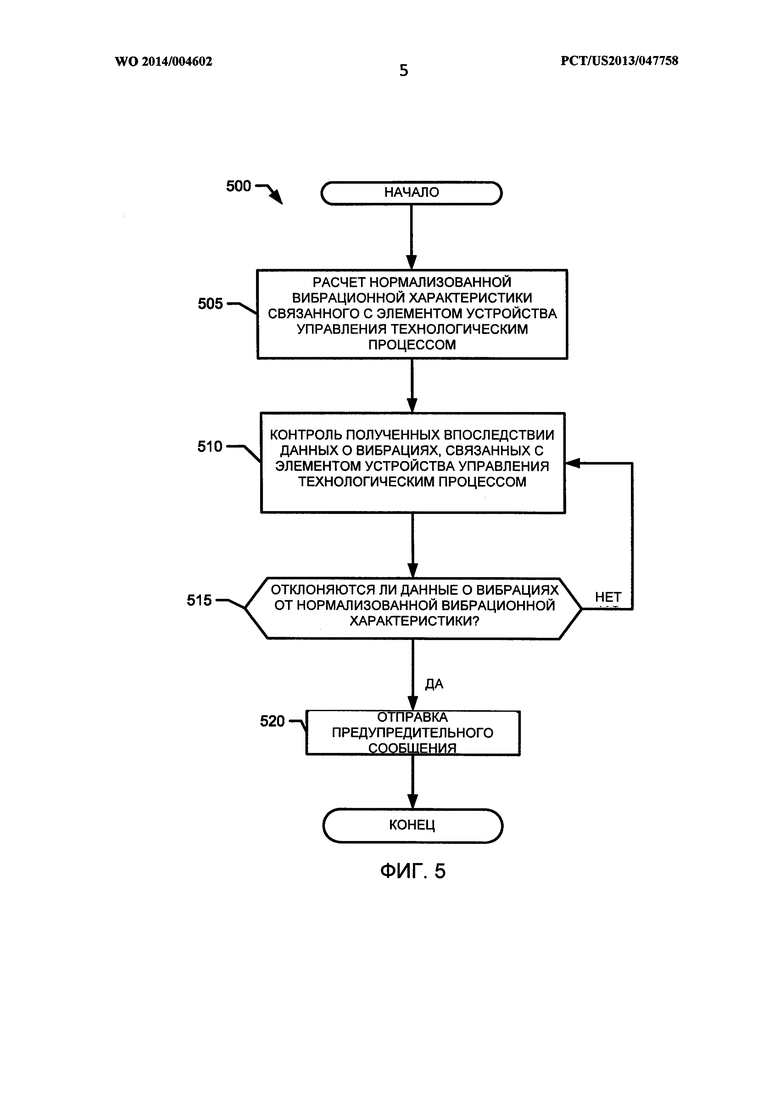
[0047] На фиг. 5 приведена блок-схема, представляющая другой пример процесса или способа 500, раскрываемого в настоящем документе. Процесс или способ 500 начинается с расчета нормализованной вибрационной характеристики, связанной с элементом устройства 200 управления технологическим процессом (блок 505). Например, цепь 104 вибрационного мониторинга может обрабатывать данные о вибрациях и рассчитывать нормализованную вибрационную характеристику на основании данных о вибрациях. Такая нормализованная вибрационная характеристика представляет собой эксплуатационный порог или диапазон (например, диапазон собственных частот), связанный с элементом устройства 200 управления технологическим процессом во время работы (например, во время безопасной эксплуатации).
[0048] В блоке 510 цепь 104 вибрационного мониторинга контролирует данные о вибрациях, впоследствии полученные от датчика, функционально связанного с элементом устройства 200 управления технологическим процессом (например, после калибровки). В некоторых примерах цепь 104 вибрационного мониторинга постоянно (например, периодически, не периодически и др.) собирает данные о вибрациях, связанные с устройством 200 управления технологическим процессом.
[0049] В блоке 515 цепь 104 вибрационного мониторинга или управляющее устройство 106 определяет, отклоняются ли данные о вибрациях от нормализованной вибрационной характеристики. Например, цепь 104 вибрационного мониторинга определяет, выходят ли данные о вибрациях за пределы рабочего диапазона. Если данные о вибрациях выходят за пределы рабочего диапазона, отправляется предупредительное сообщение (блок 520). Если данные о вибрациях находятся в пределах рабочего диапазона, способ возвращается к блоку 510. В противном случае процесс заканчивается.
[0050] В некоторых примерах цепь 104 вибрационного мониторинга периодически калибруется (например, перекалибруется). Например, цепь 104 вибрационного мониторинга рассчитывает нормализованную вибрационную характеристику, связанную с элементом устройства 200 управления технологическим процессом, каждые 24 часа. В некоторых подобных примерах, если данные о вибрациях находятся в пределах рабочего диапазона (например, не отправлено предупредительное сообщение), способ или процесс 500 включает в себя проверку того, не должна ли быть начата перекалибровка. Например, цепь 104 вибрационного мониторинга проверяет, истекло ли время, отсчитываемое таймером. Если должна быть начата перекалибровка, способ возвращается к блоку 505, а не к блоку 510.
[0051] В других примерах цепь 104 вибрационного мониторинга перекалибровывается не периодически. Например, способ или процесс 500 возвращается к блоку 505, если оправляется предупредительное сообщение.
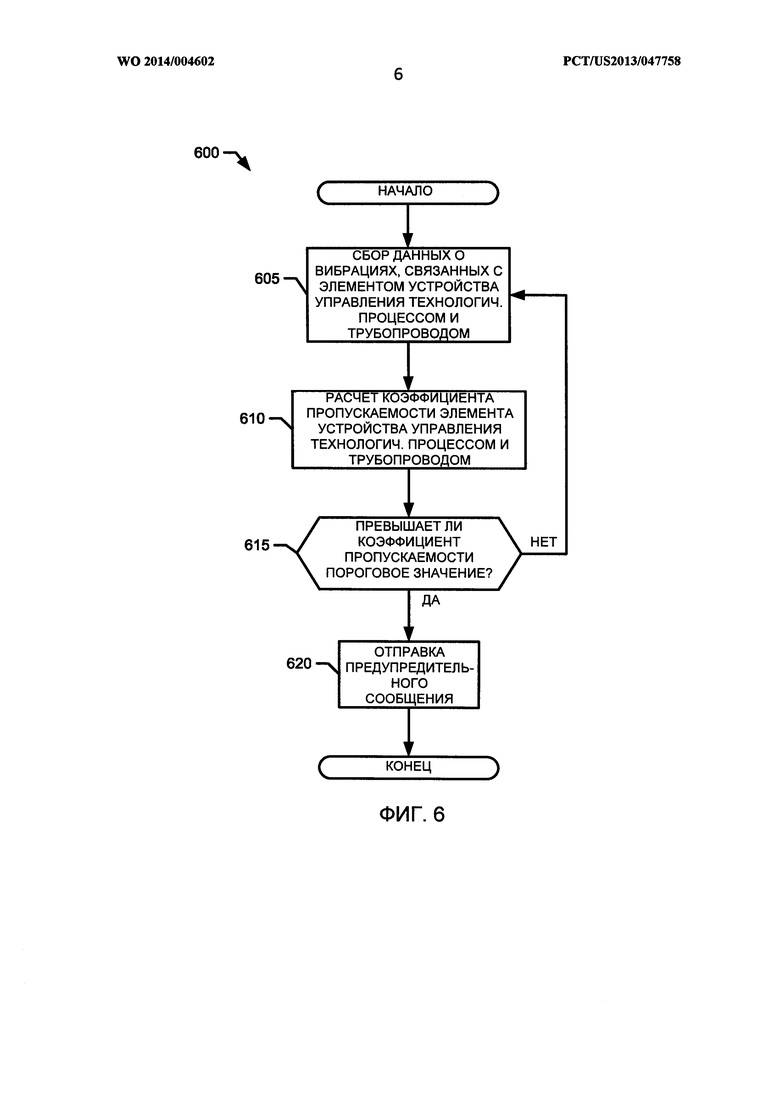
[0052] На фиг. 6 приведена блок-схема, представляющая другой пример процесса или способа 600, раскрываемого в настоящем документе. Процесс или способ 600 начинается со сбора данных о вибрациях, связанных с элементом устройства 200 управления технологическим процессом, и данных о вибрациях от датчика, функционально связанного с трубой (например, с приведенными в качестве примера трубой 216 выше по потоку или трубы 218 ниже по потоку, фиг. 2), которая соединена с устройством 200 управления технологическим процессом (блок 605). Например, цепь 104 вибрационного мониторинга собирает данные о вибрациях от датчика 220 корпуса приводного механизма и датчика 228 трубопровода. Цепь 104 вибрационного мониторинга рассчитывает коэффициент пропускаемости на основании данных о вибрациях, полученных от датчика 220 корпуса приводного механизма и датчика 228 трубопровода (блок 610). Данный коэффициент пропускаемости сравнивает данные о вибрациях, связанных с приводным механизмом (например, характеристика смещения данных о вибрациях), с данными о вибрациях, связанных с трубой (например, характеристика смещения данных о вибрациях).
[0053] В блоке 615 цепь 104 вибрационного мониторинга или управляющее устройство 106 определяет, превышает ли коэффициент пропускаемости пороговое значение. Если коэффициент пропускаемости превышает пороговое значение, отправляется предупредительное сообщение (блок 620). Если коэффициент пропускаемости не превышает пороговое значение, способ возвращается к блоку 605. В противном случае процесс заканчивается.
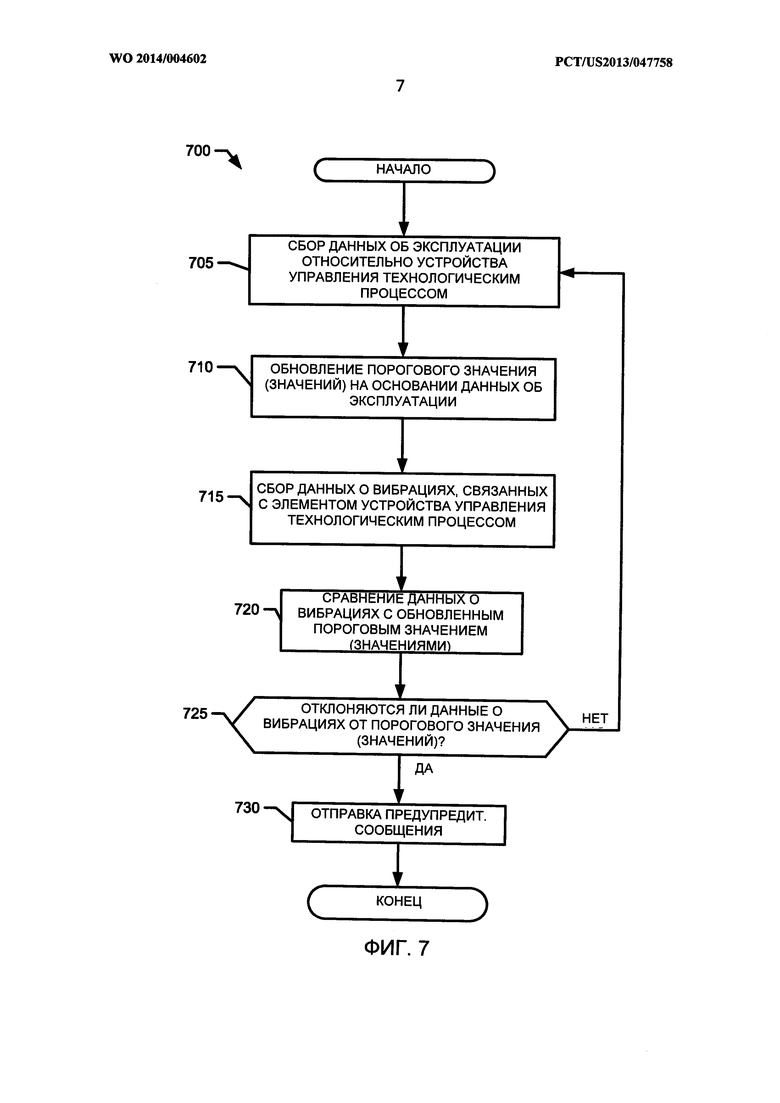
[0054] На фиг. 7 приведена блок-схема, представляющая другой пример процесса или способа 700, раскрываемого в настоящем документе. Процесс или способ 700 начинается со сбора данных об эксплуатации относительно устройства 200 управления технологическим процессом (блок 705). Например, цепь 104 вибрационного мониторинга обменивается данными с цифровым устройством позиционирования (digital valve positioner (DVP)) и принимает данные относительно, например, рабочих циклов или пройденного расстояния. Цепь 104 вибрационного мониторинга обновляет пороговое значение (значения) и/или диапазон (диапазоны) на основании данных об эксплуатации (блок 710). Например, во время каждого рабочего цикла уплотнение, связанное с плунжером 214 клапана, подвергается нагрузке и, следовательно, напряжению. В результате расходуется часть ресурса. Цепь 104 вибрационного мониторинга корректирует (например, обновляет) пороговое значение (значения) и/или диапазон (диапазоны) на основании этих данных об уменьшении ресурса (блок 710). Пороговое значение (значения) и/или диапазон (диапазоны) могут корректироваться на основании эмпирических или экспериментальных данных, сохраненных в локальной памяти в цепи 104 вибрационного мониторинга. Таким образом, цепь 104 вибрационного мониторинга корректирует пороговое значение (значения) и/или диапазон (диапазоны) для отображения ожидаемых изменений вследствие предвидимого износа или повреждения в процессе нормальной эксплуатации (например, пройденное расстояние штоком 210 клапана в течение рабочего цикла).
[0055] В блоке 715 цепь 104 вибрационного мониторинга собирает данные о вибрациях, связанных с элементом устройства 200 управления технологическим процессом. В блоке 720 собранные данные о вибрациях сравниваются с обновленным пороговым значением (значениями) и/или диапазоном (диапазонами), связанным с элементом устройства 200 управления технологическим процессом.
[0056] В блоке 725 цепь 104 вибрационного мониторинга или управляющее устройство 106 определяет, превышают ли данные о вибрациях обновленное пороговое значение (значения) и/или диапазон (диапазоны). Если данные о вибрациях превышают известное пороговое значение (или отклоняются от него), отправляется предупредительное сообщение (блок 730). Если данные о вибрациях не превышают известное пороговое значение (или не отклоняются от него), способ возвращается к блоку 705. В противном случае процесс заканчивается.
[0057] Несмотря на то, что в настоящей заявке описаны некоторые способы, устройство и готовые изделия, объем защиты настоящего изобретения не ограничивается ими. Напротив, настоящий патент охватывает все способы, устройства и изделия, объективно подпадающие под объем действия формулы настоящего патента.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ НАБЛЮДЕНИЯ ЗА СОСТОЯНИЕМ КОНСТРУКЦИИ | 2018 |
|
RU2756731C2 |
| ТЕХНОЛОГИЧЕСКОЕ УСТРОЙСТВО ВИБРАЦИОННОЙ ДИАГНОСТИКИ | 2004 |
|
RU2363029C2 |
| ДИАГНОСТИКА УСТРОЙСТВ УПРАВЛЕНИЯ С ИСПОЛЬЗОВАНИЕМ АКСЕЛЕРОМЕТРА | 2015 |
|
RU2701067C2 |
| СПОСОБ И УСТРОЙСТВО МОНИТОРИНГА РАСТВОРЕНИЯ | 2018 |
|
RU2755869C1 |
| БЕСПРОВОДНОЕ ПОЛЕВОЕ УСТРОЙСТВО СО СЪЕМНЫМ ИСТОЧНИКОМ ЭЛЕКТРОПИТАНИЯ | 2012 |
|
RU2574318C2 |
| ДИАГНОСТИКА ИМПУЛЬСНОЙ ТРУБОПРОВОДНОЙ ЛИНИИ В ТЕХНОЛОГИЧЕСКОМ ПРОЦЕССЕ | 2004 |
|
RU2366898C2 |
| ПРОГРАММИРУЕМЫЙ ПРИВОД И СПОСОБ КОНТРОЛЯ ЕГО РАБОЧЕГО СОСТОЯНИЯ И НАДЕЖНОСТИ | 2014 |
|
RU2657117C2 |
| СИСТЕМА ДОСТАВКИ АЭРОЗОЛЯ | 2018 |
|
RU2774623C2 |
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ ДИАГНОСТИКИ КЛАПАНА С ИСПОЛЬЗОВАНИЕМ ЭЛЕКТРИЧЕСКИХ ПРИВОДОВ КЛАПАНА | 2014 |
|
RU2674824C1 |
| ПЕРИФЕРИЙНОЕ УСТРОЙСТВО С БЕСПЕРЕБОЙНЫМ ПИТАНИЕМ | 2013 |
|
RU2631993C2 |
Изобретение относится к управлению технологическим процессом. В способе использования данных о вибрациях для определения состояния устройства управления собирают первые данные о вибрациях от первого датчика, связанного с устройством управления технологическим процессом, во время калибровки; рассчитывают эксплуатационный порог устройства управления на основании первых данных о вибрациях; собирают данные об эксплуатации относительно устройства управления. Данные об эксплуатации указывают на ресурс, связанный с устройством управления. Обновляют эксплуатационный порог на основании указанных данных об эксплуатации. Обновленный эксплуатационный порог указывает на уменьшенный оставшийся ресурс, связанный с устройством управления. Собирают вторые данные о вибрациях от первого датчика после калибровки цепи вибрационного мониторинга и определяют состояние устройства управления технологическим процессом, если вторые данные о вибрациях превышают обновленный эксплуатационный порог. Улучшаются эксплуатационные качества устройства управления. 4 н. и 19 з.п. ф-лы, 7 ил.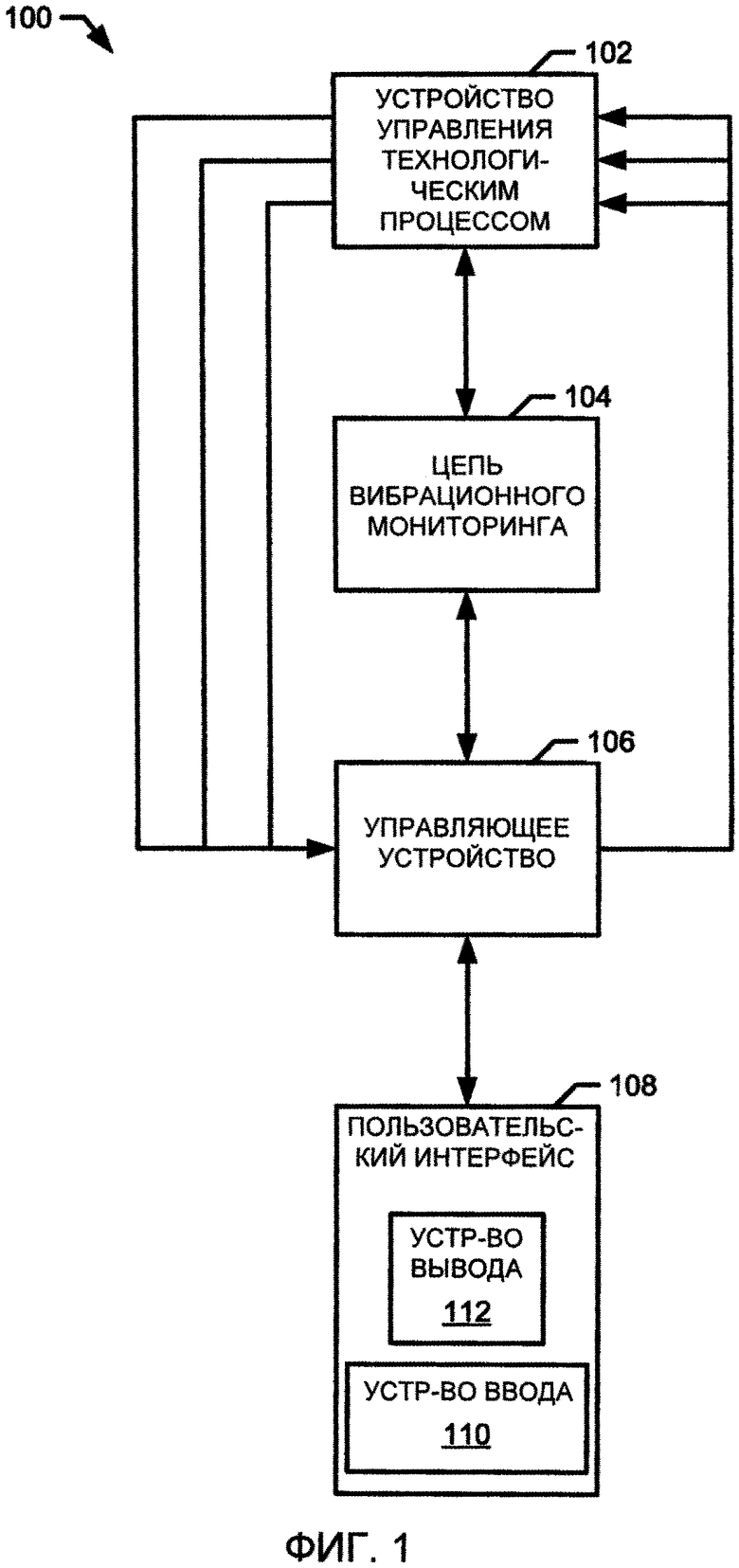
1. Способ использования данных о вибрациях для определения состояния устройства управления, включающий в себя:
сбор первых данных о вибрациях от первого датчика, функционально связанного с устройством управления технологическим процессом, во время калибровки;
расчет эксплуатационного порога устройства управления технологическим процессом на основании первых данных о вибрациях;
сбор данных об эксплуатации относительно устройства управления технологическим процессом, причем указанные данные об эксплуатации указывают на часть ресурса, связанного с устройством управления технологическим процессом;
обновление эксплуатационного порога на основании указанных данных об эксплуатации, причем указанный обновленный эксплуатационный порог указывает на уменьшенный оставшийся ресурс, связанный с устройством управления технологическим процессом;
сбор вторых данных о вибрациях от первого датчика после калибровки цепи вибрационного мониторинга и
определение состояния устройства управления технологическим процессом, если указанные вторые данные о вибрациях превышают указанный обновленный эксплуатационный порог.
2. Способ по п. 1, в котором первые и вторые данные о вибрациях содержат данные об ускорении, данные о скорости, данные о смещении или данные о частоте.
3. Способ по любому из пп. 1 или 2, кроме того, включающий в себя:
сбор третьих данных о вибрациях от второго датчика, функционально связанного с трубой, которая соединена с устройством управления технологическим процессом;
расчет отношения на основании вторых данных о вибрациях и третьих данных о вибрациях и
определение состояния устройства управления технологическим процессом, когда отношение превышает пороговое значение.
4. Способ по любому из пп. 1 или 2, в котором пороговое значение зависит от местоположения первого датчика.
5. Способ по любому из пп. 1 или 2, дополнительно включающий в себя:
расчет разности на основании третьих данных о вибрациях и вторых данных о вибрациях и
определение состояния устройства управления технологическим процессом, когда разность превышает пороговое значение.
6. Способ по любому из пп. 1 или 2, дополнительно включающий в себя:
сравнение вторых данных о вибрациях с известным пороговым значением и
определение состояния устройства управления технологическим процессом, если вторые данные о вибрациях превышают известное пороговое значение.
7. Способ использования данных о вибрациях для определения состояния устройства управления, включающий в себя:
сбор первых данных о вибрациях от первого датчика, функционально связанного с устройством управления технологическим процессом,
расчет порогового значения на основании первых данных о вибрациях;
сбор данных об эксплуатации относительно устройства управления технологическим процессом, причем указанные данные об эксплуатации указывают на часть ресурса, связанного с устройством управления технологическим процессом;
обновление порогового значения на основании указанных данных об эксплуатации, причем указанное обновленное пороговое значение указывает на уменьшенный оставшийся ресурс, связанный с устройством управления технологическим процессом;
сбор вторых данных о вибрациях от второго датчика, функционально связанного с трубой, причем труба соединена с устройством управления технологическим процессом;
расчет отношения на основании первых данных о вибрациях и вторых данных о вибрациях и
указание состояния устройства управления технологическим процессом, если указанное отношение больше, чем указанное обновленное пороговое значение.
8. Способ по п. 7, в котором первые и вторые данные о вибрациях содержат данные об ускорении, данные о скорости, данные о смещении или данные о частоте.
9. Способ по любому из пп. 7 или 8, в котором пороговое значение зависит от местоположения первого датчика.
10. Способ использования данных о вибрациях для определения состояния устройства управления, включающий в себя:
сбор данных о вибрациях от первого датчика, функционально связанного с устройством управления технологическим процессом;
получение диагностических данных о вибрациях, связанных с устройством управления технологическим процессом;
сбор данных об эксплуатации относительно устройства управления технологическим процессом, причем указанные данные об эксплуатации указывают на часть ресурса, связанного с устройством управления технологическим процессом;
обновление диагностических данных о вибрациях на основании указанных данных об эксплуатации, причем указанные обновленные диагностические данные о вибрациях указывают на уменьшенный оставшийся ресурс, связанный с устройством управления технологическим процессом;
сравнение данных о вибрациях с указанными обновленными диагностическими данными о вибрациях и
указание состояния устройства управления технологическим процессом на основании сравнения.
11. Способ по п. 10, в котором диагностические данные о вибрациях включают известные диапазоны данных о вибрациях.
12. Способ по любому из пп. 10 или 11, в котором данные о вибрациях содержат данные об ускорении, данные о скорости, данные о смещении или данные о частоте.
13. Способ по любому из пп. 10 или 11, кроме того, включающий в себя:
сбор вторых данных о вибрациях от второго датчика, функционально связанного с трубой, которая соединена с устройством управления технологическим процессом;
расчет отношения между данными о вибрациях, связанных с устройством управления технологическим процессом, и вторыми данными о вибрациях и
определение состояния устройства управления технологическим процессом, когда коэффициент превышает пороговое значение.
14. Способ по п. 13, в котором пороговое значение зависит от местоположения первого датчика.
15. Способ по любому из пп. 10 или 11, в котором диагностические данные о вибрациях включают в себя частотный диапазон.
16. Способ по любому из пп. 10 или 11, в котором частотный диапазон указывает на неустойчивость управления устройства управления технологическим процессом.
17. Способ по любому из пп. 10 или 11, в котором частотный диапазон включает в себя от 1 до 10 Гц.
18. Способ по любому из пп. 10 или 11, в котором частотный диапазон указывает состояние последовательности технологического процесса, связанное с устройством управления технологическим процессом.
19. Способ по любому из пп. 10 или 11, в котором частотный диапазон включает в себя от 10 до 100 Гц.
20. Способ по любому из пп. 10 или 11, в котором частотный диапазон указывает состояние, связанное с элементами клапана, контактирующими с рабочей средой, устройства управления технологическим процессом.
21. Способ по любому из пп. 10 или 11, в котором частотный диапазон включает в себя частоты свыше 100 Гц.
22. Способ использования данных о вибрациях для определения состояния устройства управления, включающий в себя:
сбор первых данных о вибрациях от первого датчика, функционально связанного с устройством управления технологическим процессом;
определение характеристики устройства управления технологическим процессом по первым данным о вибрациях;
определение известного диапазона для указанной характеристики;
сбор данных об эксплуатации относительно устройства управления технологическим процессом, причем указанные данные об эксплуатации указывают на часть ресурса, связанного с устройством управления технологическим процессом;
обновление указанного известного диапазона на основании указанных данных об эксплуатации, причем указанный обновленный известный диапазон указывает на уменьшенный оставшийся ресурс, связанный с устройством управления технологическим процессом;
определение того, находится ли указанная характеристика в пределах указанного обновленного известного диапазона, и,
если указанная характеристика находится в пределах указанного обновленного известного диапазона, указание состояния устройства управления технологическим процессом.
23. Способ по п. 22, который дополнительно включает в себя:
сбор вторых данных о вибрациях от второго датчика, функционально связанного с трубой, которая соединена с устройством управления технологическим процессом;
расчет отношения на основании первых данных о вибрациях и вторых данных о вибрациях и
определение состояния устройства управления технологическим процессом, когда коэффициент превышает пороговое значение.
| US 2006265106 A1, 23.11.2006 | |||
| US 4831365 A, 16.05.1989 | |||
| US 5549137 A, 27.08.1996 | |||
| Устройство для обработки цилиндрических поверхностей | 1974 |
|
SU489597A2 |

