Изобретение относится к измерению параметров движения и касается преимущественно измерения скорости, например, спортсмена-пловца или .движущегося объекта.
Известен способ пассивной локации когда на спортсмене в опеделенных точках размещают активные излучатели. Снгналы от этих излучателей при движении приобретают допплеровское смещение, которое затем выделяют из принятого сигнала IJ.
Однако на спортсмене необходимо располагать дополнительную аппаратуру, что изменяет картину движений спортсмена, затрудняет ему выполнять задание тренера. , ,
Наиболее близким по технической сущности к изобретению является способ измерения скорости движения объекта, скорость которого измеряют относительно равномерно распределенных вдоль пути движения датчиков, последовательно возмущаекых при движении объекта, включающий измерение интенсивности возмущения объектом каждого атчика, формирование команды для одключения следующего датчика по остижении заданного значения его выходного сигнала и определение величины сксчрости по величине сигНёша датчика.
В этом способе последовательную егистрацию интенсивностей поля осуцествляют -с момента выявления макимума этого сигнала« Одновременно егистрируются либо заполмнаются сигналы только одного датчика. пределение скорости производится в результатов ангшиза запомненных и текущих значений интенсивности измеренного поля. При этом опредеяется приращение амплитуда за искретные промежутки времени, KOTOpiiie с учетом конкретной конструкции датчика и характера измеряемых 4я1зическнх полей преобразуют в величину пройденного за заданный п ромежуток времени пути 23,
Однако осуЕвествление синхронизации по значениям максимума интенсивнбсти снижают точность измерения. Последнее вытекает из того, что махснмум из-за конструктивных особенностей датчиков на может быть крутым (ярко шфаженньв) h Это вносит сшибку в измерение. Кроме того, невозможно измерять скорости движения объекта в случае его отклонения от движения по прямой, расположенной в одной плоскости.
Целью изобретения является пошяаение точности измерения.
Поставленная цель достигается тем, что согласно способу измерения скорости движения объекта относительно равномерно распределенных вдоль путг движения датчиков, последовательно возмущаемых при движении объекта, включающему измерение интенсивности возмущения объектом, каждого датчика, формирование команды для подключения следующего дат|чика по достижению заданного значе иия его выходного сигнала и определение величины скорости по изменению величины сигнала датчика, при измерении интенсивности возмущения предьщущего датчика дополнительно проводят измерение интенсивности возмущения следующего датчика в интервале между ними, а подключение следующего датчика производят при равенстве величин сигналов двух смежных датчиков.
При условии сохранения равным расстояния между датчиками каждаай датчик работает и производит .измерение интенсивности не на всем участке между датчиками, а на половине этого промежутка. В результате косинус-синусные преобразования вносят меньшую погрешность в пересчет интенсивности в величину пройденного пути, и точность измерения повьлиается. При равной точности измерения, предлагаемой способ позволит снизить количество датчиков. И, наконец, синхронизация ПО-равенству интенсивностей, позволяет проводить анализ сложных движений рук и ног спортсмена.
На чертеже приведена блок-схема устройства для реализации способа.
Для измерения скорости объекта 1 устройство содержит датчики 2 интенсивности поля, вычислительный блок коммутатор 4, блок 5 памяти, вычислитель 6 скорости, временной ,5, 7, блок 8 регистрации,
измерения скорости движечи$|Робъекта реализуется следующим образом.
Вдоль мерного пути на одинаковом фиксированном расстоянии друг от друга располагают датчики 2 для изнюрения интенсивности поля движущегося объекта 1. При движение объета вдоль датчиков 8 последние регистрируют изменения интенсивности поля, вызванные перемещением объекта 1 . При происходит одновременное измерение интенсивностей в двух соседних датчиках, между которыми в данный момент объект 1 движется. Зарегистрированные сигналы сравнивают и определяют момент времени, когда эти сип глы равны. В случае идентичности датчиков этот момент времени соответствует нахождению объекта на равном расстоянии от датчиков.
Момент времени равенства интеноивностей поля используют для синхронизации процесса измерения. С этого момента сигнал интенсивности поля, регистрируемый датчиком, к которому объект приближается, запоминают. Второй синхронизирующий импульс появляется при пересечении объектом 1 серединной точки следующего промежутка. С этого ьюмента в;-емени появляется сигнал .со следующего датчика, к котарану объект приближается и т.д.
Полученные запомненный и текущий сигналы используют для определения приращения гимплитуд: сигнала за дискретные прсмежутки времени, которые затем пересчитывают в пройденный путь и с учетом заданного времени в мгновенную скорость.
Расстояние между датчиками 2 должно быть не больше допустимого обуславливаемого возможностью линейного преобразования интенсивности в путь. Погрешность этого шреобразования определяется погрешностью замены функции синуса линейным преобразованием.
Вычислительный блок 3 осуществляет управление работой всей остальной частн схемы, в связи с этим он связан с коммутатором 4, осуществляющим последовательное подключение датчиков 2 к блоку 5 памяти или не.посредственно к вычис0 лителю б скорости.Вычислитель 6 скорости по запомненным и текупо м значениям интенсивностей определяет приращение амплитуды за дискретные промежутки времени, задаваемые вре5 манным блоком 7, и преобразует эти приращения в величину приращения пути.
На выходе вычислителя 6 образуется сигнсш, -пропс ционсшьный мгновенной скорости цвижения объекта.
Таким образом, предпагаем:1й способ позволяет повысить точность измерения.
СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЙ ОБЪЕКТА, относительно Eh Е I I равномерно распределенных вдоль пути движения датчиков, последовательно возмущаемых при движении объекта, включающий измерение интенсивности возмущения объектом каждого датчика, формирование команды для подклкиения следующего датчика по достижению заданного значения его выходного сигнала и определение величины скорости по изменению величины сигнала датчика, отличающийся тем, что, с целью првышения точности, при измерении интенсивности возмущения предьщущего датчика до;полнительно проводят измерение интенсивности возмущения следующего датчика в интервале между ними, (Л а подключение следующего датчика производят при равенстве величин сигналов двух смежных датчиков. 05 00 (50 00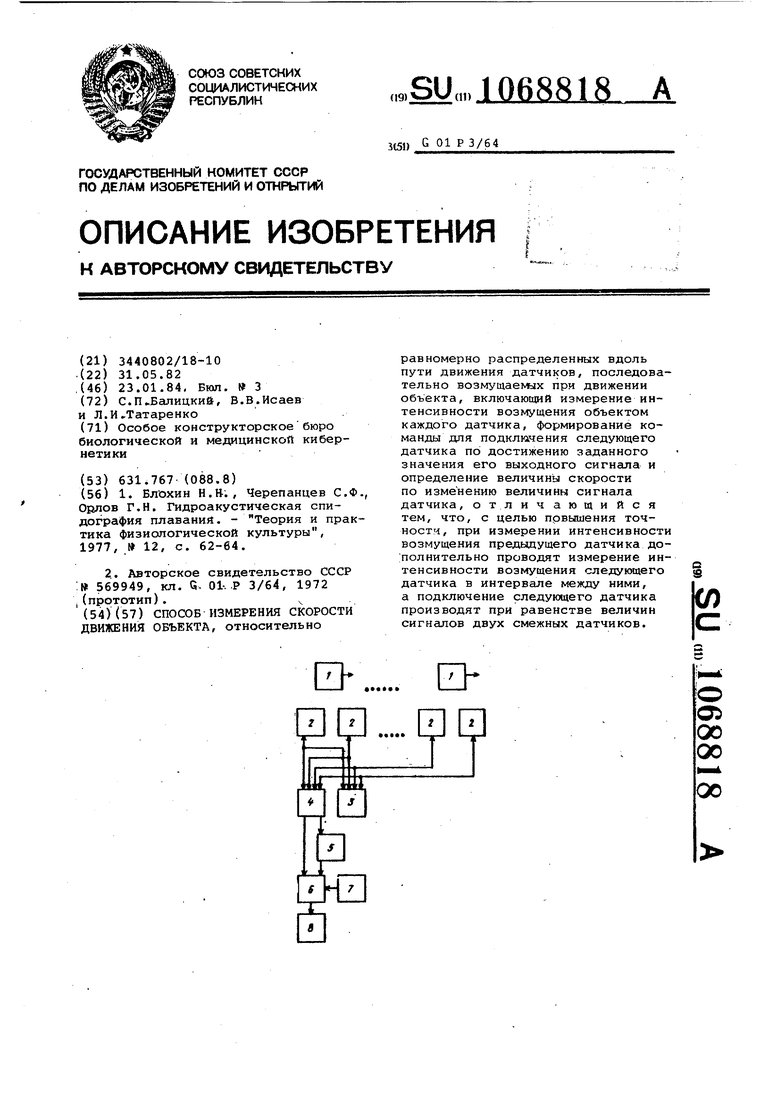
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Блохин Н.Н;, Черепанцев С.Ф., Орлов Г.Н | |||
| Гидроакустическая спидография плаваний | |||
| - Теория и практика физиологической культуры, 1977, 12, с | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для измерения скорости | 1975 |
|
SU569949A1 |
| Q | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
