Изобретение относится к радионавигации и может быть использовано для измерения высоты и составляющих скорости воздушного судна (ВС).
Достигаемый технический результат - повышение точности и устойчивости однолучевого измерения высоты, путевой и вертикальной скорости ВС над различными видами поверхности.
Изобретение может быть использовано в радиовысотомерах (РВ) воздушных судов, в том числе и в РВ беспилотных летательных аппаратов.
Эффективность существующих на сегодняшний момент автономных малогабаритных радиотехнических навигационных систем, определяемая качеством формируемых оценок параметров полета воздушного судна, в том числе, зависит от типа подстилающей поверхности. При этом в условиях ограничений по масса-габаритным характеристикам и априорной неопределенности типа земной (водной) поверхности, в создаваемых высокоточных системах пилотажно-навигационных комплексов, целесообразно использовать способы однолучевого измерения высоты и составляющих скорости ВС.
Известен способ [1], в котором измеряются путевая и вертикальная скорость ВС по сигналам когерентного РВ. Суть способа заключается в том, что в когерентном радиовысотомере, на основе преобразования Фурье эхо-сигнала, формируется дальностно-доплеровский портрет (ДДП) подстилающей поверхности. Вид этого ДДП P(Vп, Vв, n, kF) зависит от известных характеристик РВ и, в том числе, определяется скоростью полета ВС

где Vп - значение путевой скорости ВС;
Vв - значение вертикальной скорости ВС;
n - номер канала дальности;
kF - индекс доплеровского фильтра, 
N - число когерентно накапливаемых отраженных сигналов, соответствует числу доплеровских фильтров, выполняющих спектральный анализ сигнала;
S0 - нормирующий коэффициент мощности, определяемый характеристиками РВ;
δR - разрешение по дальности;
Т - период когерентного накопления отраженного сигнала;
δF - разрешение по частоте;
λ - длина волны зондирующего сигнала;
β - азимутальная координата разрешаемого элемента поверхности;
Н - высота полета ВС.
На основе сравнения сформированного по эхо-сигналу РВ дальностно-доплеровского портрета с множеством эталонных ДДП (1), рассчитанных для всевозможных значений вертикальной и путевой скорости ВС, оценивают  Оценку находят по критерию максимума логарифма функции правдоподобия
Оценку находят по критерию максимума логарифма функции правдоподобия

где  - комплексная амплитуда сигнала, отраженная (n, kF) элементом ДДП;
- комплексная амплитуда сигнала, отраженная (n, kF) элементом ДДП;
Рш - мощность шума.
Недостатком способа является то, что, во-первых, при ограниченной длительности сеанса излучения РВ флуктуационная ошибка оценок составляющих скорости ВС сильно зависит от типа подстилающей поверхности; во-вторых, способ может быть реализован на БЦВМ в реальном времени только с использованием большого количества вычислительных ресурсов, особенно в условиях априорной неопределенности по высоте полета ВС.
Известен способ [2], в котором определение путевой и вертикальной скорости ВС производится за счет анализа мгновенных значений взаимно-корреляционной функции (ВКФ) отраженного от земной поверхности сигнала между двумя приемными и одной приемопередающей антенной с известной геометрией взаимного расположения. Суть способа заключается в том, что производится излучение приемо-передающей антенной в направлении подстилающей поверхности коротких пачек радиоимпульсов, прием разнесенными на ВС с учетом геометрии антенной системы приемными и приемопередающей антенной отраженных от земной поверхности радиоимпульсов, вычисляются мгновенные значения взаимно-корреляционных функций, между сигналами, принятыми 1-ой, 2-ой и 3-ей антеннами


где В - количество отсчетов времени в базовом интервале, использующемся при построении ВКФ;
Z - номер отсчета ВКФ, соответствующий 0-й задержке между сигналами;
F12k - ВКФ между сигналами, принятыми на 1-ую и 2-ую антенны;
F23k - ВКФ между сигналами, принятыми на 2-ую и 3-ую антенны;
 - нормированные сигналы, принятые на 1-ую, 2-ую и 3-ую антенны в моменты времени k;
- нормированные сигналы, принятые на 1-ую, 2-ую и 3-ую антенны в моменты времени k;
вычисления положения максимума ВКФ (в относительных единицах) Nt12, Nt23.
По известному взаимному расположению излучающей и приемных антенн Х0, Y0, вычисляют составляющие вектора скорости Vп, Vв


где τ1, τ2 - транспортная задержка между сигналами, принятыми на 1-ую и 2-ую антенны и 2-ую и 3-ую антенны соответственно,
 Δt - дискрет построения ВКФ, равный временному шагу оцифровки сигнала;
Δt - дискрет построения ВКФ, равный временному шагу оцифровки сигнала;
Недостатками способа являются, во-первых, влияние структуры поверхности на точность измерения и устойчивость работы над спокойной водной поверхностью, во-вторых, большие масса-габаритные характеристики антенной системы устройства, реализующего способ, по сравнению с антенной системой РВ.
Наиболее близким по технической сущности к заявляемому способу является способ [3] измерения высоты и составляющих скорости ВС, заключающийся в том, что измерение высоты и составляющих скорости ВС происходит за счет вертикального зондирования земной поверхности радиолокационным сигналом через широконаправленную антенну, когерентного приема отраженного сигнала с получением двумерного ДДП местности в координатах дальность-доплеровская частота, первичной оценки высоты воздушного судна как минимальной, усредненной по нескольким измерениям дальности до разрешаемых участков ДДП, превышающих порог обнаружения, нахождения кривой максимального контраста ДДП в координатах дальность-доплеровская частота, уточнения методом итераций гипотезы измеряемых параметров за счет расчета кривой максимального контраста, соответствующей гипотезе, формирования сигнала ошибки кривой максимального контраста гипотезы относительно наблюдаемой кривой максимального контраста ДДП земной поверхности, преобразования сигнала ошибки кривой максимального контраста в сигнал ошибки измеряемых параметров, сложения его с уточняемой гипотезой, повторения итераций и выдачи в режиме слежения оценок  высоты, путевой и вертикальной составляющих скорости ВС.
высоты, путевой и вертикальной составляющих скорости ВС.
В качестве недостатков способа однолучевого измерения высоты и составляющих скорости воздушного судна, который используется в качестве прототипа, можно выделить следующие:
- флуктуационная ошибка высоты и составляющих скорости ВС сильно зависит от уровня боковых лепестков эхо-сигнала в ДДП, что особенно сильно проявляется над гладкой водной поверхностью;
- в зависимости от высоты ВС число разрешаемых точек поверхности, находящихся на кривой максимального контраста, может оказаться недостаточным для получения оценок высоты и составляющих скорости ВС с допустимой флуктационной ошибкой на допустимой длительности сеанса излучения РВ.
Эти недостатки накладывают ограничения на применение способа, связанные с высотой полета воздушного судна, влияют на устойчивость и точность определения навигационных параметров над различными видами подстилающей поверхности.
Целью изобретения является повышение точности и устойчивости однолучевого измерения высоты, путевой и вертикальной скорости ВС над различными видами поверхности.
Указанный результат достигается за счет:
нахождения кривой максимального контраста двумя независимыми способами по дальности и частоте, их суммирования с получением результирующей кривой максимального контраста;
использования в качестве второго независимого способа нахождения кривой максимального контраста перебор гипотез о положении скачков мощности эхо-сигнала на кривой максимального контраста и нахождение гипотезы, дающей максимум логарифма функционала правдоподобия положения наблюдаемых скачков мощности эхо-сигнала на двух частотах kF1(n) и kF2(n);
некогерентного суммирования кривых максимального контраста нескольких ДДП и морфологической обработки результирующей кривой максимального контраста с отбрасыванием ложных отсчетов;
нахождения оптимальной текущей оценки вектора состояния  через нелинейную фильтрацию невязки результирующей наблюдаемой кривой максимального контраста с прогнозируемой кривой максимального контраста, соответствующей предшествующему вектору состояния.
через нелинейную фильтрацию невязки результирующей наблюдаемой кривой максимального контраста с прогнозируемой кривой максимального контраста, соответствующей предшествующему вектору состояния.
Пояснения к способу измерения высоты и составляющих скорости воздушного судна по сигналам РВ заключаются в следующем. В способе-прототипе оценка высоты, путевой и вертикальной составляющих скорости воздушного судна  происходит следующим образом.
происходит следующим образом.
Производится вертикальное зондирование земной поверхности РВ пачкой когерентных радиоимпульсов;
Когерентный прием отраженного сигнала, вычисление дальностно-доплеровского портрета земной поверхности  в координатах дальность-доплеровская частота (n, kF) на основе спектрального Фурье анализа эхо-сигналов в каждом канале дальности n;
в координатах дальность-доплеровская частота (n, kF) на основе спектрального Фурье анализа эхо-сигналов в каждом канале дальности n;
Получение первичной оценки высоты воздушного судна  как минимальной, дальности до разрешаемых элементов ДДП, мощность отраженного сигнала от которых превышает порог обнаружения;
как минимальной, дальности до разрешаемых элементов ДДП, мощность отраженного сигнала от которых превышает порог обнаружения;
Определение номера канала дальности, соответствующего оценке высоты ВС

где  - операция округления до большего целого.
- операция округления до большего целого.
Определение дисперсии шума  и сигнала с шумом
и сигнала с шумом  в каждом разрешаемом элементе кадра ДДП, исходя из предположения о положении скачка мощности сигнала в канале дальности n=n(kF)
в каждом разрешаемом элементе кадра ДДП, исходя из предположения о положении скачка мощности сигнала в канале дальности n=n(kF)

где Рпр (n, kF) - средняя мощность сигнала, отраженного разрешаемым элементом сцены с координатами (n, kF),
K - длина реализации полученного в выбранном окне дальностей участка ДДП по дальности, выраженная в числе разрешаемых элементов δR;
Вычисление логарифма функции правдоподобия  принятой огибающей амплитуды отраженного сигнала z в канале частоты kF для гипотезы (n, kF) положения скачка мощности в канале дальности n
принятой огибающей амплитуды отраженного сигнала z в канале частоты kF для гипотезы (n, kF) положения скачка мощности в канале дальности n

Нахождение положения скачка дисперсии сигнала на ДДП по гипотезе, дающей максимум логарифма функции правдоподобия 
Построение по результатам определения скачка во всех каналах частоты kF кадра ДДП кривой nR(kF) максимального контраста наблюдаемого ДДП;
Расчет для i-той гипотезы вектора состояния ВС  дальности точек кривой максимального контраста Ri(kF, Xi)
дальности точек кривой максимального контраста Ri(kF, Xi)

Значения Ri берутся в диапазоне от первичной оценки канала высоты  до положения максимально удаленной точки ДДП, амплитуда которой превышает порог обнаружения.
до положения максимально удаленной точки ДДП, амплитуда которой превышает порог обнаружения.
В качестве исходной гипотезы (i=0) берем высоту  в качестве значений путевой Vпi и вертикальной VBi берутся соответствующие центральные значения априорно известных окон.
в качестве значений путевой Vпi и вертикальной VBi берутся соответствующие центральные значения априорно известных окон.
Находят матрицу-якобиан Di(kF, Xi) размерностью N х 3 для каждого канала частоты kF преобразованием Ri(kF, Xi) - расчетной дальности точек максимального контраста для гипотезы Хi






Находят оптимальную оценку ошибки ΔXi вектора Xi относительно истинного значения


где Wi - весовая матрица
ϕ - корреляционная матрица шумов
 - вектор, описывающий кривую максимального контраста наблюдаемого ДДП;
- вектор, описывающий кривую максимального контраста наблюдаемого ДДП;
 - вектор, описывающий кривую максимального контраста для i-той гипотезы;
- вектор, описывающий кривую максимального контраста для i-той гипотезы;
Формируют новую (i+1) гипотезу оценки вектора состояния ВС

Повтор итераций уточнения вектора оцениваемых параметров Xi до снижения вектора ошибки ΔXi до допустимых значений, переход в режим слежения, выдача потребителю оценки высоты, путевой и вертикальной скорости  в режиме слежения.
в режиме слежения.
Предлагаемый способ оценки высоты Н и составляющих скоростей Vп, Vв воздушного судна включает:
Вертикальное излучение зондирующего сигнала через широко направленную антенну радиовысотомера;
Когерентный прием эхо-сигнала и получение двумерного дальность-доплеровского портрета облучаемой местности 
Получение первичной оценки высоты воздушного судна (ВС)  как минимальной, усредненной по нескольким измерениям дальности до разрешаемых элементов ДДП, мощность отраженного сигнала от которых превышает порог обнаружения;
как минимальной, усредненной по нескольким измерениям дальности до разрешаемых элементов ДДП, мощность отраженного сигнала от которых превышает порог обнаружения;
Определение номера канала дальности, соответствующего оценке высоты ВС

где δR - разрешение зондирующего сигнала по дальности;
Определение дисперсии шума  и сигнала с шумом
и сигнала с шумом  в каждом разрешаемом элементе кадра ДДП, исходя из предположения о положении скачка мощности сигнала на дальности n=n(kF)
в каждом разрешаемом элементе кадра ДДП, исходя из предположения о положении скачка мощности сигнала на дальности n=n(kF)

где K - длина реализации отселектированного участка ДЦП по дальности, выраженная в числе разрешаемых элементов δR;
Вычисление логарифма функционала правдоподобия  принятой огибающей амплитуды отраженного сигнала z на частоте kF для гипотезы (n, kF) положения скачка мощности на дальности n при доплеровской частоте kF для каждого сформированного ДДП
принятой огибающей амплитуды отраженного сигнала z на частоте kF для гипотезы (n, kF) положения скачка мощности на дальности n при доплеровской частоте kF для каждого сформированного ДДП 

Нахождение положения скачка дисперсии сигнала на кривой максимального контраста по наблюдаемому ДДП nR(kF) по гипотезе, дающей максимум логарифма функционала правдоподобия 
Формирование вектора  описывающего кривую максимального контраста наблюдаемого ДДП;
описывающего кривую максимального контраста наблюдаемого ДДП;
Формирование гипотез о векторе состояния ВС  - высота, путевая и вертикальные скорости ВС для i - индекс гипотезы. Для исходной гипотезы (i=0) значение высоты H0 берется равным
- высота, путевая и вертикальные скорости ВС для i - индекс гипотезы. Для исходной гипотезы (i=0) значение высоты H0 берется равным  , в качестве значений путевой Vп0 и вертикальной VB0 составляющих скорости ВС берутся соответствующие центральные значения априорно известных окон;
, в качестве значений путевой Vп0 и вертикальной VB0 составляющих скорости ВС берутся соответствующие центральные значения априорно известных окон;
Вычисление для гипотезы вектора состояния ВС  дальностей ВС до точек кривой максимального контраста Ri(kF1, Xi)
дальностей ВС до точек кривой максимального контраста Ri(kF1, Xi)

i - индекс гипотезы;
В расчетах Ri берут точки кривой максимального контраста, находящиеся в диапазоне дальностей от первичной оценки канала высоты  до положения максимально удаленной точки ДДП (nR,kF), амплитуда которой превышает порог обнаружения;
до положения максимально удаленной точки ДДП (nR,kF), амплитуда которой превышает порог обнаружения;
Формирование вектора кривой максимального контраста для i-той гипотезы

Вычисление матрицы-якобиана Di(kF,Xi) i-той гипотезы преобразованием вектора  размером N x 3 для каждого канала частоты kF
размером N x 3 для каждого канала частоты kF
Находят оптимальную оценку ошибки ΔXi вектор-гипотезы Xi относительно истинного значения [5]
где Di=Di(kF, Xi),
ϕ - корреляционная матрица шумов измерения дальностей Ri(kF) размерностью N х N,
 - вектор, описывающий кривую максимального контраста наблюдаемого ДДП;
- вектор, описывающий кривую максимального контраста наблюдаемого ДДП;
Формируют новую (i+1) гипотезу оценки вектора состояния ВС

Повторяют итерации уточнения вектора оцениваемых параметров Хi до снижения вектора ошибок ΔXi до допустимых значений, переходят в режим слежения, выдают потребителю оценки высоты, путевой и вертикальной скорости  в режиме слежения;
в режиме слежения;
Отличающийся тем, что сеанс измерения дополнительно включает
Получение М последовательных ДДП 
 для каждого из которых находят положения скачков дисперсии сигнала (nR, kF)m;
для каждого из которых находят положения скачков дисперсии сигнала (nR, kF)m;
Формирование вектора описывающего кривую максимального контраста наблюдаемого ДДП, производят через дополнительную процедуру, включающую:
Создание нулевых матриц Am для каждого из М кадров ДЦП из K строк и N столбцов, где индекс строки равен индексу канала дальности n, индекс столбца равен индексу доплеровского фильтра kF;
Замену значения элемента матрицы Am с координатами (nR, kF)m, соответствующим положению скачка дисперсии сигнала кадра ДЦП на дальности n, на «1»;
Замену значений элементов матрицы Am, у которых координата дальности 
Формирование результирующей кривой максимального контраста наблюдаемого ДДП  в последовательности:
в последовательности:
Выдвигают гипотезы  о скачках мощности сигнала ДЦП в каждом канале дальности n на доплеровских частотах
о скачках мощности сигнала ДЦП в каждом канале дальности n на доплеровских частотах 
Вычисляют дисперсии шума  и сигнала с шумом
и сигнала с шумом 

Вычисляют логарифм функции правдоподобия  принятой огибающей амплитуды отраженного сигнала
принятой огибающей амплитуды отраженного сигнала  в канале дальности n для гипотезы 1 о положения скачка мощности на частотах kF1(n, l) и kF2(n, l) для каждого из М сформированных ДДП
в канале дальности n для гипотезы 1 о положения скачка мощности на частотах kF1(n, l) и kF2(n, l) для каждого из М сформированных ДДП

Находят положения kF1(nR) и kF2(nR) скачков дисперсии сигнала на кривой максимального контраста ДЦП по гипотезам, дающим максимум логарифма функционала правдоподобия 
Формируют нулевые матрицы Вm для каждого из М кадров ДДП из K строк и N столбцов, где индекс строки равен индексу канала дальности n, индекс столбца равен индексу доплеровского фильтра kF;
Заменяют значения элементов матрицы Вm с координатами (nR,kF)m на «1» на частотах kF1, kF2;
Вычисляют матрицу С

Для каждого элемента матрицы С с координатами (nR, kF) формируют квадратную матрицу Gj размером 3x3, j=1…nRkF

Рассчитывают сумму всех элементов Gj, если сумма равна 1, значение  заменяют «0»; Данная операция исключает из результирующей кривой максимального контраста nRΣ(kF) отсчеты, которые по координате дальности или частоты не имеют ни одного соседнего отсчета.
заменяют «0»; Данная операция исключает из результирующей кривой максимального контраста nRΣ(kF) отсчеты, которые по координате дальности или частоты не имеют ни одного соседнего отсчета.
Определяют дальность ВС до точек кривой максимального контраста наблюдаемого ДДП nRΣ(kF) по координатам ненулевых элементов матрицы С;
Формируют вектор n, описывающий кривую максимального контраста наблюдаемого ДДП

Сущность предлагаемого способа однолучевого измерения высоты и составляющих скорости воздушного судна поясняется дальнейшим описанием и чертежами.
На фиг. 1 представлен вид сечения логарифма функции правдоподобия  в зависимости от индексов доплеровского фильтра kF1 и kF2 для одного канала дальности.
в зависимости от индексов доплеровского фильтра kF1 и kF2 для одного канала дальности.
На фиг. 2 представлена результирующая кривая максимального контраста nRΣ(kF).
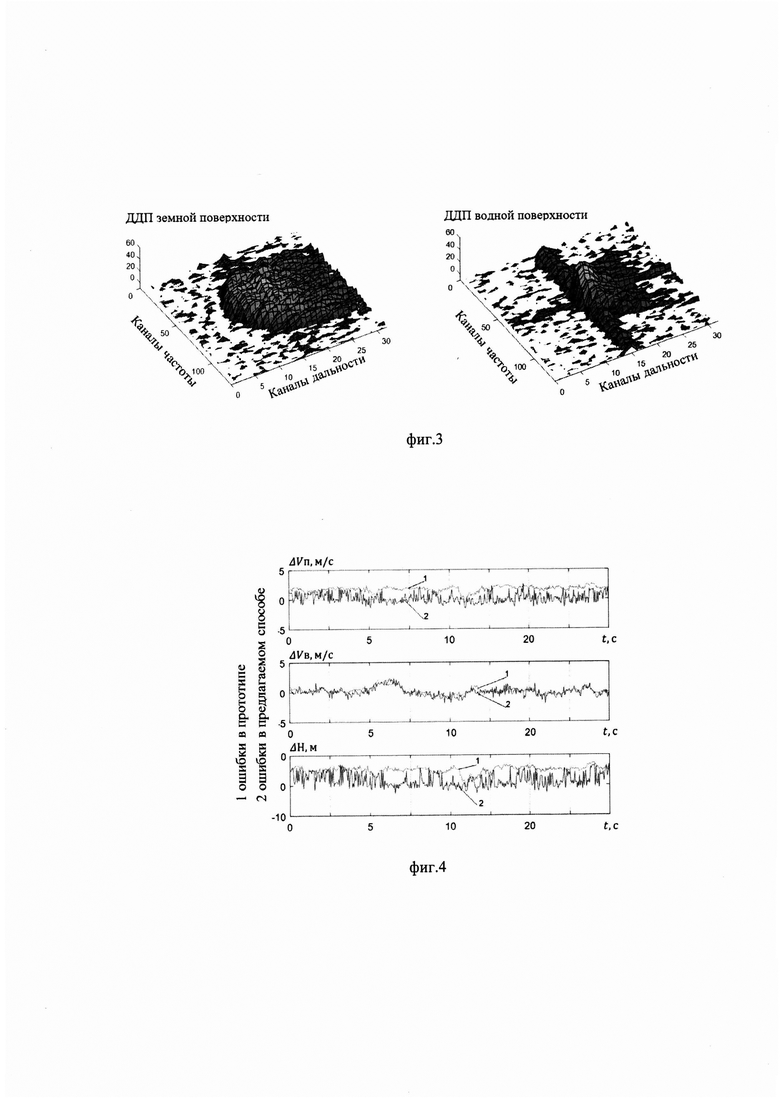
На фиг. 3 представлены ДДП, полученные при полете ВС над степной местностью и водной поверхностью;
На фиг. 4 представлена зависимость СКО оценок высоты, путевой и вертикальной скорости воздушного судна для предлагаемого способа (кривая 2) и способа-прототипа (кривая 1) по результатам полунатурного моделирования.
Предлагаемый способ однолучевого измерения высоты и составляющих скорости воздушного судна реализуется следующим образом.
Через широко направленную антенну радиовысотомера излучают вертикально вниз зондирующий сигнал;
Когерентно принимают эхо-сигнал и формируют М дальностно-доплеровских портретов  где каждый
где каждый  - спектральное преобразование Фурье эхо-сигнала РВ на всех дальностях n рабочего диапазона высот, М - варьируемый параметр, определяемый скоростными характеристиками носителя, m - индекс ДДП;
- спектральное преобразование Фурье эхо-сигнала РВ на всех дальностях n рабочего диапазона высот, М - варьируемый параметр, определяемый скоростными характеристиками носителя, m - индекс ДДП;
Получают первичную оценку высоты ВС  как минимальную, усредненную по нескольким измерениям дальность до разрешаемых элементов ДДП, мощность отраженного сигнала от которых превышает порог обнаружения;
как минимальную, усредненную по нескольким измерениям дальность до разрешаемых элементов ДДП, мощность отраженного сигнала от которых превышает порог обнаружения;
Определяют номер канала дальности, соответствующий оценке высоты ВС
где δR - разрешение зондирующего сигнала по дальности;
Определяют дисперсии шума  и сигнала с шумом
и сигнала с шумом  в каждом разрешаемом элементе кадра ДДП для каждого из М ДДП
в каждом разрешаемом элементе кадра ДДП для каждого из М ДДП  исходя из предположения о положении скачка мощности сигнала на дальности n=n(kF)
исходя из предположения о положении скачка мощности сигнала на дальности n=n(kF)

Вычисляют логарифм функционала правдоподобия  принятой огибающей амплитуды отраженного сигнала z на частоте kF для гипотезы (n, kF) положения скачка мощности на дальности n при доплеровской частоте kF для каждого из М сформированных ДДП
принятой огибающей амплитуды отраженного сигнала z на частоте kF для гипотезы (n, kF) положения скачка мощности на дальности n при доплеровской частоте kF для каждого из М сформированных ДДП 

Находят положение скачка дисперсии сигнала по наблюдаемому ДДП nR(kF) по гипотезе, дающей максимум логарифма функционала правдоподобия 
Формируют нулевые матрицы Am для каждого из М кадров ДДП из K строк и N столбцов, где индекс строки равен индексу канала дальности n, индекс столбца равен индексу доплеровского фильтра kF;
Производят замену значения элемента матрицы Am с координатами (nR, kF)m, соответствующему положению скачка дисперсии сигнала кадра ДДП на дальности n, на «1»;
Производят замену значений элементов матрицы Am, у которых координата дальности 
Формируют результирующую кривую максимального контраста наблюдаемого ДДП nRΣ(kF) в последовательности:
Выдвигают гипотезы  о скачках мощности сигнала ДДП в каждом канале дальности n на доплеровских частотах kF1(n, l) и kF2(n, l)),
о скачках мощности сигнала ДДП в каждом канале дальности n на доплеровских частотах kF1(n, l) и kF2(n, l)),
Вычисляют дисперсии шума  и сигнала с шумом
и сигнала с шумом  для каждой гипотезы 1
для каждой гипотезы 1
Вычисляют логарифм функции правдоподобия  принятой огибающей амплитуды отраженного сигнала
принятой огибающей амплитуды отраженного сигнала  в канале дальности n для гипотезы l о положения скачка мощности на частотах kF1(n, l) и kF2(n, l)) для каждого из М сформированных ДДП
в канале дальности n для гипотезы l о положения скачка мощности на частотах kF1(n, l) и kF2(n, l)) для каждого из М сформированных ДДП

Данное выражение получено в приложении 1.
На фиг. 1 представлен вид сечения логарифма функции правдоподобия  в зависимости от индексов доплеровского фильтра kF1 и kF2 для одного канала дальности.
в зависимости от индексов доплеровского фильтра kF1 и kF2 для одного канала дальности.
Находят положение nR(kF1) и nR(kF2) скачков дисперсии сигнала на кривой максимального контраста ДДП по гипотезам, дающим максимум логарифма функционала правдоподобия 
Формируют нулевую матрицу Bm для каждого из М кадров ДДП из K строк и N столбцов, где индекс строки равен индексу канала дальности n, индекс столбца равен индексу доплеровского фильтра kF;
Производят замену значения элемента матрицы Bm с координатами (nR, kF)m, на «1» на частотах kF1, kF2;
Формируют матрицу С
Для каждого элемента С с координатами (nR, kF) формируют квадратную матрицу Gj размером 3x3, j=1…nRkF

Рассчитывают сумму всех элементов Gj, если сумма равна 1, заменяют значение  на "0";
на "0";
Определяют дальность ВС до точек кривой максимального контраста наблюдаемого ДДП nRΣ(kF) по координатам ненулевых элементов матрицы С;
Формируют вектор  описывающий кривую максимального контраста наблюдаемого ДДП
описывающий кривую максимального контраста наблюдаемого ДДП

На фиг 2 в качестве примера представлена результирующая кривая максимального контраста nRΣ(kF), полученная в результате полунатурного моделирования полета ВС со следующими параметрами: Н=109 м, Vв=0.1 м/с, Vп=41 м/с.
Формируют гипотезу о векторе состояния ВС Xi=[Нi, Vпi, Vвi]T, где Hi,Vпi,Vвi - высота, путевая и вертикальные скорости ВС для i - той гипотезы. Для исходной гипотезы (i=0) значение высоты Н0 берется равным  в качестве значений путевой Vп0 и вертикальной VB0 составляющих скорости ВС берутся соответствующие центральные значения априорно известных окон;
в качестве значений путевой Vп0 и вертикальной VB0 составляющих скорости ВС берутся соответствующие центральные значения априорно известных окон;
Рассчитывают для гипотезы вектора состояния ВС  дальности ВС до точек кривой максимального контраста Ri(kF, Xi).
дальности ВС до точек кривой максимального контраста Ri(kF, Xi).
Значения Ri берутся в диапазоне от первичной оценки канала высоты  до положения максимально удаленной точки ДДП (nR, kF), амплитуда которой превышает порог обнаружения.
до положения максимально удаленной точки ДДП (nR, kF), амплитуда которой превышает порог обнаружения.
Формируют вектор кривой максимального контраста для i-той гипотезы

Находят матрицу-якобиан Di(kF, Xi) размерностью N x 3 для каждого канала частоты kF преобразованием координат вектора Ri(kF, Xi):

Находят оптимальную оценку ошибки ΔXi вектора Хi относительно истинного значения:


где Di=Di(kF, Xi),
ϕ - корреляционная матрица шумов измерения дальностей Ri(kF) размерностью N x N,
Формируют новую (i+1) гипотезу оценки вектора состояния ВС
Повторяют итерации уточнения вектора оцениваемых параметров Xi до снижения вектора ошибки ΔXi до допустимых значений, переходят в режим слежения, выдают потребителю оценки высоты, путевой и вертикальной скорости  в режиме слежения.
в режиме слежения.
Для определения эффективности предлагаемого способа было проведено математическое и полунатурное моделирование алгоритма оценки высоты, путевой и вертикальной скорости воздушного судна для способа-прототипа и заявляемого способа с использованием экспериментальных данных.
На фиг. 3 представлены характерные ДДП, полученные в ходе летного эксперимента и полунатурного моделирования при полете воздушного судна над степью и водной поверхностью. ДДП водной поверхности имеет высокий некомпенсированный уровень боковых лепестков.
На фиг. 4 представлена зависимость СКО оценок высоты, путевой и вертикальной скорости воздушного судна для предлагаемого способа (кривая 2) и способа-прототипа (кривая 1). Систематическая составляющая ошибки оценок Н, Vп, Vв, для заявляемого способа значительно ниже по сравнению со способом-прототипом. Так, например, для поверхности типа «степь» ΔНсист=5 м, ΔVп сист=2 м/c, ΔVв сист=0 м/с для способа-прототипа, для заявляемого способа - ΔНсист - 1 м, ΔVп сист=0 м/с, ΔVв сист=0 м/с; для поверхности типа «вода» » величина ошибки для заявляемого способа практически не изменяется, для способа-прототипа вследствие наличия высокого уровня боковых лепестков кривой максимального контраста на ДДП выделяется со значительными ошибками, что вызывает срыв работы алгоритма оценки высотно-скоростных параметров ВС.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений в способах однолучевого измерения высоты Н, путевой Vп и вертикальной Vв скорости воздушного судна неизвестно:
- нахождение кривой максимального контраста nRΣ(kF) по гипотезам, дающим максимум логарифма функции правдоподобия  о соответствии принятой огибающей амплитуды отраженного сигнала z гипотезе (n, kF1, kF2) положения скачка мощности на частотах kF1, kF2 в канале дальности n;
о соответствии принятой огибающей амплитуды отраженного сигнала z гипотезе (n, kF1, kF2) положения скачка мощности на частотах kF1, kF2 в канале дальности n;
- получение усредненной кривой максимального контраста nRΣ(kF) на основе некогерентного суммирования кривых максимального контраста ДДП  на М последовательных тактах;
на М последовательных тактах;
- исключение из результирующей кривой максимального контраста nRΣ(kF) отсчетов, которые по координате дальности или частоты не имеют ни одного соседнего отсчета.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что дополнительный учет на кривой максимального контраста наблюдаемого ДДП отсчетов скачка мощности эхо-сигнала, полученных в сечениях каналов дальности n, некогерентное суммирование кривых максимального контраста нескольких ДДП и исключение из результирующей кривой максимального контраста отсчетов, которые не имеют соседних отсчетов приведет к повышению точности и устойчивости однолучевого измерения высоты, путевой и вертикальной скорости ВС над различными видами поверхности.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электронной и радиотехники.
ПРИЛОЖЕНИЕ 1
Функционал правдоподобия
Плотность вероятности отсчета для произвольного канала дальности как произведение нормальных законов распределения отсчетов его квадратур определяется выражением [4]
где  - синусная и косинусная квадратура (n, kF) отсчета сигнала,
- синусная и косинусная квадратура (n, kF) отсчета сигнала,
 - дисперсия принятого сигнала в канале дальности n;
- дисперсия принятого сигнала в канале дальности n;
 - комплексная амплитуда сигнала, отраженного (n, kF) элементом ДДП.
- комплексная амплитуда сигнала, отраженного (n, kF) элементом ДДП.
Совместная плотность вероятности выборок сигнала согласованного фильтра  и следовательно логарифм функционала правдоподобия
и следовательно логарифм функционала правдоподобия  в канале дальности n равны
в канале дальности n равны


где  - дисперсия шума;
- дисперсия шума;
 - дисперсия сигнала с шумом;
- дисперсия сигнала с шумом;
kF1, kF2 - индексы доплеровских фильтров, в которых наблюдаются скачки дисперсии принятого сигнала в выбранном канале дальности п.
Максимум логарифма функционала правдоподобия (3) соответствует оценке индексов kF1 и kF2 отраженного сигнала и находится через решение системы уравнений

Решение системы уравнений (4) имеет вид:

После подстановки (5) в (3) получим
где СНИ - постоянный коэффициент.
Учитывая только составляющие, влияющие на положение максимума логарифма функционала правдоподобия, получим окончательное выражение

Литература:
1. Макрушин А.П., Пилипенко А.И., Мухин В.В., Фролов А.Ю., Янковский В.Т., Колтышев Е.Е. Определение значений путевой и вертикальной составляющих скорости полета носителя по сигналам когерентного радиовысотомера // Сборник трудов по материалам IV Всероссийской НПК «Радиовысотометрия 2013». Каменск-Уральский: УПКБ «Деталь», 2014. С. 92-96.
2. Патент России №2498344. Корреляционный измеритель высоты и составляющих вектора путевой скорости.
3. Патент России №2551896. Способ однолучевого измерения высоты и составляющих скорости летательного аппарата и устройство радиовысотомера, реализующего способ.
4. Тихонов В.И. Статистическая радиотехника. М: Советское радио, 1966. 681 с.
5 Траекторная обработка. Принципы, способы и алгоритмы: в 2 ч./ Я. Бар-Шалом, X.Р. Ли; [пер. с англ. Д.Д. Дмитриева]. - М.: МГТУ им Н.Э. Баумана, 2011.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство измерения высоты и составляющих скорости по сигналам двухканального когерентного радиовысотомера | 2024 |
|
RU2832999C1 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550081C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ, ИСТИННОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И НАКЛОНА ВЕКТОРА СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ГОРИЗОНТА, УСТРОЙСТВО БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, ИСПОЛЬЗУЮЩЕЕ СПОСОБ | 2016 |
|
RU2643168C2 |
| СПОСОБ ОЦЕНКИ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ АЭРОДИНАМИЧЕСКОЙ ЦЕЛИ | 2021 |
|
RU2773818C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И РАДИОВЫСОТОМЕР С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩИЙ СПОСОБ | 2013 |
|
RU2552515C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И УСТРОЙСТВО РАДИОВЫСОТОМЕРА С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550082C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И РАДИОВЫСОТОМЕР С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩИЙ СПОСОБ | 2013 |
|
RU2555865C2 |
| Способ распознавания типа воздушного объекта по турбинному эффекту | 2022 |
|
RU2790143C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИЗМЕРЕНИЯМ ИХ НЕСУЩЕЙ ЧАСТОТЫ | 2021 |
|
RU2776078C1 |

Изобретение относится к радионавигации и может быть использовано для измерения высоты и составляющих скорости воздушного судна (ВС) в радиовысотомерах (РВ) воздушных судов, в том числе и в РВ беспилотных летательных аппаратов. Техническим результатом изобретения является повышение точности и устойчивости однолучевого измерения высоты, путевой и вертикальной скорости ВС над различными видами поверхности. В заявленном способе осуществляют этапы вертикального зондирования земной поверхности, когерентного однолучевого приема отраженного сигнала, нахождения на дальностно-доплеровском портрете (ДДП) кривой максимального контраста nR(kF) двумя независимыми способами по дальности nR и частоте kF, их суммирования с получением результирующей кривой максимального контраста nRΣ(kF); некогерентного суммирования кривых максимального контраста нескольких ДДП и морфологической обработки результирующей кривой максимального контраста с отбрасыванием ложных отсчетов, нахождения оптимальной текущей оценки вектора состояния Xi=(Hi, Vпi, Vвi)T, i - индекс гипотезы о текущей Нi - высоте, Vпi - путевой скорости и Vвi - вертикальной скорости ВС. Оптимальная оценка вектора состояния Xi находится через нелинейную фильтрацию невязки прогнозируемой гипотезы о дальности ВС до кривой максимального контраста Ri(kF, Xi) относительно дальности ВС до результирующей кривой максимального контраста наблюдаемого ДДП nRΣ(kF). При нахождении nRΣ(kF) не учитывают отсчеты кривой максимального контраста, полученные при нахождении положения скачка мощности отраженного сигнала в диапазоне дальностей от  до
до  где - минимальная дальность до разрешаемых элементов ДДП, мощность отраженного сигнала от которых превышает порог обнаружения, δR - разрешение зондирующего сигнала по дальности. 1 пр., 4 ил.
где - минимальная дальность до разрешаемых элементов ДДП, мощность отраженного сигнала от которых превышает порог обнаружения, δR - разрешение зондирующего сигнала по дальности. 1 пр., 4 ил.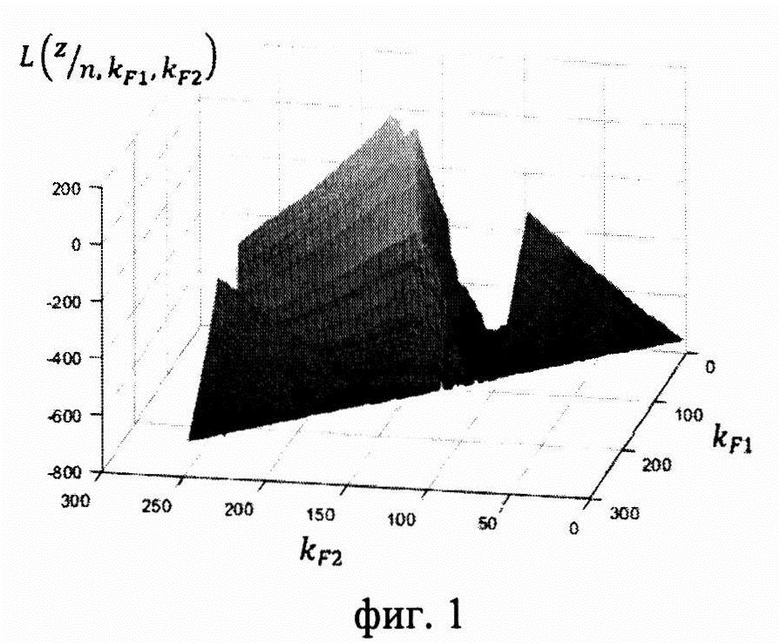
Способ однолучевого определения высотно-скоростных параметров воздушного судна по сигналам когерентного радиовысотомера, включающий вертикальное излучение зондирующего сигнала через широко направленную антенну радиовысотомера (РВ), когерентный прием эхо-сигнала и получение двумерного дальность-доплеровского портрета (ДДП) облучаемой местности  получение первичной оценки высоты ВС (воздушного судна)
получение первичной оценки высоты ВС (воздушного судна)  как минимальной, усредненной по нескольким измерениям дальности до разрешаемых элементов ДДП, мощность отраженного сигнала от которых превышает порог обнаружения, определение номера канала дальности, соответствующего оценке высоты ВС
как минимальной, усредненной по нескольким измерениям дальности до разрешаемых элементов ДДП, мощность отраженного сигнала от которых превышает порог обнаружения, определение номера канала дальности, соответствующего оценке высоты ВС
где δR - разрешение зондирующего сигнала по дальности, определение дисперсии шума  и сигнала с шумом
и сигнала с шумом  в каждом разрешаемом элементе кадра ДДП, исходя из гипотезы о положении скачка мощности сигнала на дальности n=n(kF)
в каждом разрешаемом элементе кадра ДДП, исходя из гипотезы о положении скачка мощности сигнала на дальности n=n(kF)

где K - длина реализации отселектированного участка ДДП по дальности, выраженная в числе разрешаемых элементов δR, вычисление логарифма функционала правдоподобия  принятой огибающей амплитуды отраженного сигнала z на частоте kF для гипотезы (n, kF) положения скачка мощности на дальности n при доплеровской частоте kF для каждого сформированного ДДП
принятой огибающей амплитуды отраженного сигнала z на частоте kF для гипотезы (n, kF) положения скачка мощности на дальности n при доплеровской частоте kF для каждого сформированного ДДП 

нахождение положения скачка дисперсии сигнала на кривой максимального контраста по наблюдаемому ДДП nR(kF) по гипотезе, дающей максимум логарифма функционала правдоподобия  формирование вектора
формирование вектора  описывающего кривую максимального контраста наблюдаемого ДДП, формирование гипотез о векторе состояния ВС Xi=[Hi, Vпi, Vвi]T, где Hi, Vпi, VBi - высота, путевая и вертикальные скорости ВС для i-той гипотезы, для исходной гипотезы (i=0) значение высоты H0 берется равным
описывающего кривую максимального контраста наблюдаемого ДДП, формирование гипотез о векторе состояния ВС Xi=[Hi, Vпi, Vвi]T, где Hi, Vпi, VBi - высота, путевая и вертикальные скорости ВС для i-той гипотезы, для исходной гипотезы (i=0) значение высоты H0 берется равным  в качестве значений путевой Vп0 и вертикальной VB0 составляющих скорости ВС берутся соответствующие центральные значения априорно известных окон, вычисление для гипотезы вектора состояния ВС Xi=[Нi, Vпi, Vвi]T дальностей ВС до точек кривой максимального контраста Ri(kF, Xi)
в качестве значений путевой Vп0 и вертикальной VB0 составляющих скорости ВС берутся соответствующие центральные значения априорно известных окон, вычисление для гипотезы вектора состояния ВС Xi=[Нi, Vпi, Vвi]T дальностей ВС до точек кривой максимального контраста Ri(kF, Xi)
в расчетах Ri берут точки кривой максимального контраста, находящиеся в диапазоне дальностей от первичной оценки канала высоты  до положения максимально удаленной точки ДДП (nR, kF), амплитуда которой превышает порог обнаружения, формирование вектора кривой максимального контраста для i-той гипотезы
до положения максимально удаленной точки ДДП (nR, kF), амплитуда которой превышает порог обнаружения, формирование вектора кривой максимального контраста для i-той гипотезы

вычисление матрицы-якобиана Di(kF, Xi) i-той гипотезы преобразованием вектора  размером N x 3 для каждого канала частоты kF
размером N x 3 для каждого канала частоты kF
вычисление оптимальной оценки ошибки ΔXi вектор-гипотезы Xi относительно истинного значения
где Di=Di(kF, Xi),
ϕ - корреляционная матрица шумов измерения дальностей Ri(kF) размерностью N x N,
 - вектор, описывающий кривую максимального контраста наблюдаемого ДДП,
- вектор, описывающий кривую максимального контраста наблюдаемого ДДП,
формируют новую (i+1) гипотезу оценки вектора состояния ВС
Xi+1=Xi+ΔXi,
повторяют итерации уточнения вектора оцениваемых параметров Хi до снижения вектора ошибок ΔХi до допустимых значений, переходят в режим слежения, выдают потребителю оценки высоты, путевой и вертикальной скорости  в режиме слежения, отличающийся тем, что сеанс измерения дополнительно включает получение М последовательных ДДП
в режиме слежения, отличающийся тем, что сеанс измерения дополнительно включает получение М последовательных ДДП  для каждого из которых находят положения скачков дисперсии сигнала (nR, kF)m, формирование вектора
для каждого из которых находят положения скачков дисперсии сигнала (nR, kF)m, формирование вектора  описывающего кривую максимального контраста наблюдаемого ДДП, производят через процедуру, включающую создание нулевых матриц Аm для каждого из М кадров ДДП из K строк и N столбцов, где индекс строки равен индексу канала дальности n, индекс столбца равен индексу доплеровского фильтра kF, замену значения элемента матрицы Аm с координатами (nR, kF)m, соответствующим положению скачка дисперсии сигнала кадра ДДП на дальности n, на «1»; замену значений элементов матрицы Аm, у которых координата дальности
описывающего кривую максимального контраста наблюдаемого ДДП, производят через процедуру, включающую создание нулевых матриц Аm для каждого из М кадров ДДП из K строк и N столбцов, где индекс строки равен индексу канала дальности n, индекс столбца равен индексу доплеровского фильтра kF, замену значения элемента матрицы Аm с координатами (nR, kF)m, соответствующим положению скачка дисперсии сигнала кадра ДДП на дальности n, на «1»; замену значений элементов матрицы Аm, у которых координата дальности  на «0», формирование результирующей кривой максимального контраста наблюдаемого ДДП nRΣ(kF) в последовательности:
на «0», формирование результирующей кривой максимального контраста наблюдаемого ДДП nRΣ(kF) в последовательности:
выдвигают гипотезы  о скачках мощности сигнала ДДП на доплеровских частотах kF1(n, l) и kF2(n, l)); вычисляют дисперсии шума
о скачках мощности сигнала ДДП на доплеровских частотах kF1(n, l) и kF2(n, l)); вычисляют дисперсии шума  и сигнала с шумом
и сигнала с шумом 
вычисляют логарифм функции правдоподобия  о соответствии принятой огибающей амплитуды отраженного сигнала z гипотезе (n, kF1, kF2) положения скачка мощности на частотах kF1, kF2 в канале дальности n для каждого из М сформированных ДДП
о соответствии принятой огибающей амплитуды отраженного сигнала z гипотезе (n, kF1, kF2) положения скачка мощности на частотах kF1, kF2 в канале дальности n для каждого из М сформированных ДДП 

находят положения kF1(nR) и kF2(nR) скачков дисперсии сигнала на кривой максимального контраста ДДП по гипотезам, дающим максимум логарифма функционала правдоподобия  формируют нулевые матрицы Вm для каждого из М кадров ДДП из K строк и N столбцов, где индекс строки равен индексу канала дальности n, индекс столбца равен индексу доплеровского фильтра kF; заменяют значения элементов матрицы Вm с координатами скачков (nR, kF)m на «1» на частотах kF1, kF2; вычисляют матрицу С
формируют нулевые матрицы Вm для каждого из М кадров ДДП из K строк и N столбцов, где индекс строки равен индексу канала дальности n, индекс столбца равен индексу доплеровского фильтра kF; заменяют значения элементов матрицы Вm с координатами скачков (nR, kF)m на «1» на частотах kF1, kF2; вычисляют матрицу С
для каждого элемента матрицы С с координатами (nR, kF) формируют квадратную матрицу Gj размером 3x3, j=1…nRkF
рассчитывают сумму всех элементов Gj, если сумма равна 1, значение  заменяют «0», определяют дальность ВС до точек кривой максимального контраста наблюдаемого ДДП nRΣ(kF) по координатам ненулевых элементов матрицы С, формируют вектор
заменяют «0», определяют дальность ВС до точек кривой максимального контраста наблюдаемого ДДП nRΣ(kF) по координатам ненулевых элементов матрицы С, формируют вектор  описывающий кривую максимального контраста наблюдаемого ДДП
описывающий кривую максимального контраста наблюдаемого ДДП

| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| КОРРЕЛЯЦИОННЫЙ ИЗМЕРИТЕЛЬ ВЫСОТЫ И СОСТАВЛЯЮЩИХ ВЕКТОРА ПУТЕВОЙ СКОРОСТИ | 2012 |
|
RU2498344C2 |
| СПОСОБ ОЦЕНКИ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2499279C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННОМУ ИЗОБРАЖЕНИЮ | 2017 |
|
RU2656366C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ ОБЪЕКТОВ ПРИ ФОРМИРОВАНИИ ИЗОБРАЖЕНИЯ ОБЪЕКТОВ НА ПОВЕРХНОСТИ С ПОМОЩЬЮ БОРТОВОЙ РЛС | 2006 |
|
RU2316022C1 |
| EP 3054316 B1, 14.11.2018 | |||
| US 2010302088 A1, 02.12.2010 | |||
| US 2003214431 A1, 20.11.2003. | |||

