Перекрестные ссылки на родственные заявки
Настоящая заявка является неотъемлемой частью заявки на патент США №15/049603, озаглавленной «СПОСОБ И СИСТЕМА ДЛЯ КРУИЗ-КОНТРОЛЯ ТРАНСПОРТНОГО СРЕДСТВА», поданной 22 февраля 2016 г. Заявка на патент США №15/049603 испрашивает приоритет по предварительной заявке на патент США №62/146880, озаглавленной «СПОСОБ И СИСТЕМА ДЛЯ КРУИЗ-КОНТРОЛЯ ТРАНСПОРТНОГО СРЕДСТВА», поданной 13 апреля 2015 г. Заявка на патент США №15/049603 также испрашивает приоритет по предварительной заявке на патент США №62/148095, озаглавленной «СИСТЕМА И ПОДХОД ДЛЯ ОПТИМИЗАЦИИ ЭКОНОМИИ ТОПЛИВА ДЛЯ КРУИЗ-КОНТРОЛЯ», поданной 15 апреля 2015 г. Все содержание каждой из вышеперечисленных заявок полностью включено в настоящую заявку посредством ссылок для любых целей.
Область техники
Настоящее изобретение относится, в основном, к способам и системам для управления переключением передач трансмиссии транспортного средства, работающего в режиме круиз-контроля, когда водитель транспортного средства запрашивает автоматическое управление скоростью транспортного средства.
Уровень техники/Раскрытие изобретения
Скоростью транспортного средства можно управлять автоматически для достижения требуемой скорости посредством контроллера с минимальными входными воздействиями со стороны водителя. Один пример использования контроллера для регулирования скорости транспортного средства предусматривает управление транспортным средством в режиме круиз-контроля. Режим круиз-контроля может быть раскрыт как рабочий режим транспортного средства, в котором скорость транспортного средства поддерживается в пределах требуемого диапазона скоростей транспортного средства, ограниченных верхним и нижним порогами скорости транспортного средства без запрашивания водителем крутящего момента от источника движущей силы транспортного средства. Контроллер поддерживает скорость транспортного средства в пределах требуемого диапазона скоростей посредством регулирования выработки крутящего момента источника движущей силы транспортного средства. Таким образом, скорость транспортного средства поддерживается в пределах требуемого диапазона скоростей посредством увеличения и уменьшения выработки крутящего момента источника движущей силы транспортного средства. Один из вариантов поддержания скорости транспортного средства посредством контроллера состоит в пропорциональном регулировании выходного крутящего момента источника движущей силы транспортного средства на основании ошибки скорости транспортного средства. Контроллер может применять пропорционально-интегрально-дифференцирующий (ПИД) алгоритм, или некоторый аналогичный вариант, для регулирования выработки крутящего момента источника движущей силы транспортного средства и поддержания скорости транспортного средства в пределах требуемого диапазона скоростей транспортного средства. Однако ПИД алгоритмы регулировки скорости транспортного средства обладают реакцией, выраженной в том, что эти алгоритмы, в основном, используют существующую или текущую ошибку скорости транспортного средства для обеспечения исправленной траектории скорости транспортного средства. В результате и вследствие того, что транспортные средства часто работают на высокой передаче в режиме круиз-контроля, контроллер может внести большие изменения в крутящий момент, запрашиваемый от источника движущей силы транспортного средства. Колебания запрошенного крутящего момента могут привести к переключению трансмиссии на более низкую передачу, что может увеличить потребление топлива и потревожить водителя.
Авторы настоящего изобретения обнаружили вышеупомянутую проблему и разработали систему транспортного средства, содержащую: транспортное средство, содержащее источник движущего крутящего момента; и контроллер в транспортном средстве, содержащий исполняемые инструкции, сохраненные в долговременной памяти, причем инструкции содержат прогнозирующую программу круиз-контроля на основе адаптивной нелинейный модели, содержащую значение порогового крутящего момента силового агрегата для уменьшения количества переключений трансмиссии при поддержании скорости транспортного средства в диапазоне между первой пороговой скоростью транспортного средства и второй пороговой скоростью транспортного средства.
За счет адаптирования моделей транспортного средства и обеспечения выходных данных от адаптированных моделей транспортного средства для прогнозирующей программы круиз-контроля на основе нелинейный модели и ограничения крутящего момента силового агрегата до меньшего значения, чем крутящий момент, при котором понижают передачу трансмиссии, можно обеспечить технический результат в виде уменьшения количества переключений трансмиссии при управлении транспортным средством в режиме круиз-контроля. Количество переключений трансмиссии можно уменьшить, по меньшей мере частично, на основе исходно известной информации об уклоне дороги. Кроме того, за счет адаптирования модели транспортного средства и модели потребления топлива транспортным средством в режиме реального времени, когда транспортное средство находится в режиме круиз-контроля, в прогнозирующем режиме круиз-контроля на основе нелинейный модели, можно регулировать стратегию управления крутящим моментом от выработки постоянного крутящего момента до выработки импульсного и плавного крутящего момента, обеспечивая, тем самым, различные стратегии задания крутящего момента от контроллера для тех же самых условий движения, за исключением изменений в модели потребления топлива транспортным средством, обусловленных свойствами топлива или другими изменениями рабочих характеристик двигателя. В результате может быть автоматически выбрана оптимальная стратегия экономии топлива на основе фактических параметров модели потребления топлива транспортным средством и системных ограничений.
Настоящее изобретение может обеспечить несколько преимуществ. В частности, этот подход может обеспечить уменьшение количества переключений трансмиссии во время управления транспортным средством в режиме регулировки скорости. Кроме того, с помощью такого подхода можно уменьшить эксплуатационные расходы транспортного средства за счет сокращения расхода топлива. Кроме того, этот подход может обеспечить улучшение управляемости транспортного средства.
Вышеуказанные преимущества, другие преимущества, а также отличительные признаки настоящего изобретения будут очевидными из раздела «Осуществления изобретения», который можно рассматривать отдельно или совместно с приложенными иллюстрациями.
Следует понимать, что вышеприведенное краткое раскрытие изобретения служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно в разделе «Осуществление изобретения». Это раскрытие не предназначено для обозначения ключевых или существенных отличительных признаков заявленного объекта изобретения, объем которого однозначно определен формулой изобретения, приведенной после раздела «Осуществление изобретения». Кроме того, заявленный объект изобретения не ограничен вариантами осуществления, которые устраняют какие-либо недостатки, указанные выше или в любой другой части настоящего раскрытия.
Краткое описание чертежей
На фиг. 1 показан пример транспортного средства, в котором могут быть реализованы раскрытые в настоящем документе системы и способы;
На фиг. 2 показан пример транспортного средства и его электронного горизонта;
На фиг. 3 показан пример источника движущей силы транспортного средства;
На фиг. 4 показан пример системы привода транспортного средства, содержащей источник движущей силы транспортного средства;
На фиг. 5 показана блок-схема примера системы круиз-контроля транспортного средства;
На фиг. 6А и 6В показан пример способа для прогнозирующего круиз-контроля на основе адаптивной нелинейной модели с оптимизацией потребления топлива и выбором нейтральной передачи;
На фиг. 7 показан подробный пример способа оптимизации для прогнозирующего круиз-контроля на основе нелинейной модели, названного «Итерации последовательного квадратичного программирования» (ПКП);
На фиг. 8 показан подробный пример способа для прогнозирующего круиз-контроля на основе нелинейной модели с оптимизацией потребления топлива и выбором нейтральной передачи;
На фиг. 9А и 9В показан пример моделей потребления топлива транспортным средством; и
На фиг. 10 показан пример последовательности для круиз-контроля транспортного средства с выбором нейтральной передачи.
Осуществление изобретения
Нижеследующее раскрытие относится к системам и способам для улучшения работы транспортного средства, функционирующего в режиме круиз-контроля. На фиг. 1 показан неограничивающий пример транспортного средства для работы в режиме круиз-контроля, в котором контроллер применяет прогнозирующий алгоритм круиз-контроля на основе нелинейной модели с оптимизацией потребления топлива. На фиг. 2 в качестве примера показано транспортное средство и электронный горизонт, который обеспечивает входные данные для прогнозирующего алгоритма круиз-контроля на основе адаптивной нелинейной модели. На фиг. 3 и 4 показаны, в качестве неограничивающих примеров, источники движущей силы транспортного средства в системе привода транспортного средства. На фиг. 5 показана блок-схема примера системы круиз-контроля транспортного средства. Способы эксплуатации транспортного средства в режиме круиз-контроля содержат один пример версии прогнозирующего алгоритма круиз-контроля на основе адаптивной нелинейной модели, показанный на фиг. 6А-8. Пример моделей потребления топлива источником движущей силы транспортного средства показан на фиг. 9А и 9В. На фиг. 10 показан пример операционной последовательности режима круиз-контроля транспортного средства.
На фиг. 1 показано транспортное средство 100, содержащее контроллер 12 с возможностью получения данных от датчика и регулирования приводов. Контроллер 12 может управлять транспортным средством 100 в режиме круиз-контроля, в котором скорость транспортного средства поддерживается в пределах требуемого диапазона скоростей транспортного средства, ограниченного верхней пороговой скоростью транспортного средства и нижней пороговой скоростью транспортного средства. В некоторых примерах контроллер 12 может взаимодействовать с дополнительными контроллерами для управления транспортным средством 100. Транспортное средство 100 показано с приемником 130 системы глобального позиционирования (GPS). Спутник 102 может передавать в приемник 130 GPS информацию с метками времени, а приемник может передавать информацию в систему 140 определения положения транспортного средства. Система 140 определения положения транспортного средства может передавать в контроллер 12 данные о текущем и будущем уклоне дороги. Транспортное средство 100 может также быть оборудовано опциональной камерой 135 для наблюдения дорожных условий на пути следования транспортного средства 100. Например, камера 135 может получать данные о дорожных условиях от дорожных знаков 166 или дисплеев. Система 140 определения положения транспортного средства может в качестве альтернативы получить информацию для определения положения транспортного средства от радиовышки 104 через приемник 132. В некоторых примерах транспортное средство 100 может также содержать датчик 138 для определения близости транспортных средств на пути следования транспортного средства 100. Датчик 138 может использовать лазерный, звуковой или радарный сигнал.
В этом примере транспортное средство 100 показано в виде пассажирского транспортного средства. Однако в некоторых примерах транспортное средство 100 может представлять собой коммерческое транспортное средство, такое как грузовой полуприцеп и грузовик, поезд или судно.
На фиг. 2 в качестве примера показано транспортное средство 100 и расстояние 210, соответствующее электронному горизонту транспортного средства. Транспортное средство 100 генерирует электронный горизонт (например, вектор данных), содержащий дорожную информацию об уклоне дороги 214. Электронный горизонт состоит из множества блоков 220 или сегментов, причем каждый блок имеет единственное связанное или соответствующее значение уклона дороги. Длина блока может быть основана на расстоянии или времени. Информация об уклоне дороги предоставлена для заранее заданного расстояния 210 или заранее заданного количества времени движения транспортного средства. Информация об уклоне дороги может быть направлена в контроллер 12, показанный на фиг. 1. Например, значение уклона дороги может быть предоставлено для заранее заданного расстояния на пути следования транспортного средства 100, например, для 1500 метров. В качестве альтернативы значение уклона дороги может быть обеспечено для заранее заданного количества времени на будущем пути следования транспортного средства. Например, значение уклона дороги можно обеспечить на 10 секунд вперед для транспортного средства, двигающегося со скоростью 110 км/час, или приблизительно для 1833 метров. Данные об уклоне дороги могут храниться в памяти системы 140 определения положения транспортного средства, показанной на фиг. 1, или могут быть определены на основе значений высоты расположения дороги, хранимых в памяти. Например, значения уклона дороги могут быть извлечены из памяти посредством поиска в памяти на основе данных о положении транспортного средства и его маршруте. Значения уклона дороги, соответствующие заранее заданному расстоянию или времени, могут быть сохранены в памяти в качестве массива или вектора, и могут быть выполнены обновления этого массива при движении транспортного средства, по принципу «первым пришел - первым ушел». Например, если значение уклона дороги предоставляют для каждых 100 метров поверхности дороги, то массив, соответствующий 1500 метрам для данных об уклоне дороги, содержит 15 блоков и их соответствующие значения уклона дороги. Значения уклона дороги могут изменяться ступенчатым образом от блока к блоку.
На фиг. 3 показан в качестве примера источник движущей силы транспортного средства. В этом примере источник движущей силы транспортного средства представляет собой двигатель с искровым зажиганием. Однако источник движущей силы транспортного средства может представлять собой дизельный двигатель, турбину или электрический двигатель.
На фиг. 3 показана схема, изображающая один цилиндр многоцилиндрового двигателя 330 в системе двигателя 300. Двигателем 330 могут управлять, по меньшей мере частично, посредством системы управления, содержащей контроллер 12 и при помощи входных сигналов от водителя 382 транспортного средства, поступающих через устройство 380 ввода. В этом примере устройство 380 ввода содержит педаль акселератора и датчик 384 положения педали для генерации пропорционального сигнала положения педали.
Камера 332 сгорания двигателя 330 может содержать цилиндр, сформированный стенками 334 цилиндра с расположенным в них поршнем 336. Поршень 336 может быть соединен с коленчатым валом 340 таким образом, чтобы возвратно-поступательные движения поршня могли быть преобразованы во вращательное движение коленчатого вала. Коленчатый вал 340 может быть соединен по меньшей мере с одним ведущим колесом транспортного средства через промежуточную систему трансмиссии. Кроме того, мотор стартера двигателя может быть соединен с коленчатым валом 340 при помощи маховика для обеспечения возможности запуска двигателя 330.
Камера 332 сгорания имеет возможность получать впускной воздух от впускного коллектора 344 через впускной канал 342 и может выпускать отработавшие газы через выпускной канал 348. Впускной коллектор 344 и выпускной канал 348 имеют возможность выборочно сообщаться с камерой 332 сгорания через впускной клапан 352 и выпускной клапан 354, соответственно. В некоторых примерах камера 332 сгорания может содержать два или более впускных клапана и/или два или более выпускных клапана.
В этом примере кулачковый привод имеет возможность управлять впускным клапаном 352 и выпускными клапанами 354 при помощи систем 351 и 353 кулачкового привода, соответственно. Каждая из систем 351 и 353 кулачкового привода может содержать один или несколько кулачков и может использовать одну или несколько из следующих систем: переключения профилей кулачков (ППК), изменения фаз кулачкового распределения (ИФКР), изменения фаз газораспределения (ИФГ) и/или изменения высоты подъема клапанов (ВПК) с возможностью управления посредством контроллера 12 для изменения работы клапанов. Положение впускного клапана 352 и выпускного клапана 354 могут определить посредством датчика 355 положения и датчика 357 положения, соответственно. В альтернативных примерах впускным клапаном 352 и/или выпускным клапаном 354 может управлять электропривод клапанов. Например, в качестве альтернативы цилиндр 332 может содержать впускной клапан с возможностью управления посредством электропривода клапанов и выпускной клапан с возможностью управления посредством кулачкового привода с использованием систем ППК и/или ИФКР.
Показано, что топливный инжектор 369 соединен непосредственно с камерой 332 сгорания для впрыскивания топлива непосредственно в цилиндр пропорционально длительности импульса, получаемого от контроллера 12. В этом случае топливный инжектор 369 обеспечивает процесс, известный как непосредственный впрыск топлива в камеру 332 сгорания. Этот топливный инжектор может быть расположен на боковой части камеры сгорания или, например, на верхней части камеры сгорания. Топливо могут подавать в топливный инжектор 369 посредством топливной системы (не показанной на чертеже), содержащей топливный бак, топливный насос и топливную рампу. В некоторых примерах камера 332 сгорания может, альтернативно или дополнительно, содержать топливный инжектор, расположенный во впускном коллекторе 344, что обеспечивает вариант впрыска топлива во впускной тракт выше по потоку от камеры 332 сгорания.
Искру зажигания обеспечивают в камере 332 сгорания посредством свечи 366 зажигания. Система зажигания может дополнительно содержать катушку зажигания (не показанную на чертеже) для увеличения напряжения, подаваемого на свечу 366 зажигания. В других примерах, например, в дизельном двигателе, свеча 366 зажигания может отсутствовать.
Впускной канал 342 может содержать дроссель 362 с дроссельной заслонкой 364. В этом конкретном примере контроллер 12 может изменять положение дроссельной заслонки 364, используя сигналы, направляемые на электромотор или привод в составе дросселя 362, причем данная конфигурация обычно упоминается как электронное управление дросселем (ЭУД). Таким образом, управление дросселем 362 позволяет изменять количество впускного воздуха, подаваемого в камеру 332 сгорания, а также в другие цилиндры двигателя. Контроллер 12 может выбирать положение дроссельной заслонки 364 на основе сигнала положения дросселя. Впускной канал 342 может содержать датчик 320 массового расхода воздуха и датчик 322 давления воздуха в коллекторе для получения данных о количестве воздуха, поступающего в двигатель 330.
Датчик 327 отработавших газов показан соединенным с выпускным каналом 348 выше по потоку от устройства 370 снижения токсичности отработавших газов, в соответствии с направлением потока отработавших газов. Датчик 327 может представлять собой любой подходящий датчик для определения воздушно-топливного отношения отработавших газов, например, может представлять собой линейный кислородный датчик или универсальный или широкодиапазонный датчик кислорода в отработавших газах (УДКОГ), бистабильный кислородный датчик или датчик кислорода в отработавших газах (ДКОГ), нагреваемый ДКОГ (НДКОГ), датчик NOx, углеводородов или СО. Например, расположенный выше по потоку датчик 327 отработавших газов может представлять собой УДКОГ, выполненный с возможностью создания выходного сигнала, например сигнала напряжения, пропорционального количеству кислорода, присутствующего в отработавших газах. Контроллер 12 выполнен с возможностью преобразования выходного сигнала кислородного датчика в значение воздушно-топливного отношения отработавших газов посредством передаточной функции кислородного датчика.
Показано, что устройство 370 снижения токсичности отработавших газов установлено в выпускном канале 348 ниже по потоку от датчика 327 отработавших газов. Устройство 370 может представлять собой трехрежимный каталитический нейтрализатор (ТРК), ловушку NOx, различные другие устройства снижения токсичности отработавших газов или комбинацию указанных устройств. В некоторых конструкциях, во время эксплуатации двигателя 330, устройство 370 снижения токсичности отработавших газов может быть выполнено с возможностью периодического выключения-включения в результате работы по меньшей мере одного цилиндра двигателя в пределах некоторого воздушно-топливного отношения.
Контроллер 12 показан на фиг. 3 показан в виде микрокомпьютера, содержащего микропроцессорное устройство 302, порты ввода/вывода 304, электронный носитель информации для исполняемых программ и калибровочных значений, показанный в этом конкретном примере в виде микросхемы 306 постоянного запоминающего устройства (например, долговременной памяти), оперативное запоминающее устройство 308, энергонезависимое запоминающее устройство 310 и шину данных. Контроллер 12 может получать различные сигналы от датчиков, соединенных с двигателем 330, в дополнение к вышеуказанным сигналам, в том числе, данные измерения входного массового расхода воздуха (МРВ) от датчика 320 массового расхода воздуха; температуру охлаждающей жидкости двигателя (ТОЖД) от температурного датчика 323, присоединенного к охлаждающей рубашке 314; сигнал положения двигателя от датчика 318 на эффекте Холла (или датчика другого типа), измеряющего положение коленчатого вала 340; положение дросселя от датчика 365 положения дросселя; влажность окружающей среды от датчика 375 влажности, атмосферное давление от датчика 376 атмосферного давления и сигнал абсолютного давления в коллекторе (ДВК) от датчика 322. Сигнал частоты вращения двигателя может быть сгенерирован контроллером 12 по сигналу датчика 318 положения коленчатого вала. Сигнал давления в коллекторе также обеспечивает индикацию разрежения или давления во впускном коллекторе 344. Следует принять во внимание, что могут использоваться различные комбинации вышеупомянутых датчиков, например, датчик МРВ без датчика ДВК, и наоборот. Во время работы двигателя значение крутящего момента двигателя может быть получено на основе сигнала датчика 322 ДВК и частоты вращения двигателя. Кроме того, этот датчик, вместе с измеренной частотой вращения двигателя, может быть использован для оценки расхода подаваемой в цилиндр смеси (в том числе, воздуха). Например, датчик 318 положения коленчатого вала, который также используется в качестве датчика частоты вращения двигателя, может генерировать заранее заданное число равномерно распределенных импульсов на каждый оборот коленчатого вала.
Носитель информации в виде микросхемы 306 постоянного запоминающего устройства может быть запрограммирован с использованием машиночитаемых данных, представляющих собой неизменяемые инструкции, выполняемые микропроцессорным устройством 302 для осуществления по меньшей мере части раскрытых ниже способов, а также для осуществления других вариантов, подразумеваемых, но явным образом не указанных.
Во время эксплуатации каждый цилиндр в двигателе 330 обычно работает по четырехтактному циклу: цикл содержит такт впуска, такт сжатия, такт расширения и такт выпуска. Во время такта впуска, как правило, выпускной клапан 354 закрывается и открывается впускной клапан 352. Воздух поступает в камеру 332 сгорания через впускной коллектор 344, причем поршень 336 имеет возможность двигаться к нижней части цилиндра для увеличения объема в камере 332 сгорания. Положение, при котором поршень 336 находится около нижней части цилиндра в конце своего хода (например, когда камера 332 сгорания имеет наибольший объем), специалисты в данной области, как правило, называют нижней мертвой точкой (НМТ).
Во время такта сжатия впускной клапан 352 и выпускной клапан 354 закрываются. Поршень 336 имеет возможность движения к головке цилиндра, чтобы сжать воздух в камере 332 сгорания. Положение, при котором поршень 336 находится в конце своего хода и расположен ближе всего к головке цилиндра (например, когда камера 332 сгорания имеет наименьший объем), специалисты в данной области, как правило, называют верхней мертвой точкой (ВМТ). В ходе процесса, именуемого в дальнейшем как впрыск, топливо имеет возможность поступать в камеру сгорания. В ходе процесса, именуемого в дальнейшем как зажигание, впрыснутое топливо поджигают каким либо известным способом, например, посредством свечи 366 зажигания, что приводит к сгоранию.
Во время такта расширения расширяющиеся газы толкают поршень 336 назад к НМТ. Коленчатый вал 340 выполнен с возможностью преобразования движения поршня в крутящий момент вращающегося вала. Наконец, во время такта выпуска выпускной клапан 354 открывается для выпуска сгоревшей топливовоздушной смеси в выпускной коллектор 348, и поршень получает возможность вернуться к ВМТ. Следует отметить, что вышеуказанное является только примером, поскольку моменты открытия и закрытия впускного и выпускного клапанов могут изменяться, обеспечивая положительные или отрицательные перекрытия периодов работы клапанов, позднее закрытие впускного клапана или различные другие варианты.
Как раскрыто выше, на фиг. 3 показан один цилиндр многоцилиндрового двигателя, в котором каждый цилиндр может аналогичным образом содержать собственный набор впускных и выпускных клапанов, топливный инжектор, свечу зажигания и т.д.
На фиг. 4 показана схема примера системы 400 привода транспортного средства. Система 400 привода может быть приведена в действие посредством двигателя 330, как показано более подробно на фиг. 3. Например, двигатель 330 может представлять собой бензиновый двигатель. В других примерах могут использоваться другие конфигурации двигателя, например дизельный двигатель. Запуск двигателя 330 может быть выполнен посредством системы запуска двигателя (не показанной на чертеже). Кроме того, двигатель 330 может вырабатывать крутящий момент или регулировать его посредством привода 404 управления крутящим моментом, например посредством топливного инжектора, дросселя, кулачка и т.д.
Крутящий момент, вырабатываемый двигателем, может быть передан гидротрансформатору 406 для приведения в движение ступенчатой автоматической трансмиссии 408, посредством введения в зацепление одной или нескольких муфт, в том числе муфты 410 переднего хода, причем гидротрансформатор может упоминаться как компонент трансмиссии. Гидротрансформатор 406 содержит лопастное колесо 420, выполненное с возможностью передачи крутящего момента турбине 422 посредством гидравлической текучей среды. Одна или несколько зубчатых муфт 424 могут быть введены в зацепление для изменения передаточного отношения между двигателем 310 и колесами 414 транспортного средства. Блокировочная муфта 412 гидротрансформатора может, в свою очередь, управлять выходным крутящим моментом гидротрансформатора 406. Таким образом, когда блокировочная муфта 412 гидротрансформатора полностью расцеплена, гидротрансформатор 406 может передавать крутящий момент в автоматическую трансмиссию 408 посредством переноса текучей среды между турбиной 422 гидротрансформатора и лопастным колесом 420 гидротрансформатора, обеспечивая, таким образом, увеличение крутящего момента. И наоборот, когда блокировочная муфта 412 гидротрансформатора полностью замкнута, вырабатываемый двигателем крутящий момент может быть непосредственно передан через блокировочную муфту 412 гидротрансформатора на входной вал трансмиссии 408. В качестве альтернативы блокировочная муфта 412 гидротрансформатора может быть введена частично в зацепление, что позволяет регулировать крутящий момент, передаваемый трансмиссии. Контроллер 12 может быть выполнен с возможностью регулирования крутящего момента, передаваемого гидротрансформатору, посредством регулирования блокировочной муфты гидротрансформатора в ответ на различные условия работы двигателя или на основе запроса водителя по работе двигателя.
Выходной крутящий момент от автоматической трансмиссии 408 может быть, в свою очередь, передан колесам 414 для обеспечения движения транспортного средства. В частности, автоматическая трансмиссия 408 может регулировать входной крутящий момент во входном валу (не показанном на чертеже) в зависимости от условий движения транспортного средства, до передачи выходного крутящего момента колесам. Скорость транспортного средства можно определить посредством датчика 430 скорости.
Кроме того, колеса 414 могут быть заблокированы посредством взаимодействия с колесными тормозами 416. Например, колесные тормоза 416 могут быть введены во взаимодействие в ответ на нажатие ногой водителя на педаль тормоза (не показанную на чертеже). Аналогичным образом колеса 414 можно разблокировать посредством выведения из взаимодействия колесных тормозов 416 в ответ на отпускание ногой водителя педали тормоза.
На фиг. 5 показан пример блок-схемы системы круиз-контроля транспортного средства. Система 500 круиз-контроля содержит датчики транспортного средства, как показано в блоке 502. Датчики транспортного средства могут включать в себя, но не ограничиваясь этим, датчики для определения крутящего момента источника движущей силы транспортного средства, датчики скорости, потребления энергии или расхода топлива, условий окружающей среды, устройств измерения расстояния, сигналов GPS, дорожных условий и входных воздействий водителя. Входные воздействия водителя могут содержать требуемую скорость транспортного средства, положение педали тормоза, положение педали акселератора, верхний порог скорости транспортного средства и нижний порог скорости транспортного средства. Информация датчика транспортного средства может представлять собой входные данные для электронного горизонта 510, ограничений 508 контроллера, модели 512 динамики транспортного средства, прогнозирующего оптимизатора 530 круиз-контроля на основе модели, блока 504 параметрической адаптации по рекурсивному методу наименьших квадратов, модели 514 потребления топлива транспортным средством, модели 516 крутящего момента двигателя и модели 518 ведущего транспортного средства.
Блок 510 электронного горизонта может входить в состав контроллера 12, показанного на фиг. 1, или может входить в состав системы 140 определения положения транспортного средства, показанной на фиг. 1. Электронный горизонт может состоять из массива областей памяти или вектора данных, причем массив может содержать множество значений уклона дороги, которые отображают уклон дороги, по которой движется транспортное средство. Например, электронный горизонт позволяет извлечь значения уклона дороги из базы данных, которая отображает дорожные условия (например, значения уклона, сохраненные в памяти, значения уклона, извлеченные из трехмерной карты поверхности земли). Значения уклона дороги могут содержать уклон дороги при текущем местоположении транспортного средства, а также значения уклона дороги перед транспортным средством на пути следования транспортного средства. Уклон дороги может быть преобразован в дорожный угол. Блок 510 электронного горизонта обновляет массив или вектор значений уклона дороги для выбранных моментов времени и посылает обновленный массив в оптимизатор 530 круиз-контроля. Значения уклона дороги могут быть обеспечены для заранее заданного времени движения в будущем или для заранее заданного расстояния перед транспортным средством.
Система 500 круиз-контроля содержит модель динамики транспортного средства в блоке 512. Модель динамики транспортного средства основана на физике и может быть раскрыта следующим образом:

где m - масса транспортного средства, v - скорость транспортного средства, Fтяг - тяговая сила, определяемая следующим образом:
Fаэро - аэродинамическое сопротивление, определяемое следующим образом:
Fкач - сопротивление качению шины, определяемое следующим образом:
Fкач=mg(k1v2+k2)cosϕ.
Fуклон - сила, обусловленная уклоном и определяемая следующим образом:
Fуклон=mgsinϕ,
где Fторм - сила торможения колеса, ξСП - потери системы привода; RКОЛ - эффективный радиус колеса; γ(G) - передаточное отношение трансмиссии; G - выбранное передаточное отношение; RРПО - результирующее передаточное отношение транспортного средства; Т - тормозящий крутящий момент источника движущей силы; ρ - плотность атмосферного воздуха; А - площадь фронтальной поверхности транспортного средства; Cd - коэффициент аэродинамического сопротивления транспортного средства; g - ускорение свободного падения; k1 и k2 - коэффициенты сопротивления качению шины; ϕ - дорожный угол; t - время; и m - масса транспортного средства.
Модель динамики транспортного средства упрощена до следующего выражения:

где β1-β4 - адаптивные коэффициенты. Упрощение допускает адаптацию с использованием рекурсивного метода наименьших квадратов (РМНК) или посредством другого подходящего метода, использующего коэффициенты β1-β4. Адаптированные параметры улучшают качество модели динамики транспортного средства, и улучшенная модель динамики транспортного средства улучшает производительность прогнозирующего контроллера на основе нелинейной модели. Адаптированные параметры можно регулировать для обеспечения компенсации изменения массы транспортного средства, характеристик ветра, состояния шин и других условий работы транспортного средства. Модель динамики транспортного средства может быть дополнительно расширена посредством добавления коэффициента возмущения dv. Значение dv можно оценивать более часто, чем коэффициенты бета, и, например, его можно оценить посредством расширенного фильтра Калмана.
В блоке 514 система 500 круиз-контроля содержит модель потребления топлива транспортным средством. Модель потребления топлива транспортным средством позволяет оценить потребление топлива и обеспечивает входные данные для оптимизации экономии топлива в блоке оптимизатора 530. Потребление топлива транспортным средством выражено в виде многочлена:

где  - поток топлива к источнику движущей силы транспортного средства; и с0-с5 - адаптивные коэффициенты. Модель потока топлива допускает адаптацию с использованием рекурсивного метода наименьших квадратов (РМНК) или посредством другого подходящего метода, использующего коэффициенты с0-с5. Адаптированные параметры улучшают качество модели потребления топлива транспортным средством, и улучшенная модель потребления топлива транспортным средством улучшает производительность прогнозирующего контроллера на основе нелинейной модели.
- поток топлива к источнику движущей силы транспортного средства; и с0-с5 - адаптивные коэффициенты. Модель потока топлива допускает адаптацию с использованием рекурсивного метода наименьших квадратов (РМНК) или посредством другого подходящего метода, использующего коэффициенты с0-с5. Адаптированные параметры улучшают качество модели потребления топлива транспортным средством, и улучшенная модель потребления топлива транспортным средством улучшает производительность прогнозирующего контроллера на основе нелинейной модели.
В блоке 504 система 500 круиз-контроля содержит блок оценки параметров с использованием рекурсивного метода наименьших квадратов для регулирования коэффициентов β и с для модели динамики транспортного средства и модели потребления топлива транспортным средством. Желательно регулировать коэффициенты β и с, когда условия работы транспортного средства изменяются таким образом, что может быть достигнут требуемый уровень производительности контроллера. Блок оценки с использованием рекурсивного метода наименьших квадратов рекурсивно адаптирует вектор параметров х для удовлетворения набора уравнений (в матричной форме):
yk=Hkx+vk.
Новая оценка параметра:

где Hk - матрица размерности m×n, Kk - коэффициент усиления блока оценки размерности n×m, а yk-Hkxk-1 - поправочный член.
При этом шум vk имеет нулевое среднее значение и ковариацию Rk. Значения коэффициента усиления блока оценки Kk и ковариационной матрицы Pk могут быть обновлены следующим образом:


Блок оценки с использованием рекурсивного метода наименьших квадратов может быть инициализирован следующим образом:
где  если не существует ранее известного значения х, и Р0=0, если значение х известно. Собирают фактические данные о транспортном средстве, используемые в модели динамики транспортного средства и модели потребления топлива транспортным средством, и регулируют коэффициенты модели, используя рекурсивный метод наименьших квадратов.
если не существует ранее известного значения х, и Р0=0, если значение х известно. Собирают фактические данные о транспортном средстве, используемые в модели динамики транспортного средства и модели потребления топлива транспортным средством, и регулируют коэффициенты модели, используя рекурсивный метод наименьших квадратов.
В блоке 516 система 500 круиз-контроля содержит модель крутящего момента двигателя для источника движущей силы транспортного средства. Модель крутящего момента двигателя описывает задержку выработки крутящего момента двигателя относительно времени выработки требуемого крутящего момента двигателя. Модель крутящего момента двигателя может быть выражена следующим образом:

где τ - постоянная времени, выраженная как функция частоты вращения двигателя Nдв и требуемого крутящего момента Ттр; и где Т - выходной крутящий момент источника движущей силы. Требуемый крутящий момент представляет собой функцию трансмиссии с флагом нейтральной передачи или с целочисленной переменной в памяти. В частности, требуемый крутящий момент двигателя:
Ттр=Твх(1-Nфл)+TххNфл,
где Tвх - входной крутящий момент; Nфл - флаг нейтральной передачи (например, 1 для нейтральной передачи и 0 для передачи с взаимодействием шестерен); и Тхх - крутящий момент двигателя на холостом ходу. Частота вращения двигателя также представляет собой функцию трансмиссии с флагом нейтральной передачи:

где Nxx - частота вращения двигателя на холостом ходу, v1 - скорость транспортного средства, а другие переменные раскрыты выше.
В блоке 518 система 500 круиз-контроля содержит модель ведущего транспортного средства или модель транспортного средства, двигающегося перед транспортным средством, работающим в режиме круиз-контроля. Модель ведущего транспортного средства применима для систем, у которых существует информация о транспортного средствах на пути следования данного транспортного средства, работающего в режиме круиз-контроля. Модель ведущего транспортного средства имеет мало информации о ведущем транспортном средстве, но она используется для предсказания времени, когда разрешено ускорение транспортного средства и когда может потребоваться замедление транспортного средства. Ведущее транспортное средство может быть смоделировано следующим образом:
где v1 - фактическая скорость ведущего транспортного средства, а1 - ускорение ведущего транспортного средства и τ1 - постоянная времени, представляющая константу времени для ожидаемого ускорения. Расстояние между ведущим транспортным средством и транспортным средством, работающим в режиме круиз-контроля, может быть выражено следующим образом:
где D1 - расстояние между ведущим транспортным средством и транспортным средством, работающим в режиме круиз-контроля, и v - скорость транспортного средства, работающего в режиме круиз-контроля. Скорость ведущего транспортного средства можно оценить посредством радара транспортного средства, следующего за данным транспортным средством, или лазерного прибора для измерения расстояния.
В блоке 506 система круиз-контроля транспортного средства 500 содержит функцию стоимости. Функция стоимости отображает цели управления или цели для оптимизатора 530. Например, функция стоимости может иметь целью минимизацию расхода топлива, с поддержанием скорости транспортного средства в пределах заранее заданного диапазона скоростей транспортного средства, ограниченного верхней скоростью транспортного средства и нижней скоростью транспортного средства, что позволяет сохранять минимальное расстояние между транспортными средствами и ограничить выработку крутящего момента движущей силы транспортного средства до значения, которое меньше порогового крутящего момента. Подробности одного примера функции стоимости раскрыты на шаге 708, показанном на фиг. 7.
В блоке 508 определяют эксплуатационные ограничения системы 500 круиз-контроля, полученные в результате входных воздействий от водителя и/или от переменных или функций, сохраненных в памяти. Например, водитель может ввести требуемую скорость транспортного средства, и верхний и нижний пороги скорости транспортного средства могут быть определены на основе требуемой скорости транспортного средства. Например, водитель может ввести требуемую скорость транспортного средства 100 км/ч, и может быть определен верхний порог скорости 110 км/ч и нижний порог 90 км/ч посредством прибавления или вычитания значения смещения из требуемой скорости транспортного средства. В других примерах система транспортного средства может регулировать верхний порог скорости транспортного средства на основе разрешенной скорости движения по дороге. Например, если водитель выбирает требуемую скорость транспортного средства 90 км/ч, и ограничение скорости на дороге составляет 100 км/ч, верхний порог скорости транспортного средства может быть установлен равным 100 км/ч. Максимальный крутящий момент источника движущей силы и минимальная дистанция следования за транспортным средством могут быть заданы заранее и сохранены в памяти. В качестве альтернативы водитель может ввести ограничивающие значения. Кроме того, требуемую скорость транспортного средства и ограничения по скорости могут временно регулировать посредством применения водителем педали акселератора.
Система 500 круиз-контроля также использует информацию о графике включения понижающей передачи трансмиссии для предотвращения перехода на более низкую передачу, когда скорость транспортного средства можно поддерживать в пределах верхнего порога и нижнего порога скорости транспортного средства (например, первого порога и второго порога скорости транспортного средства). Например, система 500 круиз-контроля может обеспечивать регулируемый предел крутящего момента силового агрегата, который позволяет ограничить крутящий момент, создаваемый источниками крутящего момента силового агрегата (например, двигателем 330) до значения, меньшего, чем пороговое значение крутящего момента минус значение запаса по крутящему моменту. Другими словами, выходной крутящий момент силового агрегата или крутящий момент на входном валу трансмиссии не должен превышать регулируемый предел крутящего момента силового агрегата или пороговое значение минус значение запаса по крутящему моменту. Значение порога крутящего момента силового агрегата может представлять собой функцию частоты вращения двигателя, атмосферного давления, влажности окружающей среды и температуры двигателя. Значение порога крутящего момента силового агрегата может быть ограничено до меньшего значения, чем крутящий момент входного вала трансмиссии, при котором в трансмиссии, в соответствии с графиком, может быть выполнено переключение на более низкую передачу по сравнению с включенной в данный момент времени передачей трансмиссии. Таким образом, понижение передачи трансмиссии может быть запрещено или предотвращено, когда скорость транспортного средства находится в пределах первого и второго порогов скорости транспортного средства. Управляющая система 500 может запросить графики переключения трансмиссии, сохраненные в памяти контроллера, чтобы определить крутящий момент входного вала трансмиссии, при котором в трансмиссии, в соответствии с графиком, может быть выполнено переключение на более низкую передачу по сравнению с включенной в данный момент времени передачей трансмиссии. В блоке 530 система 500 круиз-контроля использует входные данные от блоков 506-518 для определения оптимальной команды крутящего момента или запроса по выработке к источнику движущей силы транспортного средства. Кроме того, оптимизатор 530 может выборочно отключать передачу переднего хода в трансмиссии, с переключением трансмиссии на нейтральную передачу (при которой, например, не взаимодействуют какие-либо шестерни трансмиссии, что обеспечивает отсоединение источника движущей силы от колес транспортного средства), чтобы транспортное средство могло двигаться по инерции или под уклон, повышая, тем самым, экономию топлива. Для того чтобы поддерживать на текущем уровне или увеличить скорость транспортного средства оптимизатор 530 может выборочно включать передачу переднего хода в трансмиссии после того, как трансмиссия была ранее переключена на нейтральную передачу. Оптимизатор решает проблему оптимизации, используя последовательное квадратичное программирование (см. фиг. 7 для ознакомления с дополнительными подробностями). Дополнительная подробная информация относительно работы оптимизатора раскрыта на фиг. 6А-8.
Оптимизатор также ограничивает крутящий момент входного вала трансмиссии до значения, меньшего, чем крутящий момент, при котором в трансмиссии, в соответствии с графиком, может быть выполнено переключение на более низкую передачу по сравнению с включенной в данный момент времени передачей трансмиссии таким образом, чтобы уменьшить вероятность перехода двигателя в режим работы с более высоким расходом топлива для двигателя. Крутящий момент входного вала трансмиссии может быть ограничен посредством ограничения крутящего момента двигателя. Крутящий момент двигателя может быть ограничен посредством запрещения увеличения воздушного потока в двигатель выше порогового значения потока и/или посредством ограничения опережения зажигания до значения, которое меньше порогового опережения зажигания. Однако если скорость транспортного средства уменьшается до значения, меньшего нижнего порога скорости транспортного средства, то оптимизатор разрешает переключение трансмиссии на более низкую передачу, заменяя предел крутящего момента силового агрегата, который ограничивает крутящий момент, создаваемый источниками крутящего момента силового агрегата, на значение крутящего момента, которое меньше крутящего момента, при котором в трансмиссии, в соответствии с графиком, может быть выполнено переключение на более низкую передачу по сравнению с включенной в данный момент времени передачей трансмиссии. В частности, крутящему моменту силового агрегата разрешают превысить значение, при котором в трансмиссии, в соответствии с графиком, может быть выполнено переключение на более низкую передачу по сравнению с включенной в данный момент времени передачей трансмиссии таким образом, чтобы скоростью транспортного средства можно было более точно управлять для значений между верхним порогом и нижним порогом скорости транспортного средства. Таким образом, крутящий момент силового агрегата может быть ограничен для того, чтобы уменьшить вероятность понижения передачи трансмиссии, кроме тех случаев, когда скорость транспортного средства не находится в пределах требуемого диапазона скорости.
Например, система 500 круиз-контроля может выполнить поиск в графиках переключения трансмиссии, сохраненных в памяти контроллера, чтобы определить, что в трансмиссии происходит переключение на более низкую передачу, когда выходной крутящий момент силового агрегата или крутящий момент входного вала трансмиссии равен 240 Н⋅м при текущей скорости транспортного средства. Система 500 круиз-контроля препятствует тому, чтобы выходной крутящий момент силового агрегата достиг или превысил 240 Н⋅м для того, чтобы можно было избежать или предотвратить переключение передачи в трансмиссии. Избегая такого переключения, двигатель может работать более эффективно и может потреблять меньше топлива. Однако если скорость транспортного средства не находится в пределах диапазона между первой скоростью транспортного средства и второй скоростью транспортного средства, то регулируемый предел крутящего момента силового агрегата могут увеличить до значения, которое больше, чем крутящий момент входного вала трансмиссии, при котором в трансмиссии, в соответствии с графиком, может быть выполнено переключение на более низкую передачу по сравнению с включенной в данный момент времени передачей трансмиссии. В результате переключение передач в трансмиссии может быть выполнено таким образом, чтобы можно было поддерживать требуемую скорость транспортного средства.
В блоке 520 трансмиссию транспортного средства могут переключить на нейтральную передачу таким образом, чтобы транспортное средство начало двигаться по инерции, или, в качестве альтернативы, трансмиссию транспортного средства могут переключить на передачу переднего хода, чтобы ускорить транспортное средство. Трансмиссию транспортного средства могут переключить на нейтральную передачу, уменьшив гидравлическое давление на зубчатую муфту, используя соленоид механизма переключения передач. Трансмиссию транспортного средства могут переключить на передачу переднего хода (например, на 5-ю передачу), посредством приложения давления гидравлической жидкости к зубчатой муфте трансмиссии посредством соленоида механизма переключения передач.
В блоке 522 могут регулировать выходной крутящий момент источника движущей силы транспортного средства. Если источник движущей силы - двигатель, то крутящий момент двигателя могут увеличить посредством регулирования одного или более из следующего: положение дросселя, момент зажигания, момент впрыска топлива и момент или фаза работы кулачка. Если источник движущей силы - электрический двигатель, то крутящий момент электрического двигателя могут регулировать посредством изменения тока, подаваемого на электрический двигатель.
Таким образом, система круиз-контроля, показанная на фиг. 5, обеспечивает подачу команд крутящего момента на источник движущей силы транспортного средства и подачу команд на включение передачи или нейтральной передачи на трансмиссию, для оптимизации экономии топлива, когда транспортное средство работает в режиме круиз-контроля. Контроллер решает задачу управления в режиме круиз-контроля, применяя последовательное квадратичное программирование.
Система на фиг. 1-5 обеспечивает систему транспортного средства, содержащую: транспортное средство, содержащее источник движущего крутящего момента; и контроллер в транспортном средстве, содержащий исполняемые инструкции, сохраненные в долговременной памяти, причем инструкции содержат прогнозирующую программу круиз-контроля на основе адаптивной нелинейный модели, содержащую значение порогового крутящего момента силового агрегата для уменьшения количества переключений трансмиссии при поддержании скорости транспортного средства в диапазоне между первой пороговой скоростью и второй пороговой скоростью транспортного средства. В системе транспортного средства значение порогового крутящего момента силового агрегата представляет собой функцию частоты вращения двигателя, атмосферного давления и влажности. В системе транспортного средства значение порогового крутящего момента силового агрегата представляет собой значение крутящего момента, которое меньше, чем крутящий момент, при котором в трансмиссии возможен переход на более низкую передачу при текущей скорости транспортного средства. Система транспортного средства дополнительно содержит ограничивающее значение выходного крутящего момента силового агрегата, которое меньше порогового крутящего момента силового агрегата. В системе транспортного средства крутящий момент силового агрегата ограничен посредством ограничения воздушного потока в двигатель до значения, которое меньше порогового значения потока.
Система на фиг. 1-5 также обеспечивает систему транспортного средства, содержащую: транспортное средство, содержащее источник крутящего момента для движения; и контроллер в транспортном средстве, содержащий исполняемые инструкции, сохраненные в долговременной памяти, причем инструкции содержат прогнозирующую программу круиз-контроля на основе адаптивной нелинейный модели, содержащую стратегию включения нейтральной передачи трансмиссии и уменьшения количества переключений трансмиссии, причем стратегия имеет возможность ограничения крутящего момента силового агрегата до значения, которое меньше порогового крутящего момента. В системе транспортного средства крутящий момент силового агрегата может быть ограничен посредством ограничения опережения зажигания до значения, которое меньше порогового значения опережения зажигания. В системе транспортного средства стратегия уменьшения количества переключения передач в трансмиссии содержит пороговое значение крутящего момента силового агрегата.
Кроме того, в некоторых примерах система транспортного средства содержит дополнительные инструкции для ограничения выходного крутящего момента силового агрегата до значения, которое меньше порогового крутящего момента силового агрегата. В системе транспортного средства пороговое значение крутящего момента силового агрегата представляет собой функцию частоты вращения двигателя, атмосферного давления и влажности.
На фиг. 6А и 6В показан пример способа 600 для прогнозирующего круиз-контроля на основе адаптивной нелинейной модели с оптимизацией потребления топлива. По меньшей мере части способа 600 могут входить в состав системы, как показано на фиг. 1-5 в виде исполняемых инструкций, сохраненных в долговременной памяти. Инструкции могут обеспечить управляющую программу. Кроме того, способ 600 может содержать способы, показанные на фиг. 7 и 8. Кроме того, способ, показанный на фиг. 6А и 6В, может обеспечить управляющую последовательность, показанную на фиг. 10. Способы, показанные на фиг. 6А-8, могут быть выполнены в режиме реального времени в транспортном средстве, двигающемся по дороге.
На шаге 602 способ 600 инициализирует параметры управления. Параметры управления, которые следует инициализировать в моделях и программах оптимизации, могут включать в себя, но не ограничиваясь этим, текущую скорость транспортного средства, текущий выходной крутящий момент источника движущей силы, текущую частоту вращения источника движущей силы, текущую скорость потребления топлива источника движущей силы, текущий уклон дороги, по которой движется транспортное средство, и выбранную передачу трансмиссии. Способ 600 переходит к шагу 604 после инициализации параметров управления.
На шаге 604 способ 600 определяет, требуется ли режим круиз-контроля. Можно определить, что режим круиз-контроля требуется, в ответ на использование водителем кнопки, выключателя или голосовой команды, указывающей на желание перейти в режим круиз-контроля. Во время режима круиз-контроля выходной крутящий момент источника движущей силы регулируют посредством контроллера 12, чтобы поддерживать скорость транспортного средства в пределах требуемого диапазона скоростей, ограниченного верхним порогом скорости (например, 100 км/ч) и нижним порогом скорости (например, 90 км/ч). Таким образом, выработку крутящего момента транспортного средства регулируют для поддержания требуемой скорости транспортного средства. Можно определить, что режим круиз-контроля не требуется, если водитель применяет тормоз, использует кнопку, выключатель или дает соответствующую голосовую команду. Если способ 600 определяет, что требуется режим круиз-контроля, то ответ «да», и способ 600 переходит к шагу 606. В противном случае ответ «нет», и способ 600 заканчивает свою работу.
На шаге 606 способ 600 получает новые данные от системных датчиков и памяти. Данные датчика могут содержать, но не ограничиваясь этим, скорость транспортного средства, уклон дороги или крутизну дороги, выходной крутящий момент источника движущей силы, потребление топлива или потребление энергии источником движущей силы, частоту вращения источника движущей силы и выбранную в настоящее время передачу трансмиссии. Данные из памяти могут содержать, но не ограничиваясь этим, ограничения для круиз-контроля, требуемую скорость транспортного средства, минимальное расстояние до впереди идущего транспортного средства и параметры настройки контроллера. Способ 600 переходит к шагу 608 после получения новых данных.
На шаге 608 способ 600 пересматривает или обновляет коэффициенты β и с для модели динамики транспортного средства и модели потребления топлива транспортным средством, раскрытые в блоках 512 и 514 на фиг. 5. Коэффициенты β и с регулируют на основе новых данных, полученных на шаге 606 с использованием рекурсивного метода наименьших квадратов, рекурсивного метода наименьших квадратов с экспоненциальной кривой забывания или другого подходящего способа. Пересмотренные модели представляют собой основу для наблюдателей состояния системы, которые также обновляются или пересматриваются на основе пересмотренной модели. Способ 600 переходит к шагу 610 после пересмотра коэффициентов модели.
На шаге 610 способ 600 применяет прогнозирующее управление на основе нелинейной модели для определения оптимальной траектории крутящего момента без переключения на нейтральную передачу. Прогнозирующее управление на основе нелинейной модели применяют к записям об уклоне в электронном горизонте, проходящем от текущего положения транспортного средства до наиболее дальней точки электронного горизонта. Прогнозирующее управление на основе нелинейной модели позволяет создать оптимальные значения крутящего момента на основе ограничения в функции стоимости, раскрытой в блоке 708 на фиг. 7, для записей в электронном горизонте. Способ 600 переходит к шагу 612 после того, как применяет прогнозирующее управление на основе нелинейной модели без переключения на нейтральную передачу.
На шаге 612 способ 600 определяет ожидаемое значение Е0 экономии топлива для горизонта предсказания (например, для данных об уклоне дороги в электронном горизонте) для условий, когда транспортное средство не работает с нейтральной передачей трансмиссии. Например, способ 600 может оценить экономию топлива для блоков (например, для интервала между значениями уклона в электронном горизонте) в электронном горизонте, посредством поиска в модели потребления топлива источником движущей силы или в модели потребления энергии транспортным средством, используя значение оптимального крутящего момента для блока, определенного на шаге 610, и частоты вращения источника движущей силы. Модель потребления энергии транспортным средством хранит полученные опытным путем скорости потребления топлива или энергии. Значение потребления топлива или энергии для блоков сохраняют в памяти, и способ 600 переходит к шагу 614.
На шаге 614 способ определяет максимальное время для включения нейтральной передачи. Значение времени основано на времени, которое необходимо для того, чтобы скорость транспортного средства достигла нижнего порога скорости транспортного средства. Максимальное время определяют, используя текущие условия работы транспортного средства в модели транспортного средства, раскрытой в блоке 512 на фиг. 5, устанавливая тормозящий крутящий момент двигателя равным нулю, и находя значение времени, необходимого для транспортного средства, который движется по инерции или постепенно замедляется, чтобы скорость транспортного средства достигла нижнего порога скорости. Способ 600 переходит к шагу 616 после определения максимального времени для включения нейтральной передачи.
На шаге 616 способ применяет прогнозирующее управление на основе нелинейной модели для нахождения оптимальной траектории крутящего момента с включенной нейтральной передачей. В одном примере прогнозирующее управление на основе нелинейной модели применяют только к первой записи об уклоне в электронном горизонте перед текущем положением транспортного средства, что позволяет ограничить вычислительную нагрузку. Однако в других примерах прогнозирующее управление на основе нелинейной модели могут расширить на длину электронного горизонта, увеличив вычислительную нагрузку контроллера. Прогнозирующее управление на основе нелинейной модели создает переменную управления состоянием трансмиссии, где переменная обеспечивает запрос на включение нейтральной передачи трансмиссии или на включение передачи переднего хода трансмиссии на основе ограничения в функции стоимости, раскрытой в блоке 506 на фиг. 5, для записей в электронном горизонте. Кроме того, прогнозирующее управление на основе нелинейной модели создает значение крутящего момента двигателя на холостом ходу, когда определено, что требуемое состояние представляет собой включение нейтральной передачи. Для блоков в электронном горизонте, соответствующих включению нейтральной передачи, прогнозирующий контроллер на основе нелинейной модели изменяет условия моделирования, что позволяет смоделировать состояние, когда трансмиссия находится в нейтральном положении, а источник движущей силы работает в условиях холостого хода или с низкой выходной мощностью. Прогнозирующее управление на основе нелинейной модели с нейтральной передачей раскрыто более подробно на фиг. 8. Способ 600 переходит к шагу 618 после применения прогнозирующего управления на основе нелинейной модели с включенной нейтральной передачей.
На шаге 618 способ 600 определяет значение Е1 ожидаемой экономии топлива для горизонта предсказания (например, для данных об уклоне дороги в электронном горизонте) для условий, когда транспортное средство работает с трансмиссией в нейтральном положении. В одном примере способ 600 оценивает экономию топлива для блоков (например, для интервала между значениями уклона в электронном горизонте) в электронном горизонте посредством поиска в модели потребления топлива источником движущей силы или в модели потребления энергии транспортным средством, используя значения оптимального крутящего момента для блоков, определенных на шаге 610, и частоты вращения источника движущей силы. Модель потребления энергии транспортным средством хранит полученные опытным путем скорости потребления топлива или энергии. Значения потребления топлива или энергии для блоков в векторе электронного горизонта сохраняют в памяти, и способ 600 переходит к шагу 620.
На шаге 620 способ 600 определяет, требуется ли работа транспортного средства с трансмиссией транспортного средства в нейтральном положении. В одном примере ответ «да», и способ 600 переходит к шагу 622 в ответ на превышение значением Е1 ожидаемой экономии топлива значения Е0 ожидаемой экономии топлива. Другими словами, если работа транспортного средства с включенной нейтральной передачей обеспечивает более высокую экономию топлива в то время, когда скорость транспортного средства находится между верхним порогом скорости и нижним порогом скорости, то ответ «да», и способ 600 переходит к шагу 622. Если значение Е1 ожидаемой экономии топлива меньше, чем значение ожидаемой экономии топлива Е0, или если ожидается, что скорость транспортного средства будет меньше нижнего порога скорости транспортного средства, когда трансмиссия транспортного средства будет находиться в нейтральном положении, то ответ «нет», и способ 600 переходит к шагу 630.
На шаге 622 способ 600 выбирает траекторию управления, при которой трансмиссия транспортного средства находится в нейтральном положении. Траектория представляет собой выходные данные шага 616 и содержит вектор или массив, который требует, чтобы трансмиссия транспортного средства работала в нейтральном положении по меньшей мере в одном блоке электронного горизонта. Траектория также содержит вектор или массив требований крутящего момента для работы источника движущей силы транспортного средства во время работы на холостом ходу или в другом состоянии низкого потребления энергии (например, во время прекращения работы двигателя или во время прекращения вращения мотора). Способ 600 переходит к шагу 632 после выбора требуемой траектории управления.
На шаге 630 способ 600 выбирает траекторию управления, при которой трансмиссия транспортного средства находится в состоянии включенной передачи переднего хода. Траектория представляет собой выходные данные шага 610 и содержит требование крутящего момента для поддержания скорости транспортного средства между значениями верхней пороговой скорости и нижней пороговой скорости транспортного средства. Требование крутящего момента также предусматривает уменьшение потребления топлива транспортным средством. Способ 600 переходит к шагу 632 после выбора требуемой траектории управления.
На шаге 632 способ 600 применяет управляющие действия к приводам и затем ожидает следующего периода дискретизации. Управляющие действия выполняют для работы транспортного средства в блоке электронного горизонта, который соответствует текущему положению транспортного средства. Управляющие действия основаны на траектории, выбранной на шаге 622 или на шаге 630. Если управляющие действия содержат изменение состояния работы трансмиссии транспортного средства с переключением от нейтральной передачи на передачу переднего хода или наоборот, то состояние одной или нескольких муфт трансмиссии может измениться для переключения трансмиссии на нейтральную передачу или на передачу переднего хода. Выработку источника движущей силы транспортного средства могут регулировать в ответ на изменение требуемого крутящего момента источника движущей силы посредством изменения состояния привода крутящего момента, например посредством изменения положения дросселя, момента срабатывания кулачка, опережения зажигания, момента впрыска топлива или количества тока, подаваемого на электрический двигатель. Способ 600 возвращается к шагу 604 после того, как управляющие действия будут применены к транспортному средству.
На фиг. 7 показан подробный пример численного способа для прогнозирующего режима круиз-контроля на основе нелинейной модели. Способ использует последовательное квадратичное программирование (ПКП) для решения задачи нелинейной оптимизации. Итерация с порядковым номером j решающего устройства ПКП может быть записана следующим образом:
где ƒ, S - коэффициенты локальной квадратичной аппроксимации функции J стоимости для значения х.
Новая итерация может быть получена следующим образом:
xj+1=xj+αj⋅Δxj,
где αj - подходящий размер шага. Выбор αj важен для гарантии быстрой сходимости алгоритма. Обычно подходящее значение можно определить, применив алгоритм линейного поиска. Для системы с относительно умеренной нелинейностью размер шага можно выбрать постоянным, но он должен также быть выбран таким образом, чтобы функция стоимости уменьшалась во всех обозримых сценариях.
На шаге 704 способ 700 получает новые данные от шага 606, показанного на фиг. 6А. В качестве альтернативы способ 700 может получить данные из памяти и от датчиков транспортного средства, как раскрыто на шаге 606, показанном на фиг. 6А. Способ 700 переходит к шагу 706 после того, как будут получены новые данные.
На шаге 706 способ 700 выполняет моделирование и линеаризацию. Моделирование и линеаризацию выполняют на моделях, раскрытых для блоков 512-518. Принимают следующее определение нелинейной системы:
где х - состояние системы, u - вход системы, y - выход системы и f и g обозначают функции. Моделирование системы по горизонту предсказания или по электронному горизонту может быть достигнуто посредством решения вышеуказанного обыкновенного дифференциального уравнения численным методом с использованием подходящего метода решения, например, посредством базового метода Эйлера. Один шаг в методе Эйлера в момент времени tk=t0+kTs может быть записан следующим образом:
x(tk+1)≈x(tk)+Ts⋅ƒ(x(tk), u(tk)).
Линеаризация вышеупомянутого обыкновенного дифференциального уравнения в момент времени tk=t0+kTs в точке 
 может быть записана следующим образом:
может быть записана следующим образом:
где
Линеаризованную систему дискретизируют для получения конечной параметризации на входе системы и одного шага предсказания:
Приблизительная дискретизация может быть записана следующим образом:


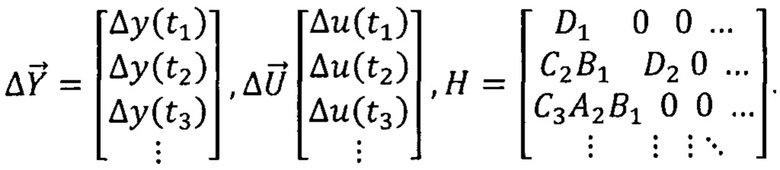
Линеаризацию оценивают на каждом периоде выборки для каждого блока в электронном горизонте или в горизонте предсказания, что позволяет сформировать матрицы Н чувствительности для предсказанной траектории для входов системы. Линеаризованное предсказание выхода системы может быть записано следующим образом:
где
Способ 700 переходит к шагу 708 после выполнения моделирования и линеаризации.
На шаге 708 способ 700 строит задачу квадратичного программирования (КП). Задачу КП строят на основе функции стоимости и ограничений. Например, функция стоимости может быть выражена следующим образом:

где J - переменная функции стоимости, N - горизонт предсказания на основе вектора или массива электронного горизонта, qN - штраф за прослеживание требуемой скорости транспортного средства в конце горизонта предсказания, qmavg - штраф за средний расход топлива на предсказанном горизонте, qvavg - штраф за прослеживание средней скорости транспортного средства и rT - действие команды крутящего момента.
Первый член в функции стоимости представляет собой предельный штраф (скорость транспортного средства в конце горизонта предсказания N). Второй член представляет собой средний расход топлива по горизонту предсказания. Третий член представляет собой среднюю скорость транспортного средства по горизонту предсказания. Наконец, четвертый член представляет собой штраф действия крутящего момента δT(tk)=T(tk)-T(tk-1) или изменение в двигателе или в крутящем моменте источника движущей силы между шагами k. Ограничения функции стоимости могут быть выражены следующим образом:
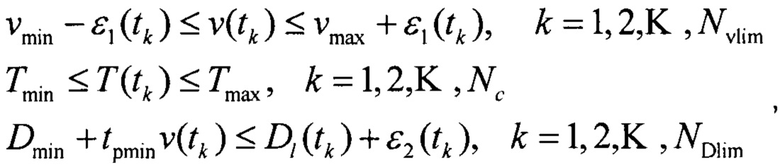
где Nνlim - количество точек предела скорости транспортного средства, NDlim - предел дистанции до идущего впереди транспортного средства в горизонте предсказания, и где ε1(tk) и ε2(tk) - вспомогательные смягчающие переменные. Вспомогательные смягчающие переменные ε1(tk) и ε2(tk) гарантируют выполнимость результирующей задачи нелинейной оптимизации, пределы скорости транспортного средства и предел дистанции до идущего впереди транспортного средства используются как мягкие ограничения посредством введения вспомогательных смягчающих переменных ε1(tk) и ε2(tk). Следует отметить, что минимальное расстояние до идущего впереди транспортного средства состоит из двух частей. Первая часть Dmin представляет собой заданное минимальное расстояние, а вторая часть tpminν(tk) параметризуется по времени tpmin, которое представляет заданное минимальное время для преодоления дистанции Dmin между задним и передним транспортного средствами.
Переменная оптимизации J представляет собой траекторию крутящего момента (вместе со смягчающими переменными) по горизонту предсказания. Используют метод блокирования для сокращения количества переменных оптимизации с целью уменьшения объема вычислений в реальном времени и количества выделенной памяти. В результате управляющее действие по регулируемому крутящему моменту источника движущей силы не вычисляют в каждом периоде дискретизации по горизонту предсказания. Вместо этого несколько промежутков времени дискретизации блокируют (группируют) и управляющее действие внутри каждого блока принимают как фиксированное (например, без изменения). Это можно выразить в виде линейного преобразования переменной оптимизации (крутящего момента)
где  - матрица преобразования (блокирования) и траектории крутящего момента
- матрица преобразования (блокирования) и траектории крутящего момента


где  - общее количество блоков и b - вектор длины, определяющей количество элементов в каждом отдельном блоке. Вектор
- общее количество блоков и b - вектор длины, определяющей количество элементов в каждом отдельном блоке. Вектор  становится новой переменной оптимизации, заменяющей исходную траекторию
становится новой переменной оптимизации, заменяющей исходную траекторию  . Способ 700 переходит к шагу 710 после построения задачи КП.
. Способ 700 переходит к шагу 710 после построения задачи КП.
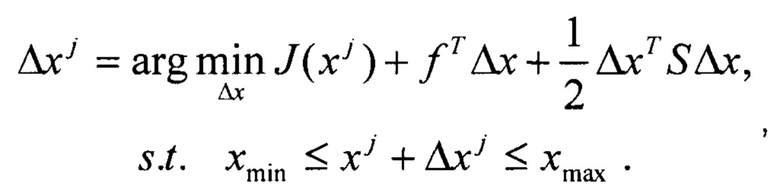
На шаге 710 способ 700 решает задачу КП. Окончательное приближение КП на j-ой итерации ПКП может быть раскрыто следующим образом:

где  - траектория, j - итерация,
- траектория, j - итерация,  - вектор смягчающих переменных для ограничения скорости транспортного средства, где vmin≤εv(tk)≤vmax,
- вектор смягчающих переменных для ограничения скорости транспортного средства, где vmin≤εv(tk)≤vmax,  - вектор смягчающих переменных для предела расстояния до идущего впереди транспортного средства, где Dmin≤εD(tk), Jj - функция стоимости для j-ой итерации как раскрыто выше,
- вектор смягчающих переменных для предела расстояния до идущего впереди транспортного средства, где Dmin≤εD(tk), Jj - функция стоимости для j-ой итерации как раскрыто выше,  - функция стоимости, связанная со смягченным пределом скорости транспортного средства, заданная выражением
- функция стоимости, связанная со смягченным пределом скорости транспортного средства, заданная выражением  и
и  - функция стоимости, связанная со смягченным пределом расстояния до идущего впереди транспортного средства, заданная выражением
- функция стоимости, связанная со смягченным пределом расстояния до идущего впереди транспортного средства, заданная выражением  Способ 700 переходит к шагу 712 после решения задачи КП.
Способ 700 переходит к шагу 712 после решения задачи КП.
На шаге 712 способ 700 обновляет или пересматривает решение. Согласно раскрытому выше решающему устройству ПКП, траекторию могут пересмотреть или обновить следующим образом:

Пересмотренная траектория крутящего момента представляет собой исходную точку для следующей (j+1)-ой итерации ПКП. Способ 700 переходит к шагу 714 после пересмотра решения.
На шаге 714 способ 700 определяет, сошлось ли решение к оптимальному решению. В некоторых примерах решение могут сравнить с функцией стоимости. Однако для задач с отдаляющимся горизонтом могут определить, что решение сходится в пределах заранее заданного числа итераций (например, 1 или 2). Если способ 700 определил, что решение сошлось к оптимальному решению, то ответ «да», и способ 700 заканчивает свою работу или возвращается к шагу 610, показанному на фиг. 6А.
Таким образом, способ, показанный на фиг. 7, регулирует команду крутящего момента, подаваемую источнику движущего крутящего момента, в ответ на расстояние между транспортным средством, работающим в режиме круиз-контроля, и двигающимся впереди транспортным средством, то есть перед транспортным средством, работающим в режиме круиз-контроля и с включенной передачей переднего хода. Способ, показанный на фиг. 7, также определяет профиль оптимальной скорости транспортного средства на основе ограничений.
На фиг. 8 показан пример способа для прогнозирующего круиз-контроля на основе нелинейной модели с оптимизацией потребления топлива и выбором нейтральной передачи. Выбор нейтральной передачи относится к контроллеру, имеющему возможность изменения рабочего состояния трансмиссии транспортного средства от передачи переднего хода к нейтральной передаче или наоборот - для повышения экономии топлива в транспортном средстве в режиме круиз-контроля. За счет выдачи команды для переключения трансмиссии на нейтральную передачу можно увеличить или поддерживать на прежнем уровне скорость транспортного средства на ровной дороге или при отрицательных уклонах дороги, поскольку, когда трансмиссия переключена в нейтральное положение, эффект торможения двигателем и некоторые потери в системе привода не могут оказывать сопротивление части гравитационной силы, действующей на транспортное средство.
Рабочее состояние трансмиссии представляет собой бинарную переменную, имеющую возможность принимать значение 0 для трансмиссии, не находящейся в нейтральном положении, и значение 1 для трансмиссии, находящейся в нейтральном положении. Если электронный горизонт или горизонт предсказания состоит из Nd точек, то количество возможных комбинаций рабочего состояния трансмиссии для работы трансмиссии с включенной передачей для обеспечения крутящего момента или с нейтральной передачей равно  Следовательно, алгоритм, показанный на фиг. 8, может быть выполнен
Следовательно, алгоритм, показанный на фиг. 8, может быть выполнен  раз для получения минимума функции стоимости. Однако для уменьшения вычислительной нагрузки контроллера может потребоваться выполнение итераций только один раз для первого блока в электронном горизонте или горизонте предсказания.
раз для получения минимума функции стоимости. Однако для уменьшения вычислительной нагрузки контроллера может потребоваться выполнение итераций только один раз для первого блока в электронном горизонте или горизонте предсказания.
На шаге 804 способ 800 получает новые данные от шага 606, показанного на фиг. 6А. В качестве альтернативы способ 800 может получить данные из памяти и от датчиков транспортного средства, как раскрыто на шаге 606, показанном на фиг. 6А. Способ 800 переходит к шагу 806 после получения новых данных.
На шаге 806 способ 800 выбирает одну или несколько определенных заранее траекторий с нейтральной передачей на электронном горизонте или на горизонте предсказания с подходящими комбинациями нейтральной передачи, имеющими фиксированную продолжительность и начальное положение в электронном горизонте или в горизонте предсказания. Все заранее определенные нейтральные траектории оценивают совместно с соответствующими вычисленными траекториями крутящего момента относительно экономии топлива и нарушения ограничений. На шаге 806 выбирают траекторию, которая не была оценена.
На шаге 808 выполняют процедуру ПКП, как раскрыто на шагах 706-714, показанных на фиг. 7, для определения траектории крутящего момента, соответствующей заранее определенной траектории с нейтральной передачей, выбранной на шаге 806. Кроме того, вычисляют соответствующую оценку Ei экономии топлива на горизонте предсказания и сохраняют ее в памяти, как раскрыто на шаге 612, показанном на фиг. 6А. Нужно отметить, что для оценки нейтральной передачи крутящий момент источника движущей силы устанавливают равным небольшому значению, такому как ноль или значение крутящего момента двигателя на холостом ходу, когда оценка условий нейтральной передачи такова, что потребление энергии или потребление топлива источником движущей силы может быть определено точно. Способ 800 переходит к шагу 810 после выполнения процедуры ПКП.
На шаге 810 способ 800 определяет, были ли оценены все комбинации нейтральной передачи. Если это так, то ответ «да», и способ 800 переходит к шагу 812. В противном случае ответ «нет», и способ 800 возвращается к шагу 806 для оценки следующей траектории с нейтральной передачей.
На шаге 812 способ 800 выбирает траекторию с нейтральной передачей и соответствующую траекторию крутящего момента, которая обеспечивает лучшую экономию топлива из числа комбинаций траекторий с нейтральной передачей. Затем способ 800 заканчивает свою работу или возвращаться к шагу 620, показанному на фиг. 6В.
Таким образом, способ, показанный на фиг. 8, оценивает работу транспортного средства с трансмиссией в нейтральном положении в то время, когда транспортное средство находится в режиме круиз-контроля, без фактической необходимости включения нейтральной передачи для транспортного средства. Оценка, по меньшей мере частично, основана на дорожных условиях, которые как ожидается, будут актуальны для транспортного средства в будущем, причем будущие дорожные условия основывают на карте дорожных условий, сохраненных в памяти.
Способ, показанный на фиг. 6А-8, обеспечивает способ управления транспортным средством в режиме круиз-контроля, в котором: получают в контроллере информацию о транспортном средстве от одного или нескольких датчиков; подают команду крутящего момента в ответ на выходные данные прогнозирующей программы круиз-контроля, основанной на адаптивной нелинейной модели и выполняемой контроллером, причем команда крутящего момента ограничена значением крутящего момента, которое меньше крутящего момента, при котором трансмиссию переключают на более низкую передачу при текущей скорости транспортного средства; и регулируют привод управления крутящим моментом источника движущего крутящего момента в ответ на команду крутящего момента. В способе команда крутящего момента ограничена пороговым значением крутящего момента силового агрегата. В способе пороговое значение крутящего момента силового агрегата представляет собой функцию частоты вращения двигателя, атмосферного давления и влажности. В способе пороговое значение крутящего момента силового агрегата представляет собой значение крутящего момента, которое меньше значения крутящего момента, при котором трансмиссию переключают на более низкую передачу при текущей скорости транспортного средства.
На фиг. 9А показан пример графика выпуклой модели потребления топлива транспортным средством. В некоторых примерах модель потребления топлива транспортным средством может также упоминаться как диаграмма. Вертикальная ось отображает потребление топлива двигателем. Горизонтальная ось отображает крутящий момент двигателя. Наклонная ось отображает частоту вращения двигателя. Модель потребления топлива транспортным средством хранит определенные опытным путем значения потребления или расхода топлива, соответствующие выбранным частотам вращения двигателя и крутящим моментам. Значения расхода топлива формируют выпуклую поверхность при соединении показанным образом, и наблюдаемую со стороны горизонтальной оси. Форма модели потребления топлива транспортным средством может изменяться в зависимости от вида топлива (например, бензина, смеси спирта и бензина, спирта), внешних условий работы двигателя и других условий. Форма модели потребления топлива транспортным средством (например, выпуклая, невыпуклая, аффинная форма) может влиять на выходные данные контроллера, так как оптимальное решение для крутящего момента также оптимизируют для минимального потребления топлива. Форма модели потребления топлива транспортным средством и ожидаемые выходные данные контроллера могут быть определены на основе значений коэффициентов полинома, который описывает модель потребления топлива транспортным средством. Например, если коэффициенты указывают, что модель потребления топлива выпуклая, то контроллер, раскрытый на фиг. 6А-8, обеспечивает требование крутящего момента в узком диапазоне, который варьируется между верхним пороговым крутящим моментом и нижним пороговым крутящим моментом, причем нижний пороговый крутящий момента больше нулевого крутящего момента. Решение для крутящего момента, созданное контроллером, показанном на фиг. 6А-8, может упоминаться как решение для постоянного крутящего момента для выпуклой модели потребления топлива транспортным средством, хотя требуемый крутящий момент в действительности изменяется для поддержания скорости транспортного средства. Запрос крутящего момента в узком диапазоне от контроллера для выпуклой модели потребления топлива транспортным средством, содержит нижний пороговый крутящий момент, который больше нижнего порогового крутящего момента для невыпуклой модели потребления топлива транспортным средством. Кроме того, запрос крутящего момента в узком диапазоне от контроллера для выпуклой модели потребления топлива транспортным средством, содержит верхний пороговый крутящий момент, который меньше верхнего порогового крутящего момента для невыпуклой модели потребления топлива транспортным средством.
На фиг. 9В показан пример графика невыпуклой модели потребления топлива транспортным средством. В некоторых примерах модель потребления топлива транспортным средством может также упоминаться как диаграмма. Вертикальная ось отображает потребление топлива двигателем. Горизонтальная ось отображает крутящий момент двигателя. Наклонная ось отображает частоту вращения двигателя. Модель потребления топлива транспортным средством хранит определенные опытным путем значения потребления или расхода топлива, соответствующие выбранным частотам вращения двигателя и крутящим моментам. Значения расхода топлива формируют невыпуклую поверхность при соединении показанным образом, наблюдаемую со стороны горизонтальной оси. Выходное решение для крутящего момента от контроллера, показанного на фиг. 6А-8, может упоминаться как решение для импульсного и гладкого крутящего момента. Запрос крутящего момента представляет собой имеющие форму импульса колебания от нулевого крутящего момента, запрошенного для колес транспортного средства, к более высоким значениям крутящего момента, по сравнению со значениями для того же самого маршрута, выполняемого на том же самом транспортном средстве, но когда модель потребления топлива транспортным средством выпукла. Таким образом, для того же самого транспортного средства, двигающегося по тому же самому маршруту при тех же самых условиях за исключением формы модели потребления топлива, контроллер, показанный на фиг. 6А-8, создает решение для постоянного крутящего момента для выпуклой модели потребления топлива транспортным средством, а также решение для импульсного и гладкого крутящего момента для невыпуклой модели потребления топлива транспортным средством. Решение для импульсного и гладкого крутящего момента требует нулевой крутящий момент для колес транспортного средства в то время, когда транспортное средство движется по инерции или замедляется. Использование нейтральной передачи может быть особенно полезно для невыпуклых моделей потребления топлива, поскольку нейтральная передача может увеличить продолжительность использования гладкого или нулевого крутящего момента. Решение для импульсного и гладкого крутящего момента также требует больших крутящих моментов, чем решение для постоянного крутящего момента. Таким образом, решение для крутящего момента, полученное от контроллера (например, постоянный крутящий момент или импульсный и гладкий), может быть определено в зависимости от формы модели потребления топлива транспортным средством.
На фиг. 10 показан пример управляющей последовательности для режима круиз-контроля транспортного средства, для системы, показанной на фиг. 1-5, и для способа, показанного на фиг. 6А-8. Вертикальные маркеры Т1-Т4 отображают значимые моменты времени для этой последовательности. Процессы на всех графиках происходят в одно и то же время и при тех же самых условиях работы транспортного средства. В режиме круиз-контроля команду крутящего момента для колес транспортного средства или требование крутящего момента для источника движущей силы обеспечивают посредством контроллера, без участия водителя. Контроллер имеет цели в режиме круиз-контроля, которые влияют на требование крутящего момента, выдаваемое контроллером, и эти цели могут быть, по меньшей мере частично, определены теми ограничениями, которые минимизируют потребление топлива, поддерживают скорость транспортного средства в пределах верхнего и нижнего порогов скорости, где указанные пороги определяют требуемый диапазон скоростей транспортного средства, выгоду от использования нейтральной передачи, максимальную продолжительность использования нейтральной передачи и максимальный крутящий момент колес. Контроллер может изменять требование крутящего момента в режиме круиз-контроля для того, чтобы поддерживать скорость транспортного средства в пределах требуемого диапазона скоростей транспортного средства без входных сигналов в контроллер от водителя или без требования водителя крутящего момента, получаемого от источника движущей силы. Таким образом, команда крутящего момента в режиме круиз-контроля может быть основана на требуемой скорости транспортного средства, запрошенной водителем. Контроллер может регулировать крутящий момент источника движущего крутящего момента для обеспечения требуемой скорости транспортного средства.
Первый график сверху на фиг. 10 представляет собой график расчетной максимальной продолжительности использования нейтральной передачи относительно времени. Максимальная продолжительность использования нейтральной передачи соответствует количеству времени, в течение которого трансмиссия может находиться в нейтральном положении, при одновременном поддержании скорости транспортного средства в пределах требуемого диапазона скоростей транспортного средства. Максимальную продолжительность использования нейтральной передачи могут оценить посредством модели, как раскрыто в способе, показанном на фиг. 6А-8. Горизонтальная ось отображает время, которое увеличивается от левой стороны графика к правой стороне графика. Вертикальная ось отображает максимальную продолжительность использования нейтральной передачи, которая увеличивается в направлении стрелки вертикальной оси. Горизонтальная линия 1002 показывает пороговое значение максимальной продолжительности использования нейтральной передачи, при превышении которого трансмиссия может быть переключена посредством команды на нейтральную передачу, если трансмиссия находится в состоянии зацепления.
Второй график сверху на фиг. 10 представляет собой график расчетной выгоды от использования нейтральной передачи относительно времени. Выгода от использования нейтральной передачи соответствует экономии топлива в то время, когда трансмиссия транспортного средства переключена в нейтральное положение. Выгоду от использования нейтральной передачи могут оценить посредством определения экономии топлива для состояния, когда трансмиссия находится в нейтральном положении. Горизонтальная ось отображает время, которое увеличивается от левой стороны графика к правой стороне графика. Вертикальная ось отображает выгоду от использования нейтральной передачи, значение которой увеличивается в направлении стрелки вертикальной оси. Горизонтальная линия 1004 показывает пороговое значение выгоды от использования нейтральной передачи, при превышении которого трансмиссия может быть переключена посредством команды на нейтральную передачу, если трансмиссия находится в состоянии зацепления.
Третий график сверху на фиг. 10 представляет собой график состояния трансмиссии относительно времени. Состояние трансмиссии указывает, находится ли трансмиссия в нейтральном положении или в состоянии зацепления. Горизонтальная ось отображает время, которое увеличивается от левой стороны графика к правой стороне графика. Вертикальная ось отображает состояние трансмиссии. Трансмиссия находится в нейтральном положении, когда график расположен на более высоком уровне около стрелки вертикальной оси. Трансмиссия находится в состоянии зацепления, когда график расположен на более низком уровне около горизонтальной оси.
Четвертый график сверху на фиг. 10 представляет собой график скорости транспортного средства относительно времени. Горизонтальная ось отображает время, которое увеличивается от левой стороны графика к правой стороне графика. Вертикальная ось отображает скорость транспортного средства, где которая увеличивается в направлении стрелки вертикальной оси. Горизонтальная линия 1006 показывает нижний порог скорости транспортного средства. Цель контроллера круиз-контроля транспортного средства состоит в том, чтобы поддерживать скорость транспортного средства выше порога 1006 в то время, когда транспортное средство находится в режиме круиз-контроля.
В момент времени Т0 транспортное средство находится в режиме круиз-контроля. Максимальная продолжительность использования нейтральной передачи увеличивается от среднего уровня, и скорость транспортного средства уменьшается от более высокого уровня в пределах требуемого диапазона скоростей транспортного средства в режиме круиз-контроля. Такие условия могут быть показательными для транспортного средства, приближающегося к вершине холма. Выгода от использования нейтральной передачи увеличивается от более низкого уровня, и в трансмиссии включена передача переднего хода.
Между моментами времени Т0 и Т1 скорость транспортного средства продолжает уменьшаться, и максимальная продолжительность использования нейтральной передачи увеличивается до значения выше порога 1002. Выгода от использования нейтральной передачи остается ниже порога 1004, и трансмиссия остается в режиме включенной передачи переднего хода. Состояние трансмиссии не изменяется даже с учетом того, что максимальная продолжительность использования нейтральной передачи иногда превышает порог 1002, так как выгода от использования нейтральной передачи не превышает порог 1004.
В момент времени Т1 состояние трансмиссии изменяется от передачи переднего хода на нейтральную передачу. Трансмиссию переключают в нейтральное положение в ответ на превышение порога 1002 максимальной продолжительности использования нейтральной передачи и на превышение порога 1004 выгоды от использования нейтральной передачи. Скорость транспортного средства начинает медленно уменьшаться в ответ на переключение трансмиссии в нейтральное положение.
Между моментами времени Т1 и Т2 скорость транспортного средства продолжает уменьшаться, и трансмиссия остается в нейтральном положении. Значение максимальной продолжительности использования нейтральной передачи уменьшается ниже порога 1002, и значение выгоды от использования нейтральной передачи уменьшается ниже порога 1004. Тем не менее, трансмиссию оставляют в нейтральном положении для того, чтобы увеличить выгоду экономии топлива в результате движения под уклон или движения по инерции с нейтральной передачей.
В момент времени Т2 скорость транспортного средства уменьшается до уровня порога 1006, и трансмиссию переключают на передачу переднего хода в ответ на скорость транспортного средства, которая равна или меньше уровня порога 1006. Значение максимальной продолжительности использования нейтральной передачи меньше уровня порога 1002, и выгода от использования нейтральной передачи меньше уровня порога 1004.
Между моментами времени Т2 и Т3 трансмиссия остается в режиме зацепления, то есть, в режиме передачи переднего хода, и скорость транспортного средства увеличивается. Значение максимальной продолжительности использования нейтральной передачи также превышает порог 1002. Значение выгоды от использования нейтральной передачи меньше уровня порога 1004. Трансмиссию не переключают на нейтральную передачу, потому что порог 1004 не превышен.
В момент времени Т3 состояние трансмиссии изменяют от передачи переднего хода на нейтральную передачу. Трансмиссию переключают в нейтральное положение в ответ на увеличение значения максимальной продолжительности использования нейтральной передачи выше уровня порога 1002 и увеличения значения выгоды от использования нейтральной передачи выше уровня порога 1004. Скорость транспортного средства начинает медленно уменьшаться в ответ на переключение трансмиссии на нейтральную передачу.
Между моментами времени Т3 и Т4 скорость транспортного средства продолжает уменьшаться, и трансмиссия остается в нейтральном положении. Значение максимальной продолжительности использования нейтральной передачи уменьшается ниже порога 1002, и значение выгоды от использования нейтральной передачи уменьшается ниже порога 1004. Трансмиссию оставляют в нейтральном положении для того, чтобы увеличить выгоду экономии топлива в результате движения под уклон или движения по инерции с нейтральной передачей.
В момент времени Т4 скорость транспортного средства уменьшается до уровня порога 1006, и трансмиссию переключают на передачу переднего хода в ответ на скорость транспортного средства, которая равна или меньше уровня порога 1006. Значение максимальной продолжительности использования нейтральной передачи меньше уровня порога 1002, и значение выгоды от использования нейтральной передачи меньше уровня порога 1004.
Таким образом, трансмиссию могут выборочно переключать в нейтральное положение, а также из нейтрального положения для увеличения экономии топлива в транспортном средстве. Контроллер транспортного средства выборочно включает нейтральную передачу в зависимости от условий работы транспортного средства и уклона дороги или значения уклона дороги в горизонте предсказания или в электронном горизонте. Контроллер может действовать для переключения трансмиссии на нейтральную передачу в ответ на отрицательный уклон дороги и другие условия работы транспортного средства. Кроме того, контроллер может действовать для переключения трансмиссии на нейтральную передачу в ответ на изменение значения уклона дороги от положительного уклона до отрицательного уклона или до нулевого уклона, как определено по горизонту предсказания или по электронному горизонту.
Следует отметить, что включенные в настоящую заявку примеры алгоритмов управления и оценки могут использоваться с разнообразными конфигурациями систем двигателей и/или транспортных средств. Кроме того, раскрытые в настоящем документе способы могут представлять собой комбинацию действий, выполняемых контроллером в физическом мире, и инструкций, исполняемых внутри контроллера. Программы и способы управления, раскрытые в настоящем документе, могут быть сохранены как исполняемые инструкции в долговременной памяти и выполнены управляющей системой, состоящей из контроллера в сочетании с различными датчиками, приводами и другими средствами двигателя. Конкретные алгоритмы, раскрытые в настоящей заявке, могут представлять собой одну или более стратегий обработки, таких как управляемые по событиям, управляемые по прерываниям, многозадачные, многопоточные и т.п. Таким образом, проиллюстрированные разнообразные действия, операции и/или функции могут быть выполнены в указанной последовательности, параллельно или в некоторых случаях могут быть пропущены. Аналогично, указанный порядок обработки не обязателен для достижения отличительных признаков и преимуществ раскрываемых в настоящей заявке вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или более из иллюстрируемых действий, операций и/или функций могут быть выполнены повторно в зависимости от конкретной применяемой стратегии. Кроме того, раскрытые действия, операции и/или функции могут представлять в графическом виде код, который должен быть запрограммирован в долговременную память машиночитаемой среды хранения данных в управляющей системе двигателя, когда раскрытые действия осуществляются посредством исполнения инструкций в системе, содержащей различные компоненты оборудования двигателя, совместно с электронным контроллером.
Здесь заканчивается раскрытие. Читающим этот документ специалистам в данной области следует учитывать, что возможны многочисленные изменения и модификации без отклонения отдуха и объема настоящего изобретения. Например, преимущества настоящего изобретения могут быть получены в двигателях с конфигурацией цилиндров I3, I4, I5, V6, V8, V10 и V12, с возможностью потребления природного газа, бензина, дизельного топлива или с альтернативными конфигурациями потребления топлива.
В нижеследующей формуле изобретения, в частности, указаны определенные комбинации и подкомбинации компонентов, которые считаются новыми и неочевидными. В пунктах формулы ссылка может быть сделана на «один» элемент или «первый» элемент или на эквивалентный термин. Следует понимать, что такие пункты могут включать в себя один или более указанных элементов, не требуя и не исключая наличие двух или более таких элементов. Иные комбинации и подкомбинации раскрытых отличительных признаков, функций, элементов или свойств могут быть включены в формулу путем изменения имеющихся пунктов или путем представления новых пунктов формулы в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются они более широкими, более узкими, эквивалентными или отличающимися в отношении объема первоначальной формулы изобретения, также считаются включенными в объект настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА (ВАРИАНТЫ) КРУИЗ-КОНТРОЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2719122C2 |
| УПРАВЛЕНИЕ СИЛОВЫМ АГРЕГАТОМ НА ОСНОВАНИИ СНИЖЕНИЯ ЭФФЕКТИВНОСТИ ТОРМОЖЕНИЯ И ТОРМОЗНОЙ СПОСОБНОСТИ | 2017 |
|
RU2688567C2 |
| СИСТЕМА КРУИЗ-КОНТРОЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ЕЕ РАБОТЫ | 2015 |
|
RU2678416C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПТИМИЗАЦИИ ЭНЕРГОПОТРЕБЛЕНИЯ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2014 |
|
RU2640919C2 |
| Способ для управления муфтой гидротрансформатора (варианты) | 2017 |
|
RU2680056C2 |
| МОДУЛЬ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2010 |
|
RU2493025C2 |
| ЭКОНОМИЧНАЯ СИСТЕМА КРУИЗ-КОНТРОЛЯ | 2013 |
|
RU2637564C2 |
| МОДУЛЬ И СПОСОБ, ОТНОСЯЩИЕСЯ К ВЫБОРУ РЕЖИМА ПРИ ОПРЕДЕЛЕНИИ ЗНАЧЕНИЙ КОНТРОЛЬНОЙ ТОЧКИ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2556829C2 |
| СПОСОБ ДЛЯ РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ НА ВЫХОДЕ КОМПРЕССОРА | 2017 |
|
RU2706169C2 |
| СИСТЕМА (ВАРИАНТЫ) И СПОСОБ ДЛЯ РЕГЕНЕРАЦИИ БЕНЗИНОВОГО САЖЕВОГО ФИЛЬТРА | 2016 |
|
RU2689256C2 |
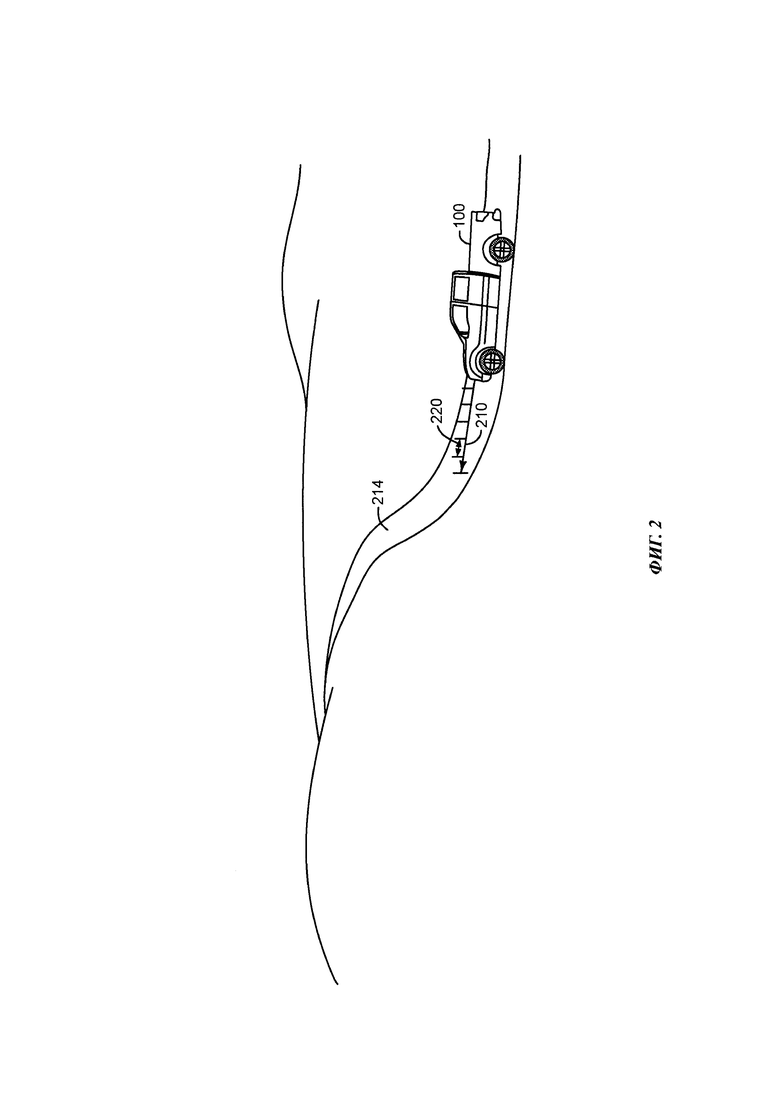
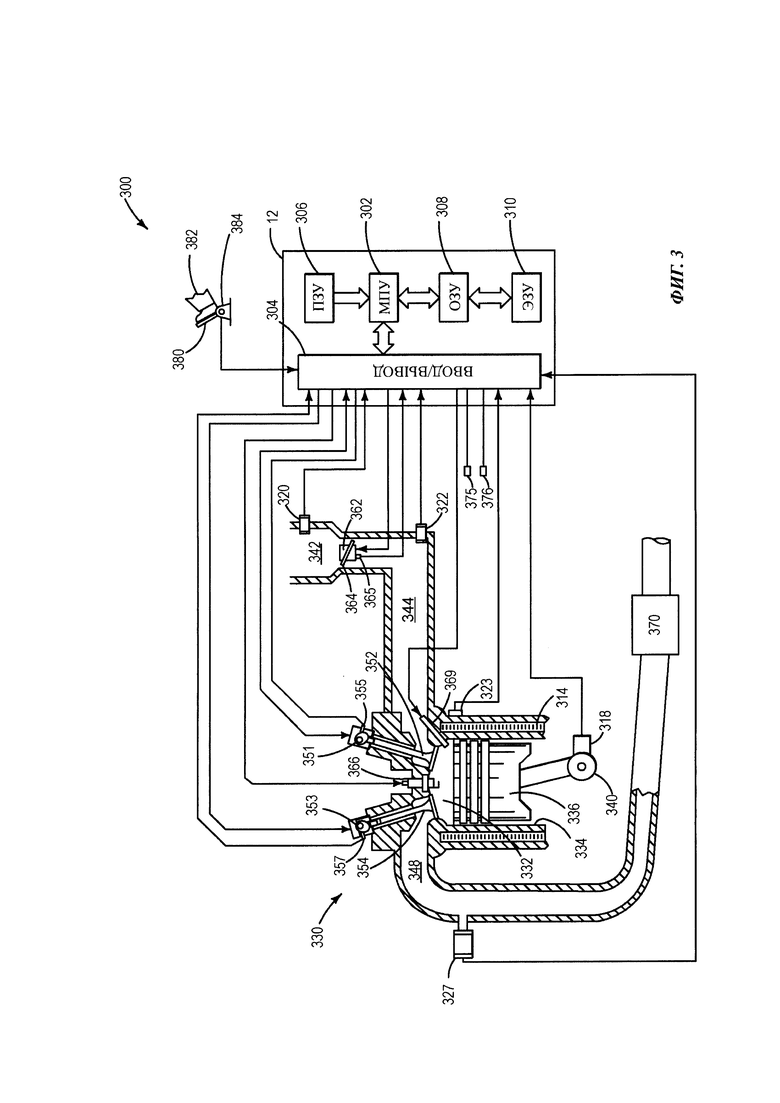
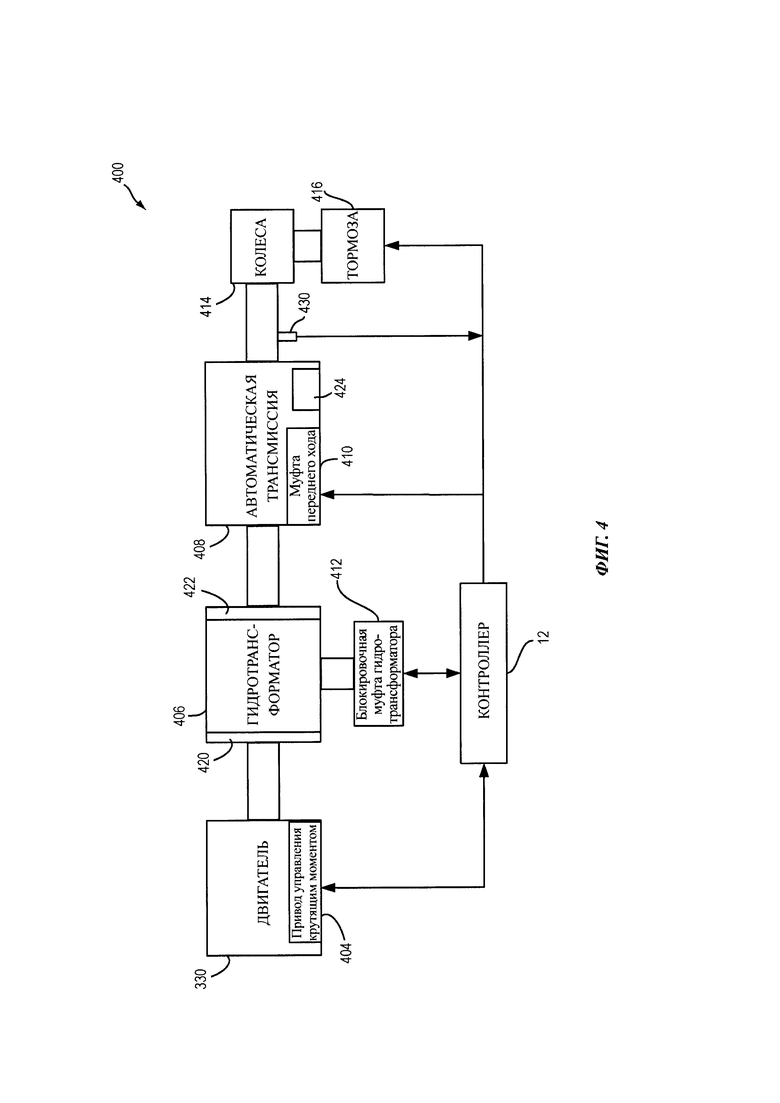
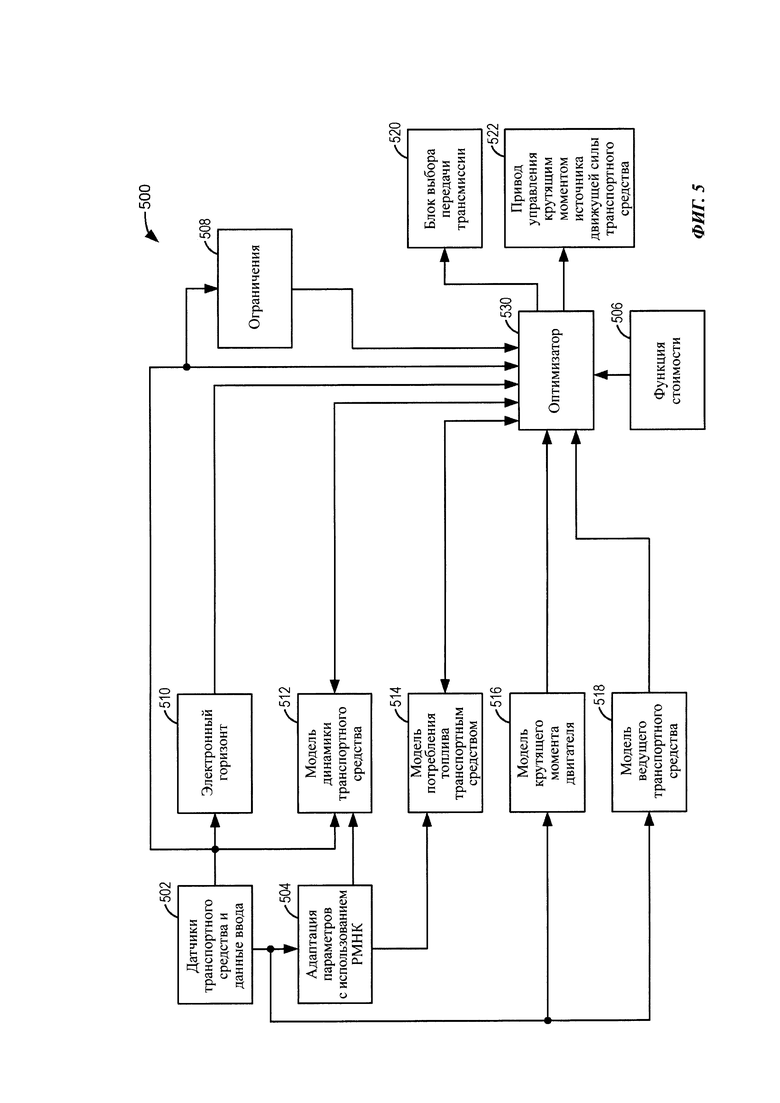
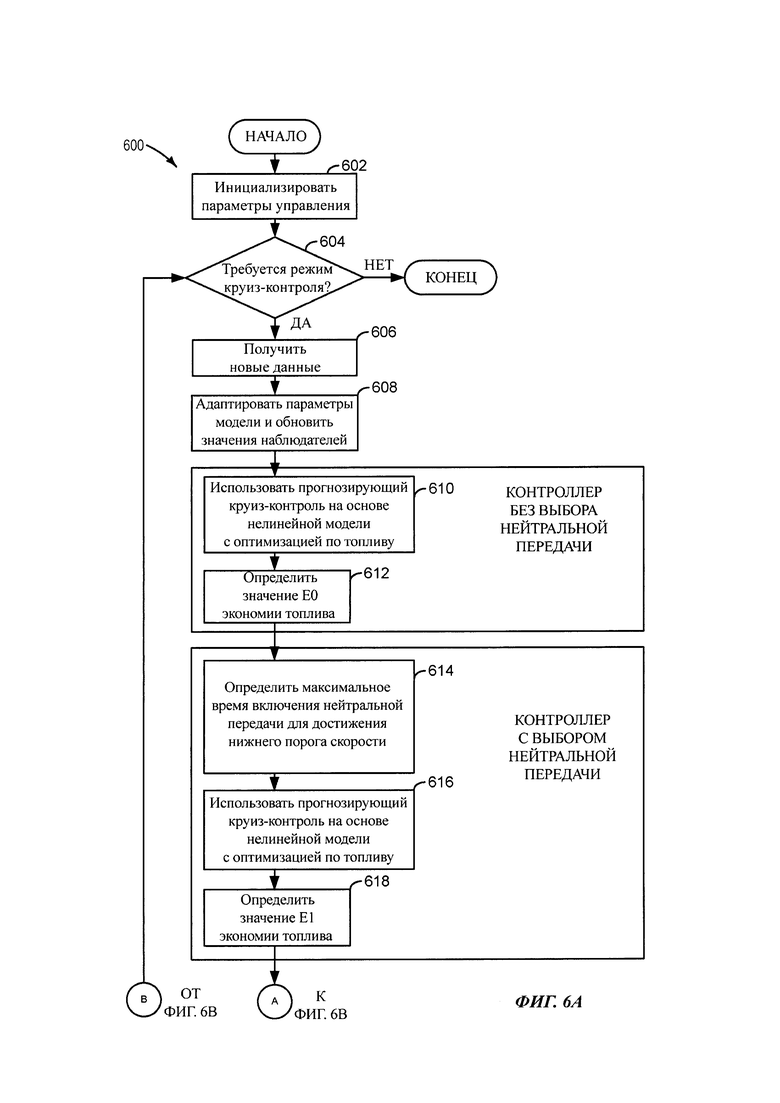
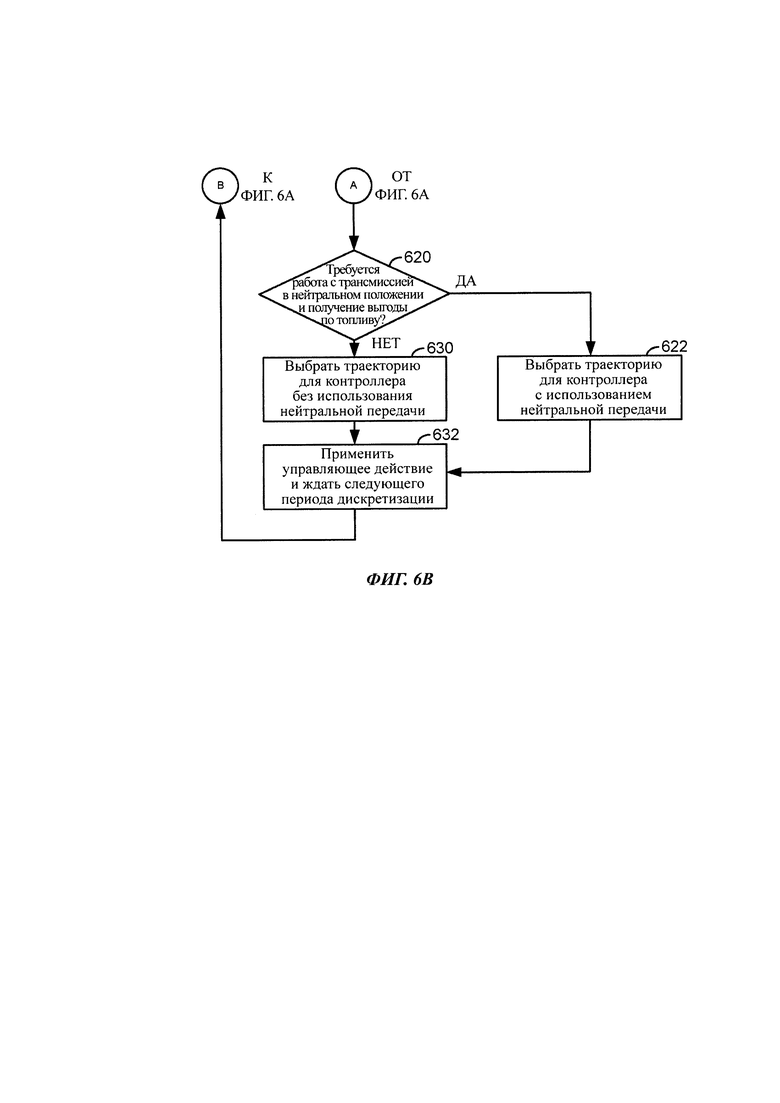
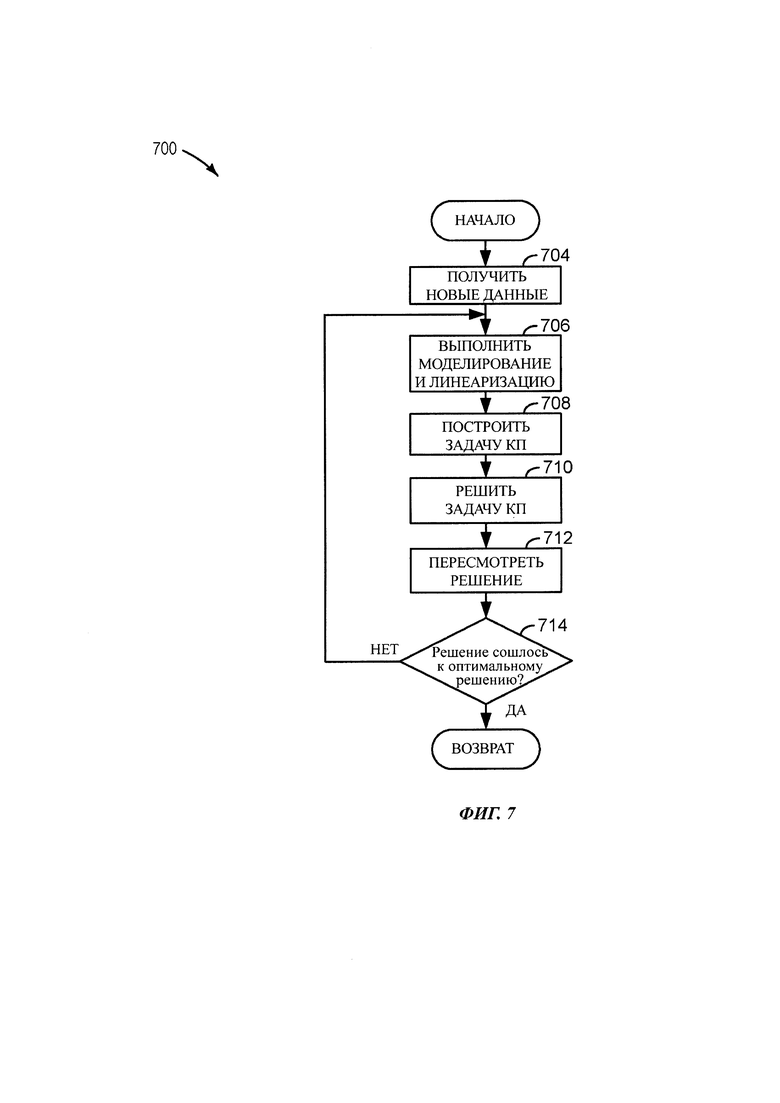
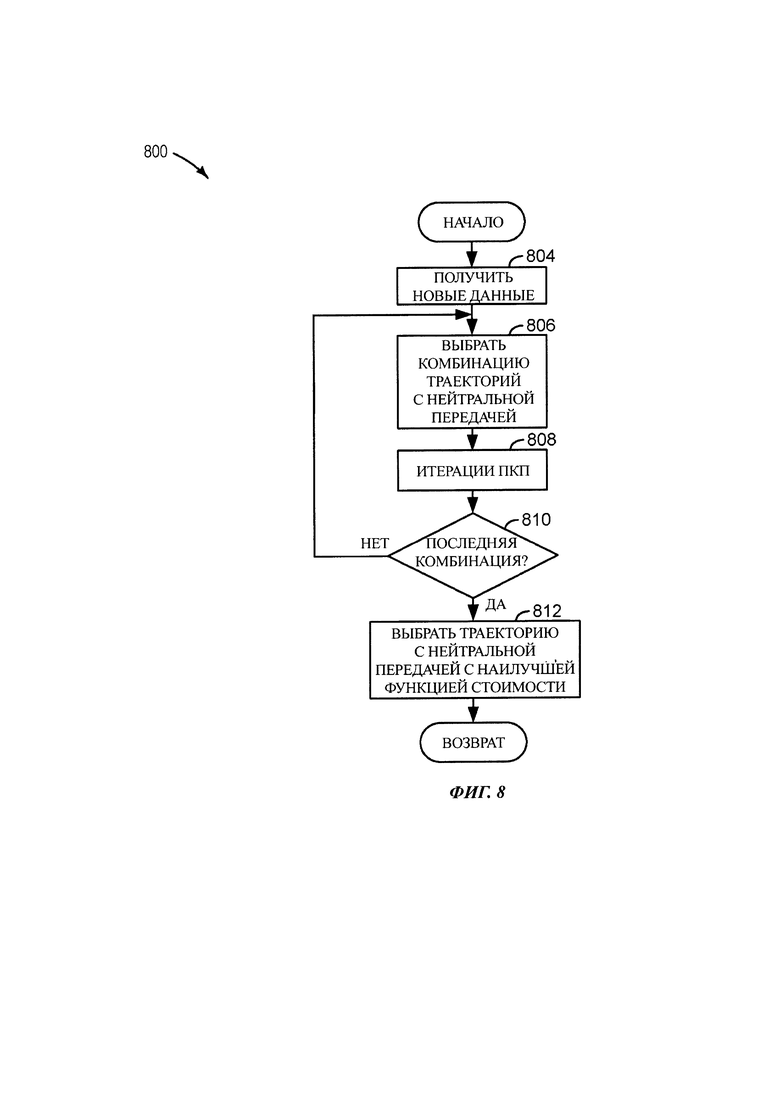
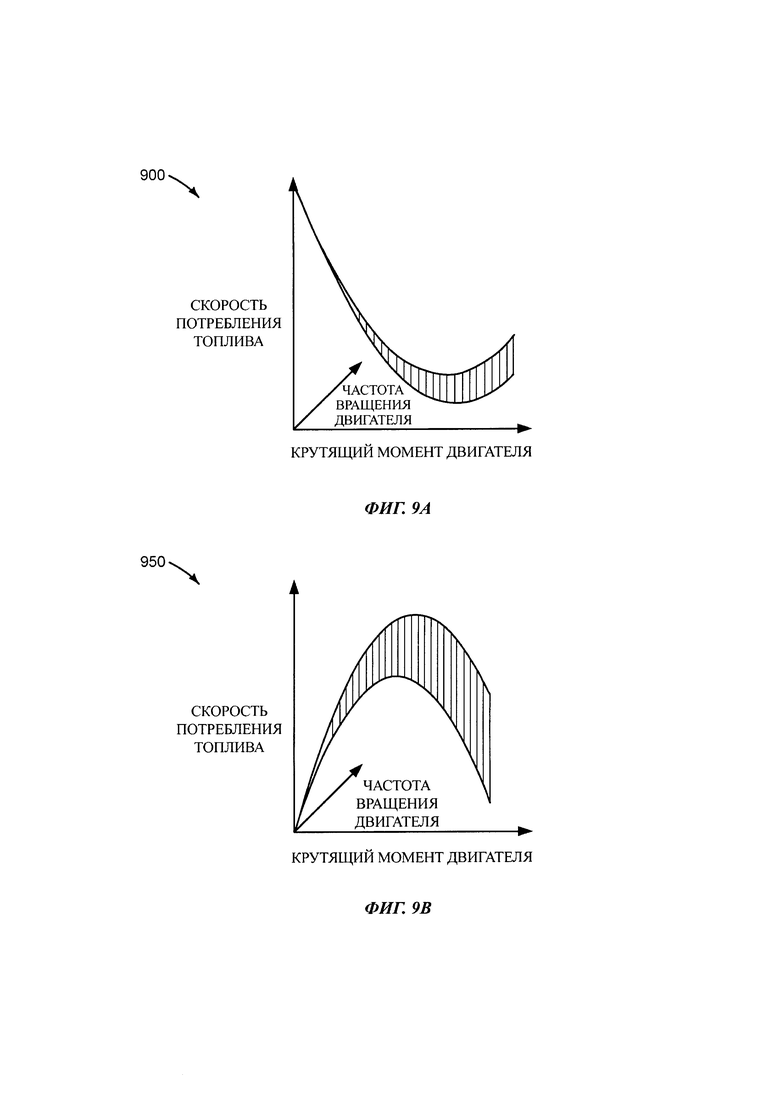
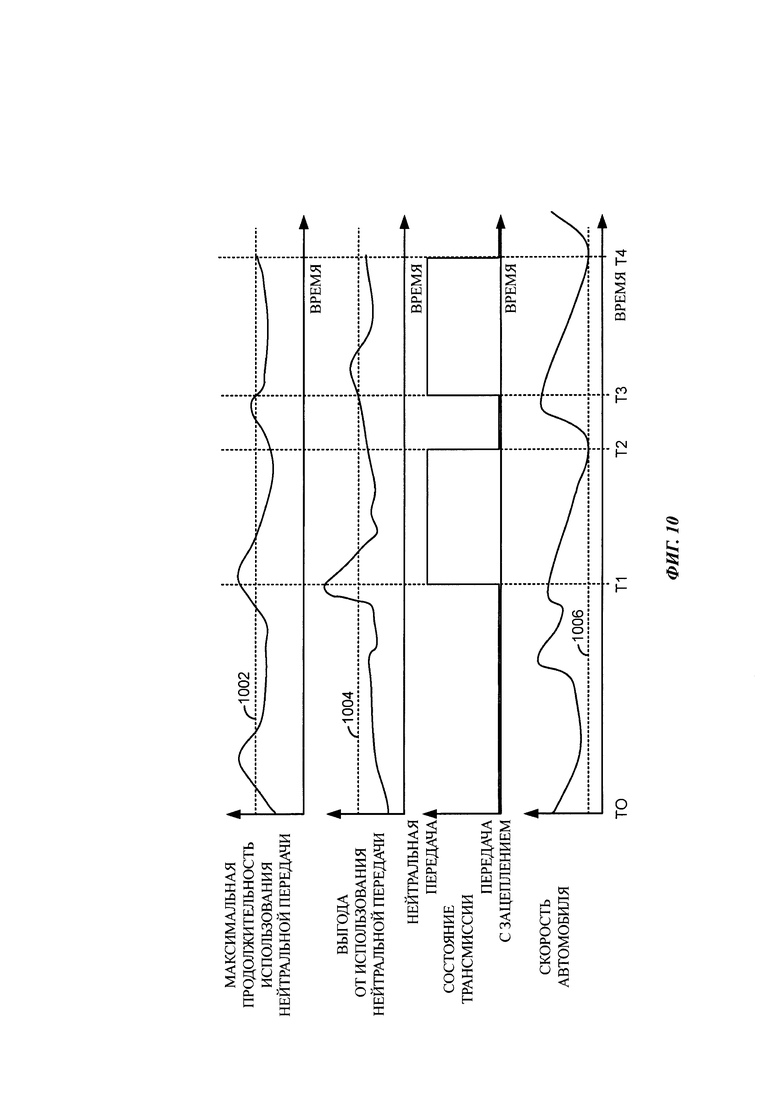
Изобретение относится к круиз-контролю. Система круиз-контроля транспортного средства содержит контроллер для определения скорости транспортного средства и подачи команды крутящего момента в ответ на выходные данные прогнозирующей программы круиз-контроля на основе адаптивной нелинейной модели. Определение команды крутящего момента основано на форме модели потребления топлива транспортным средством. Обеспечивают работу источника движущего крутящего момента для вывода крутящего момента силового агрегата. Крутящий момент силового агрегата ограничен ниже порогового значения крутящего момента силового агрегата. Трансмиссия переключает на более низкую передачу в ответ на крутящий момент силового агрегата, равный или превышающий пороговое значение крутящего момента силового агрегата при указанной определенной скорости транспортного средства. Сокращается расход топлива. 3 н. и 11 з.п. ф-лы, 10 ил.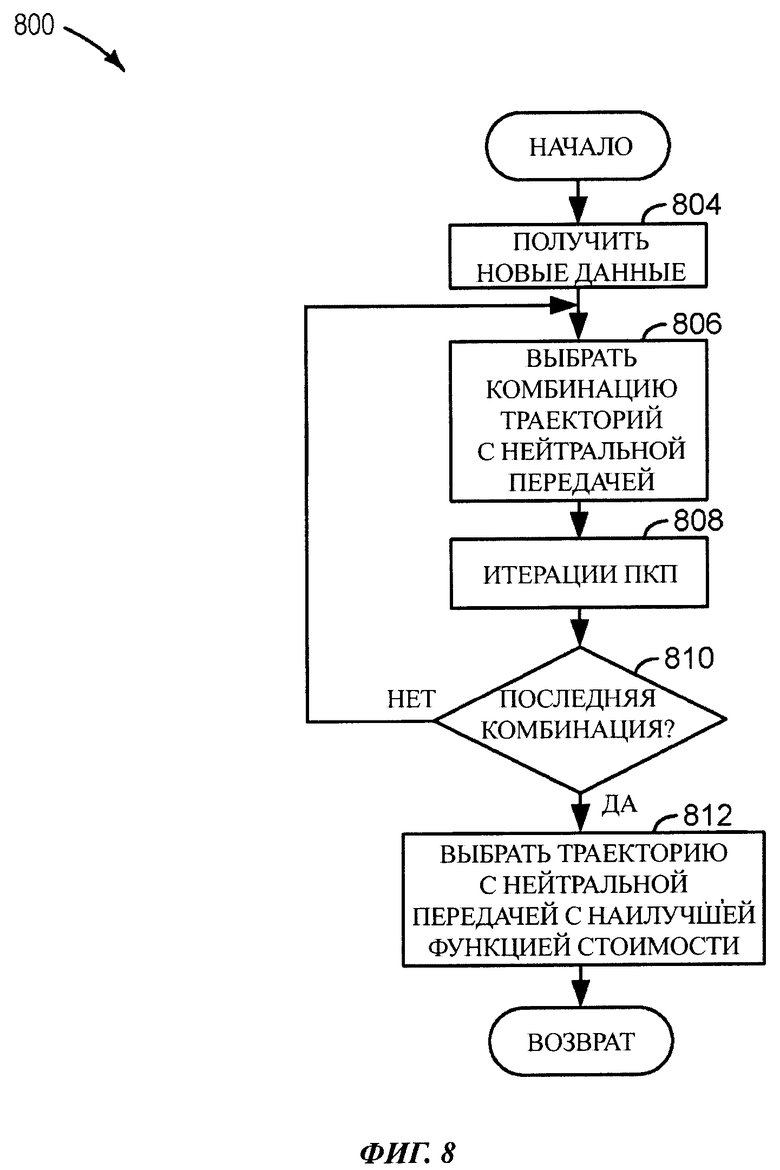
1. Система круиз-контроля транспортного средства, содержащего источник движущего крутящего момента и соединенную с указанным источником движущего крутящего момента трансмиссию, содержащая:
контроллер в транспортном средстве, содержащий исполняемые инструкции, сохраненные в долговременной памяти, при этом контроллер выполнен с возможностью:
определения скорости транспортного средства;
подачи команды крутящего момента источнику движущего крутящего момента в ответ на выходные данные прогнозирующей программы круиз-контроля на основе адаптивной нелинейной модели, причем определение команды крутящего момента основано на форме модели потребления топлива транспортным средством; и
обеспечения работы источника движущего крутящего момента для вывода крутящего момента силового агрегата, причем крутящий момент силового агрегата ограничен ниже порогового значения крутящего момента силового агрегата, причем трансмиссия выполнена с возможностью переключения на более низкую передачу в ответ на крутящий момент силового агрегата, равный или превышающий пороговое значение крутящего момента силового агрегата при указанной определенной скорости транспортного средства.
2. Система по п. 1, в которой контроллер дополнительно выполнен с возможностью адаптации модели потребления топлива транспортным средством.
3. Система по п. 1, в которой контроллер дополнительно выполнен с возможностью: обеспечения работы трансмиссии на передней передаче в ответ на выпуклую модель потребления топлива транспортным средством; и обеспечения работы трансмиссии на нейтральной передаче в ответ на невыпуклую модель потребления топлива транспортным средством.
4. Система по п. 1, в которой контроллер дополнительно выполнен с возможностью вывода источнику движущего крутящего момента импульсной формы крутящего момента в ответ на выпуклую модель потребления топлива транспортным средством.
5. Система по п. 1, в которой источник движущего крутящего момента включает в себя двигатель, а ограничение крутящего момента силового агрегата ниже порогового значения крутящего момента силового агрегата включает в себя ограничение воздушного потока в двигатель до значения, которое меньше порогового значения потока.
6. Система круиз-контроля транспортного средства, содержащего источник движущего крутящего момента и соединенную с указанным источником движущего крутящего момента трансмиссию, содержащую нейтральную передачу и переднюю передачу, содержащая:
контроллер в транспортном средстве, содержащий исполняемые инструкции, сохраненные в долговременной памяти, причем контроллер выполнен с возможностью:
определения скорости транспортного средства;
подачи команды крутящего момента источнику движущего крутящего момента в ответ на выходные данные прогнозирующей программы круиз-контроля на основе адаптивной нелинейной модели;
обеспечения работы источника движущего крутящего момента для вывода крутящего момента силового агрегата, причем крутящий момент силового агрегата ограничен ниже порогового значения крутящего момента силового агрегата, причем трансмиссия выполнена с возможностью переключения на более низкую передачу в ответ на крутящий момент силового агрегата, равный или превышающий пороговое значение крутящего момента силового агрегата при указанной определенной скорости транспортного средства;
обеспечения работы трансмиссии на передней передаче в ответ на выпуклую модель потребления топлива транспортным средством; и
обеспечения работы трансмиссии на нейтральной передаче в ответ на невыпуклую модель потребления топлива транспортным средством.
7. Система по п. 6, в которой крутящий момент силового агрегата ограничен посредством регулировки опережения зажигания.
8. Система по п. 6, в которой контроллер дополнительно выполнен с возможностью поддержания скорости транспортного средства между верхним порогом скорости транспортного средства и нижним порогом скорости транспортного средства.
9. Система по п. 8, в которой контроллер дополнительно выполнен с возможностью обеспечения работы источника движущего крутящего момента для вывода крутящего момента силового агрегата, превышающего пороговое значение крутящего момента силового агрегата, в ответ скорость транспортного средства, меньшую, чем нижний порог скорости транспортного средства.
10. Система по п. 9, в которой определение пороговое значение крутящего момента силового агрегата основано на графике переключения передач, хранящемся в долговременной памяти контроллера.
11. Способ управления транспортным средством в режиме круиз-контроля, в котором:
получают в контроллере информацию о транспортном средстве от одного или нескольких датчиков;
определяют скорость транспортного средства;
подают команду крутящего момента в ответ на выходные данные прогнозирующей программы круиз-контроля, основанной на адаптивной нелинейной модели и выполняемой контроллером, причем команду крутящего момента определяют на основе формы модели потребления топлива транспортным средством, причем команда крутящего момента ограничена до значения крутящего момента, которое меньше порогового значения крутящего момента силового агрегата, при котором, в ответ на команду крутящего момента, равного или превышающего пороговое значение крутящего момента силового агрегата, трансмиссию переключают на более низкую передачу при указанной определенной скорости транспортного средства; и
регулируют привод управления крутящим моментом источника движущего крутящего момента в ответ на команду крутящего момента.
12. Способ по п. 11, дополнительно содержащий переключение трансмиссии на более низкую передачу в ответ на скорость транспортного средства ниже нижнего порога скорости транспортного средства.
13. Способ по п. 12, дополнительно содержащий обеспечение работы трансмиссии на передней передаче в ответ на выпуклую модель потребления топлива транспортным средством; и обеспечение работы трансмиссии на нейтральной передаче в ответ на невыпуклую модель потребления топлива транспортным средством.
14. Способ по п. 12, дополнительно содержащий, когда модель потребления топлива транспортным средством невыпуклая,
в ответ на увеличение скорости транспортного средства до верхнего порога скорости транспортного средства, переключение на нейтральную передачу, регулировку привода управления крутящим моментом для создания крутящего момента холостого хода и обеспечение движения транспортного средства накатом; и
в ответ на снижение скорости транспортного средства до нижнего порога скорости транспортного средства, переключение на переднюю передачу, регулировку привода управления крутящим моментом для обеспечения крутящего момента, превышающего крутящий момент холостого хода, и ускорение транспортного средства.
| US 4658929 A, 21.04.1987 | |||
| US 2015165905 А1, 18.06.2015 | |||
| Zeeshan Ali и др | |||
| "Model predictive control with constraints for a nonlinear adaptive cruise control vehicle model in transition manoeuvres", публ | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| US 4580671 A, 08.04.1986. | |||

