Изобретение относится к области вторичной цифровой обработки радиолокационных (РЛ) сигналов и может быть использовано для распознавания типового состава групповой воздушной цели (ГВЦ) из класса «самолеты с турбореактивными двигателями (ТРД)».
Известен способ распознавания воздушной цели (ВЦ) из класса «самолет с ТРД», заключающийся в том, что РЛ сигнал, отраженный от ВЦ из класса «самолет с ТРД», подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье (БПФ) и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планера ВЦ и вращающихся лопаток рабочего колеса первой ступени компрессора низкого давления (КНД) ее силовой установки, определяется отсчет доплеровской частоты, соответствующий отражениям РЛ сигнала от планера ВЦ, который поступает на вход оптимального фильтра, функционирующего в соответствии с процедурой оптимальной многомерной линейной дискретной калмановской фильтрацией [1]







где
Р-(k+1) и Р(k+1) - ковариационные матрицы ошибок экстраполяции и фильтрации соответственно, размерности n×n, n - размерность вектора Х(k+1) состояния;
Ф(k) - переходная матрица состояния размерности n×n;
Q(k) и R(k) - ковариационные матрицы шумов возбуждения и наблюдения размерности nxn и mxm соответственно, m - размерность вектора Y(k+1) наблюдения;
 - вектор-столбец шумов наблюдения, представляющие собой гауссовские «белые» последовательности с нулевыми математическими ожиданиями и матрицами спектральных плотностей Nr(k) размерности m;
- вектор-столбец шумов наблюдения, представляющие собой гауссовские «белые» последовательности с нулевыми математическими ожиданиями и матрицами спектральных плотностей Nr(k) размерности m;
Н(k) - матрица наблюдения размерности m×n;
Z(k+1) - матрица невязок измерения размерности m;
K(k+1) - матрица весовых коэффициентов размерности n×m;
I - единичная матрица размерности n×n;
«т» - символ транспонирования;
«-1» - символ нахождения обратной матрицы;
«^» - символ нахождения оценки,
определяется отсчет доплеровской частоты, соответствующий отражениям РЛ сигнала от вращающихся лопаток рабочего колеса первой ступени КНД силовой установки самолета с ТРД, который поступает на вход оптимального фильтра сопровождения первой компрессорной составляющей спектра сигнала, функционирующего в соответствии с процедурой (1)-(7), определяется оценка разности  между оцененными значениями доплеровских частот, обусловленных отражениями РЛ сигнала от планера
между оцененными значениями доплеровских частот, обусловленных отражениями РЛ сигнала от планера  ВЦ и вращающихся лопаток рабочего колеса первой ступени
ВЦ и вращающихся лопаток рабочего колеса первой ступени  КНД силовой установки ВЦ, которая соответствует только одному типу ВЦ из класса «самолет с ТРД», диапазон разностей
КНД силовой установки ВЦ, которая соответствует только одному типу ВЦ из класса «самолет с ТРД», диапазон разностей  априорно разбивается на Q неперекрывающихся поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона (где q=1, …, Q; Q - общее количество возможных типов самолетов с ТРД), соответствующего q-му типу цели, определяются выражениями
априорно разбивается на Q неперекрывающихся поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона (где q=1, …, Q; Q - общее количество возможных типов самолетов с ТРД), соответствующего q-му типу цели, определяются выражениями


где
Fpq - максимальная частота вращения ротора КПД силовой установки q-го типа воздушной цели;
b1 и b2 - соответственно минимальное и максимальное значение величины относительных оборотов вращения ротора силовой установки, одинаковые для всех типов воздушных целей;
Nлi - количество лопаток рабочего колеса первой ступени КПД, за K промежуточных тактов работы обоих оптимальных фильтров вычисляется вероятность Pq попадания величины  в каждый q-й поддиапазон, определяется номер поддиапазона, для которого величина вероятности Pq максимальна, максимальное значение величины Pq max сравнивается с пороговым значением вероятности распознавания типа цели Рпор, при Pq max≥Рпор принимается решение о распознавании q-го типа ВЦ из класса «самолет с ТРД» с вероятностью Pq max, не ниже заданной, в противном случае принимается решение о невозможности распознать тип ВЦ с заданной вероятностью [2].
в каждый q-й поддиапазон, определяется номер поддиапазона, для которого величина вероятности Pq максимальна, максимальное значение величины Pq max сравнивается с пороговым значением вероятности распознавания типа цели Рпор, при Pq max≥Рпор принимается решение о распознавании q-го типа ВЦ из класса «самолет с ТРД» с вероятностью Pq max, не ниже заданной, в противном случае принимается решение о невозможности распознать тип ВЦ с заданной вероятностью [2].
Недостатком данного способа распознавания типа ВЦ является невозможность с его помощью распознать типовой состав ГВЦ из класса «самолеты с ТРД».
Известен способ распознавания типового состав ГВЦ из класса «самолеты с ТРД», заключающийся в том, что РЛ сигнал, отраженный от ГВЦ, на промежуточной частоте подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планеров самолетов группы и вращающихся лопаток первых ступеней рабочих колес КНД их силовых установок, вычисляется отсчет доплеровской частоты центроида, как среднее значение отсчетов доплеровских частот локальных максимумов, соответствующих отражениям РЛ сигналов от планеров самолетов группы, который поступает на вход оптимального фильтра сопровождения центроида ГВЦ, работающего в соответствии с процедурой (1)-(7), определяются отсчеты доплеровских частот первых компрессорных составляющих спектра РЛ сигнала, обусловленных его отражениями от вращающихся лопаток рабочих колес первой ступени КНД двигателя каждого i-го (где i=1, …,I; I - количество самолетов в группе) самолета группы, которые поступают на вход оптимального фильтра сопровождения компрессорных составляющих спектра сигнала, работающего в соответствии с процедурой (1)-(7), на каждом k-том такте работы обоих оптимальных фильтров сопровождения определяются оценки разностей  между оцененными значениями доплеровских частот, соответствующих центроиду ГВЦ
между оцененными значениями доплеровских частот, соответствующих центроиду ГВЦ  и отражениям РЛ сигнала от лопаток рабочего колеса первой ступени
и отражениям РЛ сигнала от лопаток рабочего колеса первой ступени  КНД двигателя каждого i-го самолета группы, которые соответствуют только одному из распознаваемых типу ВЦ из класса «самолет с ТРД», весь диапазон возможных значений оценок разностей
КНД двигателя каждого i-го самолета группы, которые соответствуют только одному из распознаваемых типу ВЦ из класса «самолет с ТРД», весь диапазон возможных значений оценок разностей  априорно разбивается на Q неперекрывающихся друг с другом поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона определяются выражениями (8) и (9), за K промежуточных тактов работы обоих оптимальных фильтров вычисляются вероятности Pqj попадания величин
априорно разбивается на Q неперекрывающихся друг с другом поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона определяются выражениями (8) и (9), за K промежуточных тактов работы обоих оптимальных фильтров вычисляются вероятности Pqj попадания величин  в каждый из априорно сформированный q-й поддиапазон, определяются номера q-х поддиапазонов, для которых величины вероятностей Pqj максимальны, максимальные значения величин Pqj mах сравниваются с пороговым значением вероятности распознавания типа каждого самолета группы Рпор, при Pqj max≥Рпор принимается решение о том, что i-й самолет в группе имеет q-й тип из класса «самолеты с ТРД» с вероятностью Pqj max, не ниже заданной, в противном случае принимается решение о невозможности распознать тип самолета в группе с заданной вероятностью, количество величин разностей
в каждый из априорно сформированный q-й поддиапазон, определяются номера q-х поддиапазонов, для которых величины вероятностей Pqj максимальны, максимальные значения величин Pqj mах сравниваются с пороговым значением вероятности распознавания типа каждого самолета группы Рпор, при Pqj max≥Рпор принимается решение о том, что i-й самолет в группе имеет q-й тип из класса «самолеты с ТРД» с вероятностью Pqj max, не ниже заданной, в противном случае принимается решение о невозможности распознать тип самолета в группе с заданной вероятностью, количество величин разностей  попавших в q-й поддиапазон с вероятностями Pqj max, определяет количество самолетов q-го типа в группе [3].
попавших в q-й поддиапазон с вероятностями Pqj max, определяет количество самолетов q-го типа в группе [3].
Недостатком данного способа распознавания типового состава ГВЦ из класса «самолеты с ТРД» является непостоянство вероятности распознавания типа каждого самолета с ТРД в группе. Это обусловлено тем, что решающее правило при распознавании типового состава ГВЦ, во-первых, является неоптимальным, во-вторых, не адаптируется к условиям полета ГВЦ, поскольку оно основано на априорно фиксированных границах сформированных q-х поддиапазонов, определяемых выражениями (8) и (9), в-третьих, необходимо выполнение условия, когда минимальное и максимальное значение величины относительных оборотов вращения ротора силовой установки (b1 и b2, соответственно в формулах (8) и (9)) должны быть одинаковыми для всех типов самолетов группы.
В действительности же данные априорно сформированные границы каждого q-го поддиапазона в процессе полета ГВЦ могут меняться в зависимости от характера полета самолетов группы, например, с изменением высоты полета или при различных интервалах и дистанциях между самолетами группы при выдерживании заданных параметров боевого порядка в различных его формах («пеленг», «фронт», «клин» и т.д.), когда величины относительных оборотов b1 и b2 (формулы (8) и (9)) вращения ротора силовой установки не будут соответствовать априорно заданным и неравными для всех типов самолетов группы. Поэтому границы q-х поддиапазонов не будут соответствовать априорным их значениям, что в результате приведет к неверному распознаванию типового состава ГВЦ в целом.
Цель изобретения - обеспечить постоянство вероятности распознавания типового состава групповой воздушной цели не ниже заданной за счет оптимизации решающего правила, позволяющего адаптировать процесс распознавания к различному характеру полета групповой воздушной цели.
Для достижения цели в способе распознавания типового состава ГВЦ, заключающемся в том, что РЛ сигнал, отраженный от ГВЦ, на промежуточной частоте подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планеров самолетов группы и вращающихся лопаток первых ступеней рабочих колес КНД их силовых установок, вычислении отсчета доплеровской частоты центроида Fц, как среднее значение отсчетов доплеровских частот локальных максимумов, соответствующих отражениям РЛ от планеров самолетов группы, определяются отсчеты доплеровский частот Fкij (где i=1, …,I; I - количество самолетов в группе; j=1, …,J; J - количество типов самолетов с ТРД в группе) первых компрессорных составляющих спектра сигнала, обусловленных его отражениями от лопаток рабочего колеса первой ступени КНД двигателя каждого i-го самолета группы, имеющего j-й тип, дополнительно вычисляются разносы ΔFij отсчетов доплеровских частот между центроидом Fц ГВЦ и каждым отсчетом Fкij, как

где i=1, …, I; j=1, …, J,
в соответствии с динамической моделью разносов ΔFij доплеровских частот



где
Fцкij и ΔFцкij - соответственно детерминированные и флюктуационные составляющие разносов доплеровских частот для каждого i-го самолета группы, имеющего j-й тип;
 - производные разносов доплеровских частот для каждого i-го самолета группы, имеющего j-й тип;
- производные разносов доплеровских частот для каждого i-го самолета группы, имеющего j-й тип;
αij - величины, обратно пропорциональные временам корреляции разносов доплеровских частот для каждого i-го самолета группы, имеющего j-й тип;
βij - квадраты собственных частот автокорреляционных функций разносов доплеровских частот для каждого i-го самолета группы, имеющего j-й тип;
σij - среднеквадратические отклонения производных разносов доплеровских частот для каждого i-го самолета группы, имеющего j-й тип;
nij - взаимонезависимые формирующие «белые» гауссовские шумы с нулевыми математическими ожиданиями и единичными интенсивностями для каждого i-го самолета группы, имеющего j-й тип, формируются последовательно в дискретном времени разносы доплеровских частот в виде

где
k=1, …,K - текущий такт формирования разносов доплеровских частот;
K - общее количество тактов формирования разносов доплеровских частот;
Т - значение временного дискрета,
по которым в течение K тактов осуществляется предварительное обучение нейронной сети для различных типов целей с различным характером их полета, имеющих соответствующий разнос доплеровских частот ΔFij (k+1), в процессе распознавания типового состава ГВЦ по РЛ сигналу, отраженному от ее элементов, с помощью каждого ij-го калмановского фильтра, функционирующего в соответствии с процедурой фильтрации (1)-(7) с соответствующей динамической моделью (11) при различном характере полета самолетов группы, осуществляется фильтрация отсчетов разносов доплеровских частот, в результате чего на выходе каждого ij-го калмановского фильтра формируются соответствующие оценки  разносов доплеровских частот, которые поступают на соответствующие входы нейронной сети для принятия за K тактов работы калмановских фильтров предварительного решения о наличии в группе i-го самолета j-го типа с соответствующей вероятностью Pij, которая сравнивается с пороговым значением Рпор, при выполнении условия для каждого значения вероятности Pij≥Рпор принимается окончательное решение о том, что в группе находится i-й самолет j-го типа, в противном случае принимается решение об отсутствии данного типа самолета в группе.
разносов доплеровских частот, которые поступают на соответствующие входы нейронной сети для принятия за K тактов работы калмановских фильтров предварительного решения о наличии в группе i-го самолета j-го типа с соответствующей вероятностью Pij, которая сравнивается с пороговым значением Рпор, при выполнении условия для каждого значения вероятности Pij≥Рпор принимается окончательное решение о том, что в группе находится i-й самолет j-го типа, в противном случае принимается решение об отсутствии данного типа самолета в группе.
Известно [4], что нейронная сеть по своим характеристикам эквивалентна оптимальному разомкнутому калмановскому фильтру. Поэтому в данном случае, в отличие от прототипа, решающее правило можно считать оптимальным. Кроме того, поскольку предварительное обучение нейронной сети (решающего правила) осуществляется изменяющимися во времени разносами доплеровских частот (формула (12), формируемых на основе их динамических моделей (11), характерных для каждого типа самолета с ТРД в группе при различном характере его полета, то это позволяет адаптировать оптимальное решающее правило к условиям полета ГВЦ, то есть обеспечить постоянство вероятности распознавания каждого тип самолета с ТРД в группе.
Новыми признаками, обладающими существенными отличиями, являются следующие.
1. Использование оптимального решающего правила в виде нейронной сети, эквивалентной по своим характеристикам оптимальному разомкнутому калмановскому фильтру, при распознавании типового состава ГВЦ,
2. Предварительное обучение нейронной сети для различных типов целей с различным характером их полета, имеющих соответствующий разнос доплеровских частот ΔFij (k+1), определяемый выражением (12) на основе динамической модели (11) разносов доплеровских частот.
3. Распознавание с помощью предварительно обученной нейронной сети типового состава ГВЦ с вероятностью, не ниже заданной, на основе оценок разносов оценки  формируемых на выходе каждого ij-го калмановского фильтра, функционирующего в соответствии с процедурой (1)-(7) с соответствующей динамической моделью (11).
формируемых на выходе каждого ij-го калмановского фильтра, функционирующего в соответствии с процедурой (1)-(7) с соответствующей динамической моделью (11).
Данные признаки обладают существенными отличиями, так как в известных способах не обнаружены.
Применение всех новых признаков в совокупности с известными позволит обеспечить постоянство вероятности распознавания типового состава ГВЦ с вероятностью, не ниже заданной.
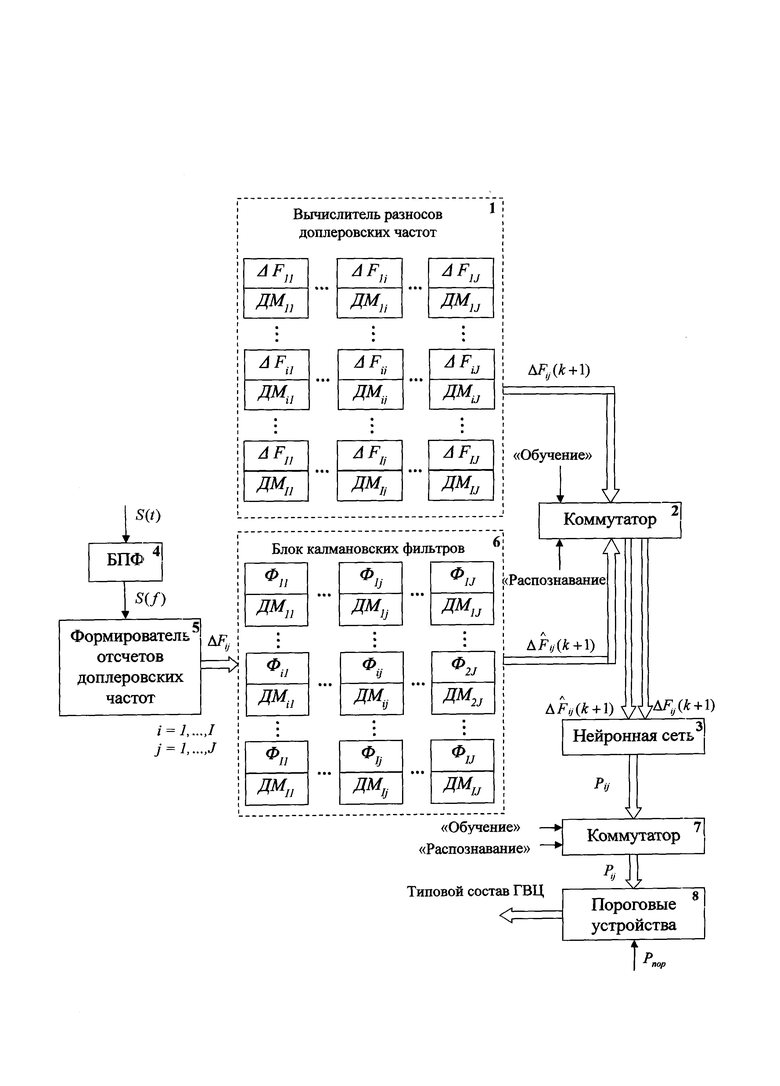
На рисунке приведена блок-схема, поясняющая предлагаемый способ распознавания типового состава ГВЦ из класса «самолеты с ТРД» на основе калмановской фильтрации и нейронной сети.
Предлагаемый способ распознавания типового состава ГВЦ из класса «самолеты с ТРД» осуществляется следующим образом (рисунок: 1 - вычислитель разносов доплеровских частот; 2, 7 - коммутаторы; 3 - нейронная сеть; 4 - блок БПФ; 5 - формирователь отсчетов доплеровских частот; 6 - блок калмановских фильтров; 8 - пороговые устройства).
В вычислителе 1 разносов доплеровских частот в соответствии с динамическими моделями (ДМij, i=1, …, I; j=1, …, J) в виде системы дифференциальных уравнений (11) вычисляются последовательно в дискретном времени разносы доплеровских частот для различных типов самолетов с ТРД с различным характером их полета, определяемые формулой (12), которые через первый коммутатор 2 по команде «Обучение» поступают на соответствующие ij-е входы нейронной сети 3 для ее предварительного обучения за K тактов формирования разносов доплеровских частот.
При распознавании типового состава ГВЦ на вход блока 4 БПФ на промежуточной частоте поступает РЛ сигнал S(t), отраженный от ГВЦ из класса «самолеты с ТРД», который подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в амплитудно-частотный спектр S(f), составляющие которого обусловлены отражениями сигнала от планеров самолетов группы и вращающихся лопаток рабочего колеса КНД их силовых установок.
В формирователе 5 разносов отсчетов доплеровских частот, во-первых, вычисляется отсчет доплеровской частоты центроида Fц, как среднее значение отсчетов доплеровских частот планерных составляющих спектра РЛ сигнала, отраженного от планеров самолетов группы, во-вторых, определяются отсчеты доплеровских частот Fкij (где i=1, …,I; I - количество самолетов в группе; j=1, …,J; J - количество типов самолетов с ТРД в группе) первых компрессорных составляющих спектра сигнала, обусловленных его отражениями от лопаток рабочего колеса первой ступени КНД двигателя каждого i-го самолета группы, имеющего j-й тип, в-третьих, вычисляются разносы ΔFij отсчетов доплеровских частот между центроидом Fц ГВЦ и каждым отсчетом Fкij в соответствии с формулой (10).
С помощью каждого Фij-го калмановского фильтра, функционирующего в соответствии с процедурой фильтрации (1)-(7) с соответствующей динамической моделью (11), в блоке 6 калмановских фильтров, осуществляется фильтрация сформированных в блоке 5 отсчетов разносов доплеровских частот (формула (10)), в результате чего на выходе каждого Фij-го калмановского фильтра формируются соответствующие оценки  разносов доплеровских частот, которые поступают на соответствующие ij-е входы нейронной сети 3.
разносов доплеровских частот, которые поступают на соответствующие ij-е входы нейронной сети 3.
За K тактов работы калмановских фильтров соответствующие вероятности Pij предварительного распознавания типа каждого самолета группы с каждого ij-го выхода нейронной сети 3 через второй коммутатор 7 по команде «Распознавание» поступают на соответствующие входы ij-х пороговых устройств блока 8 (по команде «Обучение», подаваемой на вход коммутатора 7, с выхода нейронной сети 3 значения разносов доплеровских частот, определяемые формулой (12), на входы пороговых устройств блока 8 не поступают), а на их вторые входы поступает единое для всех пороговых устройств значение пороговой вероятности распознавания Рпор типа каждого самолета группы.
В каждом ij-м пороговом устройстве блока 8 соответствующие значения вероятностей Pij сравниваются с пороговым значением Рпор, при выполнении условия для каждого значения Pij≥Рпор принимается окончательное решение о том, что в группе находится i-й самолет j-го типа, в противном случае принимается решение об отсутствии данного типа самолета в группе.
Для оценки работоспособности предлагаемого способа было проведено его имитационное моделирование по РЛ, отраженным от реальной разнотипной (типы 1, 2, 3 и 4) группы из 4 самолетов с ТРД, которые (сигналы) были зарегистрированы на промежуточной частоте с выхода линейной части приемника РЛС с фазированной антенной решеткой, функционирующей по импульсно-доплеровскому принципу обработки сигналов и работающей в сантиметровом диапазоне волн, в процессе проведения летно-экспериментальные исследований. Регистрация РЛ сигналов осуществлялась на удалении 80-100 км в переднюю полусферу под ракурсом 0-40 градусов.
При узкополосном спектральном анализе зарегистрированных реальных РЛ сигналов применялся алгоритм БПФ с эквивалентной полосой пропускания одного бина, равной 10 Гц (время когерентного накопления сигнала составляло 100 мс).
В калмановской процедуре фильтрации (1)-(7) для каждого Фij-го калмановского фильтра (в дальнейшем индексы i и j в обозначении матриц для сокращения записей будут опущены) элементы матриц имели следующие значения.
В матрице Ф(k), размерности 3×3 (в соответствии с динамической моделью (11)), отличные от нуля элементы имели следующие значения
ϕ11=ϕ22=1; ϕ23=Т; ϕ31=-βijT; ϕ33=1-αijT.
Ненулевым элементом ковариационной матрицы Q(k) шумов возбуждения, размерности 3×3, являлся 
Ненулевыми элементами матрицы наблюдения Н(k), имеющей размерность 1×3, являлись h11=h12=1.
Вектор состояния X(t) имел следующий вид (согласно динамической модели (11))

Разносы доплеровских частот в блоке 1, (формула (12)) определялись из выражения

Вектор наблюдения имел вид

где

Элемент вектора невязок измерения имел вид

Элементы вектора оценок имели вид



Результирующая оценка разносов доплеровских частот определялась из вышеприведенных частных оценок, как

Архитектура нейронной сети 3 представляла из себя многослойную нейронную сеть прямого распространения, состоящей из трех слоев.
Первый слой нейронов - это входной слой сети, на ij-е входы которой последовательно подавались оценки  разносов доплеровских частот с выхода соответствующего Фij-го калмановского фильтра блока 6.
разносов доплеровских частот с выхода соответствующего Фij-го калмановского фильтра блока 6.
Второй (скрытый) слой нейронной сети - это слой с нелинейной функцией активации.
Третий слой - это выходной слой сети, на ij-х выходах которой формируются оценки Pij вероятностей предварительного распознавания i-го самолета в группе, имеющего j-й тип.
Обучение нейронной сети 3 осуществлялось при условии, что общее количество самолетов с ТРД в группе равно 4 и возможно нахождение в группе 8 типов самолетов (тип 1-тип 8, от данных типов самолетов также были зарегистрированы и обработаны реальные РЛ сигналы), то есть I=4, J=8.
Пороговое значение вероятности принималось равным Рпор=0,9.
Величина дискрета - Т=0,1 с.
В результате имитационного моделирования за 14-15 тактов (K=14-15, то есть за время 1,4-1,5 с) работы калмановских фильтров были получены следующие результаты (с доверительной вероятностью 0,95), приведенные в таблице.
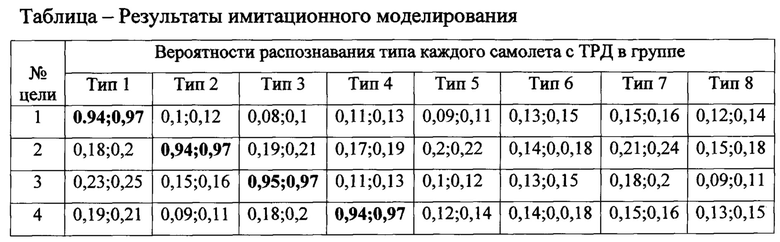
Из анализа полученных результатов имитационного моделирования следует, что с вероятностью 0,94-0,97 (превосходит пороговое значение Рпор=0,9) в группе находятся самолеты с ТРД типа 1, 2, 3 и 4, что соответствует действительности (именно оценки реальных разносов отсчетов доплеровских частот для этих типов самолетов подавались на ij-е входы нейронной сети 3).
Во всех случаях вероятности ложного распознавания типов 1, 2, 3 и 4 составили порядка 0,022-0,03.
Таким образом, предлагаемое изобретение позволит обеспечить постоянство вероятности распознавания типового состава ГВЦ не ниже заданной.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Казаринов, Ю.М. Проектирование устройств фильтрации радиосигналов / Ю.М. Казаринов, А.И. Соколов, Ю.С. Юрченко Ю.С. // - Л.: изд. Ленинградского университета. - 1985. - стр. 150-151.
2. Пат. 2419815, Российская Федерация, МПК G01S 13/52 (2006.01). Способ сопровождения воздушной цели из класса «самолет с турбореактивным двигателем» [Текст] / Богданов А.В., Васильев О.В., Исаков И.Н., Ситников А.Г., Филонов А.А.; заявитель и патентообладатель ОАО "ГСКБ "АЛМАЗ-АНТЕЙ" им. АКАДЕМИКА А.А. РАСПЛЕТИНА (RU). - №2009140853/09; заявл. 03.11.2009; опубл. 27.05.2011, Бюл. №15. - 12 с.: ил. (аналог).
3. Пат. 2456633, Российская Федерация, МПК G01S 13/52 (2006.01). Способ сопровождения групповой воздушной цели из класса «самолеты с турбореактивными двигателями» [Текст] / Ситников А.Г., Богданов А.В., Васильев О.В., Ибрагим А.К., Филонов А.А., Круталевич Ю.А.; заявитель и патентообладатель Федеральное государственное научное учреждение "Государственный научно-технологический центр "Наука" (ФГНУ "ГНТЦ "Наука") (RU). - №2011117802/07; заявл. 03.05.2011; опубл. 20.07.2012, Бюл. №20. - 14 с.: ил. (прототип).
4. Ефименко, B.C. Применение нейронных сетей в задачах оптимальной фильтрации / B.C. Ефименко, В.Н. Харисов, Е.Г. Огребков // Радиотехника, 2000. - №7.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ всеракурсного распознавания типового состава групповой воздушной цели из класса "самолеты с турбореактивными двигателями" на основе калмановской фильтрации и нейронных сетей | 2024 |
|
RU2835772C1 |
| Способ распознавания типового состава групповой воздушной цели различных классов при различных условиях ее полета на основе калмановской фильтрации и нейронной сети | 2022 |
|
RU2802653C1 |
| Способ всеракурсного распознавания в радиолокационной станции типового состава групповой воздушной цели при различных условиях полета и воздействии уводящих по скорости помех на основе калмановской фильтрации и нейронной сети | 2023 |
|
RU2816189C1 |
| Способ многопризнакого распознавания в многофункциональной радиолокационной станции класса летательного аппарата по принципу "самолет с турбореактивным двигателем - самолет с турбовинтовым двигателем - вертолет - ракета - беспилотный летательный аппарат" на основе совместного применения калмановской фильтрации и нейронной сети | 2024 |
|
RU2832712C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ГРУППОВОЙ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТЫ С ТУРБОРЕАКТИВНЫМИ ДВИГАТЕЛЯМИ" | 2011 |
|
RU2456633C1 |
| Способ сопровождения воздушной цели при воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM | 2020 |
|
RU2727963C1 |
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции при воздействии имитирующих помех | 2020 |
|
RU2735314C1 |
| Способ распознавания типа воздушной цели из класса "Самолет с турбореактивным двигателем" на основе нейронной сети | 2023 |
|
RU2826233C1 |
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции при воздействии уводящей по скорости помехи | 2019 |
|
RU2732281C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЁТ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ" ПРИ ВОЗДЕЙСТВИИ УВОДЯЩЕЙ ПО СКОРОСТИ ПОМЕХИ | 2015 |
|
RU2579353C1 |
Изобретение относится к области вторичной цифровой обработки радиолокационных (РЛ) сигналов и может быть использовано для распознавания типового состава групповой воздушной цели (ГВЦ) из класса «самолеты с турбореактивными двигателями (ТРД)». Технический результат заключается в обеспечении постоянства вероятности распознавания типового состава ГВЦ не ниже заданной за счет оптимизации решающего правила, позволяющего адаптировать процесс распознавания к различному характеру полета ГВЦ. Заявленный способ заключается в том, что РЛ сигнал, отраженный от ГВЦ из класса «самолеты с ТРД», на промежуточной частоте подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планеров самолетов группы и вращающихся лопаток первых ступеней рабочих колес компрессоров низкого давления их силовых установок. Далее вычисляют отсчет доплеровской частоты центроида Fц как среднее значение отсчетов доплеровских частот локальных максимумов, соответствующих отражениям РЛ сигналов от планеров самолетов группы, определяют отсчеты доплеровский частот Fкij первых компрессорных составляющих спектра сигнала, где i=1, …,I; I - количество самолетов в группе; j=1, …,J; J - количество типов самолетов с ТРД в группе. Вычисляют разносы ΔFij отсчетов доплеровских частот между центроидом Fц ГВЦ и каждым отсчетом Fкij в соответствии с динамической моделью разносов ΔFij доплеровских частот, по которым в течение K тактов осуществляется предварительное обучение нейронной сети для различных типов целей с различным характером их полета, имеющих соответствующий разнос доплеровских частот ΔFij (k+1). В процессе распознавания типового состава ГВЦ по РЛ сигналу, отраженному от ее элементов, с помощью каждого ij-го калмановского фильтра, функционирующего с соответствующей динамической моделью при различном характере полета самолетов группы, осуществляют фильтрацию отсчетов разносов доплеровских частот, в результате чего на выходе каждого ij-го калмановского фильтра формируют оценки  разносов доплеровских частот, которые поступают на входы нейронной сети для принятия за K тактов работы калмановских фильтров предварительного решения о наличии в группе i-го самолета j-го типа с соответствующей вероятностью Pij, которая сравнивается с пороговым значением Рпор, при выполнении условия для каждого значения вероятности Pij≥Рпор принимается окончательное решение о том, что в группе находится i-й самолет j-го типа, в противном случае принимается решение об отсутствии данного типа самолета в группе. 1 ил., 1 табл.
разносов доплеровских частот, которые поступают на входы нейронной сети для принятия за K тактов работы калмановских фильтров предварительного решения о наличии в группе i-го самолета j-го типа с соответствующей вероятностью Pij, которая сравнивается с пороговым значением Рпор, при выполнении условия для каждого значения вероятности Pij≥Рпор принимается окончательное решение о том, что в группе находится i-й самолет j-го типа, в противном случае принимается решение об отсутствии данного типа самолета в группе. 1 ил., 1 табл.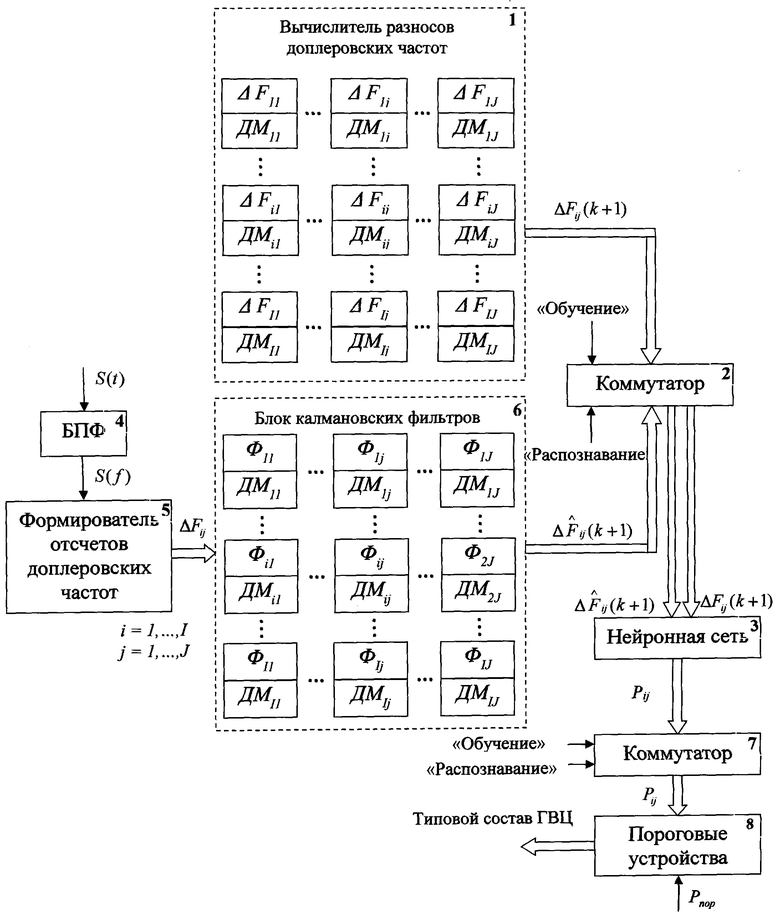
Способ распознавания типового состава групповой воздушной цели из класса «самолеты с турбореактивными двигателями» на основе калмановской фильтрации и нейронной сети, заключающийся в том, что радиолокационный сигнал, отраженный от групповой воздушной цели из класса «самолеты с турбореактивными двигателями», на промежуточной частоте подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планеров самолетов группы и вращающихся лопаток первых ступеней рабочих колес компрессоров низкого давления их силовых установок, в вычислении отсчета доплеровской частоты центроида Fц как среднего значения отсчетов доплеровских частот локальных максимумов, соответствующих отражениям радиолокационных сигналов от планеров самолетов группы, определяются отсчеты доплеровский частот Fкij, где i=1,…,I; I - количество самолетов в группе; j=1,…,J; J - количество типов самолетов с турбореактивным двигателем в группе, первых компрессорных составляющих спектра сигнала, обусловленных его отражениями от вращающихся лопаток рабочего колеса первой ступени компрессора низкого давления двигателя каждого i-го самолета группы, имеющего j-й тип, вычислении процедуры оптимальной многомерной линейной дискретной калмановской фильтрации отсчетов доплеровских частот, описываемой выражениями

где
Р-(k+1) и Р(k+1) - ковариационные матрицы ошибок экстраполяции и фильтрации соответственно, размерности n×n, n - размерность вектора Х(k+1) состояния;
Ф(k) - переходная матрица состояния размерности n×n;
Q(k) и R(k) - ковариационные матрицы шумов возбуждения и наблюдения размерности n×n и m×m соответственно, m - размерность вектора Y(k+1) наблюдения;
 - вектор-столбец шумов наблюдения, представляющие собой гауссовские «белые» последовательности с нулевыми математическими ожиданиями и матрицами спектральных плотностей
- вектор-столбец шумов наблюдения, представляющие собой гауссовские «белые» последовательности с нулевыми математическими ожиданиями и матрицами спектральных плотностей  размерности m;
размерности m;
Н(k) - матрица наблюдения размерности m×n;
Z(k+1) - матрица невязок измерения размерности m;
K(k+1) - матрица весовых коэффициентов размерности n×m;
I - единичная матрица размерности n×n;
«т» - символ транспонирования;
«-1» символ нахождения обратной матрицы;
«^» - символ нахождения оценки,
отличающийся тем, что вычисляются разносы ΔFij отсчетов доплеровских частот между центроидом Fц групповой воздушной цели и каждым отсчетом Fкij, как

где i=1,…,I; j=1,…,J,
в соответствии с динамической моделью разносов ΔFij доплеровских частот
где
Fцкij и ΔFцкij - соответственно детерминированные и флюктуационные составляющие разносов доплеровских частот для каждого i-го самолета группы, имеющего j-й тип;
 - производные разносов доплеровских частот для каждого i-го самолета группы, имеющего j-й тип;
- производные разносов доплеровских частот для каждого i-го самолета группы, имеющего j-й тип;
αij - величины, обратно пропорциональные временам корреляции разносов доплеровских частот для каждого i-го самолета группы, имеющего j-й тип;
βij - квадраты собственных частот автокорреляционных функций разносов доплеровских частот для каждого i-го самолета группы, имеющего j-й тип;
σij - среднеквадратические отклонения производных разносов доплеровских частот для каждого i-го самолета группы, имеющего j-й тип;
nij - взаимонезависимые формирующие «белые» гауссовские шумы с нулевыми математическими ожиданиями и единичными интенсивностями для каждого i-го самолета группы, имеющего j-й тип,
формируются последовательно в дискретном времени разносы доплеровских частот в виде

где
k=1,…,K - текущий такт формирования разносов доплеровских частот;
K - общее количество тактов формирования разносов доплеровских частот;
Т - значение временного дискрета,
по которым в течение K тактов осуществляют предварительное обучение нейронной сети для различных типов целей с различным характером их полета, имеющих соответствующий разнос доплеровских частот ΔFij (k+1), при котором на соответствующие ij-е входы нейронной сети по команде «Обучение» через первый коммутатор подают вычисленные разносы доплеровских частот для различных типов самолетов с турбореактивным двигателем с различным характером их полета, от которых заранее были получены и обработаны реальные радиолокационные сигналы, с формированием в результате обучения оценок разносов доплеровских частот для различных типовых составов групповой воздушной цели, при этом архитектура нейронной сети представляет собой многослойную нейронную сеть прямого распространения, состоящую из трех слоев: первого входного слоя нейронной сети, на ij-е входы которой последовательно подают оценки  разносов доплеровских частот с выхода соответствующего Фij-го калмановского фильтра, второго скрытого слоя нейронной сети в виде слоя с нелинейной функцией активации, и третьего выходного слоя сети, на ij-х выходах которого формируются оценки Pij вероятностей предварительного распознавания i-го самолета с турбореактивным двигателем в группе, имеющего j-й тип, в процессе распознавания типового состава групповой воздушной цели по радиолокационному сигналу, отраженному от ее элементов, с помощью каждого ij-го калмановского фильтра, функционирующего в соответствии с процедурой фильтрации (1)-(7) с соответствующей динамической моделью (9) при различном характере полета самолетов группы, осуществляется фильтрация отсчетов разносов доплеровских частот, в результате чего на выходе каждого ij-го калмановского фильтра формируются соответствующие оценки
разносов доплеровских частот с выхода соответствующего Фij-го калмановского фильтра, второго скрытого слоя нейронной сети в виде слоя с нелинейной функцией активации, и третьего выходного слоя сети, на ij-х выходах которого формируются оценки Pij вероятностей предварительного распознавания i-го самолета с турбореактивным двигателем в группе, имеющего j-й тип, в процессе распознавания типового состава групповой воздушной цели по радиолокационному сигналу, отраженному от ее элементов, с помощью каждого ij-го калмановского фильтра, функционирующего в соответствии с процедурой фильтрации (1)-(7) с соответствующей динамической моделью (9) при различном характере полета самолетов группы, осуществляется фильтрация отсчетов разносов доплеровских частот, в результате чего на выходе каждого ij-го калмановского фильтра формируются соответствующие оценки  разносов доплеровских частот, которые поступают на соответствующие входы нейронной сети для принятия за K тактов работы калмановских фильтров предварительного решения о наличии в группе i-го самолета j-го типа с соответствующей вероятностью Рij, которая сравнивается с пороговым значением Рпор, при выполнении условия для каждого значения вероятности Рij≥Рпор принимается окончательное решение о том, что в группе находится i-й самолет j-го типа, в противном случае принимается решение об отсутствии данного типа самолета в группе.
разносов доплеровских частот, которые поступают на соответствующие входы нейронной сети для принятия за K тактов работы калмановских фильтров предварительного решения о наличии в группе i-го самолета j-го типа с соответствующей вероятностью Рij, которая сравнивается с пороговым значением Рпор, при выполнении условия для каждого значения вероятности Рij≥Рпор принимается окончательное решение о том, что в группе находится i-й самолет j-го типа, в противном случае принимается решение об отсутствии данного типа самолета в группе.
| Способ сопровождения в радиолокационной станции групповой воздушной цели из класса "самолёты с турбореактивными двигателями" при воздействии уводящих по скорости помех | 2016 |
|
RU2617110C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ГРУППОВОЙ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТЫ С ТУРБОРЕАКТИВНЫМИ ДВИГАТЕЛЯМИ" | 2011 |
|
RU2456633C1 |
| Способ факельно-слоевого сжигания кускового топлива в топках паровых котлов | 1949 |
|
SU91185A1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ" | 2009 |
|
RU2419815C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ГРУППОВОЙ ВОЗДУШНОЙ ЦЕЛИ | 2006 |
|
RU2324952C1 |
| CN 113808174 A, 17.12.2021 | |||
| CN 106970370 A, 21.07.2017 | |||
| CN 112613532 A, 06.04.2021 | |||
| DE 102010029637 A1, 08.12.2011. | |||

