Изобретение относится к области измерительной техники и предназначается для измерения скорости прямолинейного движения натурного или модельного объекта внутри заполненного водой бассейна переменных давлений (специализированного гидродинамического стенда), что необходимо осуществлять при аттестации методик измерений, аттестации бассейнов переменных давлений в качестве испытательного оборудования и при гидродинамических испытаниях в них объектов, опытной отработке пусковых устройств необитаемых малогабаритных подводных аппаратов в условиях производственных помещений. Во всех упомянутых случаях актуально требование высокой точности измерений в сочетании с надежностью, простотой реализации способа и эксплуатации устройства для его осуществления.
Известен способ измерения скорости движения объекта относительно равномерно распределенных вдоль пути движения датчиков, последовательно возмущаемых при движении объекта, включающий измерение интенсивности возмущения объектом каждого и следующего за ним датчика в интервале между ними, подключение очередного следующего датчика при равенстве величин сигналов двух смежных датчиков и определение значения скорости по изменению величины сигнала, ближнего к объекту датчика (Авторское свидетельство СССР №1068818, МПК G01P 3/64, опубл. 23.01.1984). При этом расстояние между датчиками должно быть не больше допустимого, обусловленного возможностью линейного преобразования интенсивности в путь при известных дискретных промежутках времени.
Однако этот способ применительно к измерению скорости движения объекта, перемещающегося за секунды на несколько метров внутри бассейна переменных давлений, обеспечивает высокую точность лишь при использовании нескольких десятков измеряющих интенсивность возмущения объектом сертифицированных специальных - выдерживающих высокое давление - датчиков, которым в бассейне переменных давлений необходима герметизация вместе с кабельными связями их с измерительно-регистрирующей аппаратурой и периодическая метрологическая поверка с предшествующим ей демонтажем, что усложняет эксплуатацию устройства для его осуществления.
Известен способ измерения скорости движения подводного объекта, реализованный в гидродинамическом стенде (Патент РФ №2449254, МПК G01M 10/00, опубл. 27.04.2012), по которому размещают штангу вдоль пути следования объекта, монтируют на ней герконы, прокладывают кабельные связи герконов с измерительно-регистрирующей аппаратурой внутри упомянутой пустотелой штанги, герметизируют места ввода в штангу и вывода из нее кабельных связей герконов с измерительно-регистрирующей аппаратурой, помещают на движущийся поступательно объект кольцевую магнитную метку, которая активирует не требующие метрологических поверок герконы, регистрируют электрические сигналы с герконов в виде импульсов во временном ряду, определяют время прохождения подводным объектом известных расстояний между герконами, вычисляют среднюю скорость объекта.
Однако данный способ применительно к измерению скорости движения объекта внутри бассейна переменных давлений с верхней границей 600 кПа обеспечивает высокую точность лишь при использовании нескольких сотен выдерживающих указанное выше высокое давление герконов (по ГОСТ 19150-84 рабочее давление на герконы не превышает 294 кПа), специальной герметизации в целях защиты от действия указанного выше высокого давления такого же количества мест ввода в пустотелую штангу кабельных связей герконов с измерительно-регистрирующей аппаратурой, периодического контроля герметичности герконов и мест герметизации, что усложняет эксплуатацию устройства для его осуществления.
Известен способ измерения скорости движения подводного объекта, принятый за прототип, использующийся в гидродинамической установке для модельных испытаний подводных снарядов (Патент РФ №2203469, МПК F41F 3/10, опубл. 27.04.2003), по которому объект, двигаясь прямолинейно, тянет за собой трос, один конец которого закрепляют на корме объекта, поступательное движение троса преобразуют с помощью технических средств в электрический сигнал, который регистрируют техническими средствами в виде временного ряда, пройденный объектом путь (приращение перемещения объекта) делят на затраченное время (приращение времени).
Такой способ применительно к измерению скорости движения объекта внутри бассейна переменных давлений не в состоянии обеспечить высокую точность измерений, кроме того, технические средства, с помощью которых поступательное движение троса преобразуют в электрический сигнал, необходимо размещать внутри бассейна переменных давлений, что усложняет реализацию и эксплуатацию способа.
Техническим результатом изобретения является высокая гарантированная точность измерения скорости движения подводного объекта без потерь в надежности, простоте реализации способа и эксплуатации устройства для его осуществления.
Технический результат достигается тем, что в способе измерения скорости движения подводного объекта, по которому объект, двигаясь прямолинейно, тянет за собой трос, один конец которого закрепляют на корме объекта, поступательное движение троса преобразуют с помощью технических средств в электрический сигнал, который регистрируют техническими средствами в виде временного ряда, пройденный объектом путь (приращение перемещения объекта) делят на затраченное время (приращение времени), трос пропускают через полиспаст, уменьшающий в несколько раз перемещение, уменьшенное перемещение посредством стержня герметичным образом передают из бассейна переменных давлений наружу размещенному вне бассейна переменных давлений потенциометрическому датчику, тем самым обеспечивают изменение на выходе последнего величины электрического сигнала, который с частотой дискретизации, отвечающей требуемой точности измерения скорости движения подводного объекта, оцифровывают и регистрируют, пользуясь градуировочной характеристикой потенциометрического датчика, определяют перемещения стержня, пользуясь известной частотой дискретизации, с которой образован временной ряд, определяют значения времени, отвечающие перемещениям стержня, заполняют значениями времени ячейки одномерной таблицы значений времени, определяют значения перемещений объекта посредством умножения перемещений стержня на кратность полиспаста, заполняют значениями перемещений объекта ячейки одномерной таблицы значений перемещений объекта, находят в одномерной таблице значений перемещений объекта номер p ячейки, в которой значение перемещения объекта превышает длину участка разгона объекта, но находится ближе к ней, чем значения перемещений в остальных ячейках таблицы, находят в одномерной таблице значений перемещений объекта номер q ячейки, в которой значение перемещения объекта не превышает суммы длин участка, на котором объект двигался с постоянной скоростью, и участка разгона объекта, но находится ближе к этой сумме, чем значения перемещений в остальных ячейках таблицы, переписывают в ячейки первого столбца, содержащей два столбца двумерной таблицы перемещений объекта, последовательно, начиная с имеющей номер p ячейки, от одной трети до половины всех значений перемещений объекта, которые размещены в ячейках с номерами от p до q, переписывают в ячейки второго столбца двумерной таблицы перемещений объекта от одной трети до половины всех значений перемещений объекта, которые размещены в ячейках с номерами от p до q, завершая последовательное заполнение второго столбца двумерной таблицы значением перемещения объекта, который размещен в ячейке с номером q, переписывают значения времени из ячеек одномерной таблицы значений времени в содержащую два столбца двумерную таблицу времени таким образом, чтобы получить взаимно однозначное соответствие с двумерной таблицей перемещений объекта, пользуясь содержимым ячеек двумерной таблицы перемещений объекта, используя один из вариантов схемы, которая учитывает требуемую точность измерения скорости движения объекта, формируют одномерную таблицу приращений перемещений, идентичным образом, пользуясь содержимым ячеек двумерной таблицы времени, формируют одномерную таблицу приращений времени, путем деления содержимого имеющих одинаковые номера ячеек таблицы приращений перемещений на содержимое ячеек таблицы приращений времени, определяют локальные скорости движения объекта, осредняя локальные скорости, определяют среднюю скорость объекта после прохождения им участка разгона.
Осуществление способа предлагаемым образом, т.е. применение полиспаста совместно с потенциометрическим датчиком для измерения перемещения подводного объекта, использование частоты дискретизации, отвечающей требуемой точности измерения скорости движения подводного объекта, для оцифровки и регистрации электрического сигнала от потенциометрического датчика, использование одного из вариантов схемы, учитывающей требуемую точность измерения скорости объекта, для формирования одномерных таблиц приращений перемещений и приращений времени, неизвестно в измерительной технике.
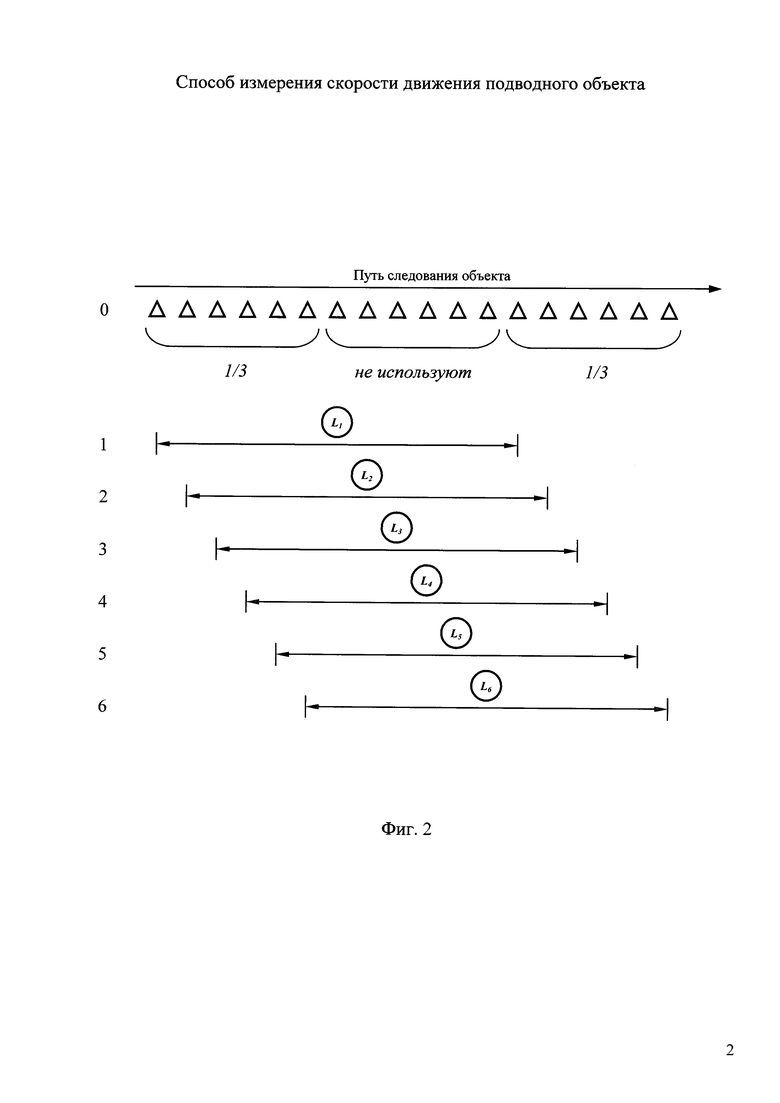
На фиг. 1 схематически представлено устройство для осуществления данного способа, на фиг. 2 и 3 приведены варианты схем, поясняющие процедуру определения приращений перемещений подводного объекта на пути его следования, на фиг. 4 - графики функций, отвечающие приведенным вариантам схем и результатам опытной проверки данного способа, подтверждающие высокую гарантированную точность измерения скорости объекта данным способом.
Устройство для осуществления способа измерения скорости V движения подводного объекта 1 содержит трос 2 соединяющий корму объекта 1 с полиспастом 3, стержень 4, соединяющий полиспаст 3 с потенциометрическим датчиком 5, сигнал от которого усиливает и оцифровывает устройство 6, регистрацию сигнала и последующие вычисления осуществляет устройство 7. Объект 1 движется в заполненном водой бассейне переменных давлений 8, показанном на фиг. 1 в разрезе.
Способ осуществляют следующим образом.
Объект 1, двигаясь слева направо, тянет за собой трос 2, проходящий через полиспаст 3, соединенный со стержнем 4, герметично проходящим через стенку бассейна переменных давлений 8. В результате стержень 4 тоже перемещается слева направо, но за счет полиспаста 3 его перемещение существенно меньше перемещения объекта 1. Перемещение стержня 4 измеряют снаружи бассейна потенциометрическим датчиком 5, электрический сигнал от которого усиливают и оцифровывают устройством 6 с частотой дискретизации, отвечающей требуемой точности измерения скорости движения подводного объекта, регистрируют устройством 7 образующийся при этом временной ряд. Устройством 7 определяют значения интервалов времени между зарегистрированными электрическими сигналами потенциометрического датчика 5 во временном ряду и отвечающие им значения перемещений объекта, преобразуют их, пользуясь одним из вариантов схемы, в приращения времени и приращения перемещений, определяют скорости движения объекта 1.
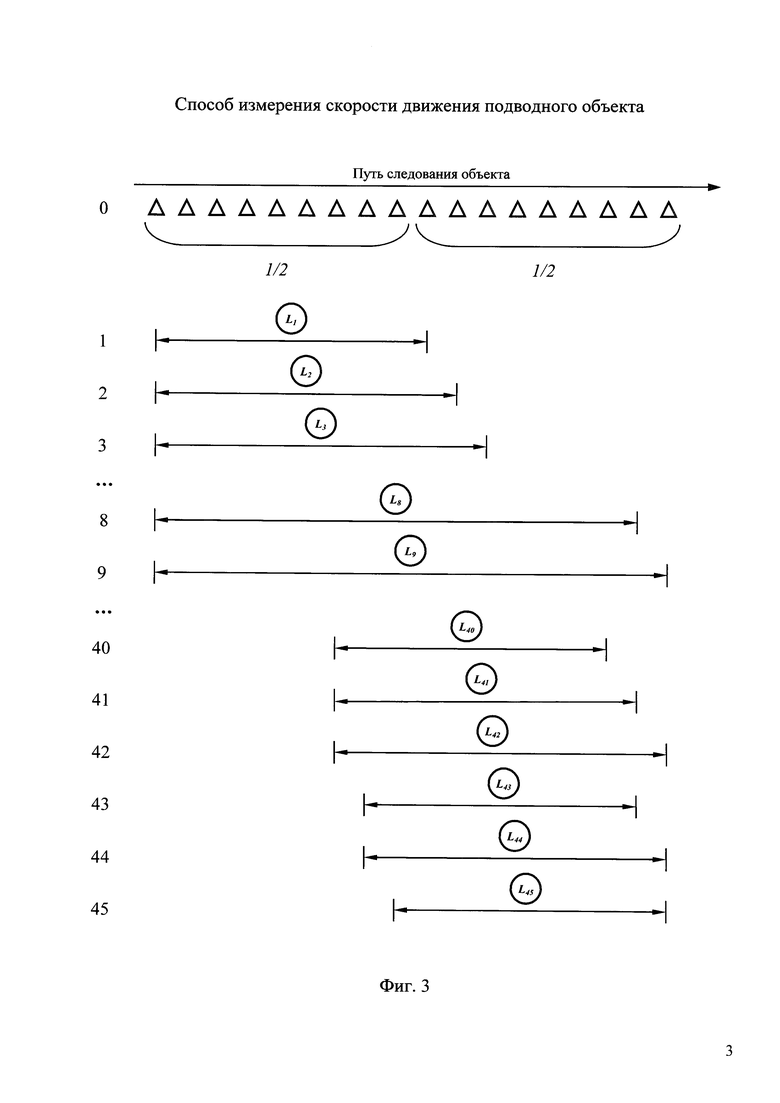
Схемы 0-6 на фиг. 2 иллюстрируют вариант схемы определения приращений перемещений подводного объекта при использовании первой трети и последней трети зарегистрированных значений электрических сигналов потенциометрического датчика. Путь следования объекта после участка разгона размечен на схеме О треугольниками, которые указывают места оцифровки и регистрации сигналов от потенциометрического датчика. Переход от схемы 1 к схемам 2, 3, 4, 5 и 6 демонстрирует процедуру определения приращений перемещений объекта. На схемах 1-6 размерными стрелками между выносными линиями обозначены приращения перемещений Lk, которыми заполняют ячейки одномерной таблицы приращений перемещений объекта.
В данном варианте на пути движения с постоянной скоростью объекта регистрируют 18 значений сигналов потенциометрического датчика. Описываемый способ, реализованный по данному варианту, обеспечивает определение 6-и значений локальной скорости, которые затем осредняют для получения средней скорости V.
Характерным для описываемого способа, реализованного по данному варианту, является исключение из рассмотрения второй трети значений сигналов потенциометрического датчика, зарегистрированных на пути движения объекта с постоянной скоростью, и использование ячеек с одинаковыми номерами - одноименных ячеек - при определении приращений перемещений путем вычитания из значений перемещений, помещенных в ячейки второго столбца двумерной таблицы перемещений объекта, значений перемещений, помещенных в ячейки первого столбца двумерной таблицы перемещений объекта. В самом деле, погрешность измерения средней скорости V находят, пользуясь формулой

где: Δ[t] - погрешность определения приращений времени; ϑ - характерное приращение времени; N - количество приращений перемещений, на которых определяют локальную скорость объекта;  . Здесь
. Здесь  - погрешность определения приращений перемещений.
- погрешность определения приращений перемещений.
Вводим следующие обозначения:  - количество интервалов на участке длиной L, который объект проходит с постоянной скоростью;
- количество интервалов на участке длиной L, который объект проходит с постоянной скоростью;  - оптимальное приращение перемещения. Воспользовавшись зависимостями
- оптимальное приращение перемещения. Воспользовавшись зависимостями  и
и  , находим ϑ=М⋅L/(n⋅V). Подставив это в (1), после преобразований получим
, находим ϑ=М⋅L/(n⋅V). Подставив это в (1), после преобразований получим

где: 
Подставив N=n+1-М в (2), получим соотношение

Из условия dΔ[V]/dM=0 находим, что погрешность Δ[V] минимальна при М=2⋅n/3, при этом N=1+n/3, что соответствует фиг. 2, на которой не используют вторую треть зарегистрированных значений сигналов потенциометрического датчика.
Зафиксировав в (3) погрешность Δ[V] и подставив М=2⋅n/3, после выполнения соответствующих преобразований, получим необходимое для измерения средней скорости объекта с заданной погрешностью Δ[V] количество интервалов n=27⋅γ2/(2⋅Δ[V])2. Зная n и воспользовавшись формулой F=n⋅V/L, определим частоту дискретизации для оцифровки и регистрации сигналов потенциометрического датчика.
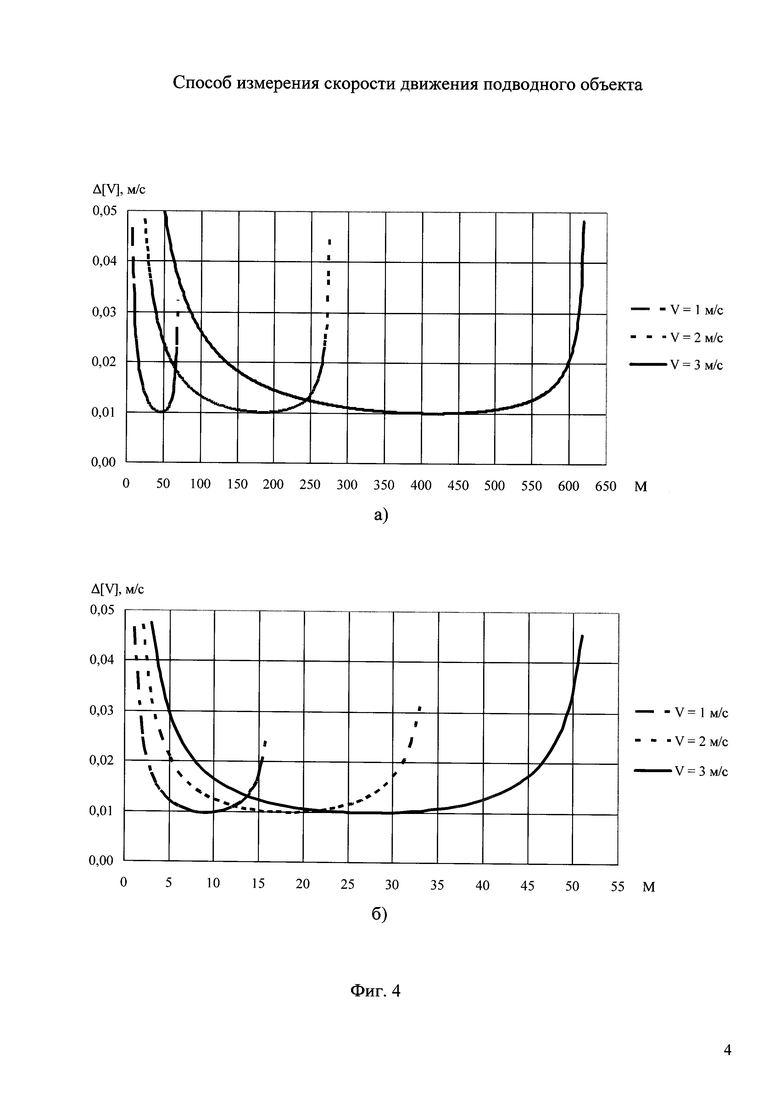
Схемы 0-45 на фиг. 3 иллюстрируют вариант схемы определения приращений перемещений подводного объекта при использовании всех - то есть первой половины и второй половины - зарегистрированных значений электрических сигналов потенциометрического датчика. Схема 0 содержит разметку, аналогичную той, которая использовалась в схеме 0 на фиг. 2. Переход от схемы 1 к схемам 2, 3, 4 и т.д. демонстрирует процедуру определения приращений перемещений подводного объекта. На схемах 1-45 размерными стрелками между выносными линиями обозначены приращения перемещений Lk, которыми заполняют ячейки одномерной таблицы приращений перемещений объекта.
При зарегистрированных 18 значениях электрических сигналов потенциометрического датчика описываемый способ, реализованный по данному варианту, предусматривает определение 45-и значений локальной скорости.
Характерным для описываемого способа, реализованного по данному варианту, является использование всех значений сигналов потенциометрического датчика, зарегистрированных на пути движения объекта с постоянной скоростью, и определение приращений перемещений путем вычитания из значений перемещений, помещенных в ячейки второго столбца двумерной таблицы перемещений объекта, значений перемещений, помещенных в одноименные и не в одноименные ячейки первого столбца таблицы перемещений объекта, при этом таких, чтобы получаемые приращения перемещений превышали приращения перемещений, получаемые путем вычитания из значений перемещений, помещенных в ячейки второго столбца двумерной таблицы перемещений объекта, значений перемещений, помещенных в одноименные ячейки первого столбца двумерной таблицы перемещений объекта или были равны им. Этому варианту отвечает формула для верхней границы погрешности измерения средней скорости

Пользуясь условием dΔ[V]/dM=0, находим, что погрешность Δ[V] минимальна, когда  или М≈0,5⋅n.
или М≈0,5⋅n.
Подставив М≈0,5⋅n в (4) и зафиксировав погрешность Δ[V], после выполнения соответствующих преобразований получим необходимое для измерения средней скорости объекта с заданной погрешностью Δ[V] количество интервалов  , после чего определим частоту дискретизации.
, после чего определим частоту дискретизации.
В способе могут быть использованы варианты схемы, отличные от изображенных на фиг. 2 и 3, но тоже обеспечивающие требуемую точность измерения скорости движения подводного объекта.
Графики функций на фиг. 4 а) соответствуют варианту схемы, изображенному на фиг. 2 при заданной погрешности Δ[V]=0,01 м/с и ω=96 м/с. Назначенные частоты дискретизации 47, 369 и 1246 Гц отвечают количествам интервалов 70, 277 и 623 и обеспечивают измерение скоростей объекта 1, 2 и 3 м/с соответственно. Графики функций на фиг. 4 б) иллюстрируют вариант схемы, изображенный на фиг. 3 при указанных выше заданной погрешности и ω. При измерении тех же скоростей объекта используют существенно меньшие частоты дискретизации 12, 48 и 108 Гц и количества интервалов 18, 36 и 54.
Сведения для расчета параметров устройств, входящих в схему реализации способа, следующие.
Кратность i=Lобъекта/Lдатчика полиспаста должна превышать единицу, то есть используют полиспаст прямого действия. Обычно кратность (передаточное отношение) полиспастов выражают через отношение скоростей ведущего конца гибкого тягового органа к ведомому. Поскольку ведущий и ведомый концы проходят разные расстояния за одинаковое время, оказывается возможным выразить кратность полиспаста через отношение пройденных расстояний. Подводный объект на участке разгона обладает переменной скоростью, далее, на участке, где его скорость измеряют, имеет постоянную скорость, наконец, на участке торможения он снижает скорость и останавливается. Выше обозначено: Lобъекта - сумма длин всех трех участков движения объекта; Lдатчика - ход измеряющего перемещение потенциометрического датчика. При выборе потенциометрического датчика принимают во внимание Lобъекта и кратность полиспаста. Диапазон измерений перемещений потенциометрического датчика должен быть не менее Lдатчика, помимо этого сам датчик должен характеризоваться по возможности меньшей погрешностью и быть согласован по выходному сопротивлению с устройством 6. Полиспаст должен быть конструктивно выполнен так, чтобы трос, идущий от него к корме объекта, не провисал под действием веса подвижной части полиспаста.
В описываемом способе высокоточного измерения скорости движения подводного объекта частоту оцифровки и регистрации электрического сигнала от потенциометрического датчика назначают с учетом требуемой точности измерения скорости упомянутого объекта. Способ несложен в реализации и надежен, в устройстве для его осуществления используют измеряющую перемещение и находящуюся вне бассейна переменных давлений одноканальную измерительную систему, состоящую из потенциометрического датчика и устройства, усиливающего и оцифровывающего электрический сигнал этого датчика, которой необходимы лишь периодические метрологические поверки, что обеспечивает простоту в эксплуатации.
Опытная проверка данного способа с использованием варианта схемы, изображенного на фиг 3, осуществлялась на подводном участке пути длиной 2,025 м в бассейне переменных давлений. Этот путь включал в себя участок длиной 0,3 м разгона объекта, участок длиной 1,4 м, который объект проходит с постоянной скоростью, и участок торможения объекта. Задавалась погрешность измерения скорости движения объекта Δ[V]=0,01 м/с при известных  , Δ[t]=0,0005 с и кратности полиспаста i=6. Скорость объекта измерялась в диапазоне от 1 до 3 м/с. В качестве потенциометрического датчика использовался потенциометр линейный прецизионный проволочный ПЛП11, в качестве оцифровывающего и регистрирующего устройства - прибор измерительный цифровой ИП-3-К. Состоящая из этих приборных средств одноканальная измерительная система включена в Федеральный реестр средств измерений за №40691-09, имеет пределы допускаемой приведенной погрешности ±2% в диапазоне измерений перемещений от нуля до 0,4 м. При неизменных задаваемой скорости подводного объекта, его массе и углу наклона траектории движения по отношению к горизонту отклонения многократно измеренной данным способом средней скорости движения объекта находились в интервале ±0,01 м/с.
, Δ[t]=0,0005 с и кратности полиспаста i=6. Скорость объекта измерялась в диапазоне от 1 до 3 м/с. В качестве потенциометрического датчика использовался потенциометр линейный прецизионный проволочный ПЛП11, в качестве оцифровывающего и регистрирующего устройства - прибор измерительный цифровой ИП-3-К. Состоящая из этих приборных средств одноканальная измерительная система включена в Федеральный реестр средств измерений за №40691-09, имеет пределы допускаемой приведенной погрешности ±2% в диапазоне измерений перемещений от нуля до 0,4 м. При неизменных задаваемой скорости подводного объекта, его массе и углу наклона траектории движения по отношению к горизонту отклонения многократно измеренной данным способом средней скорости движения объекта находились в интервале ±0,01 м/с.
Таким образом, опытная проверка подтвердила, что способ обеспечивает заданную высокую точность измерения скорости движения подводного объекта в сочетании с достаточной надежностью, простотой реализации и эксплуатации устройства для его осуществления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГИСТРАЦИИ ФАЗЫ КВАДРАТУРНЫХ СИГНАЛОВ | 2018 |
|
RU2692965C1 |
| Устройство для обнаружения неоднородности тонкого объекта, имеющей резкие границы, и способ его применения | 2019 |
|
RU2721099C1 |
| Гидродинамический стенд | 2018 |
|
RU2687350C1 |
| УСТРОЙСТВО СКАНИРОВАНИЯ ДЛЯ ДЕКОДИРОВАНИЯ ОПТИЧЕСКИ СЧИТЫВАЕМОЙ ЭТИКЕТКИ И ОПТИЧЕСКИ СЧИТЫВАЕМАЯ ЭТИКЕТКА ДЛЯ ТАКОГО УСТРОЙСТВА | 1989 |
|
RU2081453C1 |
| СПОСОБ И УСТРОЙСТВО (варианты) ДЛЯ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ КОСМИЧЕСКИХ ИЛИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2620853C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ КОСМИЧЕСКИХ ИЛИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2620288C1 |
| УСТРОЙСТВО СКАНИРОВАНИЯ ДЛЯ ДЕКОДИРОВАНИЯ ОПТИЧЕСКИ СЧИТЫВАЕМОЙ ЭТИКЕТКИ И ОПТИЧЕСКИ СЧИТЫВАЕМАЯ ЭТИКЕТКА ДЛЯ ТАКОГО УСТРОЙСТВА | 1989 |
|
RU2078375C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ТОЛЩИНЫ И СПОСОБЫ ЕГО ПРИМЕНЕНИЯ | 2019 |
|
RU2794610C2 |
| СПОСОБ ЛОКАЦИИ | 2005 |
|
RU2296350C1 |
| СПОСОБ ИЗМЕРЕНИЙ И ОБРАБОТКИ НАЧАЛЬНЫХ НЕПРАВИЛЬНОСТЕЙ ФОРМЫ ТОНКОСТЕННЫХ ЦИЛИНДРИЧЕСКИХ ОБОЛОЧЕК | 2015 |
|
RU2605642C1 |

Изобретение относится к измерительной технике, в частности может быть использовано при аттестации бассейнов переменных давлений в качестве испытательного оборудования, опытной отработке в них пусковых устройств необитаемых малогабаритных подводных аппаратов, проведения гидродинамических испытаний натурных и модельных подводных объектов. Сущность: электрический сигнал потенциометрического датчика оцифровывают и регистрируют в виде временного ряда с частотой, обеспечивающей требуемую точность измерения скорости прямолинейного движения подводного объекта, который с помощью троса и полиспаста механически связывают с упомянутым датчиком, используя один из вариантов схемы, которая учитывает требуемую точность измерения скорости движения подводного объекта, преобразуют временной ряд в значения приращений перемещений и значения приращений времени, определяют локальные скорости и среднюю скорость движения объекта. Техническим результатом является измерение скорости движения подводного объекта с гарантированной высокой точностью без потерь в надежности и простоте реализации способа и эксплуатации устройства для его осуществления. 4 ил.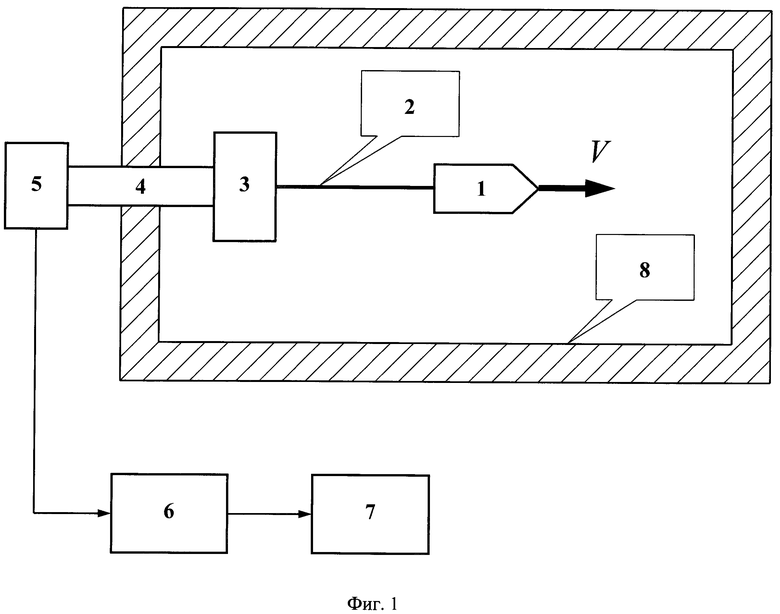
Способ измерения скорости движения подводного объекта, по которому объект, двигаясь прямолинейно, тянет за собой трос, один конец которого закрепляют на корме объекта, поступательное движение троса преобразуют с помощью технических средств в электрический сигнал, который регистрируют техническими средствами в виде временного ряда, пройденный объектом путь (приращение перемещения объекта) делят на затраченное время (приращение времени), отличающийся тем, что трос пропускают через полиспаст, уменьшающий в несколько раз перемещение, уменьшенное перемещение посредством стержня герметичным образом передают из бассейна переменных давлений наружу размещенному вне бассейна переменных давлений потенциометрическому датчику, тем самым обеспечивают изменение на выходе последнего величины электрического сигнала, который с частотой дискретизации, отвечающей требуемой точности измерения скорости движения подводного объекта, оцифровывают и регистрируют, пользуясь градуировочной характеристикой потенциометрического датчика, определяют перемещения стержня, пользуясь известной частотой дискретизации, с которой образован временной ряд, определяют значения времени, отвечающие перемещениям стержня, заполняют значениями времени ячейки одномерной таблицы значений времени, определяют значения перемещений объекта посредством умножения перемещений стержня на кратность полиспаста, заполняют значениями перемещений объекта ячейки одномерной таблицы значений перемещений объекта, находят в одномерной таблице значений перемещений объекта номер p ячейки, в которой значение перемещения объекта превышает длину участка разгона объекта, но находится ближе к ней, чем значения перемещений в остальных ячейках таблицы, находят в одномерной таблице значений перемещений объекта номер q ячейки, в которой значение перемещения объекта не превышает суммы длин участка, на котором объект двигался с постоянной скоростью, и участка разгона объекта, но находится ближе к этой сумме, чем значения перемещений в остальных ячейках таблицы, переписывают в ячейки первого столбца, содержащей два столбца двумерной таблицы перемещений объекта, последовательно, начиная с имеющей номер p ячейки, от одной трети до половины всех значений перемещений объекта, которые размещены в ячейках с номерами от p до q, переписывают в ячейки второго столбца двумерной таблицы перемещений объекта от одной трети до половины всех значений перемещений объекта, которые размещены в ячейках с номерами от p до q, завершая последовательное заполнение второго столбца двумерной таблицы значением перемещения объекта, который размещен в ячейке с номером q, переписывают значения времени из ячеек одномерной таблицы значений времени в содержащую два столбца двумерную таблицу времени таким образом, чтобы получить взаимно однозначное соответствие с двумерной таблицей перемещений объекта, пользуясь содержимым ячеек двумерной таблицы перемещений объекта, используя один из вариантов схемы, которая учитывает требуемую точность измерения скорости движения объекта, формируют одномерную таблицу приращений перемещений, идентичным образом, пользуясь содержимым ячеек двумерной таблицы времени, формируют одномерную таблицу приращений времени, путем деления содержимого имеющих одинаковые номера ячеек таблицы приращений перемещений на содержимое ячеек таблицы приращений времени, определяют локальные скорости движения объекта, осредняя локальные скорости, определяют среднюю скорость объекта после прохождения им участка разгона.
| ГИДРОДИНАМИЧЕСКАЯ УСТАНОВКА ДЛЯ МОДЕЛЬНЫХ ИСПЫТАНИЙ ПОДВОДНЫХ СНАРЯДОВ | 1995 |
|
RU2203469C2 |
| Способ измерения скорости движения объекта | 1982 |
|
SU1068818A1 |
| Козин В.М | |||
| Резонансный метод разрушения ледяного покрова | |||
| Изобретения и эксперименты | |||
| Акад | |||
| естествознания, 2007 | |||
| Дородных В | |||
| Организация испытаний подводного оружия в ВМС США | |||
| Морской сборник | |||
| - М.: Воениздат, 1980, N8, с.72 | |||
| Стендовая установка для моделирования воздействия воды на подводное устройство | 1990 |
|
SU1730546A1 |

