ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области транспортных средств и области информационных и коммуникационных технологий, в частности к системе и способу оптимизации работы самосвала с помощью цифрового советчика водителю.
Представленное решение может быть использовано, по меньшей мере, в горнодобывающей, строительной и других отраслях промышленности, в которых используются самосвалы для выполнения различных видов работ.
УРОВЕНЬ ТЕХНИКИ
В патентной заявке US2020031371A1 (дата публикации 30.01.2020) раскрыт способ предоставления водителю транспортного средства предлагаемой корректировки вождения в реальном времени. Способ включает в себя получение одного или более прямых входов водителя (например, скорости нажатия педалей акселератора и тормоза, отклонения рулевого управления/угол поворота, промежуток времени между нажатием педалей акселератора/тормоза) от системы управления транспортным средством и получение данных датчика от системы датчиков транспортного средства. Данные датчиков могут включать данные датчиков транспортного средства и данные датчиков окружающей среды. Данные датчиков транспортного средства могут включать ток, напряжение, состояние заряда батареи, крутящий момент двигателя тягового привода, скорость двигателя, ток двигателя, температуру, крутящие моменты компонентов трансмиссии, передаточное число, поперечное и продольное ускорение/замедление транспортного средства, угол поворота рулевого управления, скорость вращения колес и т.д. Данные датчиков окружающей среды могут включать скорость транспортного средства и ограничение скорости на дороге, профиль маршрута (например, трехмерный профиль маршрута), пересечения и расположение светофоров, погодные условия, динамическое движение, информацию об окружающих транспортных средствах с помощью LIDAR или радаров. Способ включает определение прогнозируемого поведения водителя на основе прямых входов водителя и данных датчика. Кроме того, метод включает определение идеального поведения водителя на основе прямых входов водителя и данных датчика и определение разницы между прогнозируемым поведением водителя и идеальным поведением водителя. Метод также включает определение предлагаемой корректировки вождения на основе разницы в поведении. Кроме того, метод включает отправку инструкций для уведомления водителя о предложенной корректировке вождения для повышения эффективности и/или производительности транспортного средства.
В патентной заявке CN109887286A (дата публикации 14.06.2019) описано интеллектуальное вспомогательное средство управления грузовиком на основе облачной платформы рекомендаций по вождению с использованием информации о предстоящей дороге, информации о движении в режиме реального времени, метеорологической информации о погоде и информации об окружающей среде для обеспечения оптимального маршрута движения для грузовика, оптимальной крейсерской скорости и соответствующего снаряжения. Осуществляют напоминания об усталости от вождения, съезде на скоростную автомагистраль, эстакаде моста, туннельной дороге, участке поворота, руководства о прохождении участков, на которых часто происходят дорожно-транспортные происшествия, участков проезда через реку, участков с долгим спуском. В результате улучшается топливная экономичность, предотвращается усталость при вождении, повышается внимание водителя, снижается влияние риска при вождении.
В патенте US5913917A (дата публикации 22.06.1999) описаны способ и устройство для прогнозирования или оценки потребления топлива или энергии транспортным средством на выбранном маршруте поездки, где маршрут включает в себя множество дорожных сегментов. Расход топлива на каждом участке дороги оценивается с использованием информации об одной или более из следующих переменных: репрезентативная высота участка дороги; репрезентативный уклон участка дороги; расчетная средняя скорость транспортного средства на участке дороги; длина участка дороги; состояние участка дороги; состояние шин транспортного средства; ожидаемая плотность движения транспортного средства на участке дороги; применимые ограничения на эксплуатацию транспортного средства на участке дороги; ожидаемые погодные условия на участке дороги; аксессуары транспортного средства, которые будут использоваться; и информация о профиле водителя транспортного средства. Погодные условия по пути следования, такие как скорость и направление местного ветра, могут быть измерены и использованы для повышения точности прогнозируемого расхода топлива. Расход топлива может быть оценен изначально, может быть повторно оценен в пути, используя фактический расход топлива на уже пройденном участке маршрута, и может быть оценен для обратной поездки по тому же маршруту. Расход топлива может быть оценен, если маршрут изначально не задан. Потребляемое топливо может быть электрическим зарядом, бензином, керосином, природным газом, дизельным топливом или любым другим подобным топливом.
В патенте RU2488663C2 (дата публикации 27.07.2013) описан способ обеспечения инструкциями по эксплуатации водителя рабочей машины посредством обучающего интерфейса в кабине рабочей машины, определяющий перемещение рабочей машины между положением погрузки и положением разгрузки, которые находятся на определенном расстоянии друг от друга. Причем при осуществлении способа информируют водителя о событиях вдоль пути пробега, влияющих на эксплуатацию рабочей машины оптимальным образом в отношении конкретного параметра. Согласно первому предпочтительному примеру конкретный параметр касается вибраций, воздействующих на водителя во время работы, таких как вибрация всего тела (ВВТ или WBV, от английского - whole body vibrations). Согласно второму предпочтительному примеру конкретный параметр касается расхода энергии (например, расхода топлива). Рассчитывают величину расхода топлива в качестве функции пути и времени движения. Затем посредством конкретной рекомендации инструктируют водителя рабочей машины, как эксплуатировать рабочую машину после наступления этих событий оптимальным образом в отношении упомянутого конкретного параметра. Техническим результатом является усовершенствование условий эксплуатации рабочей машины на протяжении повторяющегося рабочего цикла.
В патентной заявке CN111311903A (дата публикации 19.06.2020) описан способ мониторинга состояния вождения транспортного средства, который включает в себя процесс получения порогового значения суждения и процесс мониторинга в реальном времени, которые работают синхронно; процесс получения порогового значения решения включает: s110: задание множества типов дорожной среды, получение текущего типа дорожной среды в соответствии с текущим положением транспортного средства и одновременное получение данных о вождении транспортного средства в множество моментов времени в пределах первой определенной временной ширины типа дорожной среды; s120: вычисление первого порогового значения и второго порогового значения, соответствующих типу дорожной обстановки, в соответствии с полученными данными вождения; процесс мониторинга в реальном времени включает в себя следующие шаги: s210: получение текущего типа дорожной среды в соответствии с текущим положением транспортного средства, определение того, имеет ли текущий тип дорожной среды соответствующее первое пороговое значение и второе пороговое значение, если да, то определение соответствующего первого порогового значения и второго порогового значения, и вход в S220; в противном случае, возврат к S210; s220: получение текущих данных о вождении транспортного средства, и вычисление соответствующего расхода масла на сто километров; s230: и оценивает взаимосвязь между текущим стокилометровым расходом топлива транспортного средства и первым пороговым значением и вторым пороговым значением, соответствующим текущему типу дорожной среды, выполняет соответствующее напоминание в соответствии с результатом суждения, и возвращается к S210.
Однако в данных решениях отсутствует получение данных мгновенного расхода топлива с помощью датчика мгновенного расхода топлива и определение с помощью методов машинного обучения оптимальных профилей прохождения маршрута на основании собранных данных телеметрии и датчика мгновенного расхода топлива самосвала с учетом факторов, влияющих на удельный расход топлива, отсутствует цифровой советчик, который выдает водителю самосвала, на основе текущих данных телеметрии и датчика мгновенного расхода топлива самосвала, рекомендации по режимам вождения в соответствии с виртуальной картой выдачи рекомендаций в зависимости от положения самосвала на цифровой карте маршрута и определенных оптимальных профилей прохождения маршрута с учетом факторов, влияющих на удельный расход топлива.
Техническая проблема, на решение которой направлено заявляемое изобретение, заключается в оптимизации работы самосвала с помощью цифрового советчика, который выдает водителю самосвала, на основе данных телеметрии и датчика мгновенного расхода топлива самосвала, рекомендации по режимам вождения в зависимости от положения самосвала на маршруте и оптимальных профилей прохождения маршрута с учетом факторов, влияющих на удельный расход топлива.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Технический результат совпадает с технической проблемой и заключается в оптимизации работы самосвала с помощью цифрового советчика, который выдает водителю самосвала, на основе данных телеметрии и датчика мгновенного расхода топлива самосвала, рекомендации по режимам вождения в зависимости от положения самосвала на маршруте и оптимальных профилей прохождения маршрута с учетом факторов, влияющих на удельный расход топлива. Также повышается точность и достоверность выдаваемых водителю рекомендаций по режимам вождения, достигается оптимизация удельного расхода топлива самосвала.
Указанный технический результат достигается за счёт того, что:
Система оптимизации работы самосвала с помощью цифрового советчика водителю содержит:
сервер;
бортовую вычислительную систему (БВС) самосвала, включающую, по меньшей мере:
- систему контроля телеметрии и датчик мгновенного расхода топлива самосвала;
- цифровой советчик;
причем с помощью сервера осуществляют построение цифровой карты маршрута движения самосвала с разбиением на элементарные участки, определяют оптимальные профили прохождения маршрута самосвала для каждого элементарного участка с помощью методов машинного обучения на основании собранных данных телеметрии и датчика мгновенного расхода топлива самосвала для каждого элементарного участка маршрута с учетом факторов, влияющих на удельный расход топлива, и создают виртуальную карту выдачи рекомендаций по элементарным участкам маршрута движения самосвала на основании определенных оптимальных профилей прохождения маршрута для каждого элементарного участка и построенной цифровой карты маршрута; и загружают в БВС цифровую карту маршрута движения самосвала и виртуальную карту выдачи рекомендаций по элементарным участкам маршрута;
и с помощью цифрового советчика выдают водителю самосвала в режиме реального времени, на основе текущих данных системы контроля телеметрии и датчика мгновенного расхода топлива самосвала, рекомендации по режимам вождения для каждого элементарного участка маршрута в соответствии с виртуальной картой выдачи рекомендаций по элементарным участкам маршрута в зависимости от положения самосвала на цифровой карте маршрута и определенных оптимальных профилей прохождения маршрута с учетом факторов, влияющих на удельный расход топлива.
В системе данные телеметрии самосвала могут включать, по меньшей мере, следующее: скорость, ускорение, торможение, загрузка, местоположение, данные диагностики двигателя.
В системе факторы, влияющие на удельный расход топлива, могут включать, по меньшей мере, следующее: режимы движения самосвала, которые предшествовали прохождению каждого элементарного участка маршрута, информация о профиле дороги, информация о маршруте, прогноз погоды, производственные показатели работы самосвала, загрузка самосвала, тип и модель самосвала, стиль вождения водителя.
В системе цифровой советчик может выдавать водителю самосвала рекомендации по режимам вождения путем визуализации или озвучивания.
В системе цифровой советчик может визуализировать места повышенного мгновенного расхода топлива на цифровой карте дорог.
Способ оптимизации работы самосвала с помощью цифрового советчика водителю включает следующие шаги:
осуществляют построение цифровой карты маршрута движения самосвала с разбиением на элементарные участки, определяют оптимальные профили прохождения маршрута самосвала для каждого элементарного участка с помощью методов машинного обучения на основании собранных данных телеметрии и датчика мгновенного расхода топлива самосвала для каждого элементарного участка маршрута с учетом факторов, влияющих на удельный расход топлива, и создают виртуальную карту выдачи рекомендаций по элементарным участкам маршрута движения самосвала на основании определенных оптимальных профилей прохождения маршрута для каждого элементарного участка и построенной цифровой карты маршрута;
загружают цифровую карту маршрута движения самосвала и виртуальную карту выдачи рекомендаций по элементарным участкам маршрута в бортовую вычислительную систему (БВС) самосвала;
цифровой советчик выдает водителю самосвала в режиме реального времени, на основе текущих данных телеметрии и датчика мгновенного расхода топлива самосвала, рекомендации по режимам вождения для каждого элементарного участка маршрута в соответствии с виртуальной картой выдачи рекомендаций по элементарным участкам маршрута в зависимости от положения самосвала на цифровой карте маршрута и определенных оптимальных профилей прохождения маршрута с учетом факторов, влияющих на удельный расход топлива.
В способе данные телеметрии самосвала могут включать, по меньшей мере, следующее: скорость, ускорение, торможение, загрузка, местоположение, данные диагностики двигателя.
В способе факторы, влияющие на удельный расход топлива, могут включать, по меньшей мере, следующее: режимы движения самосвала, которые предшествовали прохождению каждого элементарного участка маршрута, информация о профиле дороги, информация о маршруте, прогноз погоды, производственные показатели работы самосвала, загрузка самосвала, тип и модель самосвала, стиль вождения водителя.
В способе цифровой советчик может выдавать водителю самосвала рекомендации по режимам вождения путем визуализации или озвучивания.
В способе цифровой советчик может визуализировать места повышенного мгновенного расхода топлива на цифровой карте дорог.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Реализация изобретения будет описана в дальнейшем в соответствии с прилагаемыми чертежами, которые представлены для пояснения сути изобретения и никоим образом не ограничивают область изобретения.
Заявляемое изобретение проиллюстрировано фигурами 1-7, на которых изображены:
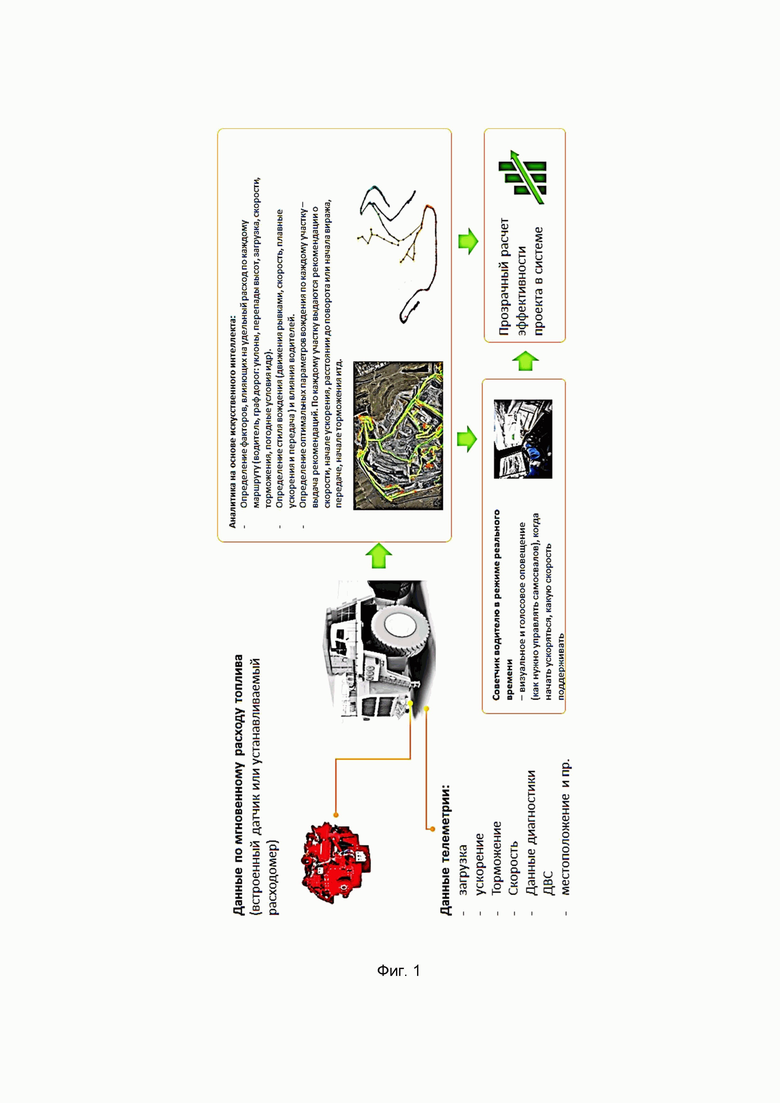
Фиг. 1 – иллюстрирует функциональную схему системы оптимизации работы самосвала с помощью цифрового советчика водителю.
Фиг. 1 – иллюстрирует архитектуру системы оптимизации работы самосвала с помощью цифрового советчика водителю.
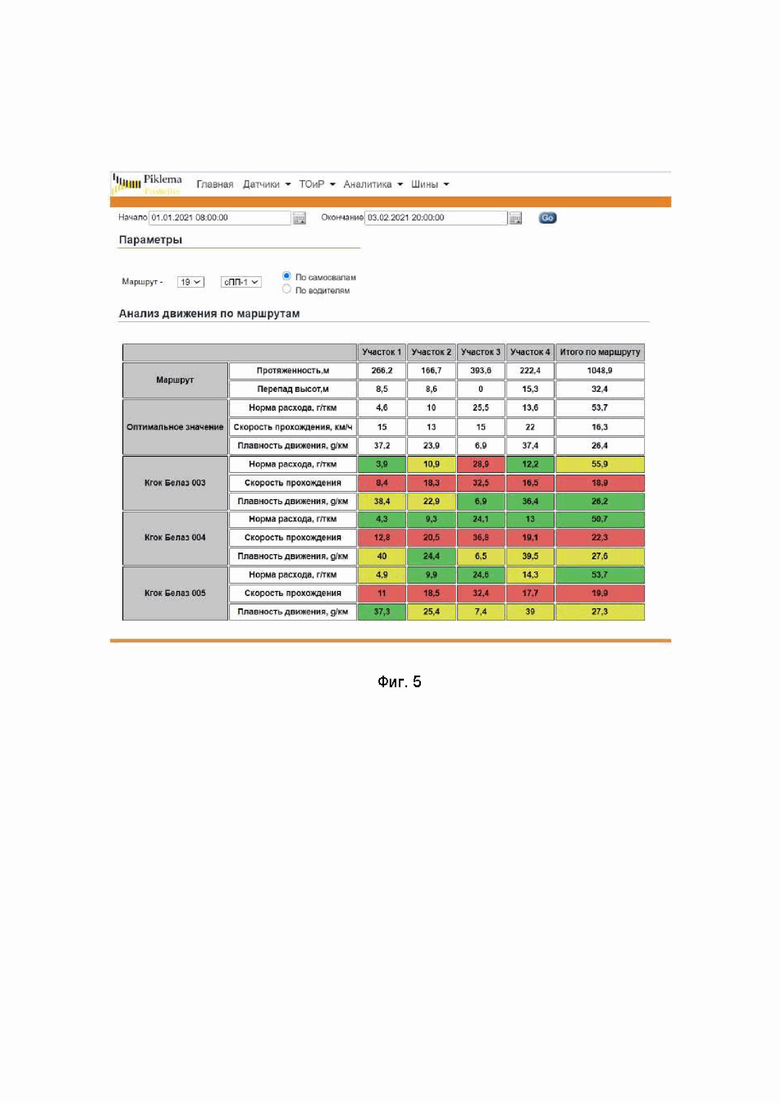
Фиг. 3-6 – иллюстрируют примеры отчетных форм, выдаваемых системой оптимизации работы самосвала с помощью цифрового советчика водителю.
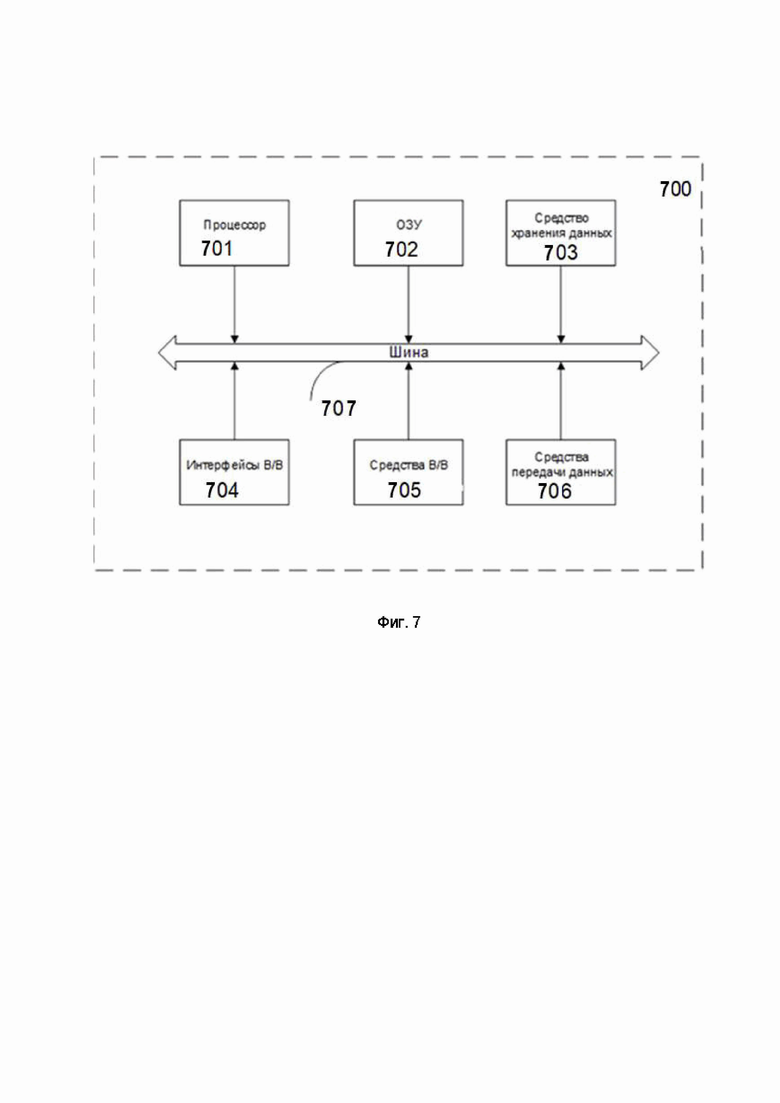
Фиг. 7 – иллюстрирует общую схему вычислительного устройства для реализации настоящего решения.
ДЕТАЛЬНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В приведенном ниже подробном описании реализации изобретения приведены многочисленные детали реализации, призванные обеспечить отчетливое понимание настоящего изобретения. Однако, квалифицированному в предметной области специалисту будет очевидно, каким образом можно использовать настоящее изобретение, как с данными деталями реализации, так и без них. В других случаях хорошо известные методы, процедуры и компоненты не были описаны подробно, чтобы не затруднять излишне понимание особенностей настоящего изобретения.
Кроме того, из приведенного изложения будет ясно, что изобретение не ограничивается приведенной реализацией. Многочисленные возможные модификации, изменения, вариации и замены, сохраняющие суть и форму настоящего изобретения, будут очевидными для квалифицированных в предметной области специалистов.
Система оптимизации работы самосвала с помощью цифрового советчика водителям предназначена для корректировки режимов движения самосвалов, например карьерных самосвалов, логистических самосвалов, строительных самосвалов и др. Корректируют режимы движения, например, карьерных самосвалов для конкретных горнотехнических и горно-геологических условий во время работы карьерных самосвалов на карьере, логистических самосвалов для конкретных условий маршрута во время перевозки различных грузов, путем выдачи рекомендаций водителям самосвалов при движении по маршрутам в течение смены и контроля следующих параметров: оптимальный удельный расход топлива при движении с учетом загрузки, прогноза погоды, стиля вождения техникой и других параметров, которые влияют на удельный расход топлива. Методами машинного обучения осуществляют поиск оптимальных профилей прохождения маршрутов самосвалами для различных участков дорог, таких как технологические дороги, дороги общего пользования и др., построения цифровой карты дорог и виртуальной карты рекомендаций (подсказок) и выдают рекомендации водителям самосвалов для каждого участка дороги в виде конкретных параметров режимов движения, например, скорости, ускорения, начала разгона или торможения, с целью оптимизации удельного расхода топлива и тем самым оптимизации работы самосвала. При поиске оптимальных профилей прохождения маршрутов, включающих оптимальные режимы движения самосвалов (оптимальные для каждого из участков дороги режимы скорости, ускорения, торможения) и выдаче рекомендаций учитывают различные факторы, которые могут повлиять на расход топлива, например качество дорожного покрытия, прогноз погоды, режимы движения (ускорения, торможения и скоростные режимы) и производственные показатели работы самосвалов.
На Фиг. 1 приведена функциональная схема системы оптимизации работы самосвала с помощью цифрового советчика водителю.
Серверная программно-аппаратная часть системы предназначена для проведения математического моделирования и расчёта рекомендаций движения с помощью предиктивных моделей, формирования рекомендаций на основе прогнозной аналитики, а также визуализации влияния факторов на удельный расход топлива, анализа удельного расхода топлива по маршрутам, сообщений об ошибках движения для водителей, анализа соблюдения рекомендаций водителями самосвалов и построения отчетов. Обработка данных также может осуществляться с использованием облачных технологий. Данные телеметрии и данные по мгновенному расходу топлива передаются на сервер или в облако для построения цифровой карты дорог, проведения аналитики и построения предиктивных моделей с учетом различных факторов, которые влияют на удельный расход топлива, например, таких как режимы движения самосвала, которые предшествовали прохождению каждого элементарного участка маршрута, информация о профиле дороги (уклоны дороги, длина участка, продольные и поперечные нагрузки на подвеску, характеризующие качество дорожного полотна, неровности, координаты участка и др.), информация о маршруте, прогноз погоды, производственные показатели работы самосвала, загрузка самосвала, тип и модель самосвала, стиль вождения водителя и др. (Фиг. 1).
Бортовая программно-аппаратная часть системы предназначена для озвучивания или визуализации подсказок по рекомендованным режимам вождения водителям самосвалов с помощью цифрового советчика в режиме реального времени (Фиг. 1). Бортовая вычислительная система включает бортовое оборудование: бортовой компьютер с аналоговыми и дискретными входами для подключения к CAN интерфейсам техники, контроллер с программным обеспечением, GPS, а также громкоговоритель в кабине карьерного самосвала или HUD-дисплей для визуализации рекомендаций по режимам движения карьерного самосвала для различных участков маршрута, GPRS передатчик для синхронизации данных с сервером и передачей обновленных рекомендаций для участков маршрута. При отсутствии информации о мгновенном расходе топлива в CAN шине дополнительно устанавливается расходомер топлива.
Построение графа дорог происходит на основе GPS приемника при движении самосвалов. Для построения графа дорог и разбиения на элементарные участки используют методы кластеризации (математический метод определения параметров, относящихся к единой группе сгруппированных значений). Под элементарными участками подразумеваются участки, на которых на основе статистики необходимо изменять скоростной режим движения самосвала, например, изменять скоростной режим, начинать разгон или торможение.
Данные датчика скорости/скорость из GPS сравниваются при прохождении ключевых точек графа дорог с рекомендованными режимами движения для конкретной модели самосвала, учитывая качество дорог и степень загрузки техники. Для разных автосамосвалов и при разной загрузке разные скоростные режимы оптимальны, поэтому подсказки учитывают все значения, которые влияют на рекомендованную скорость.
Для построения модели расхода топлива используется градиентный бустинг. Все маршруты разбиваются на элементарные участки небольшой длины. Для каждого участка определяют различные геометрические параметры, например, длина, наклон, перепад высот, углы поворота между участками окружения. Также на сервер передают собираемые параметры телеметрии самосвала - скорость, вибрации, расход топлива, ускорения и др. Для такого элементарного участка строится модель расхода топлива на участке в зависимости от различных параметров, например, таких как геометрическое представление участка и его соседей, параметры телеметрии - как ехал самосвал по этому участку, а также как подъезжал к нему, осадки, граф дорог, перепад высот, водитель, модель самосвала, состояние самосвала (например, коэффициент технической готовности (КТГ), моточасы). Предиктивная модель строится с помощью алгоритма градиентного бустинга, валидированного по времени. На выходе получают обученную модель, которая может прогнозировать расход топлива на участке в зависимости от параметров участка и как его будет проезжать самосвал. Мгновенный расход топлива сравнивается с определенным с помощью построенной модели расхода топлива минимальным расходом топлива и определяется комбинация параметров, которые считаются целевыми для подсказок с целью снижения расхода топлива до минимального значения в случае, когда мгновенный расход топлива превысил минимальное значение. Модель расхода топлива используется для формирования рекомендаций водителям.
Для первоначального расчёта рекомендаций и минимизации влияния технического состояния самосвалов, минимизации влияния навыков вождения водителей проводится детальный анализ движения самосвалов и оптимальных прохождений маршрутов самосвалов на основе не менее 500 проездов самосвалов по маршруту. Анализируются телеметрия и мгновенные расходы топлива от самосвала с частотой дискретизации 1 Гц. Далее для каждого из участков маршрута анализируется мгновенный расход топлива и режимы движения, которые предшествовали прохождению участка дороги. После 500 проездов оптимальные режимы для каждого из участков дороги и обновляются для всех однотипных самосвалов.
Если при прохождении более 500 проездов по маршруту моделирование изменяет рекомендации режимов движения (пример изменения рекомендации - озвучивание изменения скоростного режима, например, «через 100 метров поворот, снизьте скорость до 15 км/ч»), то они перезаписываются в бортовой компьютер для изменения подсказок водителям.
Имея возможность прогнозировать расход на одном участке маршрута, можно спрогнозировать расход на всех участках маршрута, сложить их и оценить общий расход на маршруте. Таким образом, решается задача оптимизации - минимизировать расход топлива на маршруте, который состоит из суммы расходов топлива на участках маршрута, варьируя значениями скорости прохождения участков. Для решения данной задачи используется метод байесовской оптимизации, а для распределения случайной величины скорости используются нормальные распределения скоростей прохождения каждого участка “лучшими” водителями с точки зрения расхода топлива на маршруте.
Для поиска оптимального профиля прохождения маршрута используют методы неградиентной оптимизации. Параметрические значения, определенные на шаге анализа 500 маршрутов, которые записываются в контроллер и считаются эталонными - являются базисом для оптимизации.
Оптимальные скоростные режимы движения на отдельных участках каждого из маршрутов определяются с помощью математического моделирования и включают сведения о необходимой оптимальной скорости входа на следующий участок (например, разгон перед подъёмом), с учетом максимальной разрешенной скорости движения для решения задач увеличения производительности. Данные рекомендации визуализируются (могут визуализироваться как на электронную панель приборов, так и на HUD дисплей, подключаемый к бортовому компьютеру системы) или озвучиваются (динамик подключается к бортовому компьютеру системы) в соответствии с положением самосвала и расположении его на участке маршрута на виртуальной карте точек выдачи рекомендаций по участкам маршрутов. Данная карта загружается в бортовой компьютер с голосовым или визуальным оповещением водителю карьерного самосвала. При движении самосвала по маршруту водителю выдаются рекомендации по оптимальной скорости. Данный функционал работает даже при неполном покрытии связью всего карьера, так как сравнивается текущая скорость, направление движения и местоположение с загруженной в контроллере цифровой картой карьера.
Параметры телеметрии, граф дорог, осадки, водитель, скорость/ускорение/плавность движения для каждого участка сравниваются с мгновенным расходом топлива (потраченных литров топлива) на этом участке. Определяется параметрическая модель, где значение потраченных литров минимальное для каждой модели самосвалов.
Подъезд под экскаватор или пункт загрузки обновляется на основании 100 проездов самосвалов в связи с динамическим изменением места погрузки и рассчитывается только для езды передним ходом. Подъезд под экскаватор и под пункт разгрузки — это участки маршрутов, которые динамичные, в отличии от остального маршрута, который квази-статичный, поэтому усредняют информацию о параметрах работы техники только на 100 проездах в связи с тем, что эти участки динамично меняются. Подъезд под экскаватор меняется примерно раз в день, в связи с тем, что фронт работ изменяется, поэтому корректируют точность модели примерно на суточном количестве рейсов и адаптируют ее каждый день или, если подсказок недостаточно, в местах погрузки не выдают рекомендации.
Цифровая карта дорог – это построенный методами кластеризации граф дорог с разбиением на элементарные участки. Для каждого маршрута строится цифровая карта дорог на основе GPS, которая разбивается на элементарные участки, где водителям самосвалов нужно менять режим движения, например, стили вождения, скорость. Для каждого из участков цифровой карты дорог создаются рекомендации, которые озвучиваются или визуализируются водителям. Например, рекомендации по поддержанию конкретной скорости на участке дороги, моменту и месту, когда нужно начать ускоряться или менять скорость, тормозить, предупреждения о перекрестках, сужении дороги, качестве дорожного полотна и др. Рекомендации водителям на основании созданной цифровой карты дорог, разработанного профиля прохождения маршрута озвучиваются через колонку (звуковые подсказки скорости, стиля вождения, профиля дороги и др.), подключенную к бортовому контроллеру (Фиг. 2) или визуализируются на HUD-дисплее (могут визуализироваться на электронной панели приборов или бортовом компьютере) в виде визуальных подсказок с отображением скорости, поворотов, ускорений и др.
Места, где происходят систематически повторяющиеся скачки мгновенного расхода топлива из-за ускорений, визуализируются цветом на цифровой карте дорог в серверной аппаратно-программной части. Места, в которых систематически наблюдается повышенный удельный расход топлива, определяются автоматически на основе анализа мгновенного расхода топлива и наложения на точку/участок цифровой карты маршрута параметров скорости, водителя, телеметрии. Строится так называемая тепловая карта (heat-map), на которой для диспетчера размер кружочка является индикатором, что качество дорог или другие факторы влияют на повышенный расход топлива в данной точке маршрута.
Соблюдение рекомендаций водителями самосвала фиксируется в виде отчета с анализом влияния выполнения рекомендаций на удельный расход топлива, с рейтингом водителей, и анализом того, соблюдаются или не соблюдаются рекомендации. Примеры отчетных форм приведены на Фиг. 3-6.
Система работает следующим образом. При включении бортового питания/включении самосвала и начале движения бортовой компьютер анализирует текущие данные системы контроля телеметрии (например, сигналы скорости, ускорения, торможения, GPS-координаты, загрузка, данные диагностики двигателя) и датчика мгновенного расхода топлива самосвала, сопоставляет текущие координаты самосвала с координатами цифровой карты, определяет, на каком участке цифровой карты в данный момент находится самосвал, сопоставляет текущие данные системы контроля телеметрии и датчика мгновенного расхода топлива самосвала c параметрами оптимального профиля маршрута для данного участка. В случае отклонения от оптимальных профилей прохождения маршрута водителю самосвала визуализируют или озвучивают записанные в виртуальной карте подсказок на бортовом компьютере рекомендации и обновляются при изменении маршрутов или параметров дороги. При построении оптимальных профилей прохождения маршрута и выдаче рекомендаций водителю учитываются факторы, которые влияют на удельный расход топлива (например, режимы движения самосвала, которые предшествовали прохождению каждого элементарного участка маршрута, информация о профиле дороги, информация о маршруте, прогноз погоды, производственные показатели работы самосвала, загрузка самосвала, тип и модель самосвала, стиль вождения водителя).
На Фиг. 7 представлена общая схема вычислительного устройства (700), обеспечивающего обработку данных, необходимую для реализации заявленного решения.
В общем случае устройство (700) содержит такие компоненты, как: один или более процессоров (701), по меньшей мере одну память (702), средство хранения данных (703), интерфейсы ввода/вывода (704), средство В/В (705), средства сетевого взаимодействия (706).
Процессор (701) устройства выполняет основные вычислительные операции, необходимые для функционирования устройства (700) или функциональности одного или более его компонентов. Процессор (701) исполняет необходимые машиночитаемые команды, содержащиеся в оперативной памяти (702).
Память (702), как правило, выполнена в виде ОЗУ и содержит необходимую программную логику, обеспечивающую требуемый функционал.
Средство хранения данных (703) может выполняться в виде HDD, SSD дисков, рейд массива, сетевого хранилища, флэш-памяти, оптических накопителей информации (CD, DVD, MD, Blue-Ray дисков) и т.п. Средство (703) позволяет выполнять долгосрочное хранение различного вида информации.
Интерфейсы (704) представляют собой стандартные средства для подключения и работы с серверной частью, например, USB, RS232, RJ45, LPT, COM, HDMI, PS/2, Lightning, FireWire и т.п.
Выбор интерфейсов (704) зависит от конкретного исполнения устройства (700), которое может представлять собой персональный компьютер, мейнфрейм, серверный кластер, тонкий клиент, смартфон, ноутбук и т.п.
В качестве средств В/В данных (705) в любом воплощении системы должна использоваться клавиатура. Аппаратное исполнение клавиатуры может быть любым известным: это может быть, как встроенная клавиатура, используемая на ноутбуке или нетбуке, так и обособленное устройство, подключенное к настольному компьютеру, серверу или иному компьютерному устройству. Подключение при этом может быть, как проводным, при котором соединительный кабель клавиатуры подключен к порту PS/2 или USB, расположенному на системном блоке настольного компьютера, так и беспроводным, при котором клавиатура осуществляет обмен данными по каналу беспроводной связи, например, радиоканалу, с базовой станцией, которая, в свою очередь, непосредственно подключена к системному блоку, например, к одному из USB-портов. Помимо клавиатуры, в составе средств В/В данных также может использоваться: джойстик, дисплей (сенсорный дисплей), проектор, тачпад, манипулятор мышь, трекбол, световое перо, динамики, микрофон и т.п.
Средства сетевого взаимодействия (706) выбираются из устройств, обеспечивающих сетевой прием и передачу данных, например, Ethernet карту, WLAN/Wi-Fi модуль, Bluetooth модуль, BLE модуль, NFC модуль, IrDa, RFID модуль, GSM модем и т.п. С помощью средств (N05) обеспечивается организация обмена данными по проводному или беспроводному каналу передачи данных, например, WAN, PAN, ЛВС (LAN), Интранет, Интернет, WLAN, WMAN или GSM, 3G, 4G, 5G.
Компоненты устройства (700) сопряжены посредством общей шины передачи данных (707).
В настоящих материалах заявки представлено предпочтительное раскрытие осуществления заявленного технического решения, которое не должно использоваться как ограничивающее иные, частные воплощения его реализации, которые не выходят за рамки испрашиваемого объема правовой охраны и являются очевидными для специалистов в соответствующей области техники.
Специалисту в данной области техники должно быть понятно, что различные вариации заявляемого способа и системы не изменяют сущность изобретения, а лишь определяют его конкретные воплощения и применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ СОВЕТЧИК ДЛЯ ВОДИТЕЛЕЙ | 2024 |
|
RU2831868C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПТИМИЗАЦИИ ЭНЕРГОПОТРЕБЛЕНИЯ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2014 |
|
RU2640919C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ИНСТРУКЦИЯМИ ПО ЭКСПЛУАТАЦИИ ВОДИТЕЛЯ РАБОЧЕЙ МАШИНЫ | 2008 |
|
RU2488663C2 |
| ОЦЕНКА СТИЛЯ ВОЖДЕНИЯ АВТОМОБИЛЕЙ, ОРИЕНТИРОВАННОГО НА ЭКОНОМИЮ ТОПЛИВА | 2012 |
|
RU2616487C2 |
| ОПРЕДЕЛЕНИЕ ЭКОНОМНОГО МАРШРУТА ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2501088C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО, СПОСОБ И СИСТЕМА ДЛЯ ПЛАНИРОВАНИЯ РЕЖИМОВ ТРАНСПОРТНОГО СРЕДСТВА С ИСПОЛЬЗОВАНИЕМ ИЗУЧЕННЫХ ПРЕДПОЧТЕНИЙ ПОЛЬЗОВАТЕЛЯ | 2017 |
|
RU2683902C2 |
| Система поддержания интервала разграничения между последовательно движущимися поездами | 2024 |
|
RU2839168C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2023 |
|
RU2818401C1 |
| Система управления энергоустановкой беспилотного гибридного автомобиля | 2019 |
|
RU2733599C1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЗИРОВАННОГО ПОСТРОЕНИЯ МАРШРУТА НА ОСНОВАНИИ ТЕЛЕМАТИЧЕСКОГО СКОРИНГА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2023 |
|
RU2814789C1 |




Группа изобретений относится к системе и способу оптимизации работы самосвала с помощью цифрового советчика водителя. Система содержит: сервер и бортовую вычислительную систему (БВС) самосвала. БВС содержит: систему контроля телеметрии, датчик мгновенного расхода топлива самосвала, цифровой советчик. Сервер осуществляет построение цифровой карты маршрута движения самосвала с разбиением на элементарные участки, определение оптимальных профилей прохождения маршрута самосвала с помощью методов машинного обучения на основании данных телеметрии и датчика мгновенного расхода топлива самосвала для каждого элементарного участка маршрута с учетом факторов, влияющих на удельный расход топлива. Создают виртуальную карту выдачи рекомендаций по элементарным участкам маршрута движения самосвала и построенной цифровой карты маршрута. Загружают в БВС цифровую карту маршрута движения самосвала и виртуальную карту выдачи рекомендаций по элементарным участкам маршрута. С помощью цифрового советчика выдают в режиме реального времени рекомендации по режимам вождения для каждого элементарного участка маршрута в соответствии с виртуальной картой выдачи рекомендаций по элементарным участкам маршрута в зависимости от положения самосвала на цифровой карте маршрута и оптимальных профилей прохождения маршрута с учетом факторов, влияющих на удельный расход топлива. Достигается оптимизация работы самосвала. 2 н. и 8 з.п. ф-лы, 7 ил.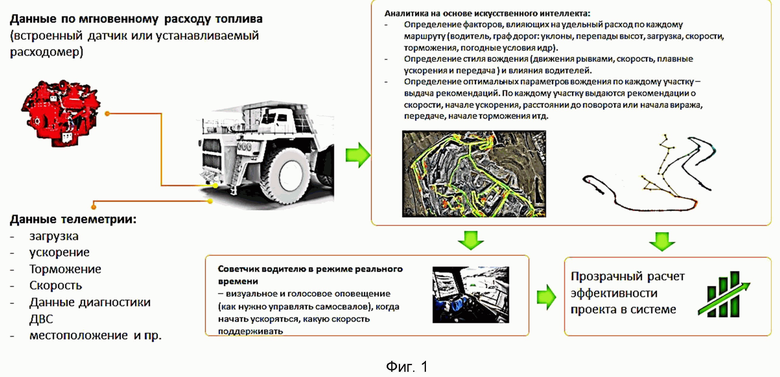
1. Система оптимизации работы самосвала с помощью цифрового советчика водителю, которая содержит:
сервер;
бортовую вычислительную систему (БВС) самосвала, включающую, по меньшей мере:
- систему контроля телеметрии и датчик мгновенного расхода топлива самосвала;
- цифровой советчик;
причем с помощью сервера осуществляют построение цифровой карты маршрута движения самосвала с разбиением на элементарные участки, определяют оптимальные профили прохождения маршрута самосвала для каждого элементарного участка с помощью методов машинного обучения на основании собранных данных телеметрии и датчика мгновенного расхода топлива самосвала для каждого элементарного участка маршрута с учетом факторов, влияющих на удельный расход топлива, и создают виртуальную карту выдачи рекомендаций по элементарным участкам маршрута движения самосвала на основании определенных оптимальных профилей прохождения маршрута для каждого элементарного участка и построенной цифровой карты маршрута; и загружают в БВС цифровую карту маршрута движения самосвала и виртуальную карту выдачи рекомендаций по элементарным участкам маршрута;
и с помощью цифрового советчика выдают водителю самосвала в режиме реального времени, на основе текущих данных системы контроля телеметрии и датчика мгновенного расхода топлива самосвала, рекомендации по режимам вождения для каждого элементарного участка маршрута в соответствии с виртуальной картой выдачи рекомендаций по элементарным участкам маршрута в зависимости от положения самосвала на цифровой карте маршрута и определенных оптимальных профилей прохождения маршрута с учетом факторов, влияющих на удельный расход топлива.
2. Система по п. 1, характеризующаяся тем, что данные телеметрии самосвала включают, по меньшей мере, следующее: скорость, ускорение, торможение, загрузка, местоположение, данные диагностики двигателя.
3. Система по п. 1, характеризующаяся тем, что факторы, влияющие на удельный расход топлива, включают, по меньшей мере, следующее: режимы движения самосвала, которые предшествовали прохождению каждого элементарного участка маршрута, информация о профиле дороги, информация о маршруте, прогноз погоды, производственные показатели работы самосвала, загрузка самосвала, тип и модель самосвала, стиль вождения водителя.
4. Система по п. 1, характеризующаяся тем, что цифровой советчик выдает водителю самосвала рекомендации по режимам вождения путем визуализации или озвучивания.
5. Система по п. 1, характеризующаяся тем, что цифровой советчик визуализирует места повышенного мгновенного расхода топлива на цифровой карте дорог.
6. Способ оптимизации работы самосвала с помощью цифрового советчика водителю, включающий следующие шаги:
осуществляют построение цифровой карты маршрута движения самосвала с разбиением на элементарные участки, определяют оптимальные профили прохождения маршрута самосвала для каждого элементарного участка с помощью методов машинного обучения на основании собранных данных телеметрии и датчика мгновенного расхода топлива самосвала для каждого элементарного участка маршрута с учетом факторов, влияющих на удельный расход топлива, и создают виртуальную карту выдачи рекомендаций по элементарным участкам маршрута движения самосвала на основании определенных оптимальных профилей прохождения маршрута для каждого элементарного участка и построенной цифровой карты маршрута;
загружают цифровую карту маршрута движения самосвала и виртуальную карту выдачи рекомендаций по элементарным участкам маршрута в бортовую вычислительную систему (БВС) самосвала;
цифровой советчик выдает водителю самосвала в режиме реального времени, на основе текущих данных телеметрии и датчика мгновенного расхода топлива самосвала, рекомендации по режимам вождения для каждого элементарного участка маршрута в соответствии с виртуальной картой выдачи рекомендаций по элементарным участкам маршрута в зависимости от положения самосвала на цифровой карте маршрута и определенных оптимальных профилей прохождения маршрута с учетом факторов, влияющих на удельный расход топлива.
7. Способ по п. 6, характеризующийся тем, что данные телеметрии самосвала включают, по меньшей мере, следующее: скорость, ускорение, торможение, загрузка, местоположение, данные диагностики двигателя.
8. Способ по п. 6, характеризующийся тем, что факторы, влияющие на удельный расход топлива, включают, по меньшей мере, следующее: режимы движения самосвала, которые предшествовали прохождению каждого элементарного участка маршрута, информация о профиле дороги, информация о маршруте, прогноз погоды, производственные показатели работы самосвала, загрузка самосвала, тип и модель самосвала, стиль вождения водителя.
9. Способ по п. 6, характеризующийся тем, что цифровой советчик выдает водителю самосвала рекомендации по режимам вождения путем визуализации или озвучивания.
10. Способ по п. 6, характеризующийся тем, что цифровой советчик визуализирует места повышенного мгновенного расхода топлива на цифровой карте дорог.
| US 2011130914 A1, 02.06.2011 | |||
| УСТРОЙСТВО ДЕКОДИРОВАНИЯ ИЗОБРАЖЕНИЯ И СПОСОБ ДЕКОДИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2019 |
|
RU2789732C2 |
| US 2011130906 A1, 02.06.2011 | |||
| СПОСОБ ЛЕЧЕНИЯ ЭНДОТЕЛИАЛЬНО-ЭПИТЕЛИАЛЬНОЙ ДИСТРОФИИ РОГОВИЦЫ | 2015 |
|
RU2594447C1 |
| US 2019378417 A1, 12.12.2019. | |||

