Изобретение относится к области навигации летательных аппаратов (ЛА) с использованием комплексного способа навигации, функционально объединяющего инерциальный способ навигации, спутниковый способ навигации и дальномерный способ навигации. Изобретение может быть использовано при осуществлении навигации высокодинамичных ЛА в сложных навигационных условиях при интенсивных маневрах, характеризующихся повышенным уровнем изменчивости состава рабочего созвездия (СРС) навигационных спутников (НС) и рабочего состава наземных радиомаяков (НРМ).
Каждый из упомянутых способов навигации имеет свои достоинства и недостатки.
В инерциальном способе навигации (ИСН) определение местоположения (далее - положения) ЛА осуществляется путем интегрирования навигационных параметров из показаний инерциальных датчиков, например, значений угловой скорости и ускорения [1, 2]. Основное достоинство этого способа заключается в высокой помехоустойчивости, а недостаток - в накоплении ошибок с течением времени. Поэтому ИСН требует периодической коррекции положения ЛА с использованием радиотехнических способов навигации - спутникового и дальномерного. В спутниковом способе навигации (ССН) вычисление навигационных параметров ЛА осуществляется с использованием сигналов N навигационных спутников, формирующих рабочее созвездие [3, 4]. Достоинством ССН является глобальность и высокая точность измерения. Недостатком является низкая помехоустойчивость и высокая, с точки зрения безопасности полета, вероятность отказа. Кроме того, для маневренных ЛА характерна изменчивость СРС спутников из-за больших углов крена и тангажа ЛА (см. Фиг. 1). При этом точность спутниковых навигационных определений положения ЛА существенно падает. Спутниковые определения положения также становятся невозможными, если в зону радиовидимости спутниковой антенны ЛА попадает недостаточное количество НС. При восстановлении горизонтального полета ЛА (при уменьшении углов крена и тангажа) в спутниковой аппаратуре происходит повторный поиск рабочих спутников, слежение за ними, выделение информации и измерение навигационных параметров, по которым определяются псевдодальности (ПД) и псевдоскорости (ПС) относительно каждого радиовидимого НС.
В дальномерном способе навигации (ДСН) вычисление навигационных параметров ЛА осуществляется с использованием сигналов L наземных радиомаяков (НРМ), формирующих рабочую группу. При этом выполняется определение дальностей ЛА до L НРМ путем излучения запросных дальномерных сигналов с борта ЛА, приема этих сигналов на НРМ, формирования и излучения ответных дальномерных сигналов, измерения на борту ЛА времени задержки ответных дальномерных сигналов относительно запросных дальномерных сигналов и определения с помощью данного измерения навигационных параметров ЛА [5]. Этот способ навигации уступает ССН в точности, но имеет преимущество в надежности и помехоустойчивости. Однако ДСН, так же, как и ССН, зависит от маневрирования ЛА и, при больших углах крена и тангажа ЛА, возможно нарушение связи с некоторыми НРМ из-за отсутствия радиовидимости (см. Фиг.1). При организации дальномерного режима используется один комплект бортового оборудования в режиме последовательного частотно-кодового сканирования, а выбор НРМ выполняется без учета ориентации бортовой антенны [6]. Маневрирование ЛА приводит к потере связи с некоторыми НРМ, снижению точности и перерывам в определении положения по ДСН.
Одним из способов повышения точности навигационных определений при маневрировании ЛА является комплексное использование ИСН, ССН и ДСН. Подобное комплексирование рассмотрено в ряде аналогов изобретения.
Полезная модель бортового радиотехнического комплекса навигации и посадки ЛА морского базирования [7] предназначена для обеспечения навигации и управления ЛА, при этом используются следующие навигационные системы: инерциальная навигационная система (ИНС), спутниковая радионавигационная система (СРНС), радиотехническая система ближней навигации (РСБН), соответственно реализующие указанные выше способы навигации (ИСН, ССН, ДСН). Особенность этого комплекса заключается в том, что маяк РСБН может быть установлен на подвижном объекте, а в состав навигационного комплекса ЛА дополнительно включено вычислительное устройство, вырабатывающее выходные сигналы по перестраиваемому в зависимости от условий работы алгоритму. Однако в аналоге не рассмотрено никаких способов оптимального комплексирования навигационных данных и формирования выходных сигналов, не производится коррекция навигационных данных при изменении ориентации ЛА.
В патенте [8] предлагается навигационная система для ЛА, содержащая источники навигационных данных - СРНС, ИНС, дальномерную систему DME или азимутально-дальномерную систему VOR/DME. Эта система предназначена для безопасного полета в сложных метеорологических условиях. Состав оборудования подобен [7], поскольку оборудование РСБН эквивалентно VOR/DME. Однако в этом патенте также не обсуждаются способы оптимального комплексирования навигационных данных и их коррекции при изменении ориентации ЛА.
В заявке [9] рассматривается использование двух способов навигации - ИСН и ССН, с учетом ориентации ЛА. При этом выполняется комплексная оптимальная обработка навигационных данных. Однако целостность системы, основанной на указанных двух способах навигации недостаточна в связи с отсутствием упомянутых выше положительных характеристик, обеспечиваемых дальномерным способом навигации. Кроме того, в [9] не предусмотрена корректировка состава данных с учетом ориентации ЛА, что не позволяет достичь требуемой эффективности предложенного способа даже в части использования ИСН и ССН.
Способ-прототип [10] состоит в том, что предлагается комплексный способ навигации летательных аппаратов (ЛА), предусматривающий для определения положения ЛА использование инерциального, спутникового и дальномерного способов навигации, при этом в инерциальном способе навигации (ИСН) определяют навигационные параметры и положение ЛА по показаниям инерциальных датчиков, в спутниковом способе навигации (ССН) по N навигационным спутникам (НС) производят прием на ЛА сигналов НС, определяют навигационные параметры по ССН с данными о положении ЛА в виде псевдодальностей и псевдоскоростей, а в дальномерном способе навигации (ДСН) производят формирование и излучение запросных дальномерных сигналов на ЛА, прием упомянутых запросных сигналов на наземных радиомаяках (НРМ) с известными координатами, формирование и излучение ответных дальномерных сигналов, прием упомянутых ответных сигналов на ЛА и определяют навигационные параметры в виде дальностей до L НРМ, а далее в бортовом вычислителе формируют комплексные навигационные параметры ЛА из навигационных параметров, определенных по ССН и по ДСН, и формируют комплексную матрицу ошибок ССН и ДСН, с помощью которых оценивают ошибки положения ЛА, определенного по ИСН, и путем коррекции определенного по ИСН положения ЛА определяют уточненное положение ЛА, кроме того, в бортовом вычислителе осуществляют выбор рабочего состава НРМ по уточненному положению ЛА и координатам НРМ из базы данных, сопряженной с бортовым вычислителем, при этом по рабочему составу НРМ проводят соответствующее ему формирование и излучение запросных дальномерных сигналов, а выходные результаты представляют в виде уточненного положения ЛА.
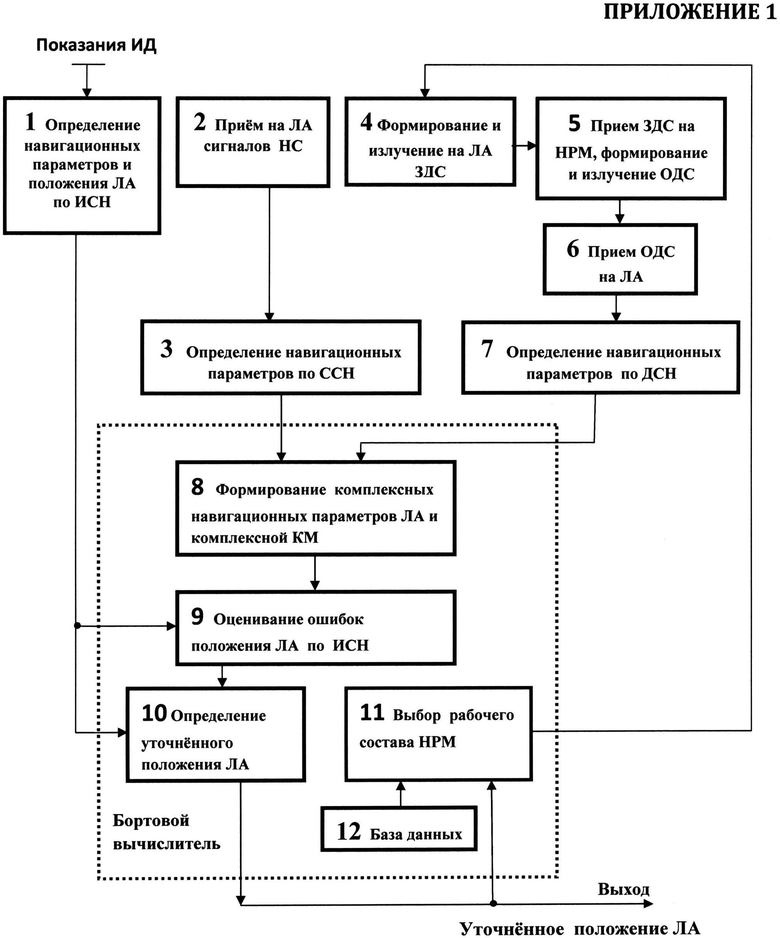
Блок-схема последовательности действий по способу-прототипу [10] приведена в Приложении 1.
Недостатком способа-прототипа [10], как и перечисленных выше аналогов, использующих три способа навигации [7, 8], является отсутствие учета влияния угловой ориентации ЛА при его маневрировании на изменение навигационных данных (состава рабочего созвездия СНС и рабочего состава НРМ) и, соответственно, на работу алгоритма комплексной обработки данных инерциального и радиотехнических способов навигации, приводящее к снижению точности оценивания координат в сложных навигационных условиях. В прототипе [10] и аналогах [7, 8] выбор рабочего созвездия выполняется на основе альманаха спутников и положения ЛА, а выбор рабочего состава НРМ выполняется на основе информации о координатах НРМ из базы данных и, также, положения ЛА. Изменение угловой ориентации ЛА (например, при крене) приводит к нарушению приема сигналов некоторых НС и НРМ.
Задачей заявляемого способа является повышение точности оценивания координат ЛА в сложных навигационных условиях благодаря учету ориентации ЛА при формировании навигационных данных ИСН, ССН и ДСН и их комплексной обработке.
Поставленная задача решается следующим образом. Предлагается комплексный способ навигации летательных аппаратов (ЛА), предусматривающий для определения положения ЛА использование инерциального, спутникового и дальномерного способов навигации, при этом в инерциальном способе навигации (ИСН) определяют навигационные параметры и положение ЛА по показаниям инерциальных датчиков, в спутниковом способе навигации (ССН) по N навигационным спутникам (НС) производят прием на ЛА сигналов НС, определяют навигационные параметры с данными о положении ЛА в виде псевдодальностей и псевдоскоростей, а в дальномерном способе навигации (ДСН) производят формирование и излучение запросных дальномерных сигналов на ЛА, прием упомянутых запросных сигналов на наземных радиомаяках (НРМ) с известными координатами, формирование и излучение ответных дальномерных сигналов, прием упомянутых ответных сигналов на ЛА и определяют навигационные параметры в виде дальностей до L НРМ, а далее в бортовом вычислителе формируют комплексные навигационные параметры ЛА, из навигационных параметров, определенных по ССН и по ДСН, и формируют комплексную матрицу ошибок ССН и ДСН, с помощью которых оценивают ошибки положения ЛА, определенного по ИСН, и путем коррекции определенного по ИСН положения ЛА определяют уточненное положение ЛА, кроме того, в бортовом вычислителе осуществляют выбор рабочего состава НРМ по уточненному положению ЛА и координатам НРМ из базы данных, сопряженной с бортовым вычислителем, при этом по рабочему составу НРМ проводят соответствующее ему формирование и излучение запросных дальномерных сигналов, а выходные результаты представляют в виде уточненного положения ЛА, при этом формируют дополнительную базу данных, включающую диаграммы направленности антенны спутникового приемника и бортовых антенн приемопередатчика дальномерных сигналов, после приема сигналов НС параллельно с определением навигационных параметров по ССН выделяют состав рабочего созвездия и угловые координаты НС, выделяют отношения сигнал/шум спутникового приемника и формируют корреляционную матрицу ошибок ССН, затем формируют векторы направления НС и определяют весовые коэффициенты НС из состава рабочего созвездия по ориентации ЛА, уточненному положению ЛА, угловым координатам НС и диаграмме направленности антенны спутникового приемника, корректируют состав рабочего созвездия спутников по весовым коэффициентам НС, корректируют навигационные параметры по откорректированному составу рабочего созвездия НС, далее формируют ориентированную корреляционную матрицу ошибок ССН, учитывающую ориентацию ЛА, на основе откорректированного состава рабочего созвездия и учета весовых коэффициентов НС, параллельно по ДСН формируют корреляционную матрицу ошибок ДСН, формируют векторы направления и определяют весовые коэффициенты НРМ из рабочего состава НРМ по ориентации ЛА, уточненному положению ЛА, координатам НРМ из рабочего состава НРМ и диаграмме направленности упомянутой бортовой антенны приемопередатчика, корректируют рабочий состав НРМ по весовым коэффициентам НРМ, формируют ориентированную корреляционную матрицу ошибок ДСН, учитывающую ориентацию ЛА, на основе откорректированного рабочего состава НРМ и учета весовых коэффициентов НРМ, формируют соответственно ориентированные навигационные параметры по ССН и ДСН и используют их в бортовом вычислителе для формирования комплексных навигационных параметров, при этом выходные результаты представляются в виде уточненного положения ЛА, откорректированного с учетом ориентации ЛА.
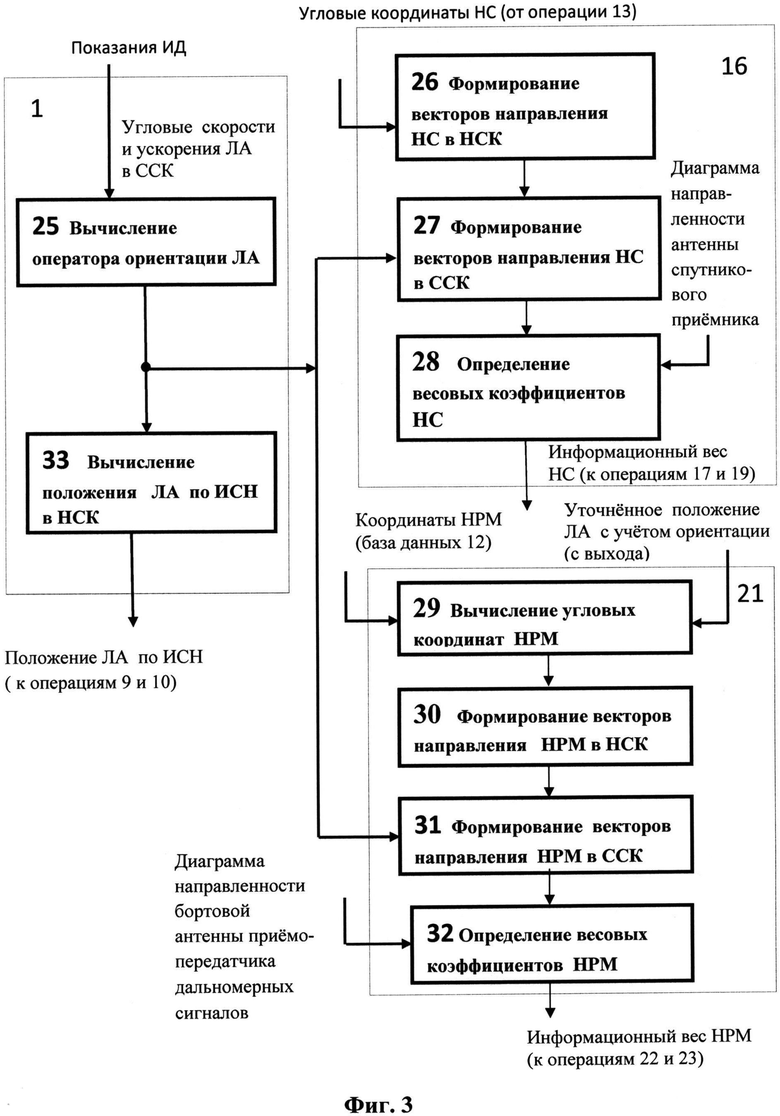
Предлагается вариант способа, раскрывающий операции при формировании данных по ориентации ЛА, который состоит в том, что по показаниям инерциальных датчиков в виде угловых скоростей в связанной системе координат вычисляют в ИСН оператор ориентации, формируют в ССН по угловым координатам НС векторы направления НС в навигационной системе координат, затем, используя оператор ориентации, формируют векторы направления НС в связанной системе координат и, используя диаграмму направленности антенны спутникового приемника, определяют весовые коэффициенты НС, параллельно в ДСН по координатам НРМ из базы данных и уточненному положению ЛА вычисляют угловые координаты НРМ, формируют векторы направления НРМ в навигационной системе координат, затем, используя оператор ориентации, формируют векторы направления НРМ в связанной системе координат и, используя диаграмму направленности бортовой антенны приемопередатчика дальномерных сигналов, определяют весовые коэффициенты НРМ, при этом в ИСН с помощью оператора ориентации вычисляют вектор ускорения ЛА в навигационной системе координат, по которому определяют положение ЛА по ИСН.
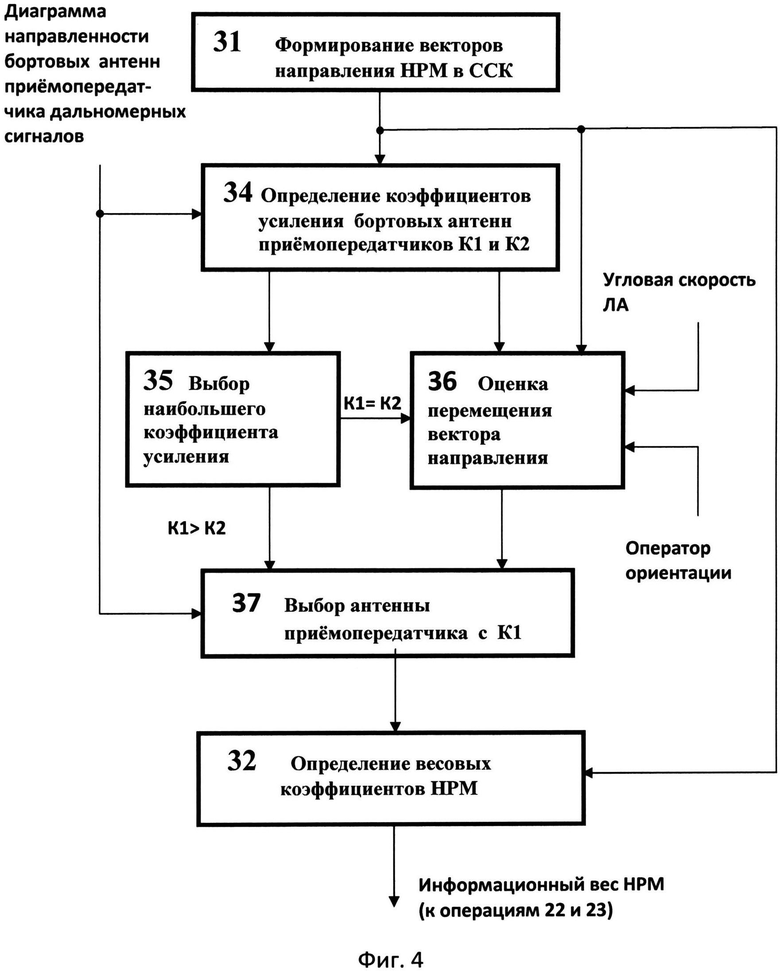
Предлагается также вариант способа, в котором дополнительно после формирования векторов направления НРМ определяют коэффициент усиления каждой из бортовых антенн приемопередатчика дальномерных сигналов и выбирают диаграмму направленности антенны с наибольшим коэффициентом усиления, а при близких коэффициентах усиления упомянутых бортовых антенн выбирают диаграмму направленности антенны в соответствии с перемещением вектора направления НРМ.
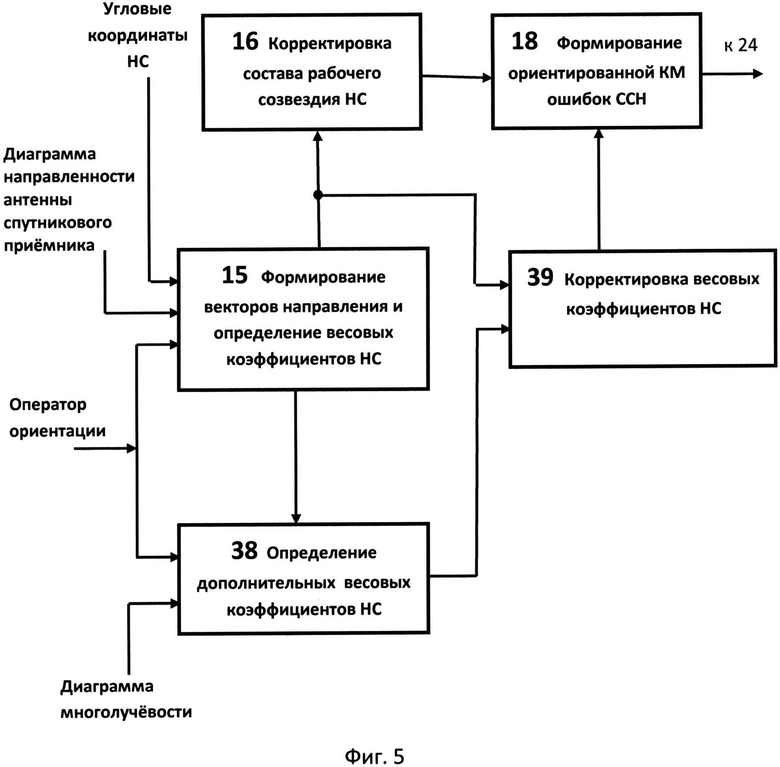
Предлагается также вариант способа, в котором в дополнительную базу данных вводят диаграмму многолучевости ЛА, определяют дополнительные весовые коэффициенты НС из состава рабочего созвездия по ориентации ЛА и упомянутой диаграмме многолучевости, после определения весовых коэффициентов НС проводят корректировку весовых коэффициентов, определяя результирующий весовой коэффициент НС, например, как сумму весового коэффициента и дополнительного весового коэффициента, и вводят при формировании ориентированной корреляционной матрицы ошибок ССН результирующий весовой коэффициент.
Суть заявляемого способа поясняется с помощью Фиг. 1, 2, 3, 4 и 5.
На Фиг. 1 дана иллюстрация относительного положения диаграмм направленности бортовых антенн используемых в ССН и ДСН.
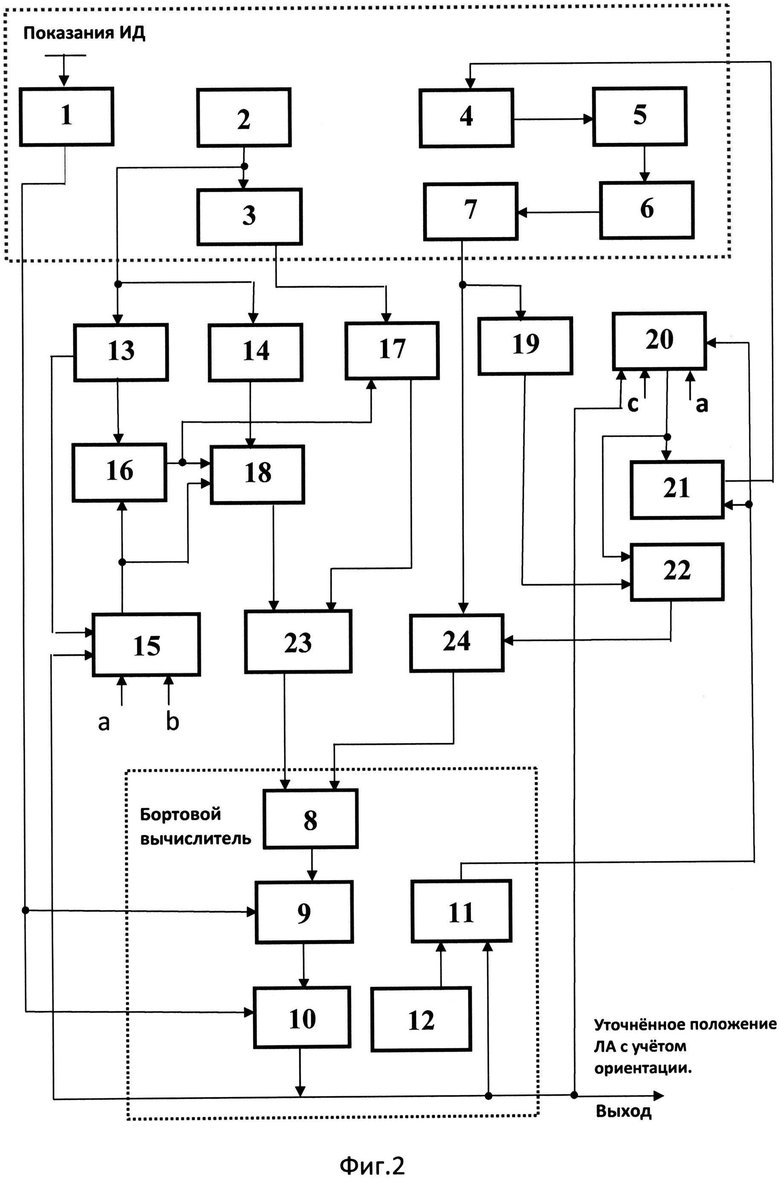
На Фиг. 2 представлена блок-схема основной последовательности операций предложенного способа комплексной навигации ЛА.
На Фиг. 3 раскрыта последовательность операций при формировании данных по ориентации ЛА для определения векторов направления и весовых коэффициентов НС и НРМ.
На Фиг. 4 представлен вариант способа определения весовых коэффициентов НРМ в случае нескольких бортовых антенн приемопередатчика дальномерных сигналов.
На Фиг. 5 представлен вариант способа, учитывающий эффект многолучевости при определении весовых коэффициентов НС.
Кроме того, в Приложении 1 раскрыта блок-схема основной последовательности операций, выполняемых в прототипе, а в Приложении 2 представлены типовые диаграммы направленности бортовых антенн приемопередатчика дальномерных сигналов.
Фиг. 1 иллюстрирует изменение положения центральных осей диаграмм направленности антенн в ССН и ДСН и соответственно изменение информации о навигационных сигналах при изменении ориентации ЛА (в данном случае - угла тангажа).
Суть заявляемого способа поясняется с помощью Фиг. 2, где представлена блок-схема последовательности действий при реализации комплексного способа навигации.
Ниже приведена расшифровка обозначений на Фиг. 2:
1. Определение навигационных параметров и положения ЛА по ИСН.
2. Прием на ЛА сигналов НС.
3. Определение навигационных параметров по ССН с данными о положении ЛА в виде псевдодальностей и псевдоскоростей.
4. Формирование и излучение на ЛА запросных дальномерных сигналов (ЗДС).
5. Прием ЗДС на НРМ, формирование и излучение ответных дальномерных сигналов (ОДС).
6. Прием ОДС на ЛА.
7. Определение навигационных параметров по ДСН (дальности).
8. Формирование комплексных навигационных параметров и комплексной корреляционной матрицы (КМ) по ССН и ДСН.
9. Оценивание ошибок положения ЛА по ИСН.
10. Определение уточненного положения ЛА.
11. Выбор рабочего состава НРМ.
12. База данных.
13. Выделение состава рабочего созвездия и угловых координат НС.
14. Выделение отношений сигнал/шум (с/ш) и формирование КМ ошибок ССН.
15. Формирование векторов направления НС и определение весовых коэффициентов НС.
16. Корректировка состава рабочего созвездия НС.
17. Корректировка навигационных параметров по ССН по откорректированному составу рабочего созвездия.
18. Формирование ориентированной КМ ошибок ССН.
19. Формирование КМ ошибок ДСН.
20. Формирование векторов направления и определение весовых коэффициентов НРМ.
21. Корректировка рабочего состава НРМ.
22. Формирование ориентированной КМ ошибок ДСН.
23. Формирование ориентированных навигационных параметров по ССН.
24. Формирование ориентированных навигационных параметров по ДСН.
Способ включает характерные для способа-прототипа операции (см. Приложение 1 и Фиг. 2): определение навигационных параметров и положения ЛА по ИСН 1, прием на ЛА сигналов НС 2, определение навигационных параметров по ССН с данными о положении ЛА в виде псевдодальностей и псевдоскоростей 3, формирование и излучение на ЛА запросных дальномерных сигналов 4, прием упомянутых запросных сигналов на НРМ, формирование и излучение ответных дальномерных сигналов 5, прием упомянутых ответных сигналов на ЛА 6, определение навигационных параметров по ДСН в виде дальностей до L НРМ 7, формирование в бортовом вычислителе комплексных навигационных параметров ЛА и комплексной корреляционной матрицы ошибок положения ЛА, определенных по ССН и ДСН 8, оценивание ошибок положения по ИСН 9, определение уточненного положения ЛА 10, выбор рабочего состава НРМ 11, базу данных 12.
На входы «а», «b», «с» подаются соответственно следующие сигналы:
a) данные об ориентации ЛА,
b) диаграмма направленности антенны спутникового приемника,
c) диаграмма направленности бортовой антенны приемопередатчика ЗДС.
Предложены операции, реализующие заявленный способ (Фиг. 2). После вычисления навигационных параметров по ССН выполняется выделение состава рабочего созвездия и угловых координат НС 13, выделение отношений сигнал/шум спутникового приемника и формирование КМ ошибок ССН 14, формирование векторов направления и определение весовых коэффициентов НС 15, корректировка состава рабочего созвездия спутников по весовым коэффициентам НС 16, корректировка навигационных параметров по ССН 17, формирование ориентированной КМ ошибок ССН 18, формирование КМ ошибок ДСН 19, формирование векторов направления и определение весовых коэффициентов НРМ 20, корректировка рабочего состава НРМ по весовым коэффициентам НРМ 21, формирование ориентированной КМ ошибок ДСН 22, формирование, соответственно, ориентированных навигационных параметров по ССН 23 и ДСН 24 и использование их в бортовом вычислителе для формирования комплексных навигационных параметров ЛА по ССН и ДСН 8.
Работа заявляемого способа происходит следующим образом.
Действия 1-12 выполняются полностью аналогично прототипу. При этом определение навигационных параметров и положения ЛА по ИСН 1 состоит в интегрировании показаний инерциальных датчиков ИД и подразумевает вычисление пространственных координат ЛА, составляющих вектора скорости и угловых координат [2]. Прием на ЛА сигналов НС 2 завершается определением навигационных параметров по ССН 3, которое подразумевает определение данных о положении в виде псевдодальностей и псевдоскоростей, а также состава рабочего созвездия и отношений сигнал/шум [3, 4]. Для определения навигационных параметров по ДСН 7 выполняется формирование и излучение на ЛА запросных дальномерных сигналов (ЗСД) 4, прием ЗСД на НРМ, формирование и излучение ответных дальномерных сигналов (ОДС) 5, прием ОДС на ЛА 6. При этом определение навигационных параметров по ДСН 7 подразумевает определение временных задержек ОДС относительно ЗДС и вычисление дальностей до НРМ. Обработка навигационных параметров, полученных радиотехническими способами навигации (ССН и ДСН), осуществляется путем формирования комплексных навигационных параметров ЛА из навигационных параметров, определенных по ССН и по ДСН, и формирования комплексной корреляционной матрицы ошибок ССН и ДСН 8, с помощью которых оценивают ошибки положения ЛА, определенного по ИСН, и путем коррекции определенного по ИСН положения ЛА определяют уточненное положение ЛА по ИСН 9. Комплексная обработка использует метод компенсации, реализующий принцип инвариантности к динамике ЛА [11]. С этой целью оцениваются ошибки положения ЛА по ИСН и выполняется компенсация этих ошибок, в результате которой выполняется определение уточненного положения ЛА 10. В вычислителе также выполняется выбор рабочего состава НРМ 11 с использованием базы данных 2, по которому определяется формирование и излучение ЗДС.
Параллельно с определением навигационных параметров по ССН 3 выполняются следующие операции: выделение состава рабочего созвездия и угловых координат НС 13, выделение отношений сигнал/шум и формирование КМ ошибок ССН 14, формирование векторов направления спутников и определение весовых коэффициентов спутников 15 и корректировка состава рабочего созвездия 16.
Выделение состава рабочего созвездия и угловых координат НС 13 выполняется при приеме сигналов 2 в спутниковом приемнике [3, 4]. При формировании векторов направления НС 15 используются данные об ориентации (сигнал «а»), которые можно формировать различными способами. Ниже рассматривается пример, когда используются угловые координаты НС (углы места и азимута) в навигационной системе координат (НСК). Затем формируются векторы направлений НС в связанной системе координат (ССК) с учетом ориентации ЛА (подробнее эти операции будут описаны далее).
При определении весовых коэффициентов спутников 15 используется диаграмма направленности антенны спутникового приемника, установленной на ЛА (сигнал «b»). Диаграмма направленности антенны обычно задается в координатах азимут-угол места (в ССК). После определения векторов направления НС коэффициент усиления антенны спутникового приемника в направлении на спутник Kант.с сравнивается с порогом 
При формировании КМ ошибок ССН учитываются шумовые ошибки измерений псевдодальности (ПД) и псевдоскорости (ПС) в спутниковом приемнике. Оценка точности измерений ПД по отношению к шумовой ошибке в спутниковом приемнике выполняется с помощью формулы для расчета дисперсии ошибки измерения [11]:

где Δf - полоса пропускания системы слежения за задержкой дальномерного кода; τ - длительность элементарного символа кода; В -полоса пропускания спутникового приемника; Q - отношение сигнал/шум, т.е. отношение мощностей сигнала спутника и шума в полосе 1 Гц (величина Q измеряется в спутниковом приемнике).
Например, для ГЛОНАСС τ=2 мкс. При Q=40 дБ Гц, Δf=1 Гц и B=15 МГц имеем среднеквадратичное значение ошибки измерения ПД 2,5 не или 0,75 м.
Значения 
Далее выполняется формирование ориентированной КМ ошибок ССН 18. С целью определения информационного веса (N-M) НС, оставшихся после корректировки 16, дополнительно используется функциональное преобразование величины Kант.с, например, вида:

где Dпд - информационный вес НС по ПД, 
После вычисления
При формировании значений диагональных элементов КМ ошибок ССН, соответствующих ошибкам ПС, поступают аналогично. Если параметры системы слежения за несущей (системы ФАПЧ) в спутниковом приемнике оптимизированы при действии шума, то полоса пропускания контура второго порядка определяется из выражения 

где Δfω - полоса пропускания системы ФАПЧ.
С целью определения информационного веса (N-M) НС, оставшихся после корректировки 16, дополнительно используется функциональное преобразование величины Kант.с, аналогичное приведенному ранее (2):

Где: Dпс - информационный вес НС по ПС,
а 2 - масштабный коэффициент (в общем случае отличный от а 1), обеспечивающий плавное выключение спутника из решения навигационной задачи.
После вычисления 
Корректировка навигационных параметров ЛА по ССН 17 выполняется после определения навигационных параметров по ССН 3 и корректировки состава рабочего созвездия 16, причем указанные навигационные параметры включают в себя псевдодальности и псевдоскорости. При этом исключаются навигационные параметры спутников, для которых коэффициент усиления антенны не превышает установленный порог.
Формирование ориентированных навигационных параметров по ССН 23 объединяет два информационных потока: навигационные параметры ЛА по ССН в виде псевдодальностей и псевдоскоростей (вектор размером 2(W-M)), а также точностные характеристики указанных параметров в виде ориентированной КМ ошибок по ССН (матрица размером 2(N-M)×2(N-M)). Дополнительно выполняется отбраковка НС по величине элементов ориентированной КМ. Необходимость этой операции связана с тем, что при малых углах места затруднительно иметь точные данные о коэффициенте усиления антенны из-за влияния отражений от поверхности корпуса ЛА и изменения геометрии ЛА при полете. В процессе эксплуатации корпус ЛА многократно перекрашивается, а состояние поверхности зависит от метеоусловий. При полете форма корпуса и, в частности прогиб крыла, зависит от загрузки, расхода топлива и маневрирования. Поэтому требуется дополнительная отбраковка НС по величине элементов ориентированной КМ.
После определения навигационных параметров по ДСН 7 выполняются следующие операции: формирование векторов направления и определение весовых коэффициентов НРМ 20 и корректировка рабочего состава НРМ 21. Выбор рабочего состава НРМ 11 в способе прототипе [10] выполняется в бортовом вычислителе на основе данных о координатах НРМ, содержащихся в базе данных, и уточненного положения (координат) ЛА. При этом учитываются расстояние ЛА относительно НРМ и геометрический фактор [6]. Ориентация ЛА не учитывается. Формирование ЗДС выполняется на частотно-кодовых каналах только тех НРМ, которые включены в текущий рабочий состав. В предлагаемом способе производится корректировка рабочего состава НРМ 21.
Для этого выполняется формирование векторов направления и определение весовых коэффициентов 20. При формировании векторов направления НРМ 20, с помощью данных о координатах НРМ и уточненного положения ЛА вычисляются угловые координаты (углы места и азимута) рабочих НРМ в НСК. Затем формируются векторы направлений НРМ в ССК с учетом ориентации ЛА (подробнее эти операции будут описаны далее).
При определении весовых коэффициентов 20 используется диаграмма направленности бортовой антенны приемопередатчика дальномерных сигналов, установленной на ЛА (на малых дальностях возможен учет диаграммы направленности антенны ответчика НРМ). Диаграмма направленности антенны обычно задается в координатах азимут-угол места (в ССК). При этом коэффициент усиления антенны приемника ОДС Kант.д в направлении на НРМ сравнивается с порогом 
Для оставшихся в корректируемом рабочем составе НРМ коэффициент усиления антенны определяет информационный вес данного НРМ при решении навигационной задачи. С этой целью после определения навигационных параметров по ДСН 7 выполняется формирование КМ ошибок по ДСН 19. При формировании корреляционной матрицы ошибок по ДСН учитываются шумовые ошибки измерений времени задержки в приемнике ОДС, зависящие от расстояния ЛА относительно НРМ:

где b1 - дисперсия инструментальной погрешности измерения дальности; r - дальность НРМ относительно ЛА; b2 - масштабный коэффициент.
Значения 
Далее выполняется формирование ориентированной КМ ошибок по ДСН 22. С целью определения информационного веса сигнала данного НРМ при решении навигационной задачи дополнительно используется функциональное преобразование коэффициента усиления антенны приемника ОДС Kант.д, например, вида:

где
После вычисления

Формирование ориентированных навигационных параметров по ДСП 24 объединяет два информационных потока: навигационные параметры ЛА по ДСН в виде дальностей (вектор размером L), а также точностные характеристики указанных параметров в виде ориентированной КМ ошибок по ДСН (матрица размером L×L). При этом используются те же соображения, что и при реализации действия 23 и выполняется дополнительная отбраковка НРМ по величине элементов ориентированной КМ.
Для оценивания ошибок положения ЛА по ИСН 9 используется алгоритм фильтрации Калмана. При этом ориентированные навигационные параметры по ССН и ДСН, совместно с результатами вычисления положения ЛА по ИСН, используются в алгоритме оценивания ошибок инерциального способа навигации расширенным фильтром Калмана. Операции формирования комплексных навигационных параметров ЛА по ССН и ДСН 8 объединяют следующие информационные потоки: ориентированные корреляционные матрицы ошибок по ССН и ДСН объединяются в виде одной диагональной матрицы R размером (2(N-М)+L)×(2(N-M)+L), навигационные параметры ЛА по ССН и ДСН объединяются в виде одного вектора Z(i) размером 2(N-М)+L.
Ошибки вычисления положения (координат) ЛА ИСН Х описываются векторным разностным уравнением [1,2]:

где Х - вектор состояния ошибок; U - вектор погрешностей инерциальных датчиков; F - матрица системы дифференциальных уравнений; W - матрица преобразования.
Упомянутый вектор состояния содержит ошибки измерения положения, скорости и угловой ориентации:

где Δх, Δy, Δz - ошибки измерения прямоугольных навигационных координат, причем ось x направлена на Север, ось y - на Восток, ось z - вниз; Δvx, Δvy, Δvz - ошибки измерения скорости; Δα, Δβ, Δγ - ошибки угловой ориентации ИНС.
Матрица системы дифференциальных уравнений F выбирается в зависимости от класса инерциальной навигационной системы. В системах тактического класса при ограниченной точности датчиков угловой скорости не учитывают угловую скорость вращения Земли [1]. Тогда матрицу можно представить в виде:
где µ=(R+h)-1; η=-tgB(R+h)-1; R - радиус Земли для выбранного референц-эллипсоида; h - высота ЛА; В - широта ЛА; а N, а E, а D - составляющие вектора ускорения ЛА в НСК.
Вектор U содержит ошибки датчиков ускорений и угловых скоростей в связанной системе координат:
 .
.
Матрица преобразования равна  .
.
Вектор X(i) дополняется ошибками инерциальных датчиков, а также ошибкой измерения времени t и скоростью ухода часов vt спутникового приемника. В результате образуется новый n-мерный (n=17) вектор состояния Y(i):

Разностное уравнение состояния в дискретном времени i имеет вид:
Y(i+1)=ФY(i)+V(i),
где V(i) - n-мерный вектор дискретного белого шума с известной корреляционной матрицей Qv; 
Наблюдаемая величина содержит вычисляемые спутниковым приемником навигационные параметры: псевдодальности (ПД) и псевдоскорости (ПС) относительно (N-M) НС, а также вычисляемые приемником дальномерной системы дальности (Д) относительно L НРМ и, поэтому, имеет вид:
 ,
,
где ZПД(i) - вектор измерений ПД; ZПС(i) - вектор измерения ПС; ZД(i) - вектор измерений дальности.
Заметим, что вектор Z(i) представляет собой комплексные (ориентированные) навигационные параметры ЛА по ССН и ДСН и имеет размер 2(N-М)+L.
Вектор ПД состоит из (N-М) элементов вида

где xи(i), yи(i) и zи(i) - элементы вектора координат, измеренного инерциальным способом; k - номер спутника k=1…N-M; xk(i), yk(i) и zk(i) - координаты k-го спутника; 
Вектор ПС также содержит N-M элементов вида

где vx(i), vy(i) и vz(i) - элементы вектора скорости, измеренного инерциальным способом; 



Вектор измерений дальности состоит из L элементов вида
 ,
,
где хи(i), yи(i) и zи(i) - элементы вектора координат, измеренного инерциальным способом; j - номер НРМ j=1…L; хj(i), yj(i) и zj(i) - координаты j-го НРМ; 

Оптимальная оценка вектора состояния 
где 



 ;
;
элементы вектора
 ;
;
элементы вектора

K(i) - оптимальный коэффициент усиления.
Величина K(i) определяется выражениями:



где Р(i) и Р-(i) - корреляционные матрицы ошибок фильтрации и экстраполяции вектора состояния объекта; 
Заметим, что матрица R теперь представляет собой комплексную корреляционную матрицу ошибок по ССН и ДСН, учитывающую ориентацию ЛА, и имеет размер (2(N-М)+L)×(2(N-M)+L).
После оценивания ошибок положения ЛА по ИСН выполняется коррекция навигационных параметров по ИСН и определение уточненного положения ЛА 10. При этом из оценок навигационных параметров ЛА, полученных инерциальным способом, вычитаются значения соответствующих оценок ошибок ИСН (ошибки измерения координат и скорости), содержащиеся в оценке вектора состояния 
Ниже рассмотрены варианты, развивающие и уточняющие предложенный способ.
Вариант, соответствующий п. 2 формулы. При вычислении положения ЛА по ИСН 1 (Фиг. 2), предполагается, что используется бесплатформенная инерциальная навигационная система (БИНС). В такой системе блок инерциальных датчиков, установленный на корпусе ЛА, вырабатывает вектор угловых скоростей ωb и вектор ускорений a
b в связанной системе координат (ССК), например: крен-тангаж-рысканье (Roll-Pitch-Yaw) - RPY. Определение координат и вектора скорости ЛА затем выполняется в навигационной системе координат (НСК), например: «North-East-Down» - NED. Для вычисления положения ЛА по ИСН (Фиг. 3) выполняются следующие операции: определение векторов угловой скорости и ускорения в ССК (показания инерциальных датчиков), вычисление оператора ориентации ЛА 25, обеспечивающего преобразование координат. Далее выполняется вычисление положения ЛА по ИСН 33 путем преобразования вектора ускорения из ССК в НСК и вычисления скорости и координат ЛА [2, 9]. В качестве оператора ориентации ЛА можно, например, использовать матрицу направляющих косинусов 
При формировании векторов направления НС в НСК 26 (Фиг. 3) используются угловые координаты НС (углы места и азимута) в НСК. Угол места спутника φ в НСК отсчитывается относительно горизонтальной плоскости, а угол азимута ϕ - относительно направления на Север. Направление на спутник в НСК при этом характеризуется вектором
 .
.
Затем формируются векторы направлений НС в ССК 27 с помощью транспонированной матрицы 
 .
.
При определении весовых коэффициентов спутников 28 (Фиг. 3) используется диаграмма направленности антенны спутникового приемника, установленной на ЛА. Диаграмма направленности антенны обычно задается в координатах азимут-угол места (в ССК). Например, если определен вектор направления Nb=(n1n2n3)T, то угол места спутника в ССК равен -arcsinn3 и азимут arctg(n2/n1). Далее, как описано выше, коэффициент усиления антенны спутникового приемника Кант.с в направлении на с НРМ Nb сравнивается с порогом и выполняется корректировка состава рабочего НРМ 21. После корректировки останется (N-M) спутников. Для оставшихся в корректируемом составе рабочего созвездия спутников определяются весовые коэффициенты 32 (эта операция описана ранее).
При формировании векторов направления НРМ 30 (Фиг. 3), предварительно с помощью данных о координатах НРМ и уточненного положения ЛА вычисляются угловые координаты НРМ 29 (углы места и азимута для рабочих НРМ в НСК). Угол места НРМ φ в НСК отсчитывается относительно горизонта, а угол азимута ϕ - относительно направления на Север. Направление на НРМ в навигационной системе координат при этом характеризуется вектором (формирование векторов направления НРМ в ССК 30)
 .
.
Затем формируются векторы направлений НРМ в ССК 31 с помощью транспонированной матрицы
 .
.
При определении весовых коэффициентов НРМ 32 (Фиг. 3) используется диаграмма направленности бортовой антенны приемопередатчика дальномерных сигналов, установленной на ЛА. Диаграмма направленности антенны обычно задается в координатах азимут-угол места (в ССК). Например, если определен вектор направления Nb=(n1n2n3)T, тогда угол места равен -arcsinn3 и азимут arctg(n2/n1). Далее, как описано выше, коэффициент усиления антенны приемопередатчика дальномерных сигналов Kант.д в направлении на НРМ Nb сравнивается с порогом и выполняется корректировка рабочего состава НРМ 21. После корректировки останется (N-M) НРМ. Для оставшихся в корректируемом рабочем составе НРМ определяются весовые коэффициенты 32 (эта операция описана ранее).
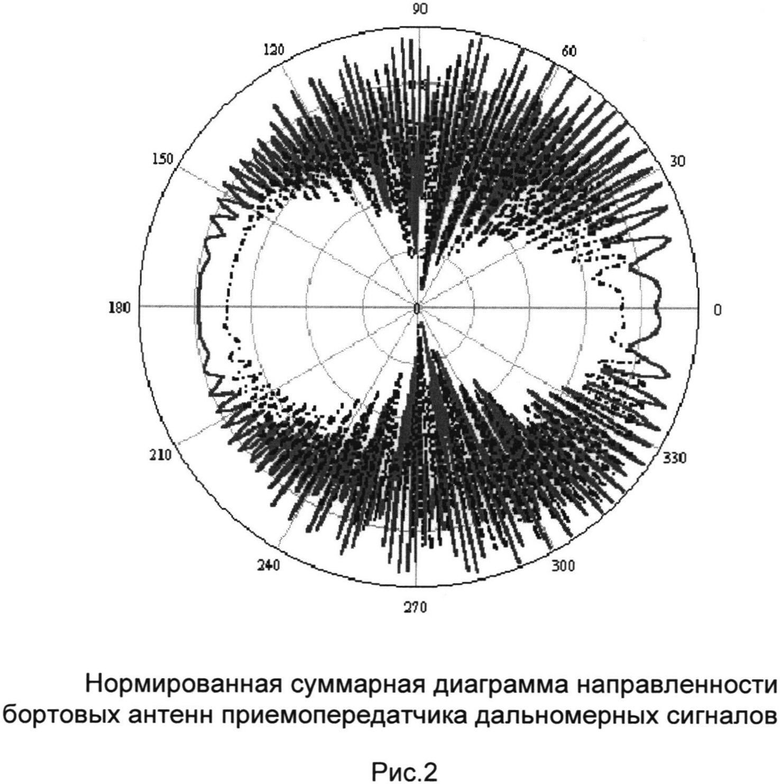
Вариант, соответствующий п. 3 формулы. Поскольку невозможно для ДСН построить всенаправленную антенну, на ЛА устанавливают несколько антенн, например носовую и хвостовую [12]. Диаграммы направленности этих антенн показаны в Приложении 2 на рис 1. Если использовать суммарный выход этих антенн, возникает интерференция в широком секторе углов, и надежная связь обеспечивается только в носовом и хвостовом секторах (Приложения 2 рис. 2). Можно использовать независимые выходы этих антенн и производить поиск сильных сигналов. Но при таком поиске происходит потеря времени и нарушается непрерывность связи с НРМ. Благодаря наличию БИНС можно реализовать оптимальный способ выбора антенны ДСП (Фиг.4), содержащий формирование векторов направления НРМ в ССК 31, определение коэффициентов усиления антенн и векторов, совмещенных с максимумом диаграмм направленности антенн 34, сравнение коэффициентов усиления антенн и выбор наибольшего 35, при наличии которого осуществляется выбор диаграммы направленности антенны 37 с наибольшим коэффициентом усиления 
При выборе диаграммы направленности антенны с наибольшим коэффициентом усиления 

Движению в сторону максимума соответствует уменьшение угла γ и увеличение произведения NbNмакс и, соответственно, положительное значение производной этой величины. Для определения направления вычисляем производную NbNмакс по времени.

Далее используем преобразование 

Полученное выражение зависит от вектора направления НРМ в ССК, вектора угловой скорости вращения ЛА и оператора ориентации. При выборе антенны вычисляется упомянутая производная и осуществляется выбор антенны 37 с положительным значением производной.
Вариант, соответствующий п. 4 формулы. При формировании ориентированной КМ ошибок ССН возможен учет эффектов многолучевого распространения радиосигналов (в дальнейшем - эффектов многолучевости).
Эффекты многолучевости приводят к росту ошибки измерения данных о положении ЛА по ССН. При этом влияние пространственной ориентации ЛА при его маневрировании может оказывать существенное влияние на уровень указанной ошибки. Для выявления таких эффектов требуется иметь диаграмму бистатической эффективной поверхности рассеяния (объемную диаграмму многолучевости [13]) элементов корпуса ВС и данные об угловом положении корпуса относительно направления на спутник. Поэтому предлагается выполнять определение дополнительных весовых коэффициентов НС 38 (Фиг. 5) с учетом оператора ориентации и объемной диаграммы многолучевости, хранящейся в базе данных и характерной для данного типа ЛА. Эта диаграмма содержит значения дисперсии ошибки многолучевости, например псевдодальности 
Далее выполняется корректировка весовых коэффициентов НС 39 (Фиг. 5), например в виде: 

- формирование ориентированных корреляционных матриц ошибок спутникового и дальномерного способов навигации;
- формирование ориентированных навигационных параметров ЛА, определяемых по каждому из упомянутых способов.
При этом существенно:
- при формировании ориентированных навигационных параметров ЛА по ССН производится корректировка навигационных параметров с учетом изменяющегося состава рабочего созвездия НС и ориентированной корреляционной матрицы ошибок ССН;
- при формировании ориентированных навигационных параметров ЛА по ДСН постоянно отслеживается и учитывается изменяющийся рабочий состав НРМ.
Указанные действия определяют существенную новизну предложенного способа. Эффективность предложенного способа подтверждена результатами имитационного цифрового и полунатурного моделирования на комплексных стендах при разработке и отладке программного обеспечения бортовых навигационно-посадочных комплексов перспективных ЛА.
Проведенные летные проверки на самолете Як-42 и вертолете Ми-8 показали техническую целесообразность и эффективность предложенного способа.
Таким образом, заявляемое изобретение является перспективным для решения проблем повышения надежности и точности перспективных систем навигации, в конечном итоге, снижения вероятности авиационных катастроф.
В Приложении 3 приведен перечень принятых в тексте описания сокращений.
Литература
1. Roger R.M. Applied mathematics in integrated navigation systems. AIAA, 2007.
2. D.H. Titterton, J.L. Weston. Strapdown Inertial Navigation Technology. Second Edition, MIT, 2007.
3. Сетевые спутниковые радионавигационные системы / Шебшаевич B.C., Дмитриев П.П., Иванцевич Н.В. и др.; Под ред. B.C. Шебшаевича. - 2-е изд. М.: Радио и связь, 1993. - 408 с.
4. ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Перова, В.Н. Харисова. 4-е изд. М.: Радиотехника. - 800 с.
5. Сосновский А.А. и др. Авиационная радионавигация, справочник. - М.: Транспорт, 1990.
6. Гаврищук В.В. и др. Моделирование и исследование комплексной навигационной системы, содержащей DME, ДВС и датчик курса. Вопросы радиоэлектроники, сер. РЛТ, вып. 2. - М., 2009 стр. 156-165.
7. Патент на полезную модель RU 120077 «Бортовой радиотехнический комплекс навигации и посадки ЛА морского базирования», заявл. 05.05 2012 г., опубл. 10.09 2012 г.
8. Патент ЕРЗ 2533123 Navigation system for an aircraft and method of operating such a navigation system.
9. Заявка РФ №201313555/28 от 29.07.13. Способ инерциально-спутниковой навигации ЛА.
10. Патент US 2010/0106416 «Навигация самолета, использующая GPS, инерциальную систему управления, и дистанционные измерения (DME)», заявл. от 28.10.2008 г., опубл. 29.04.2010 г.
11. Радиоавтоматика: учеб. пособие для студ. высш. учеб. заведений / А.И. Соколов, Ю.С. Юрченко. - М.: Издательский центр «Академия», 2011.
12. Шатраков Ю.Г., Ривкин М.И., Цыбаев Б.Г. Самолетные антенные системы. М. Машиностроение, 1979, стр. 42, 114-117.
13. Бабуров В.И. Формирование объемных диаграмм ошибок многолучевого распространения сигналов в спутниковой системе посадки / Бабуров В.И., Гальперин Т.Б., Саута О.И., Соколов А.И., Юрченко Ю.С. // Вопросы радиоэлектроники, сер. РЛТ, 2010, вып. 2, стр. 169-179.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2536768C1 |
| Способ формирования самоорганизующейся структуры навигационного комплекса | 2016 |
|
RU2635825C1 |
| СПОСОБ ИНЕРЦИАЛЬНО-СПУТНИКОВОГО ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2015 |
|
RU2595328C1 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2510518C1 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2809110C1 |
| Способы коррекции показаний инерциальной части радиоинерциальной системы навигации | 2023 |
|
RU2840478C2 |
| Многопозиционная система посадки летательных аппаратов | 2019 |
|
RU2717284C2 |
| СПОСОБ НАВИГАЦИИ ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ РАДИОТЕХНИЧЕСКОЙ ДАЛЬНОМЕРНОЙ СИСТЕМЫ | 2020 |
|
RU2770311C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ МЕЖСАМОЛЕТНОЙ НАВИГАЦИИ | 2015 |
|
RU2606241C1 |
| Комплексный способ навигации летательных аппаратов | 2016 |
|
RU2646957C1 |

Изобретение относится к области навигации летательных аппаратов (ЛА) с использованием комплексного способа навигации, функционально объединяющего инерциальный способ навигации, спутниковый способ навигации и дальномерный способ навигации. Изобретение может быть использовано при осуществлении навигации высокодинамичных ЛА в сложных навигационных условиях. Новизна способа состоит в том, что формируют дополнительную базу данных, включающую диаграммы направленности антенны спутникового приемника и бортовых антенн приемопередатчика дальномерных сигналов, после приема сигналов навигационных спутников (НС) параллельно с определением навигационных параметров по спутниковому способу навигации (ССН) выделяют состав рабочего созвездия и угловые координаты НС, выделяют отношения сигнал/шум спутникового приемника и формируют корреляционную матрицу ошибок ССН, затем формируют векторы направления НС и определяют весовые коэффициенты НС из состава рабочего созвездия по ориентации ЛА, уточненному положению ЛА, угловым координатам НС и диаграмме направленности антенны спутникового приемника, корректируют состав рабочего созвездия спутников по весовым коэффициентам НС, корректируют навигационные параметры по откорректированному составу рабочего созвездия НС, далее формируют ориентированную корреляционную матрицу ошибок ССН, учитывающую ориентацию ЛА на основе откорректированного состава рабочего созвездия и учета весовых коэффициентов НС, параллельно по дальномерному способу навигации (ДСН) формируют корреляционную матрицу ошибок ДСН, формируют векторы направления и определяют весовые коэффициенты наземных радиомаяков (НРМ) из рабочего состава НРМ по ориентации ЛА, уточненному положению ЛА, координатам НРМ из рабочего состава НРМ и диаграмме направленности упомянутой бортовой антенны приемопередатчика, корректируют рабочий состав НРМ по весовым коэффициентам НРМ, формируют ориентированную корреляционную матрицу ошибок ДСН, учитывающую ориентацию ЛА, на основе откорректированного рабочего состава НРМ и учета весовых коэффициентов НРМ формируют соответственно ориентированные навигационные параметры по ССН и ДСН и используют их в бортовом вычислителе для формирования комплексных навигационных параметров, при этом выходные результаты представляют в виде уточненного положения ЛА, откорректированного с учетом ориентации ЛА. Предлагается вариант способа, использующий для определения данных по ориентации ЛА оператор ориентации, вычисляемый в инерциальном способе навигации. Предлагается также вариант способа, определяющий выбор диаграммы направленности антенны одной из бортовых антенн приемопередатчика дальномерных сигналов. Предлагается также вариант способа, учитывающий зависимость диаграммы многолучевости ЛА от ориентации ЛА и корректирующий определение положения ЛА в зависимости от уровня многолучевости. Результатом использования способа является повышение надежности и точности систем навигации, снижения вероятности авиационных катастроф. 3 з.п. ф-лы, 5 ил., 3 прил.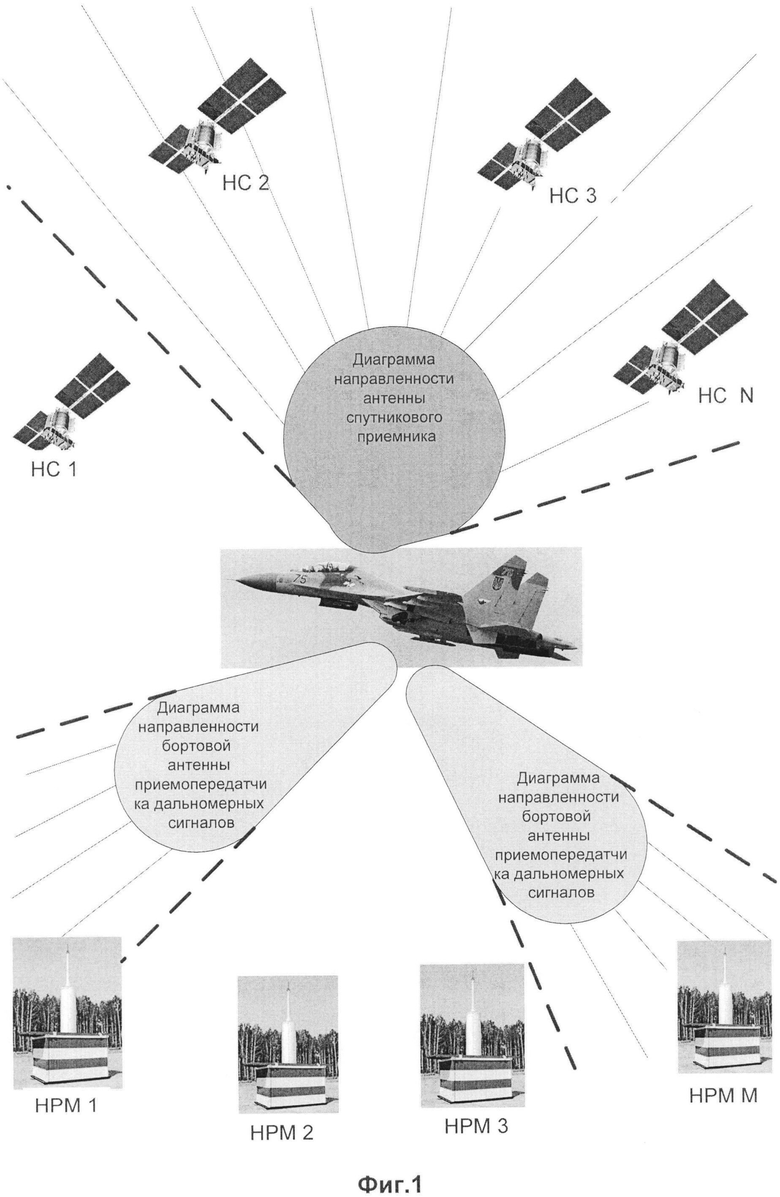
1. Комплексный способ навигации летательных аппаратов (ЛА), предусматривающий для определения положения ЛА использование инерциального, спутникового и дальномерного способов навигации, при этом в инерциальном способе навигации (ИСН) определяют навигационные параметры и положение ЛА по показаниям инерциальных датчиков, в спутниковом способе навигации (ССН) по N навигационным спутникам (НС) производят прием на ЛА сигналов НС, определяют навигационные параметры по ССН с данными о положении ЛА в виде псевдодальностей и псевдоскоростей, а в дальномерном способе навигации (ДСН) производят формирование и излучение запросных дальномерных сигналов на ЛА, прием упомянутых запросных сигналов на наземных радиомаяках (НРМ) с известными координатами, формирование и излучение ответных дальномерных сигналов, прием упомянутых ответных сигналов на ЛА и определяют навигационные параметры в виде дальностей до L НРМ, а далее в бортовом вычислителе формируют комплексные навигационные параметры ЛА из навигационных параметров, определенных по ССН и по ДСН, и формируют комплексную матрицу ошибок ССН и ДСН, с помощью которых оценивают ошибки положения ЛА, определенного по ИСН, и путем коррекции определенного по ИСН положения ЛА определяют уточненное положение ЛА, кроме того, в бортовом вычислителе осуществляют выбор рабочего состава НРМ по уточненному положению ЛА и координатам НРМ из базы данных, сопряженной с бортовым вычислителем, при этом по рабочему составу НРМ проводят соответствующее ему формирование и излучение запросных дальномерных сигналов, а выходные результаты представляют в виде уточненного положения ЛА, отличающийся тем, что формируют дополнительную базу данных, включающую диаграммы направленности антенны спутникового приемника и бортовых антенн приемопередатчика дальномерных сигналов, после приема сигналов НС параллельно с определением навигационных параметров по ССН выделяют состав рабочего созвездия и угловые координаты НС, выделяют отношения сигнал/шум спутникового приемника и формируют корреляционную матрицу ошибок ССН, затем формируют векторы направления НС и определяют весовые коэффициенты НС из состава рабочего созвездия по ориентации ЛА, уточненному положению ЛА, угловым координатам НС и диаграмме направленности антенны спутникового приемника, корректируют состав рабочего созвездия спутников по весовым коэффициентам НС, корректируют навигационные параметры по откорректированному составу рабочего созвездия НС, далее формируют ориентированную корреляционную матрицу ошибок ССН, учитывающую ориентацию ЛА, на основе откорректированного состава рабочего созвездия и учета весовых коэффициентов НС, параллельно по ДСН формируют корреляционную матрицу ошибок ДСН, формируют векторы направления и определяют весовые коэффициенты НРМ из рабочего состава НРМ по ориентации ЛА, уточненному положению ЛА, координатам НРМ из рабочего состава НРМ и диаграмме направленности упомянутой бортовой антенны приемопередатчика, корректируют рабочий состав НРМ по весовым коэффициентам НРМ, формируют ориентированную корреляционную матрицу ошибок ДСН, учитывающую ориентацию ЛА, на основе откорректированного рабочего состава НРМ и учета весовых коэффициентов НРМ, формируют соответственно ориентированные навигационные параметры по ССН и ДСН и используют их в бортовом вычислителе для формирования комплексных навигационных параметров, при этом выходные результаты представляют в виде уточненного положения ЛА, откорректированного с учетом ориентации ЛА.
2. Комплексный способ по п. 1, отличающийся тем, что по показаниям инерциальных датчиков в виде угловых скоростей в связанной системе координат вычисляют в ИСН оператор ориентации, формируют в ССН по угловым координатам НС векторы направления НС в навигационной системе координат, затем, используя оператор ориентации, формируют векторы направления НС в связанной системе координат и, используя диаграмму направленности антенны спутникового приемника, определяют весовые коэффициенты НС, параллельно в ДСН по координатам НРМ из базы данных и уточненному положению ЛА вычисляют угловые координаты НРМ, формируют векторы направления НРМ в навигационной системе координат, затем, используя оператор ориентации, формируют векторы направления НРМ в связанной системе координат и, используя диаграмму направленности бортовой антенны приемопередатчика дальномерных сигналов, определяют весовые коэффициенты НРМ, при этом в ИСН с помощью оператора ориентации вычисляют вектор ускорения ЛА в навигационной системе координат, по которому определяют положение ЛА по ИСН.
3. Способ по пп. 1,2, отличающийся тем, что после формирования векторов направления НРМ определяют коэффициент усиления каждой из бортовых антенн приемопередатчика дальномерных сигналов и выбирают диаграмму направленности антенны с наибольшим коэффициентом усиления, а при близких коэффициентах усиления упомянутых бортовых антенн выбирают диаграмму направленности антенны в соответствии с перемещением вектора направления НРМ.
4. Способ по п. 1, отличающийся тем, что в дополнительную базу данных вводят диаграмму многолучевости ЛА, определяют дополнительные весовые коэффициенты НС из состава рабочего созвездия по ориентации ЛА и упомянутой диаграмме многолучевости, после определения весовых коэффициентов НС проводят корректировку весовых коэффициентов, определяя результирующий весовой коэффициент НС, например, как сумму весового коэффициента и дополнительного весового коэффициента, и вводят при формировании ориентированной корреляционной матрицы ошибок ССН результирующий весовой коэффициент.
| US 20100106416 А1, 29.04.2010 | |||
| АРХИТЕКТУРА И СПОСОБ НАВИГАЦИОННОЙ СИСТЕМЫ GPS ЛЕТАТЕЛЬНОГО АППАРАТА С ДВОЙНЫМ РЕЗЕРВИРОВАНИЕМ И ЗАЩИТОЙ ОТ ПОМЕХ | 2003 |
|
RU2336537C2 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2471152C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2385469C1 |
| УСТРОЙСТВО, СПОСОБСТВУЮЩЕЕ НАЗЕМНОЙ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА В АЭРОПОРТУ | 2006 |
|
RU2368873C1 |

