ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к бортовому устройству.
УРОВЕНЬ ТЕХНИКИ
[0002] Бортовая камера, которая зачастую монтируется за пределами транспортного средства, может включать в себя систему удаления посторонних веществ, которая быстро удаляет накопление постороннего вещества, такого как капли воды, грязь и агенты для обеспечения таяния снега, которые имеют тенденцию легко возникать на ее фотографической линзе. В предшествующем уровне техники предлагается устройство захвата изображений, которое допускает верификацию того, удалено или нет постороннее вещество с оптического элемента (см. патентный документ 1).
СПИСОК БИБЛИОГРАФИЧЕСКИХ ССЫЛОК
ПАТЕНТНЫЕ ДОКУМЕНТЫ
[0003] Патентная литература 1. Выложенная японская патентная публикация номер 2010-109516
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ЗАДАЧА
[0004] Цель настоящего изобретения заключается в том, чтобы обеспечивать то, что фотографическая линза в бортовой камере моется оптимальным способом.
РЕШЕНИЕ ЗАДАЧИ
[0005] Бортовое устройство, согласно первому аспекту настоящего изобретения, которое выводит управляющий сигнал в модуль управления очисткой, который управляет модулями удаления накоплений, используемыми для того, чтобы удалять накопления, оседающие на фотографической линзе в бортовой камере, посредством применения множества способов, содержит: модуль обнаружения накоплений, который обнаруживает накопление, оседающее на фотографической линзе, из фотографического изображения, выводимого из бортовой камеры, когда скорость транспортного средства, вводимая в него, равна или превышает предварительно определенную скорость транспортного средства; модуль выбора, который выбирает модуль удаления накоплений, применяющий первый способ, из модулей удаления накоплений, применяющих множество способов; и модуль определения удаления, который выполняет определение на основе фотографического изображения в отношении того, удалено или нет накопление с фотографической линзы до операции удаления, выполняемой посредством модуля удаления накоплений, применяющего первый способ, который выбран посредством модуля выбора, при этом: если модуль определения удаления определяет то, что накопление не удалено с фотографической линзы, модуль выбора выбирает модуль удаления накоплений, применяющий второй способ, отличающийся от модуля удаления накоплений, применяющего первый способ, на основе числа раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего первый способ.
Согласно второму аспекту настоящего изобретения, в бортовом устройстве согласно первому аспекту, предпочтительно оно дополнительно содержит: модуль хранения изображений с маской, который сохраняет, если модуль определения удаления определяет то, что накопление не удалено с фотографической линзы даже после того, как выполнена операция удаления посредством активации каждого из модулей удаления накоплений, применяющих множество способов, предварительно определенное множество раз, заданное в соответствии с каждым из модулей удаления накоплений, применяющих множество способов, изображение неудаленного накопления в качестве изображения с маской, при этом: модуль обнаружения накоплений не рассматривает накопление, сохраненное в качестве изображения с маской в модуле хранения изображений с маской, в качестве цели обнаружения.
Согласно третьему аспекту настоящего изобретения, в бортовом устройстве согласно второму аспекту, предпочтительно, если модуль удаления накоплений, применяющий первый способ, удаляет накопление посредством использования сжатого воздуха; модуль удаления накоплений, применяющий второй способ, удаляет накопление посредством использования омывательной жидкости; когда число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего первый способ, равно или меньше первого предварительно определенного значения, модуль выбора выбирает модуль удаления накоплений, применяющий первый способ; когда число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего первый способ, превышает первое предварительно определенное значение, и число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего второй способ, равно или меньше второго предварительно определенного значения, модуль выбора выбирает модуль удаления накоплений, применяющий второй способ; и когда число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего первый способ, превышает первое предварительно определенное значение, и число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего второй способ, превышает второе предварительно определенное значение, модуль хранения изображений с маской сохраняет изображение с маской.
Согласно четвертому аспекту настоящего изобретения, в бортовом устройстве согласно третьему аспекту, предпочтительно, если модуль удаления накоплений, применяющий множество способов, дополнительно включает в себя модуль удаления накоплений, применяющий третий способ, который удаляет накопление посредством использования стеклоочистителя; когда число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего первый способ, равно или меньше первого предварительно определенного значения, модуль выбора выбирает модуль удаления накоплений, применяющий первый способ; когда число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего первый способ, превышает первое предварительно определенное значение, и число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего второй способ, равно или меньше второго предварительно определенного значения, модуль выбора выбирает модуль удаления накоплений, применяющий второй способ; когда число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего первый способ, превышает первое предварительно определенное значение, число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего второй способ, превышает второе предварительно определенное значение, и число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего третий способ, равно или меньше третьего предварительно определенного значения, модуль выбора выбирает модуль удаления накоплений, применяющий третий способ; и когда число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего первый способ, превышает первое предварительно определенное значение, число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего второй способ, превышает второе предварительно определенное значение, и число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего третий способ, превышает третье предварительно определенное значение, модуль хранения изображений с маской сохраняет изображение с маской.
Согласно пятому аспекту настоящего изобретения, в бортовом устройстве согласно третьему аспекту, предпочтительно, если модуль определения удаления дополнительно определяет тип накопления, удаляемого посредством операции удаления, выполняемой посредством модуля удаления накоплений, применяющего первый способ, выбранного посредством модуля выбора; модуль определения удаления идентифицирует накопление, удаляемое посредством операции удаления, выполняемой посредством модуля удаления накоплений, применяющего первый способ, в качестве накопления капель воды; и модуль определения удаления идентифицирует накопление, удаляемое посредством операции удаления, выполняемой посредством модуля удаления накоплений, применяющего второй способ, в качестве накопления грязи.
Согласно шестому аспекту настоящего изобретения, в бортовом устройстве согласно четвертому аспекту, предпочтительно, если модуль определения удаления дополнительно определяет тип накопления, удаляемого посредством операции удаления, выполняемой посредством модуля удаления накоплений, применяющего первый способ, выбранного посредством модуля выбора; модуль определения удаления идентифицирует накопление, удаляемое посредством операции удаления, выполняемой посредством модуля удаления накоплений, применяющего первый способ, в качестве накопления капель воды; модуль определения удаления идентифицирует накопление, удаляемое посредством операции удаления, выполняемой посредством модуля удаления накоплений, применяющего второй способ, в качестве накопления грязи; и модуль определения удаления идентифицирует накопление, удаляемое посредством операции удаления, выполняемой посредством модуля удаления накоплений, применяющего третий способ, в качестве накопления пятен от воды.
ПРЕИМУЩЕСТВА ИЗОБРЕТЕНИЯ
[0006] Согласно настоящему изобретению, может быть точно определено состояние фотографической линзы в бортовой камере, и может верифицироваться присутствие грязи, прилипающей к фотографической линзе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007] Фиг. 1 является блок-схемой бортового устройства, осуществляемого в первом варианте осуществления настоящего изобретения.
Фиг. 2 является иллюстрацией фотографического поля и затененной области, связанных с камерой.
Фиг. 3 является примером монтажной позиции, в которой может быть установлена камера.
Фиг. 4 является блок-схемой управления, связанной с бортовым устройством, реализуемым в первом варианте осуществления настоящего изобретения.
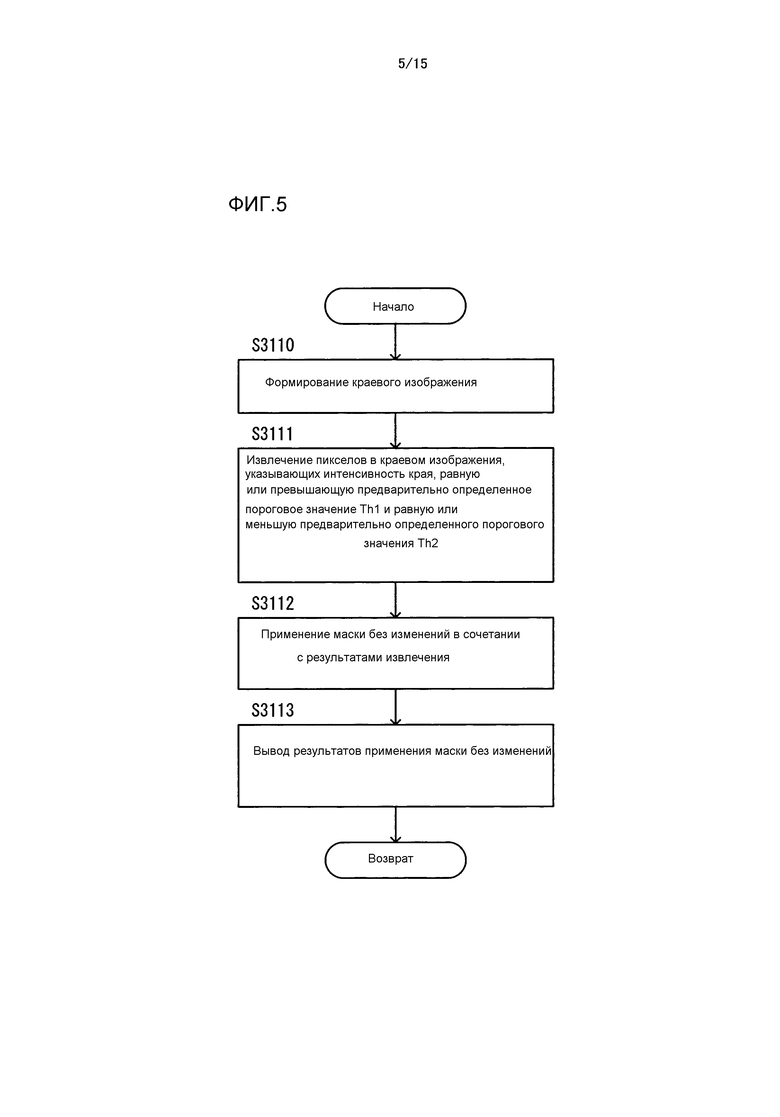
Фиг. 5 является примером блок-схемы последовательности операций способа, связанной с модулем обнаружения капель воды днем.
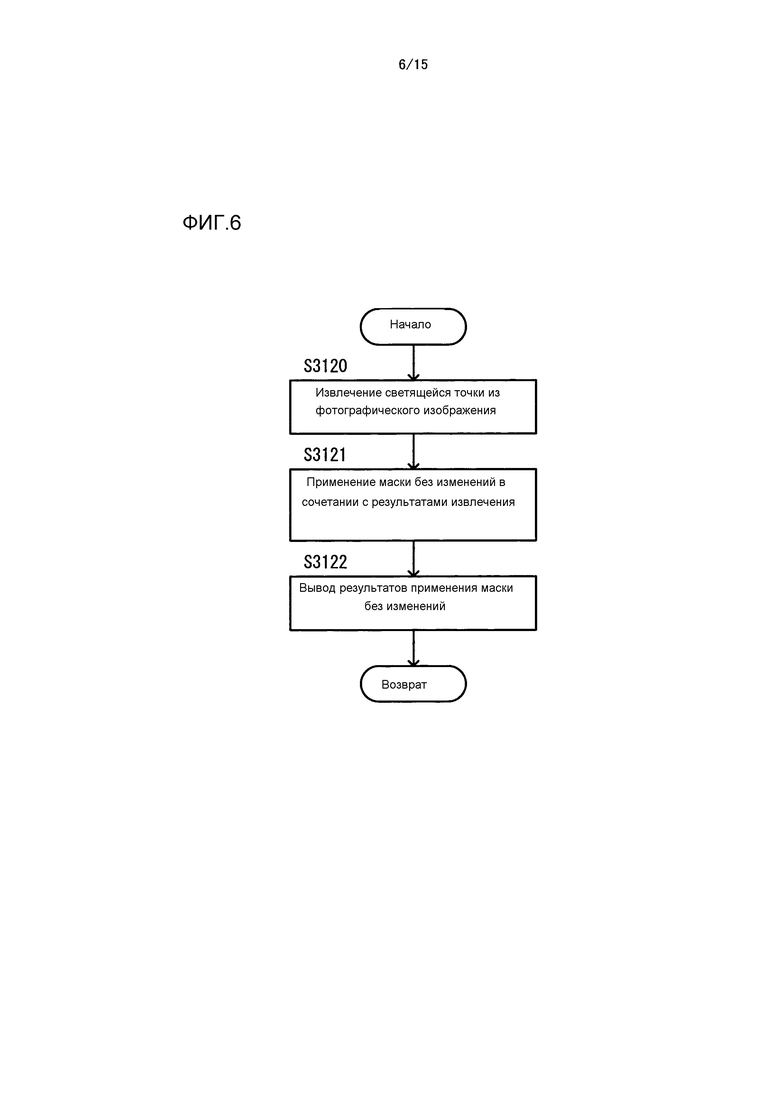
Фиг. 6 является примером блок-схемы последовательности операций способа, связанной с модулем обнаружения капель воды ночью.
Фиг. 7 является примером блок-схемы последовательности операций способа, связанной с модулем определения удаления.
Фиг. 8 является примером блок-схемы последовательности операций способа, связанной с модулем выбора устройства в бортовом устройстве, осуществляемом в первом варианте осуществления настоящего изобретения.
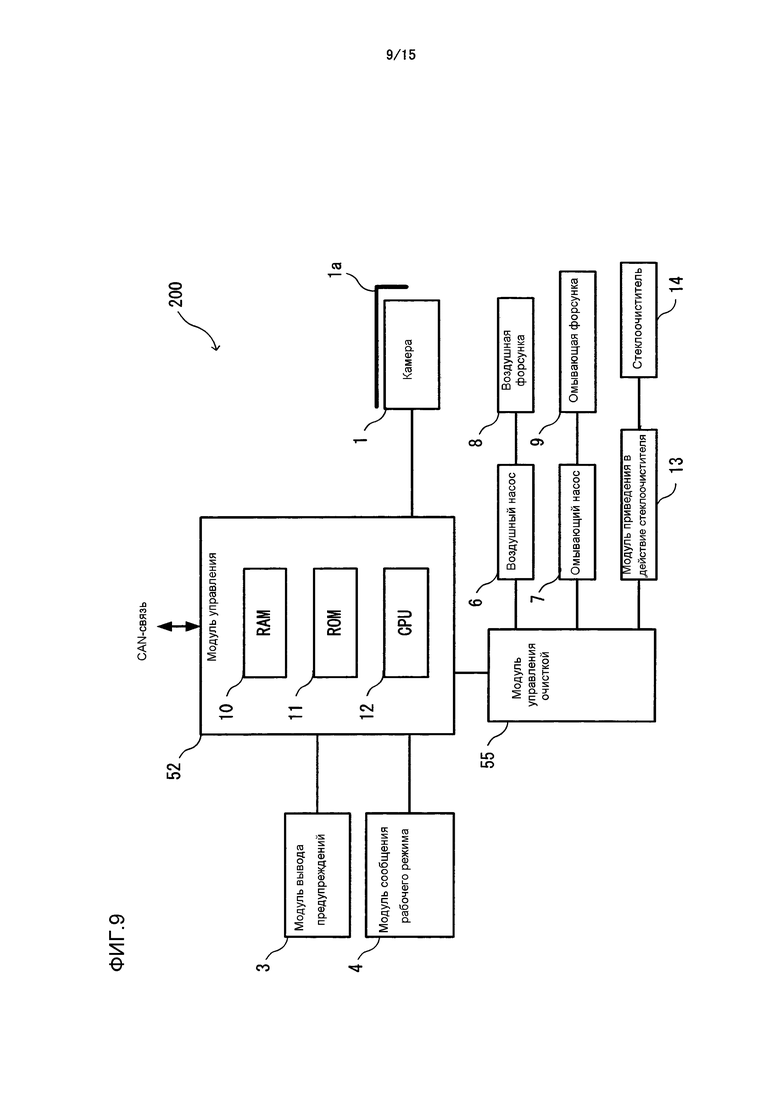
Фиг. 9 является блок-схемой бортового устройства, реализуемого во втором варианте осуществления настоящего изобретения.
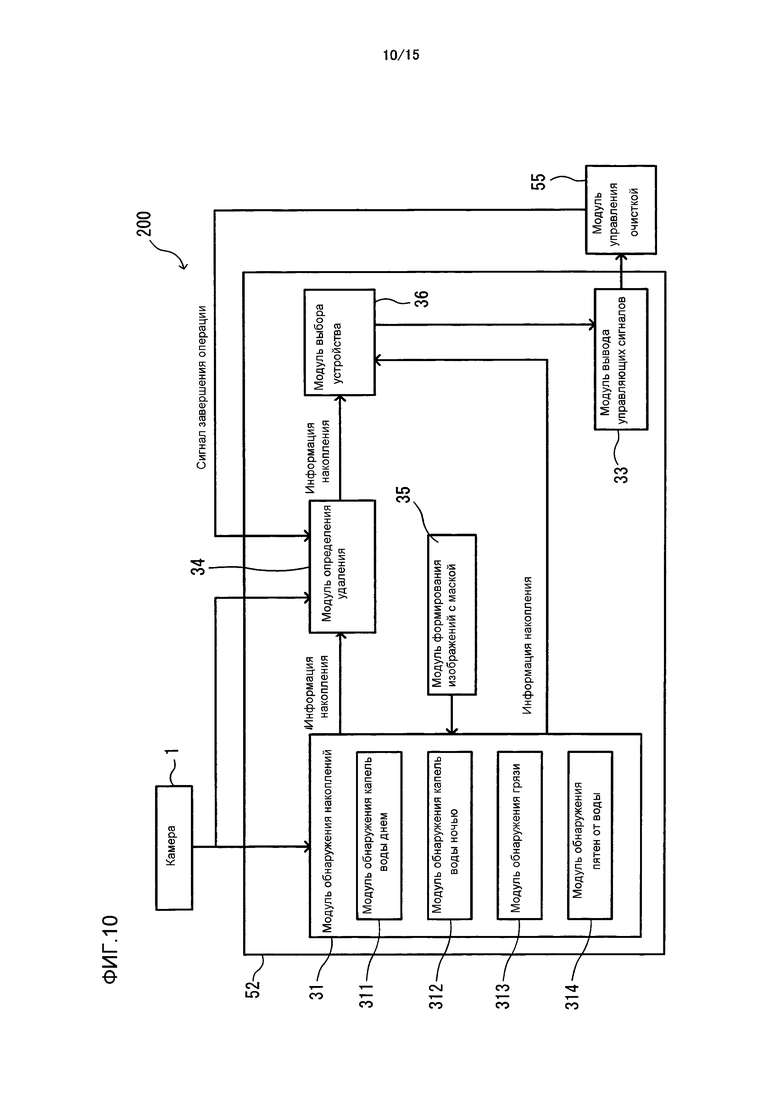
Фиг. 10 является блок-схемой управления, связанной с бортовым устройством, реализуемым во втором варианте осуществления настоящего изобретения.
Фиг. 11 является примером блок-схемы последовательности операций способа, связанной с модулем выбора устройства в бортовом устройстве, реализуемом во втором варианте осуществления настоящего изобретения.
Фиг. 12 является иллюстрациями, в отношении которых должна поясняться операция формирования маски без изменений.
Фиг. 13 является иллюстрацией, показывающей то, как используется маска без изменений.
Фиг. 14 является таблицей, указывающей конкретные типы устройств удаления, которые могут быть использованы для различных типов накопления посторонних веществ.
Фиг. 15 является иллюстрацией, показывающей то, как формируется разностное изображение.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0008] ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
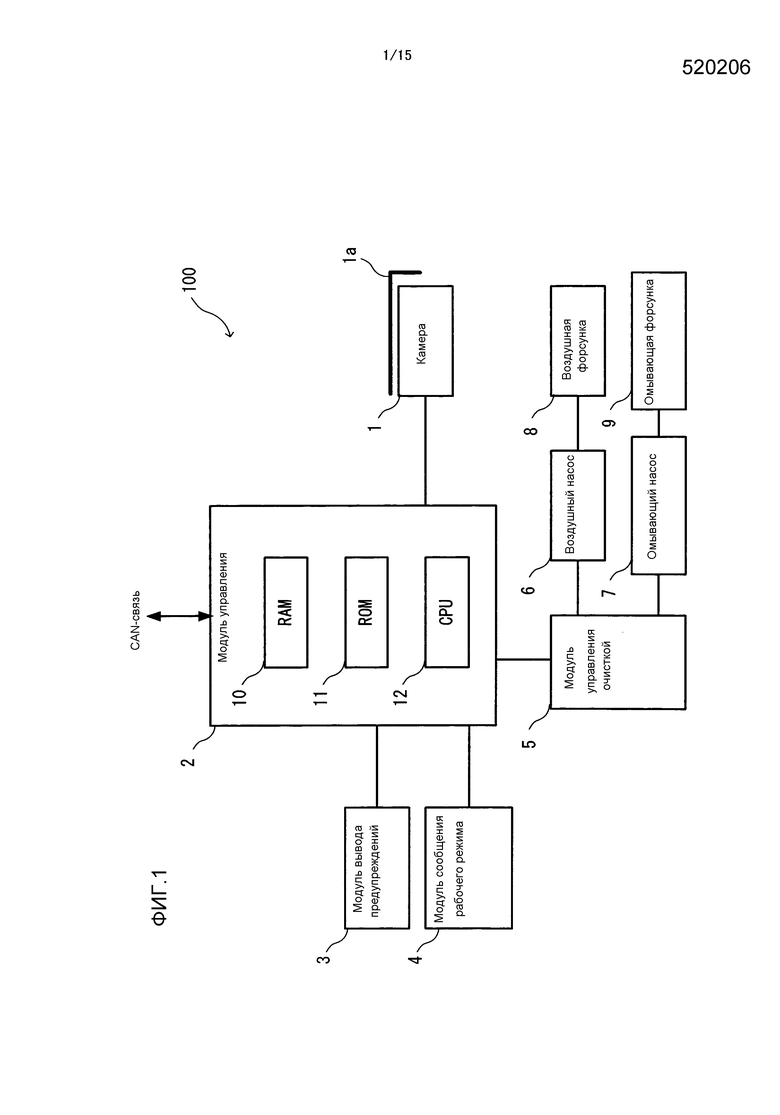
Фиг. 1 является блок-схемой бортового устройства 100, реализуемого в варианте осуществления настоящего изобретения. Бортовое устройство 100 на фиг. 1, которое устанавливается в транспортном средстве, содержит камеру 1 со светоэкранирующей пластиной 1a, смонтированной на нем, модуль 2 управления, модуль 3 вывода предупреждений, модуль 4 сообщения рабочего режима, модуль 5 управления очисткой, воздушный насос 6, омывательный насос 7, воздушную форсунку 8 и омывательную форсунку 9.
[0009] Камера 1, расположенная таким образом, что она обращена в направлении пространства позади транспортного средства, захватывает изображения в фотографическом поле, которое включает в себя поверхность дороги, простирающуюся позади транспортного средства, с предварительно определенными временными интервалами. Камера 1 включает в себя датчик изображений, такой как CCD-датчик или CMOS-датчик. Фотографическое изображение, полученное с помощью камеры 1, выводится из камеры 1 в модуль 2 управления.
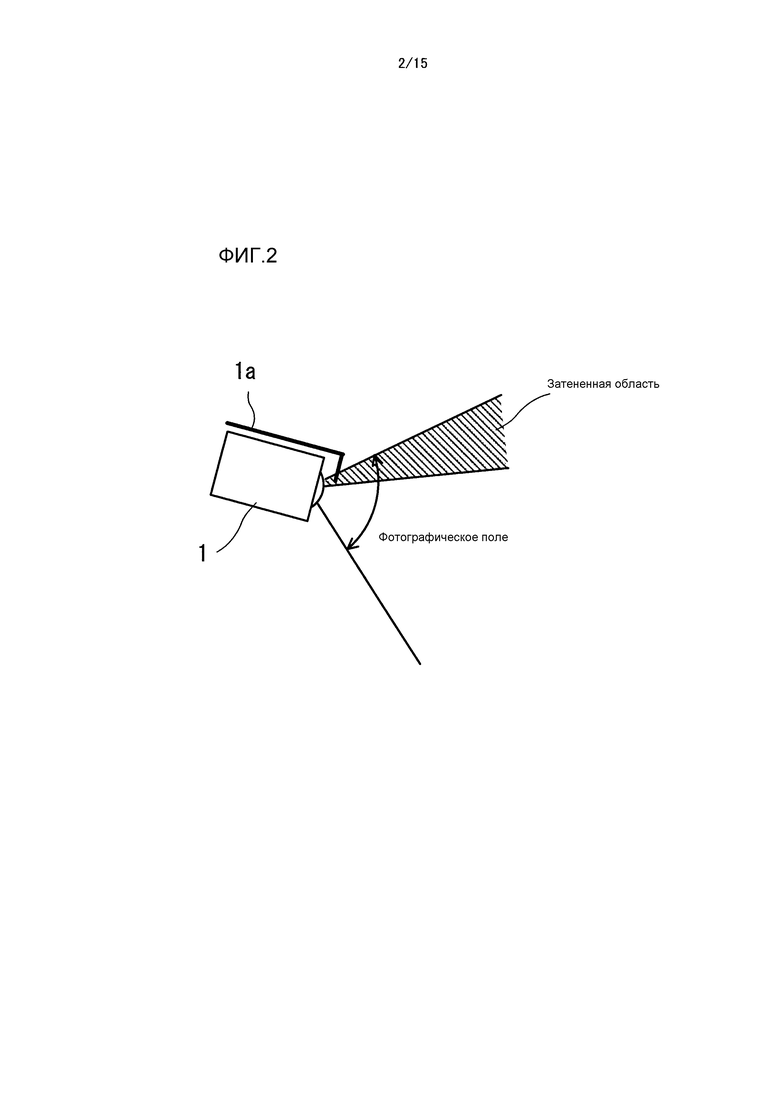
[0010] Светоэкранирующая пластина 1a монтируется в камере 1 с тем, чтобы блокировать часть света, проходящего к фотографической линзе в камере 1. Фиг. 2 показывает вид сбоку фотографического поля и затененной области относительно камеры 1. Как показывает фиг. 2, часть верхней стороны фотографического поля камеры 1 маскируется с помощью светоэкранирующей пластины 1a, за счет этого формируя затененную область. Камера 1 захватывает изображение, которое включает в себя поверхность дороги позади транспортного средства в фотографическом поле, исключая затененную область. Фотографическое поле (угол обзора) задается в относительно широком диапазоне, с тем чтобы давать возможность камере захватывать изображение поверхности дороги позади транспортного средства в достаточно широком диапазоне вдоль направления влево/вправо. Это означает то, что нежелательный свет, исходящий из источников, отличных от поверхности дороги, таких как небо и фон, в фотографическом поле, также поступает в камеру 1. Соответственно, затененная область создается через светоэкранирующую пластину 1a таким образом, что блокируется поступление такого нежелательного света в камере 1.
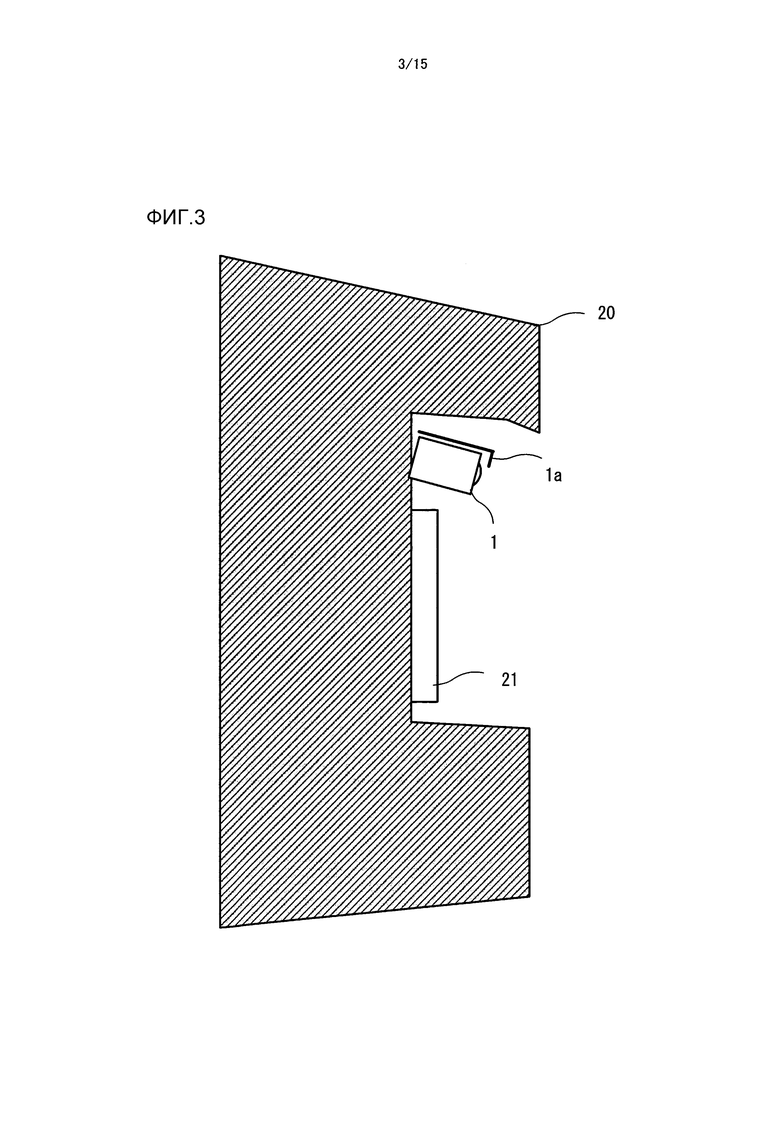
[0011] Фиг. 3 представляет пример монтажной позиции, в которой может быть установлена камера 1. Номерной знак 21 монтируется на кузове 20 в задней части рассматриваемого транспортного средства. Камера 1 монтируется таким образом, что она обращена вниз по диагонали от позиции непосредственно выше номерного знака 21, при этом светоэкранирующая пластина 1a смонтирована над камерой 1. Следует отметить, что монтажная позиция на этом чертеже представляет просто пример, и камера 1 может монтироваться в другой позиции. Монтажная позиция для камеры 1 может определяться свободно при условии, что изображение поверхности дороги позади транспортного средства может быть захвачено в оптимальном диапазоне.
[0012] Модуль 2 управления включает в себя RAM 10, ROM 11 и CPU 12. Модуль 2 управления сохраняет фотографические изображения из камеры 1 в RAM 10, выполняет предварительно определенную обработку изображений посредством использования фотографических изображений и выполняет различные типы управления на основе результатов обработки. Согласно управлению, выполняемому посредством модуля 2 управления, различные функции, такие как функция LDW (предупреждения о выезде за пределы полосы движения), функция PED (обнаружения пешеходов), функция RSR (распознавания дорожных знаков) и функция IMD (диагностики изображений) осуществляются в бортовом устройстве 100. С помощью LDW-функции обнаруживается белая линия дорожной разметки на поверхности дороги (к примеру, разделительная линия, край полосы движения или центральная линия), и выводится предупреждение, если выявляется, что рассматриваемое транспортное средство собирается выезжать за пределы текущей полосы движения. С помощью PED-функции обнаруживается форма человека в фотографическом изображении, с тем чтобы оповещать водителя в отношении присутствия пешехода на пути, по которому продвигается рассматриваемое транспортное средство. С помощью RSR-функции распознается дорожный знак на дороге, захваченный в фотографическом изображении, и водителю выдается предупреждение, если, например, рассматриваемое транспортное средство движется со скоростью, превышающей ограничение скорости, указанное на знаке. С помощью IMD-функции выполняется такая диагностика, чтобы определять то, захватываются или нет фотографические изображения корректно с помощью камеры 1.
[0013] Модуль 3 вывода предупреждений формирует предупреждения, которые должны выдаваться через лампу аварийной сигнализации, зуммер сигнализации и т.п. водителю транспортного средства. Операции модуля 3 вывода предупреждений управляются посредством модуля 2 управления. Предупреждение выводится через модуль 3 вывода предупреждений согласно управлению, выполняемому посредством модуля 2 управления, если, например, определяется то, что рассматриваемое транспортное средство собирается выезжать за пределы текущей полосы движения, с помощью LDW-функции, либо если человек, с которым может сталкиваться транспортное средство, обнаруживается с помощью PED-функции.
[0014] Модуль 4 сообщения рабочего режима сообщает рабочий режим бортового устройства 100 водителю транспортного средства. Например, если не удовлетворяются конкретные рабочие условия, и бортовое устройство 100 в силу этого находится в нерабочем режиме, модуль 4 сообщения рабочего режима выдает предупреждение водителю посредством включения лампы, установленной около водительского сиденья в транспортном средстве, согласно управлению, выполняемому посредством модуля 2 управления. За счет этих мер водитель предупреждается о том, что бортовое устройство 100 находится в нерабочем режиме.
[0015] Модуль 5 управления очисткой управляет операциями воздушного насоса 6 и омывательного насоса 7 согласно управлению, выполняемому посредством модуля 2 управления. Например, если с помощью IMD-функции, описанную выше, определяется то, что хорошие фотографические изображения не могут быть захвачены вследствие постороннего вещества, такого как капли воды, грязь или агент для обеспечения таяния снега, которое накоплено на камере 1, модуль 2 управления выводит управляющий сигнал, передающий запрос на работу воздушного насоса 6 или омывательного насоса 7, в модуль 5 управления очисткой. В ответ на этот сигнал модуль 5 управления очисткой управляет работой воздушного насоса 6 или омывательного насоса 7. Модуль 5 управления очисткой активирует воздушный насос 6 или омывательный насос 7 с тем, чтобы удалять накопленное постороннее вещество, и затем выводит сигнал, называемый "сигналом завершения операции", который указывает то, что активирован воздушный насос 6 или омывательный насос 7, в модуль 2 управления.
[0016] Воздушный насос 6, активированный согласно управлению, выполняемому посредством модуля 5 управления очисткой, выводит сжатый воздух в воздушную форсунку 8. По мере того как этот сжатый воздух принудительно подается через воздушную форсунку 8 в направлении камеры 1, постороннее вещество, такое как капли воды, накапливаемые на фотографической линзе в камере 1, продувается воздухом, и за счет этого очищается фотографическая линза.
[0017] Омывательный насос 7, активированный согласно управлению, выполняемому посредством модуля 5 управления очисткой, выводит омывающую жидкость, поданную из бачка для омывающей жидкости (не показан), в омывающую форсунку 9. По мере того как омывающая жидкость выталкивается из омывающей форсунки 9 в направлении камеры 1, смывается накопленное постороннее вещество, такое как грязь, которая не может легко удаляться с помощью сжатого воздуха из воздушной форсунки 8.
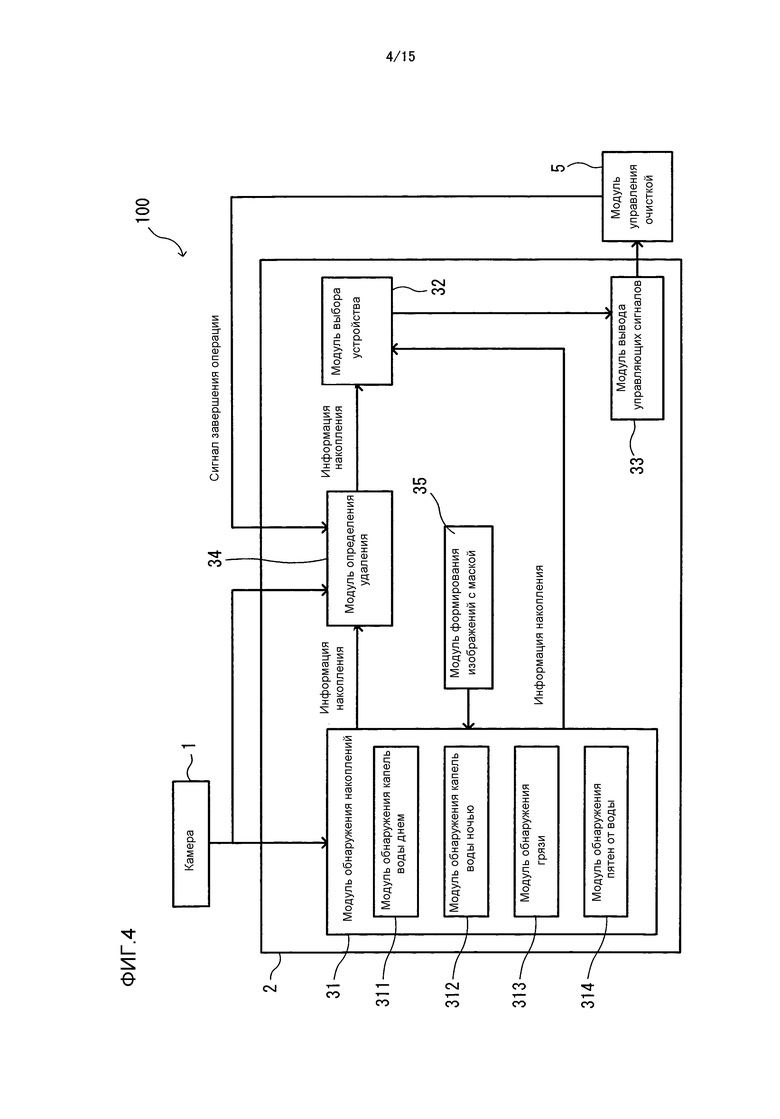
[0018] Фиг. 4 является блок-схемой управления, представляющей пример блочной конфигурации управления, которая может приспосабливаться в бортовом устройстве, осуществляемом в первом варианте осуществления настоящего изобретения. Модуль 2 управления в бортовом устройстве 100, показанном на фиг. 4, выступает в качестве модуля 31 обнаружения накоплений, модуля 32 выбора устройства, модуля 33 вывода управляющих сигналов, модуля 34 определения удаления и модуля 35 формирования изображений с маской.
[0019] Модуль 31 обнаружения накоплений обнаруживает накопление посторонних веществ из фотографических изображений, выводимых посредством камеры 1. Модуль 31 обнаружения накоплений включает в себя модуль 311 обнаружения капель воды днем, модуль 312 обнаружения капель воды ночью, модуль 313 обнаружения грязи, модуль 314 обнаружения пятен от воды и т.п.
[0020] Фотографические изображения, выводимые из камеры 1, вводятся в модуль 311 обнаружения капель воды днем, модуль 312 обнаружения капель воды ночью, модуль 313 обнаружения грязи, модуль 314 обнаружения пятен от воды и т.п. в модуле 31 обнаружения накоплений. Модуль 311 обнаружения капель воды днем и модуль 312 обнаружения капель воды ночью обнаруживают капли воды на камере из фотографического изображения. Модуль 311 обнаружения капель воды днем и модуль 312 обнаружения капель воды ночью избирательно активируются в соответствии с яркостью в окружении вокруг транспортного средства. Если транспортное средство находится в светлом окружении (днем), активируется модуль 311 обнаружения капель воды днем, тогда как если транспортное средство находится в темном окружении (ночью), активируется модуль 312 обнаружения капель воды ночью. Модуль 313 обнаружения грязи обнаруживает накопление грязи на камере из фотографического изображения. Модуль 314 обнаружения пятен от воды обнаруживает образование пятен от воды из фотографического изображения. Информация, указывающая позицию, форму, размер и т.п. каждого накопления или отложения, обнаруженного посредством любого из модулей, включенных в модуль 31 обнаружения накоплений, выводится в качестве информации накопления в модуль 32 выбора устройства и модуль 34 определения удаления.
[0021] Следует отметить, что царапина на линзе, постороннее вещество, оседающее на светоэкранирующей пластине 1a и т.п., которые не могут удаляться, могут указываться в результатах обнаружения, предоставленных посредством модуля в модуле 31 обнаружения накоплений, в качестве постороннего вещества, такого как капли воды, грязь или пятна от воды. Если сжатый воздух или омывающая жидкость многократно выводится для того, чтобы удалять такую царапину или неудаляемое постороннее вещество, грязь может сохнуть с помощью сжатого воздуха, либо может истощаться бачок для омывающей жидкости (не показан). Чтобы предотвращать бесполезные выводы сжатого воздуха и омывающей жидкости в попытке удалять неудаляемое постороннее вещество, модуль 31 обнаружения накоплений использует изображение неудаляемого вещества в качестве изображения с маской во время обнаружения накоплений. В нижеприведенном описании, изображение с маской, используемое посредством модуля 31 обнаружения накоплений, упоминается как "маска без изменений". После выполнения конкретных типов обработки изображений, таких как обработка обнаружения краев, для фотографического изображения, модуль 31 обнаружения накоплений использует маску без изменений, с тем чтобы обеспечивать то, что накопление не обнаруживается из области изображения, маскированной посредством маски без изменений. Маска без изменений формируется посредством модуля 35 формирования изображений с маской.
[0022] Модуль 32 выбора устройства выбирает либо воздушный насос 6, либо омывающий насос 7 в качестве модуля удаления накоплений, который должен быть использован для того, чтобы удалять (продувать воздухом или смывать) накопление, обнаруженное посредством модуля 31 обнаружения накоплений, с фотографической линзы. В ответ на информацию накопления, вводимую в него из модуля 31 обнаружения накоплений или модуля 34 определения удаления, модуль 32 выбора устройства выводит информацию, связанную с выбранным модулем удаления накоплений, в модуль 33 вывода управляющих сигналов. Модуль 32 выбора устройства выбирает модуль удаления накоплений на основе числа A раз, когда операция удаления выполнена с помощью сжатого воздуха посредством активации воздушного насоса 6, и числа B раз, когда операция удаления выполнена посредством активации омывающего насоса 7. Число A раз и число B раз сохраняются в RAM 10, и эта информация в RAM 10 совместно используется посредством модуля 32 выбора устройства и модуля 34 определения удаления. Следует отметить, что число A раз и число B раз могут быть инициализированы, когда накопление обнаруживается посредством модуля 31 обнаружения накоплений.
[0023] Модуль 33 вывода управляющих сигналов формирует управляющий сигнал, который должен запрашивать работу модуля удаления накоплений, выбранного посредством модуля 32 выбора устройства, и выводит управляющий сигнал в модуль 5 управления очисткой. Управляющий сигнал включает в себя информацию, связанную с модулем удаления накоплений, выбранным посредством модуля 32 выбора устройства, и информацию, указывающую величины управления, такие как интенсивность очистки и длительность очистки.
[0024] После того как модуль 5 управления очисткой завершает функциональное управление для воздушного насоса 6 или омывающего насоса 7, модуль 34 определения удаления выполняет определение в отношении того, удалено (продуто воздухом или смыто) или нет накопление с фотографической линзы. Фотографические изображения вводятся, по одному кадру за раз, в модуль 34 определения удаления из камеры 1. Сигнал завершения операции также вводится в модуль 34 определения удаления из модуля 5 управления очисткой.
[0025] После того как сигнал завершения операции, предоставленный посредством модуля 5 управления очисткой, вводится в него, модуль 34 определения удаления формирует разностное изображение, выражающее разность между фотографическим изображением, захваченным до операции удаления, и фотографическим изображением, захваченным после операции удаления, и выполняет определение на основе разностного изображения в отношении того, удалено (продуто воздухом или смыто) или нет накопление. Если определяется то, что накопление не удалено, модуль 34 определения удаления увеличивает число раз, когда активирован модуль удаления накоплений, который выполняет операцию удаления, и выводит информацию накопления, вводимую в него из модуля 31 обнаружения накоплений, в модуль 32 выбора устройства. После приема информации накопления, выводимой из модуля 34 определения удаления, модуль 32 выбора устройства выбирает модуль удаления накоплений на основе увеличенного числа раз и выводит информацию, связанную с выбранным модулем удаления накоплений, в модуль 33 вывода управляющих сигналов.
[0026] Модуль 35 формирования изображений с маской формирует или обновляет маску без изменений. В ответ на запрос на формирование маски без изменений, выданный посредством модуля 32 выбора устройства, модуль 35 формирования изображений с маской получает изображение, захваченное после операции удаления из модуля 34 определения удаления, и формирует или обновляет маску без изменений на основе такого полученного изображения. Маска без изменений, сформированная так, как описано выше, затем сохраняется на носителе хранения данных, таком как RAM 10.
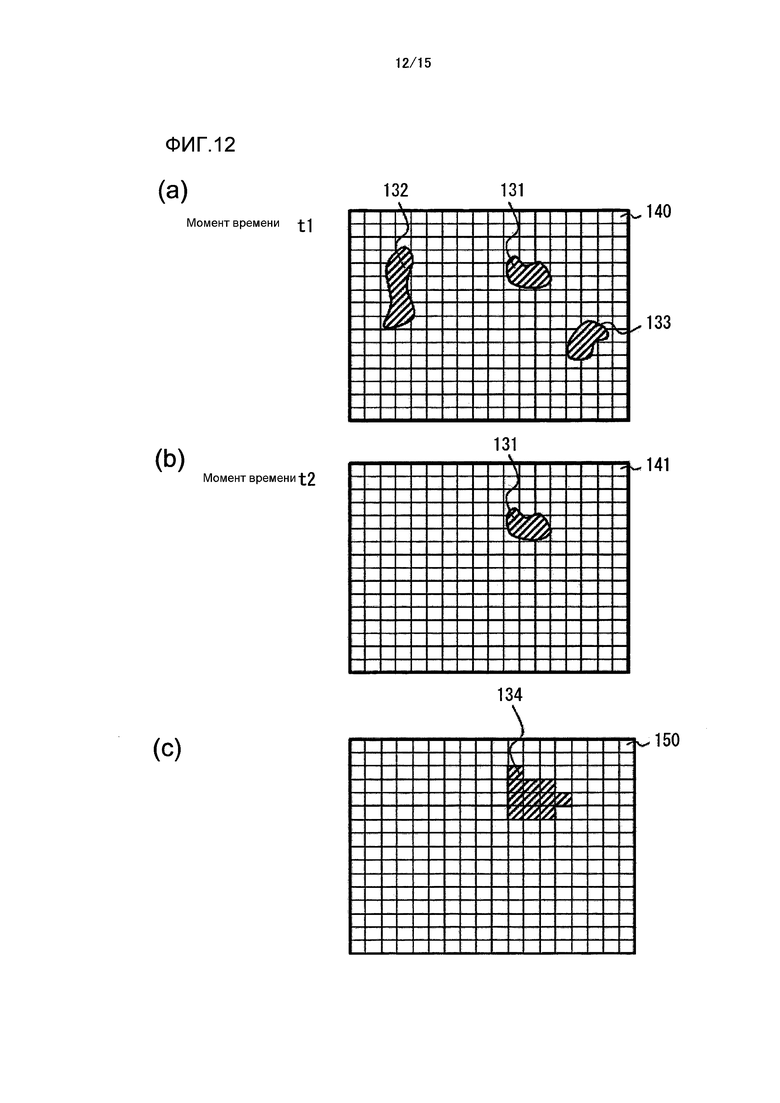
[0027] Ниже описывается в отношении примера, представленного на фиг. 12(a)-12(c), операция, выполняемая для целей формирования маски без изменений. Фиг. 12(a) показывает то, что накопление 131, накопление 132 и накопление 133 обнаруживаются в изображении 140, снятом в момент t1 времени до операции очистки. Посредством последующей операции очистки, удаляются накопление 132 и накопление 133 из числа вышеуказанных накоплений. Как результат, только накопление 131 остается на линзе в момент t2 времени после операции очистки, как указывает изображение 141 на фиг. 12(b). Модуль 35 формирования изображений с маской формирует маску 150 без изменений, к примеру, такую, как показано на фиг. 12(c), на основе изображения 141, снятого в момент t2 времени. Маска 150 без изменений хранит информацию относительно области 134 без изменений в позиции, соответствующей оставшемуся накоплению 131. Следует отметить, что разрешение маски 150 без изменений может быть ниже разрешения изображения 140 и изображения 141. Посредством понижения разрешения для маски 150 без изменений, может эффективнее использоваться область хранения, и может уменьшаться продолжительность для обработки, выполняемой посредством использования маски без изменений.
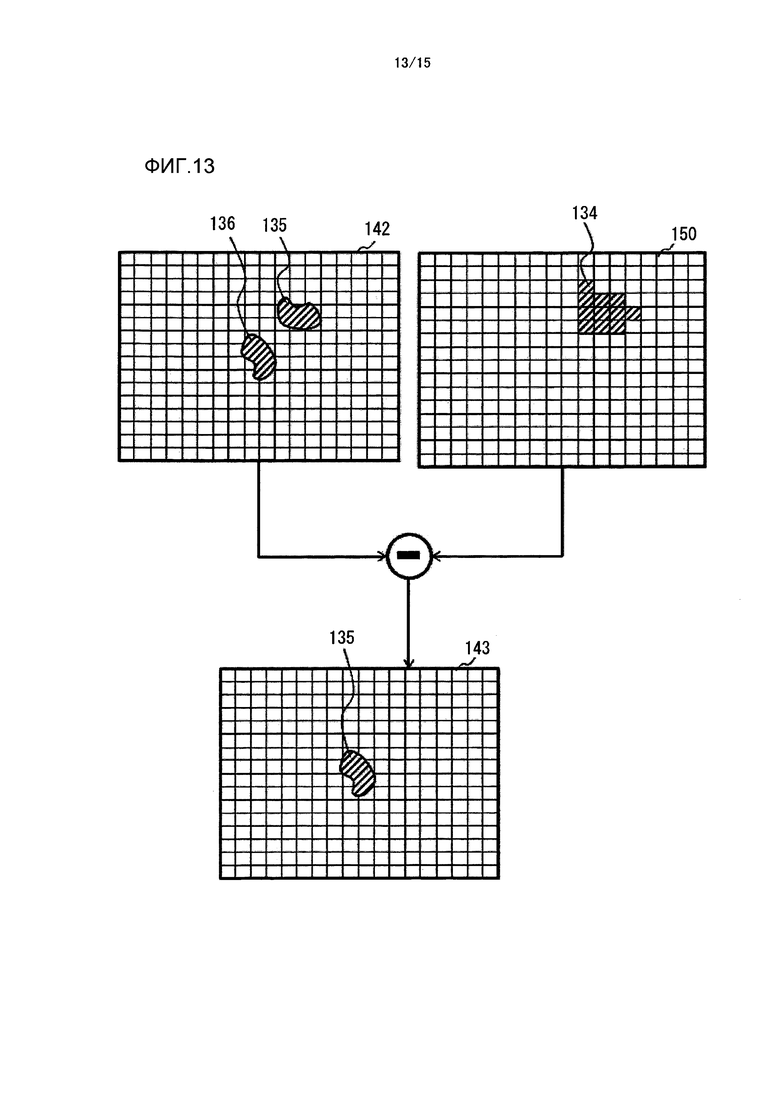
[0028] Далее поясняется в отношении примера, представленного на фиг. 13, способ, при котором используется маска без изменений. Фиг. 13 показывает изображение 142, захваченное в момент t3 времени, в который обнаруживаются накопление 135 и накопление 136. Маска 150 без изменений сформирована во время предыдущей операции очистки. В этом случае CPU 12 указывает область, которая совпадает с областью накопления в изображении 142, но не совпадает с областью без изменений в маске 150 без изменений (эта область упоминается как "область накопления после применения маски без изменений"). Например, CPU может выполнять растровое сканирование изображения с началом в верхнем левом углу изображения и может регистрировать каждый пиксел, содержащийся в области накопления и не содержащийся в области без изменений, в качестве части области накопления после применения маски без изменений. Область накопления после применения маски без изменений указывает область, которую охватывает новое оседающее накопление.
[0029] Фиг. 5 представляет блок-схему последовательности операций способа, связанную с модулем 311 обнаружения капель воды днем. На этапе S3110 CPU 12 формирует краевое изображение посредством выполнения обработки обнаружения краев текущего уровня техники для фотографического изображения, выводимого посредством камеры 1. На этапе S3111 CPU 12 извлекает пикселы с низкой интенсивностью края и в силу этого выражающие размытый край в краевом изображении, сформированном на этапе S3110. CPU 12 извлекает края, включенные в краевое изображение, имеющие интенсивность края, равную или превышающую предварительно определенное пороговое значение Th1 и равную или меньшую предварительно определенного порогового значения Th2. Принцип в основе этой обработки заключается в том, что когда окружающая среда является яркой, к примеру, днем, капля воды выражается как слабый край в краевом изображении. На этапе S3112 CPU 12 использует маску без изменений, сформированную посредством модуля 35 формирования изображений с маской, в сочетании с результатами извлечения, полученными посредством этапа S3111. На этапе S3113 CPU 12 выводит результаты извлечения, полученные посредством использования маски без изменений в сочетании с начальными результатами извлечения из этапа S3111, в качестве накопления капель воды.
[0030] Фиг. 6 представляет блок-схему последовательности операций способа, связанную с модулем 312 обнаружения капель воды ночью. Принцип работы модуля 312 обнаружения капель воды ночью заключается в том, что когда транспортное средство едет в темноте, к примеру, ночью, свет передних фар и т.п. транспортного средства позади рассматриваемого транспортного средства с большой вероятностью должен отражаться или преломляться в капле воды, оседающей на фотографической линзе, и капля воды в силу этого выражается как светящаяся точка в фотографическом изображении. На этапе S3120 CPU 12 извлекает такую светящуюся точку в фотографическом изображении, выводимом посредством камеры 1. На этапе S3121 CPU 12 использует маску без изменений, сформированную посредством модуля 35 формирования изображений с маской, в сочетании с результатами извлечения, полученными посредством этапа S3120. На этапе S3122 CPU выводит результаты извлечения, полученные посредством использования маски без изменений в сочетании с начальными результатами извлечения из этапа S3120, в качестве накопления капель воды.
[0031] Фиг. 7 представляет блок-схему последовательности операций способа, связанную с модулем 34 определения удаления. На этапе S340 CPU 12 выполняет определение в отношении того, введена или нет информация накопления из модуля 31 обнаружения накоплений. До тех пор, пока не будет введена информация накопления, CPU 12 многократно выполняет обработку на этапе S340, и когда введена информация накопления, он переходит к выполнению обработки на этапе S341.
[0032] На этапе S341 CPU 12 выполняет определение в отношении того, введен или нет сигнал завершения операции из модуля 5 управления очисткой. CPU 12 многократно выполняет обработку на этапе S341 до тех пор, пока не будет введен сигнал завершения операции, и когда введен сигнал завершения операции, он переходит к выполнению обработки на этапе S342.
[0033] На этапе S342 CPU 12 увеличивает число раз (число A раз или число B раз), когда активирован модуль удаления накоплений, выбранный в данный момент посредством модуля 32 выбора устройства (т.е. модуль удаления накоплений, который завершает операцию удаления).
[0034] На этапе S343 CPU 12 получает последнее фотографическое изображение, захваченное после операции удаления из камеры 1, и сохраняет фотографическое изображение в RAM 10. На этапе S344 CPU 12 формирует разностное изображение, представляющее разность между фотографическим изображением, захваченным после операции удаления, полученным посредством этапа S343, и фотографическим изображением, захваченным перед операцией удаления.
[0035] На этапе S345 CPU 12 выполняет определение в отношении того, включается или нет изображение неудаленных накоплений в разностное изображение, сформированное на этапе S344. Если положительное определение выполнено на этапе S345, т.е. если разностное изображение включает в себя изображение неудаленного накопления, CPU 12 переходит к выполнению обработки на этапе S346. С другой стороны, если отрицательно определение выполнено на этапе S345, он переходит к выполнению обработки на этапе S340.
[0036] На этапе S346 CPU 12 выполняет определение относительно типа каждого удаляемого накопления. CPU 12 определяет тип каждого накопления на основе изменения яркости пиксельного кластера, представляющего накопление, наблюдаемое в рабочем режиме после удаления, относительно рабочего режима перед удалением, размера или формы накопления, числа A раз, числа B раз, конкретного типа модуля удаления накоплений, активированного последним, и т.п. Например, накопление, удаленное или продемонстрировавшее изменение своей формы в результате операции удаления, выполняемой посредством воздушного насоса 6, по меньшей мере, один раз, должно определяться в качестве капли воды. Накопление, которое первоначально остается неудаляемым даже посредством выполнения операции удаления три раза посредством воздушного насоса 6, и удалено или демонстрирует изменение своей формы в результате операции удаления, по меньшей мере, один раз посредством омывающего насоса 7, должно определяться в качестве грязи. CPU 12 может выводить информацию типа накопления в модуль 5 управления очисткой в качестве величины управления в управляющем сигнале.
[0037] На этапе S347 CPU 12 выводит информацию накопления, вводимую в него на этапе S340, в модуль 32 выбора устройства. Затем CPU 12 переходит к выполнению обработки на этапе S341.
[0038] Фиг. 8 представляет блок-схему последовательности операций способа, связанную с модулем 32 выбора устройства. Блок-схема последовательности операций способа, представленная на фиг. 8, показывает пример обработки, выполняемой, когда модуль 32 выбора устройства выбирает модуль удаления накоплений с приоритетом воздушному насосу 6.
[0039] На этапе S321 CPU 12 выполняет определение в отношении того, введена или нет информация накопления из модуля 31 обнаружения накоплений или модуля 34 определения удаления на этапе S347 на фиг. 7. Информация накопления вводится из модуля 31 обнаружения накоплений, когда накопление обнаруживается посредством модуля 31 обнаружения накоплений. Помимо этого, информация накопления вводится из модуля 34 определения удаления, когда модуль 34 определения удаления определяет на этапе S345 то, что изображение неудаленного накопления включается в разностное изображение, т.е. модуль 34 определения удаления определяет то, что накопление остается неудаляемым. CPU 12 многократно выполняет обработку на этапе S321 до тех пор, пока не будет введена информация накопления не в модуль 32 выбора устройства. После того как информация накопления введена в модуль 32 выбора устройства, CPU 12 переходит к выполнению обработки на этапе S322.
[0040] На этапе S322 CPU 12 выполняет определение в отношении того, равно или меньше либо нет число A раз, сохраненное в RAM 10, предварительно определенного значения AL (например, AL=3). При выполнении положительного определения на этапе S322, CPU 12 переходит к выполнению обработки на этапе S323, тогда как при выполнении отрицательного определения на этапе S322, он переходит к выполнению обработки на этапе S324.
[0041] На этапе S323 CPU 12 выбирает воздушный насос 6 в качестве модуля удаления накоплений и активирует модуль 33 вывода управляющих сигналов таким образом, чтобы выводить управляющий сигнал, запрашивающий работу воздушного насоса 6, в модуль 5 управления очисткой. Когда обработка на этапе S323 завершена, CPU 12 переходит к выполнению обработки на этапе S321. Модуль 5 управления очисткой, после приема управляющего сигнала из модуля 33 вывода управляющих сигналов, вводимого в него, активирует воздушный насос 6 при операции удаления и, после операции удаления, выводит сигнал завершения операции в модуль 34 определения удаления.
[0042] На этапе S324 CPU 12 выполняет определение в отношении того, равно или меньше либо нет число B раз, сохраненное в RAM 10, предварительно определенного значения BL (например, BL=1). При выполнении положительного определения на этапе S324, CPU 12 переходит к выполнению обработки на этапе S325, тогда как при выполнении отрицательного определения на этапе S324, он переходит к выполнению обработки на этапе S326.
[0043] На этапе S325 CPU 12 выбирает омывающий насос 7 в качестве модуля удаления накоплений и активирует модуль 33 вывода управляющих сигналов таким образом, чтобы выводить управляющий сигнал, запрашивающий работу омывающего насоса 7, в модуль 5 управления очисткой. Когда обработка на этапе S325 завершена, CPU 12 переходит к выполнению обработки на этапе S321. Модуль 5 управления очисткой, после приема управляющего сигнала из модуля 33 вывода управляющих сигналов, вводимого в него, активирует омывающий насос 7 при операции удаления и, после операции удаления, выводит сигнал завершения операции в модуль 34 определения удаления.
[0044] На этапе S326 модуль 35 формирования изображений с маской активируется для формирования маски без изменений. Когда обработка на этапе S326 завершена, CPU 12 переходит к выполнению обработки на этапе S321.
[0045] Следующие преимущества обеспечиваются первым вариантом осуществления, описанным выше.
Бортовое устройство 100 включает в себя модуль 2 управления. Модуль 2 управления выводит управляющий сигнал в модуль 5 управления очисткой, который управляет воздушным насосом 6 и омывающим насосом 7 для удаления накопления, оседающего на фотографической линзе в камере 1. Модуль 2 управления включает в себя модуль 31 обнаружения накоплений, который обнаруживает накопление, оседающее на фотографической линзе, на основе фотографического изображения, выводимого из камеры 1, модуль 32 выбора устройства, который выбирает один или более модулей удаления накоплений из множества модулей удаления накоплений, модуль 34 определения удаления, который выполняет определение на основе фотографического изображения в отношении того, удалено или нет накопление с фотографической линзы до операции удаления, выполняемой посредством одного или более модулей удаления накоплений, выбранных посредством модуля 32 выбора устройства, и модуль 33 вывода управляющих сигналов, который выводит управляющий сигнал, который включает в себя, по меньшей мере, информацию, связанную с одним или более модулей удаления накоплений, выбранных посредством модуля 32 выбора устройства, в модуль 5 управления очисткой. Модуль 32 выбора устройства выбирает один или более модулей удаления накоплений на основе числа A раз и числа B раз, указывающего число раз, когда операция удаления выполнена посредством активации конкретного модуля удаления накоплений из множества модулей удаления накоплений, когда информация накопления вводится из модуля 31 обнаружения накоплений или модуля 34 определения удаления посредством этапа S321, т.е. когда модуль 31 обнаружения накоплений обнаруживает накопление, оседающее на фотографической линзе, или когда модуль 34 определения удаления определяет то, что накопление не удалено с фотографической линзы. Согласно управлению, выполняемому посредством модуля 2 управления в первом варианте осуществления настоящего изобретения, имеющего такую конструкцию, как описано выше, фотографическая линза в бортовой камере может очищаться оптимальным способом.
[0046] Модуль 2 управления дополнительно включает в себя модуль 35 формирования изображений с маской, который, если модуль 34 определения удаления определяет то, что накопление не удалено с фотографической линзы даже после того, как выполнена операция удаления посредством активации каждого из множества из модулей удаления накоплений предварительно определенное число раз, заданное в соответствии с конкретным модулем удаления накоплений, формирует изображение неудаленного накопления в качестве маски без изменений и сохраняет маску без изменений в RAM 10. Накопление, сохраненное в качестве маски без изменений в RAM 10, не рассматривается в качестве цели обнаружения посредством модуля 31 обнаружения накоплений. За счет этих мер предотвращается повторное обнаружение царапины на линзе, накопления, оседающего на светоэкранирующей пластине 1a и т.п., которые не могут удаляться посредством модулей удаления накоплений, посредством модуля 31 обнаружения накоплений, и в силу этого постоянно не выполняется необязательная операция очистки.
[0047] Когда число A раз, когда воздушный насос 6 активирован при операции удаления, равно или меньше предварительно определенного значения AL ("Да" на этапе S322 на фиг. 8), модуль 32 выбора устройства в модуле 2 управления выбирает воздушный насос 6 (этап S323). Когда число A раз, когда воздушный насос 6 активирован при операции удаления, превышает предварительно определенное значение AL ("Нет" на этапе S322 на фиг. 8), и число B раз, когда омывающий насос 7 активирован при операции удаления, равно или меньше предварительно определенного значения BL ("Да" на этапе S324), он выбирает омывающий насос 7 (этап S325). Когда число A раз, когда воздушный насос 6 активирован при операции удаления, превышает предварительно определенное значение AL ("Нет" на этапе S322), и число B раз, когда омывающий насос 7 активирован при операции удаления, превышает предварительно определенное значение BL ("Нет" на этапе S324), модуль 35 формирования изображений с маской сохраняет изображение всех неудаленных накоплений в RAM 10. За счет этих мер, накопления могут удаляться посредством идентификации различных типов накоплений, например, накопление, удаляемое посредством операции удаления, выполняемой посредством воздушного насоса 6, представляет собой каплю воды и т.п., и накопление, удаляемое посредством операции удаления, выполняемой посредством омывающего насоса 7, представляет собой грязь и т.п. Фиг. 14 представляет таблицу, указывающую конкретные типы устройств для очистки (устройство продувки воздухом, стеклоомыватель, стеклоочиститель), и то, могут или нет различные типы накоплений (капли воды, грязь, пятна от воды и царапины на линзе) удаляться посредством этих устройств для очистки. Посредством активации конкретного устройства для очистки и верификации результатов операции, может быть примерно определен тип целевого накопления. Посредством выполнения статистической обработки для этой информации и с использованием результатов обработки при управлении с обратной связью, число A раз и число B раз могут регулироваться таким образом, чтобы соответствовать предпочтениям отдельного пользователя.
[0048] ВТОРОЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Фиг. 9 является блок-схемой, связанной с бортовым устройством, осуществляемым во втором варианте осуществления. Бортовое устройство 200 отличается от бортового устройства 100 в первом варианте осуществления тем, что оно включает в себя стеклоочиститель 14, который вытирает фотографическую линзу в камере 1, и модуль 13 приведения в действие стеклоочистителя, который приводит в действие стеклоочиститель 14. Модуль 55 управления очисткой, который является эквивалентным модулю 5 управления очисткой в первом варианте осуществления, дополнительно управляет работой модуля 13 приведения в действие стеклоочистителя, помимо операций воздушного насоса 6 и омывающего насоса 7. С помощью стеклоочистителя 14 стойкое накопление, к примеру, пятно от воды, которое не может удаляться легко с помощью омывающей жидкости, может относительно просто вытираться с фотографической линзы. Модуль 55 управления очисткой выводит сигнал завершения операции в модуль 34 определения удаления, когда также завершается операция удаления, выполняемая посредством модуля 13 приведения в действие стеклоочистителя.
[0049] Фиг. 10 является блок-схемой управления, связанной с управлением, выполняемым для бортового устройства во втором варианте осуществления. Блок-схема управления на фиг. 10 отличается от блок-схемы управления на фиг. 4 тем, что она включает в себя модуль 52 управления, модуль 55 управления очисткой и модуль 36 выбора устройства вместо модуля 2 управления, модуля 5 управления очисткой и модуля 32 выбора устройства. Следует отметить, что идентичные ссылочные позиции назначаются модулям, активируемым при обработке, аналогичной обработке на блок-схеме управления на фиг. 4, с тем чтобы устранять необходимость их повторного пояснения.
[0050] Модуль 36 выбора устройства выбирает модуль удаления накоплений из воздушного насоса 6, омывающего насоса 7 и модуля 13 приведения в действие стеклоочистителя на основе числа A раз, когда активирован воздушный насос 6, числа B раз, когда активирован омывающий насос 7, и числа C раз, когда активирован модуль 13 приведения в действие стеклоочистителя.
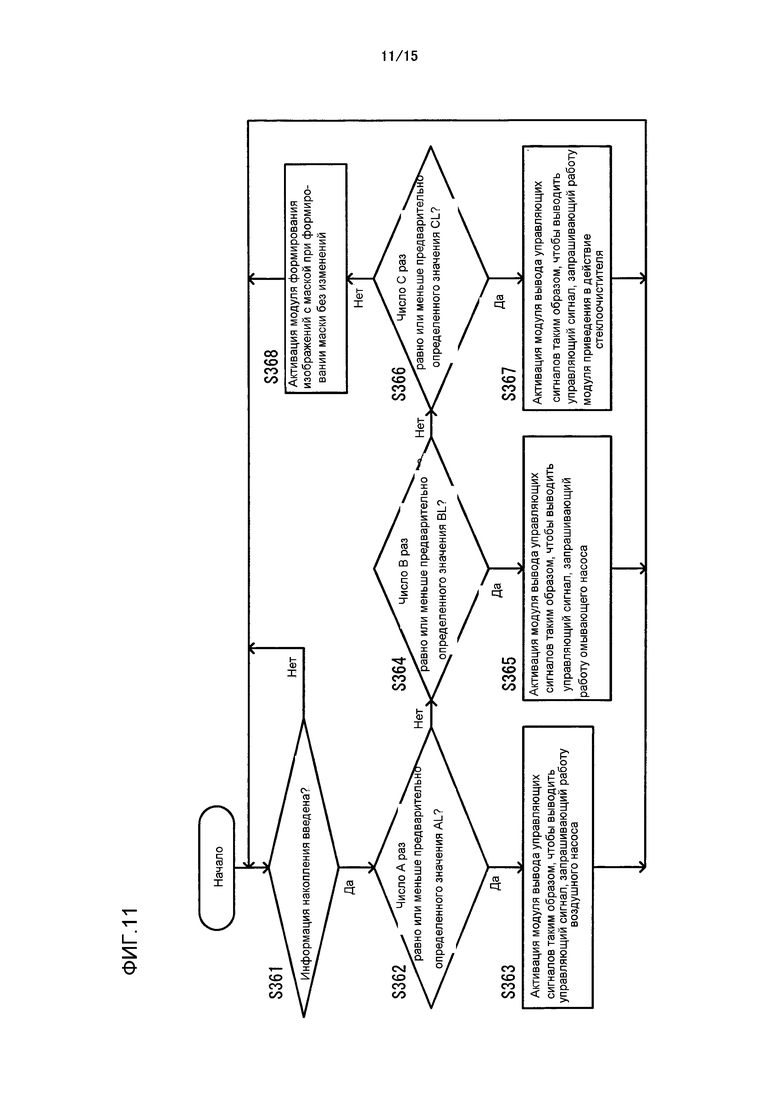
[0051] Фиг. 11 представляет блок-схему последовательности операций способа обработки, связанной с модулем 36 выбора устройства, которая выполняется посредством модуля 52 управления. Обработка, показанная на фиг. 11, включает в себя обработку, связанную с модулем 13 приведения в действие стеклоочистителя, выполняемым на этапе S366 и на этапе S367.
[0052] На этапе S361 на фиг. 11 CPU 12 выполняет обработку, аналогичную обработке на этапе S321 на фиг. 8. На этапе S362 на фиг. 11 CPU 12 выполняет обработку, аналогичную обработке на этапе S322 на фиг. 8. При выполнении положительного определения на этапе S362 CPU 12 переходит к выполнению обработки на этапе S363, тогда как при выполнении отрицательного определения на этапе S362 он переходит к выполнению обработки на этапе S364. На этапе S363 на фиг. 11 CPU 12 выполняет обработку, аналогичную обработке на этапе S323 на фиг. 8.
[0053] Определение, выполняемое на этапе S364 на фиг. 11, является аналогичным определению, выполняемому на этапе S324 на фиг. 8, за исключением того, что CPU 12 переходит к этапу S366, чтобы выполнять определение относительно модуля 13 приведения в действие стеклоочистителя при выполнении отрицательного определения на этапе S364. С другой стороны, если положительное определение выполнено на этапе S364, CPU 12 переходит к выполнению обработки на этапе S365, аналогично тому, как он переходит к этапу S325 после выполнения положительного определения на этапе S324 на фиг. 8. На этапе S365 на фиг. 11 CPU 12 выполняет обработку, аналогичную обработке, выполняемой на этапе S325 на фиг. 8.
[0054] На этапе S366 на фиг. 11 CPU 12 выполняет определение в отношении того, равно или меньше либо нет число C раз, сохраненное в RAM 10, предварительно определенного значения CL (например, CL=3). При выполнении положительного определения на этапе S366 CPU 12 переходит к выполнению обработки на этапе S367, тогда как при выполнении отрицательного определения на этапе S366, он переходит к выполнению обработки на этапе S368.
[0055] На этапе S367 на фиг. 11 CPU 12 выбирает модуль 13 приведения в действие стеклоочистителя в качестве модуля удаления накоплений и активирует модуль 33 вывода управляющих сигналов таким образом, чтобы выводить управляющий сигнал, запрашивающий работу модуля 13 приведения в действие стеклоочистителя, в модуль 55 управления очисткой. Когда обработка на этапе S367 завершена, CPU 12 переходит к выполнению обработки на этапе S361. Модуль 55 управления очисткой, после приема управляющего сигнала из модуля 33 вывода управляющих сигналов, вводимого в него, активирует модуль 13 приведения в действие стеклоочистителя и после операции удаления выводит сигнал завершения операции в модуль 34 определения удаления. Если накопление удаляется с фотографической линзы в камере 1 с помощью операции удаления, выполняемой посредством модуля 13 приведения в действие стеклоочистителя в ответ на управляющий сигнал, выводимый на этапе S367 на фиг. 11, модуль 34 определения удаления определяет на этапе S346 то, что накопление представляет собой пятно от воды, и т.п. Следует отметить, что обработка, аналогичная обработке на этапе S326 на фиг. 8, выполняется на этапе S368 на фиг. 11.
[0056] Следует отметить, что модуль 34 определения удаления выполняет определение на этапе S346 (см. фиг. 7) относительно типа удаленного накопления, аналогично первому варианту осуществления. CPU 12 определяет тип каждого удаленного накопления на основе изменения яркости пиксельного кластера, представляющего накопление, наблюдаемое в рабочем режиме после удаления, относительно рабочего режима перед удалением, размера или формы накопления, числа A раз, числа B раз, числа C раз, конкретного типа модуля удаления накоплений, активированного последним, и т.п. Например, он может идентифицировать накопление, которое остается неудаляемым даже после того, как воздушный насос 6 активирован при операции удаления три раза, и омывающий насос 7 активирован при операции удаления один раз или более, но удалено или демонстрирует изменение своей формы в результате операции удаления, выполняемой посредством активации модуля 13 приведения в действие стеклоочистителя один раз или более, в качестве пятна от воды.
[0057] Следующие преимущества обеспечиваются через второй вариант осуществления, описанный выше.
Бортовое устройство 200 включает в себя модуль 52 управления. Модуль 52 управления выводит управляющий сигнал в модуль 55 управления очисткой, который управляет воздушным насосом 6, омывающим насосом 7 и модулем 13 приведения в действие стеклоочистителя, все из которых активируются для того, чтобы удалять накопления, оседающие на фотографической линзе в камере 1. Модуль 52 управления включает в себя модуль 31 обнаружения накоплений, который обнаруживает накопление, оседающее на фотографической линзе, на основе фотографического изображения, выводимого из камеры 1, модуль 36 выбора устройства, который выбирает один или более модулей удаления накоплений из множества модулей удаления накоплений, модуль 34 определения удаления, который выполняет определение на основе фотографического изображения в отношении того, удалено или нет накопление с фотографической линзы до операции удаления, выполняемой посредством одного или более модулей удаления накоплений, выбранных посредством модуля 36 выбора устройства, и модуль 33 вывода управляющих сигналов, который выводит управляющий сигнал, который включает в себя, по меньшей мере, информацию, связанную с одним или более модулей удаления накоплений, выбранных посредством модуля 36 выбора устройства, в модуль 55 управления очисткой. Модуль 36 выбора устройства выбирает один или более модулей удаления накоплений на основе числа A раз, числа B раз и числа C раз, указывающего число раз, когда операция удаления выполнена посредством активации конкретного модуля удаления накоплений из множества модулей удаления накоплений, когда информация накопления вводится из модуля 31 обнаружения накоплений или модуля 34 определения удаления посредством этапа S361, т.е. когда модуль 31 обнаружения накоплений обнаруживает накопление, оседающее на фотографической линзе, либо когда модуль 34 определения удаления определяет то, что накопление не удалено с фотографической линзы. Согласно управлению, выполняемому посредством модуля 52 управления во втором варианте осуществления настоящего изобретения, имеющего такую конструкцию, как описано выше, фотографическая линза в бортовой камере может очищаться оптимальным способом.
[0058] Когда число A раз, когда воздушный насос 6 активирован при операции удаления, равно или меньше предварительно определенного значения AL ("Да" на этапе S362 на фиг. 11), модуль 36 выбора устройства в модуле 52 управления выбирает воздушный насос 6 (этап S363). Когда число A раз, когда воздушный насос 6 активирован при операции удаления, превышает предварительно определенное значение AL ("Нет" на этапе S362), и число B раз, когда омывающий насос 7 активирован при операции удаления, равно или меньше предварительно определенного значения BL ("Да" на этапе S364), он выбирает омывающий насос 7 (этап S365). Когда число A раз, когда воздушный насос 6 активирован при операции удаления, превышает предварительно определенное значение AL ("Нет" на этапе S362), число B раз, когда омывающий насос 7 активирован при операции удаления, превышает предварительно определенное значение BL ("Нет" на этапе S364), и число C раз, когда модуль 13 приведения в действие стеклоочистителя активирован при операции удаления, равно или меньше предварительно определенного значения CL ("Да" на этапе S366), выбирается модуль 13 приведения в действие стеклоочистителя. Когда число A раз, когда воздушный насос 6 активирован при операции удаления, превышает предварительно определенное значение AL ("Нет" на этапе S362), число B раз, когда омывающий насос 7 активирован при операции удаления, превышает предварительно определенное значение BL ("Нет" на этапе S364), и число C раз, когда модуль 13 приведения в действие стеклоочистителя активирован при операции удаления, превышает предварительно определенное значение CL, модуль 35 формирования изображений с маской сохраняет изображение всех неудаленных накоплений в RAM 10. За счет этих мер накопления могут удаляться посредством идентификации типа каждого накопления, как указано на фиг. 14, например, накопление, удаляемое с помощью операции удаления, выполняемой посредством воздушного насоса 6, представляет собой каплей воды и т.п., накопление, удаляемое с помощью операции удаления, выполняемой посредством омывающего насоса 7, представляет собой грязь и т.п., и накопление, удаляемое с помощью операции удаления посредством модуля 13 приведения в действие стеклоочистителя, представляет собой пятно от воды и т.п. Посредством выполнения статистической обработки для этой информации и с использованием результатов обработки при управлении с обратной связью, число A раз, число B раз и число C раз могут регулироваться согласно предпочтениям отдельного пользователя.
[0059] ТРЕТИЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Ниже описывается бортовое устройство, осуществляемое в третьем варианте осуществления. Бортовое устройство, осуществляемое в этом варианте осуществления, практически идентичное бортовому устройству в первом варианте осуществления, отличается только тем, что модуль 31 обнаружения накоплений активируется в то время, когда транспортное средство находится в состоянии движения.
[0060] Обработка распознавания изображений выполняется в третьем варианте осуществления с помощью LDW-функции, PED-функции, RSR-функции и IMD-функции, которые активируются в то время, когда транспортное средство находится в состоянии движения, и модуль 31 обнаружения накоплений активируется, когда транспортное средство движется со скоростью, равной или превышающей предварительно определенную скорость транспортного средства (например, 5 км/ч). Определение в отношении того, движется или нет транспортное средство со скоростью, равной или превышающей предварительно определенную скорость транспортного средства, выполняется с помощью датчика скорости транспортного средства (не показан).
[0061] Модуль 313 обнаружения грязи в модуле 31 обнаружения накоплений, например, допускает определение того, скапливается или нет грязь, посредством захвата изображений в два различных момента времени с помощью камеры 1, формирования разностного изображения с двумя изображениями и определения формы разностной области в разностном изображении.
[0062] В отношении фиг. 15, описывается способ, приспосабливаемый при формировании разностных изображений. Разностное изображение формируется посредством вычисления разности между последним фотографическим изображением и опорным изображением. Опорное изображение формируется на основе предыдущих фотографических изображений, предшествующих последнему фотографическому изображению и выводимых последовательно во времени из камеры 1.
[0063] Фиг. 15 показывает стрелку, указывающую прохождение времени, и над стрелкой моменты t0-t5 времени указываются в соответствии с частотой кадров камеры 1. Данные показывают фотографические изображения P0-P5, выводимые из камеры 1, соответственно, в моменты t0-t5 времени под стрелкой, указывающей прохождение времени.
[0064] Каждый раз, когда изображение из числа фотографических изображений P0-P5 выводится из камеры 1, изображение сохраняется в RAM 10. Предполагается, что сохранение фотографических изображений в RAM 10 начинается в момент t0 времени. А именно, в примере, представленном на фиг. 15, фотографическое изображение P0 представляет собой самое старое фотографическое изображение из числа фотографических изображений, сохраненных в RAM 10, а фотографическое изображение P5 представляет собой последнее фотографическое изображение.
[0065] Опорное изображение Qi формируется, когда новое фотографическое изображение Pi выводится из камеры 1 (например, в момент t5 времени) как выражается в (1) и (2) ниже, посредством использования фотографического изображения Pi-1, последним сохраненного RAM 10 (например, фотографического изображения P4), и опорного изображения Qi-1, используемого в качестве опорного изображения вплоть до момента, в который выводится фотографическое изображение Pi.
Qi=Pi-1 (когда i=1) (1),
Qi=k*Pi-1+(1-k)*Qi-1 (когда i≥2) (2).
k в выражении (2) является коэффициентом, принимающим значение в диапазоне 0<k≤1. Например, k=0,1.
[0066] Модуль 313 обнаружения грязи формирует разностное изображение, выражающее разность между фотографическим изображением, последним выведенным из камеры 1 (например, фотографическим изображением P5), и опорным изображением, сформированным в момент, в который выводится последнее фотографическое изображение (например, опорное изображение Q5).
[0067] Затем он выполняет определения относительно формы каждой разностной области, например, в отношении того, находится или нет ее реальный размер в пределах предварительно определенного диапазона, и того, находится или нет соотношение сторон разностной области в пределах предварительно определенного диапазона. Если форма разностной области удовлетворяет этим критериям, он определяет то, что накоплена грязь, и затем выводит информацию, указывающую позиции и число накоплений.
[0068] Конструкция, описанная выше, обеспечивает обнаружение накоплений в то время, когда транспортное средство движется со скоростью, равной или превышающей предварительно определенную скорость транспортного средства.
[0069] Варианты осуществления, описанные выше, предоставляют возможность следующих разновидностей.
(Разновидность 1) Модуль 32 или 36 выбора устройства может сразу выбирать множество модулей удаления накоплений. Например, он может выбирать такой вариант на этапе S325, что сначала выводится омывающая жидкость, а затем выводится сжатый воздух. Помимо этого, когда число A раз, когда операция удаления выполнена посредством воздушного насоса 6, превышает предварительно определенное значение AL, и число B раз, когда операция удаления выполнена посредством омывающего насоса 7, равно или меньше предварительно определенного значения BL, омывающая жидкость и сжатый воздух могут выводиться одновременно. Кроме того, множество модулей удаления накоплений не ограничивается воздушным насосом 6, омывающим насосом 7 и модулем 13 приведения в действие стеклоочистителя, и могут добавляться другие модули удаления накоплений, которые могут быть выбраны посредством модуля 32 выбора устройства или модуля 36 выбора устройства. В качестве альтернативы, любой из воздушного насоса 6, омывающего насоса 7 и модуля 13 приведения в действие стеклоочистителя может быть заменен посредством другого модуля удаления накоплений. Кроме того, воздушный насос 6 может иметь такую конфигурацию, в которой он также может выступать в качестве омывающего насоса 7.
(Разновидность 2) Камера 1 необязательно должна включать в себя светоэкранирующую пластину 1a.
(Разновидность 3) Модуль 311 обнаружения капель воды днем, модуль 312 обнаружения капель воды ночью, модуль 313 обнаружения грязи, модуль 314 обнаружения пятен от воды, и т.п., конфигурирующие модуль 31 обнаружения накоплений на фиг. 4 и фиг. 10, представляют просто примеры, и модуль 31 обнаружения накоплений необязательно должен включать в себя все эти модули обнаружения, либо он дополнительно может включать в себя модуль обнаружения царапин на линзе, допускающий обнаружение царапин на линзе.
[0070] Следует отметить, что варианты осуществления и разновидности, описанные выше, представляют просто примеры, и настоящее изобретение никоим образом не ограничивается этими примерами. Помимо этого, при условии, что признаки, отличающие настоящее изобретение, остаются неизменными, варианты осуществления и разновидности, описанные выше, могут приспосабливаться в комбинации. Например, третий вариант осуществления может приспосабливаться в комбинации с первым вариантом осуществления или вторым вариантом осуществления. Другими словами, модуль 31 обнаружения накоплений в первом варианте осуществления или во втором варианте осуществления может активироваться, когда транспортное средство движется со скоростью, равной или превышающей предварительно определенную скорость транспортного средства, как указано третьем варианте осуществления.
[0071] Раскрытие сущности следующей приоритетной заявки содержится по ссылке в данном документе:
Японская заявка на патент №2012-149868, поданная 3 июля 2012 года.
ПОЯСНЕНИЕ ССЫЛОК С НОМЕРАМИ
[0072] 1 - камера, 1a - светоэкранирующая пластина, 3 - модуль вывода предупреждений, 6 - воздушный насос, 7 - омывающий насос, 31 - модуль обнаружения накоплений, 33 - модуль вывода управляющих сигналов, 34 - модуль определения удаления, 35 - модуль формирования изображений с маской,
2 - модуль управления, 5 - модуль управления очисткой, 32 - модуль выбора устройства, 100 - бортовое устройство,
13 - модуль приведения в действие стеклоочистителя, 52 - модуль управления, 55 - модуль управления очисткой, 36 - модуль выбора устройства, 200 - бортовое устройство.




Изобретение относится к бортовому устройству. Бортовое устройство содержит модуль обнаружения накоплений, модуль выбора и модуль определения удаления. Модуль обнаружения накоплений обнаруживает накопление, оседающее на фотографической линзе, из фотографического изображения, выводимого из бортовой камеры. Модуль выбора выбирает модуль удаления накоплений, применяющий первый способ. Модуль определения удаления выполняет определение на основе фотографического изображения в отношении того, удалено или нет накопление с фотографической линзы с помощью операции удаления, выполняемой посредством модуля удаления накоплений, применяющего первый способ. Если модуль определения удаления определяет то, что накопление не удалено с фотографической линзы, модуль выбора выбирает модуль удаления накоплений, применяющий второй способ, отличающийся от модуля удаления накоплений, применяющего первый способ, на основе числа раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего первый способ. Достигается оптимальная мойка фотографической линзы бортовой камеры. 5 з.п. ф-лы, 15 ил.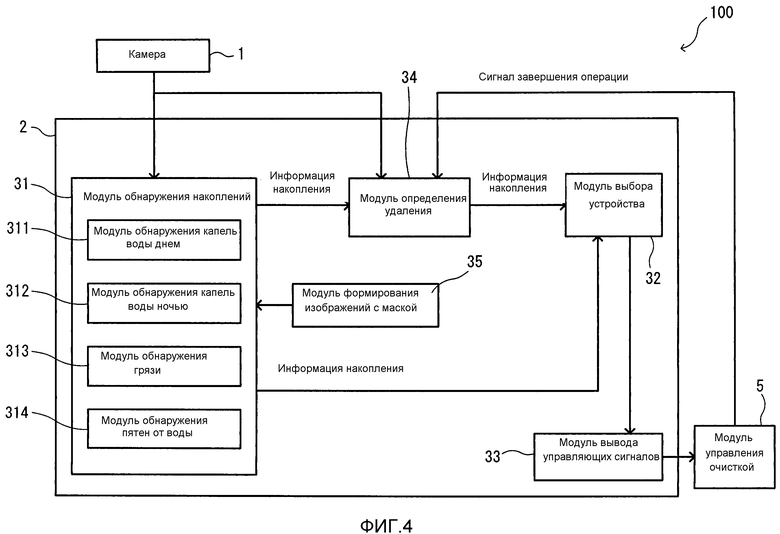
1. Бортовое устройство, которое выводит управляющий сигнал в модуль управления очисткой, который управляет модулями удаления накоплений, используемыми для того, чтобы удалять накопления, оседающие на фотографической линзе в бортовой камере, посредством применения множества способов, содержащее:
модуль обнаружения накоплений, который обнаруживает накопление, оседающее на фотографической линзе, из фотографического изображения, выводимого из бортовой камеры, когда скорость транспортного средства, вводимая в него, равна или превышает предварительно определенную скорость транспортного средства;
модуль выбора, который выбирает модуль удаления накоплений, применяющий первый способ, из модулей удаления накоплений, применяющих множество способов; и
модуль определения удаления, который выполняет определение на основе фотографического изображения в отношении того, удалено или нет накопление с фотографической линзы с помощью операции удаления, выполняемой посредством модуля удаления накоплений, применяющего первый способ, который выбран посредством модуля выбора, при этом
если модуль определения удаления определяет то, что накопление не удалено с фотографической линзы, модуль выбора выбирает модуль удаления накоплений, применяющий второй способ, отличающийся от модуля удаления накоплений, применяющего первый способ, на основе числа раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего первый способ.
2. Бортовое устройство по п. 1, дополнительно содержащее:
модуль хранения изображений с маской, который сохраняет, если модуль определения удаления определяет то, что накопление не удалено с фотографической линзы даже после того, как выполнена операция удаления посредством активации каждого из модулей удаления накоплений, применяющих множество способов, предварительно определенное множество раз, заданное в соответствии с каждым из модулей удаления накоплений, применяющих множество способов, изображение неудаленного накопления в качестве изображения с маской, при этом:
модуль обнаружения накоплений не рассматривает накопление, сохраненное в качестве изображения с маской в модуле хранения изображений с маской, в качестве цели обнаружения.
3. Бортовое устройство по п. 2, в котором
модуль удаления накоплений, применяющий первый способ, удаляет накопление посредством использования сжатого воздуха;
модуль удаления накоплений, применяющий второй способ, удаляет накопление посредством использования омывающей жидкости;
когда число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего первый способ, равно или меньше первого предварительно определенного значения, модуль выбора выбирает модуль удаления накоплений, применяющий первый способ;
когда число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего первый способ, превышает первое предварительно определенное значение, и число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего второй способ, равно или меньше второго предварительно определенного значения, модуль выбора выбирает модуль удаления накоплений, применяющий второй способ; и
когда число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего первый способ, превышает первое предварительно определенное значение, и число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего второй способ, превышает второе предварительно определенное значение, модуль хранения изображений с маской сохраняет изображение с маской.
4. Бортовое устройство по п. 3, в котором
модуль удаления накоплений, применяющий множество способов, дополнительно включает в себя модуль удаления накоплений, применяющий третий способ, который удаляет накопление посредством использования стеклоочистителя;
когда число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего первый способ, равно или меньше первого предварительно определенного значения, модуль выбора выбирает модуль удаления накоплений, применяющий первый способ;
когда число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего первый способ, превышает первое предварительно определенное значение, и число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего второй способ, равно или меньше второго предварительно определенного значения, модуль выбора выбирает модуль удаления накоплений, применяющий второй способ;
когда число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего первый способ, превышает первое предварительно определенное значение, число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего второй способ, превышает второе предварительно определенное значение, и число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего третий способ, равно или меньше третьего предварительно определенного значения, модуль выбора выбирает модуль удаления накоплений, применяющий третий способ; и
когда число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего первый способ, превышает первое предварительно определенное значение, число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего второй способ, превышает второе предварительно определенное значение, и число раз, когда операция удаления выполнена посредством активации модуля удаления накоплений, применяющего третий способ, превышает третье предварительно определенное значение, модуль хранения изображений с маской сохраняет изображение с маской.
5. Бортовое устройство по п. 3, в котором
модуль определения удаления дополнительно определяет тип накопления, удаляемого с помощью операции удаления, выполняемой посредством модуля удаления накоплений, выбранного посредством модуля выбора из модулей удаления накоплений, применяющих множество способов;
модуль определения удаления идентифицирует накопление, удаляемое с помощью операции удаления, выполняемой посредством модуля удаления накоплений, применяющего первый способ, в качестве накопления капель воды; и
модуль определения удаления идентифицирует накопление, удаляемое с помощью операции удаления, выполняемой посредством модуля удаления накоплений, применяющего второй способ, в качестве накопления грязи.
6. Бортовое устройство по п. 4, в котором
модуль определения удаления дополнительно определяет тип накопления, удаляемого с помощью операции удаления, выполняемой посредством модуля удаления накоплений, выбранного посредством модуля выбора из модулей удаления накоплений, применяющих множество способов;
модуль определения удаления идентифицирует накопление, удаляемое с помощью операции удаления, выполняемой посредством модуля удаления накоплений, применяющего первый способ, в качестве накопления капель воды;
модуль определения удаления идентифицирует накопление, удаляемое с помощью операции удаления, выполняемой посредством модуля удаления накоплений, применяющего второй способ, в качестве накопления грязи; и
модуль определения удаления идентифицирует накопление, удаляемое с помощью операции удаления, выполняемой посредством модуля удаления накоплений, применяющего третий способ, в качестве накопления пятен от воды.
| US 2011073142 A1, 31.03.2011 | |||
| СРЕДСТВО, ПОВЫШАЮЩЕЕ НЕСПЕЦИФИЧЕСКУЮ СОПРОТИВЛЯЕМОСТЬ ОРГАНИЗМА К БАКТЕРИАЛЬНЫМ ЭНДОТОКСИНАМ | 2007 |
|
RU2351351C1 |
| US 2010073492 A1, 25.03.2010 | |||
| WO 2010038223 A1, 08.04.2010. | |||

