Данное изобретение относится к удерживающему и позиционирующему устройству хирургического инструмента и к хирургической роботизированной системе или же телеманипулятору для минимально-инвазивной хирургии и, прежде всего, лапароскопии.
Роботизированные системы или также телеманипуляторы для минимально-инвазивной хирургии, прежде всего для лапароскопической хирургии, заменяют посредством моторизованного позиционирования, как правило, приводимые в действие вручную хирургами операционные инструменты, такие как, например, хирургические инструменты, эндоскоп или же камера. Применяемые операционные инструменты вводят во внутренние части пациента посредством одного или же нескольких троакаров. Троакаром называют инструмент, с помощью которого хирург создает при минимально-инвазивной хирургии доступ к полости тела пациента (как правило, брюшной полости или грудной полости), причем доступ поддерживается открытым через трубу, так называемый тубус. Предусмотренные в роботизированной системе крепление механика перемещения и управляющая логика делают возможным перемещение операционных инструментов вокруг точки вращения с двумя степенями свободы (х, y), а также линейное перемещение операционных инструментов вдоль оси (z) инструментов. Точкой вращения называют постоянную точку перемещения с двумя степенями свободы (х, y). Эта точка вращения, наиболее предпочтительно, располагается в точке пересечения троакара с брюшной стенкой пациента. Управляющая логика роботизированной системы должна знать точку вращения или же точка вращения должна быть задана посредством конструктивного выполнения механики перемещения для ограничения перемещения операционного инструмента таким образом, что биомеханическая нагрузка на ткань в окрестности троакара является, по возможности, малой.
Известные из уровня техники роботизированные системы основаны на механических руках с активным перемещением операционного инструмента, которые нуждаются, с одной стороны, в большом монтажном пространстве, причем вследствие типичных вариантов осуществления столкновения механических рук в ходе последовательности движений в целом едва могут быть предотвращены.
Во время минимально-инвазивного хирургического вмешательства применяют по меньшей мере два хирургических инструмента, как правило от трех до четырех хирургических инструментов, таких как захват, ножницы, иглодержатель, рассекатель, а также камеру или же эндоскоп, которые вводят в каждом случае через отдельный троакар во внутренние части тела пациента. Это означает, что для каждого примененного операционного инструмента имеется в наличии механическая рука, которая управляет позиционированием и активным перемещением инструмента.
Недостаток решений из уровня техники состоит в том, что вследствие громоздкой конструкции возможность позиционирования инструментов ограничена, и возможен только ограниченный доступ к пациенту операционного персонала, например ассистирующего врача и операционной сестры.
Другой недостаток состоит в том, что постоянная точка в известных системах задана посредством механической связи между троакаром и механической рукой всегда в обязательном порядке.
Поэтому, целью данного изобретения является создание механической руки для позиционирования хирургического инструмента, а также хирургической роботизированной системы, которая или же которые предусматривают высокую вариативность и нуждаются лишь в незначительном монтажном пространстве или же являются более компактными и легкими по конструкции, а также при этом делают избирательным образом возможной механическую связь троакара с механической рукой или же также выходят из этой механической связи троакара с механической рукой.
Следующая цель данного изобретения состоит в предоставлении роботизированной системы, которая предлагает наибольший диапазон регулировки предварительного позиционирования для устройства крепления механической руки. При применении двух или более устройств крепления для механических рук являются возможными более универсальными возможности позиционирования в аспекте взаимного расположения.
Эти цели достигнуты в данном изобретении согласно признакам п. 1 формулы изобретения посредством удерживающего и позиционирующего устройства хирургического инструмента и/или эндоскопа для минимально-инвазивной хирургии, прежде всего для применения в рамках хирургической роботизированной системы, которое содержит первую ось вращения, вокруг которой с возможностью вращения расположен удерживающий элемент, причем первая ось вращения постоянно пересекается с продольной осью по меньшей мере одного хирургического инструмента и/или эндоскопа в точке вращения посредством того, что в удерживающем элементе размещен линейный привод, который располагает узел привода инструмента с возможностью вращения вокруг точки вращения, и причем на узле привода инструмента предусмотрено телескопическое устройство, посредством которого хирургический инструмент и/или эндоскоп является линейно подвижным вдоль его продольной оси посредством направляющего устройства в тело таким образом, что продольная ось хирургического инструмента и/или эндоскопа является варьируемо регулируемой относительно телескопического устройства.
Кроме того, цель достигнута данным изобретением согласно признакам п. 11 формулы изобретения посредством хирургической роботизированной системы с несколькими механическими руками, на которой может быть размещен по меньшей мере один хирургический инструмент и/или эндоскоп для минимально-инвазивной хирургии, а по меньшей мере два удерживающих и позиционирующих устройства размещены на проходящей по существу поперечно удерживающему и позиционирующему устройству крепежно-несущей системе, причем крепежно-несущая система выполнена соответственно из присоединительной площадки для каждого удерживающего и позиционирующего устройства, и причем присоединительные площадки соединены друг с другом соответственно жестко или посредством шарниров.
Другие выгодные варианты осуществления изобретения, а также хирургической роботизированной системы согласно изобретению получаются из дополнительных пунктов формулы изобретения аналогично к механической руке для активного позиционирования хирургического инструмента. Это реализовано, прежде всего, за счет того, что механическая рука для активного позиционирования хирургического инструмента согласно изобретению может быть скомбинирована с роботизированной системой или же может дополнять ее. Соответствующие изобретению понятия «Роботизированная система» и «Телеманипулятор» могут применяться синонимически.
Является выгодным, когда узел привода инструмента установлен с возможностью вращения на телескопическом устройстве посредством точки поворота инструмента таким образом, что телескопическая продольная ось телескопического устройства является варьируемой относительно продольной оси хирургического инструмента и/или эндоскопа в зависимости от линейного привода 5.
Другой вариант осуществления изобретения выполнен таким образом, что телескопическое устройство имеет несколько телескопических элементов, причем точка поворота инструмента расположена на том телескопическом элементе, который имеет наибольший диапазон перемещения.
Согласно предпочтительному варианту осуществления направляющее устройство имеет по меньшей мере одну инструментальную направляющую, через которую простирается шток хирургического инструмента и/или эндоскопа. Особое преимущество состоит в том, что линейный привод размещен на телескопическом устройстве посредством точки крепления линейного привода таким образом, что вращательное перемещение узла привода инструмента вокруг точки вращения получается за счет того, что соединительное устройство имеет соединительную точку поворота, которая жестко соединена с удерживающим элементом. Вращение узла привода инструмента с инструментами и/или с эндоскопом как вокруг точки вращения, так и вокруг соединительной точки поворота обеспечивает по существу постоянное расположение удерживающего элемента по отношению к точке вращения.
Согласно предпочтительному варианту осуществления удерживающее и позиционирующее устройство выполнено таким образом, что узел привода инструмента перемещает хирургический инструмент и/или эндоскоп с несколькими степенями свободы, причем управление узлом привода инструмента происходит через оператора по управляющим и питающим линиям, которые проведены насквозь через удерживающий элемент и линейный привод, посредством блока управления.
Первая ось вращения образуется, прежде всего, посредством того, что предусмотрен узел привода, который управляет хирургическим инструментом и/или эндоскопом, причем узел привода выполнен с возможностью закрепления на механической руке, и причем между узлом привода и удерживающим элементом предусмотрено шарнирное соединение.
Другой вариант осуществления выполнен таким образом, что на удерживающем элементе размещен соединительный элемент, который дистальным концом с возможностью вращения соединен в точке вращения с инструментальной направляющей. За счет этого точка вращения дополнительно механически задается по отношению к удерживающему элементу таким образом, что становится возможной дополнительная фиксация точки вращения.
Кроме того, данное изобретение может быть расширено посредством того, что несколько хирургических инструментов направляются насквозь через единственный троакар во внутреннюю часть тела, причем для каждого хирургического инструмента предусмотрен отдельный узел привода инструмента, и причем, прежде всего, хирургические инструменты выполнены в продольном направлении дугообразными.
Когда удерживающий элемент выполнен с возможностью приспособления в его исходном положении посредством устройства предварительного позиционирования, причем устройство предварительного позиционирования имеет один или несколько элементов предварительного позиционирования, которые являются предварительно устанавливаемыми в их положении посредством соответственно по меньшей мере одной оси вращения, причем, прежде всего, четыре элемента предварительного позиционирования являются предварительно устанавливаемыми в последовательно варьируемых по отношению друг к другу положениях, тогда удерживающее и позиционирующее устройство может быть предварительно установлено в требуемом положении.
Кроме того, хирургическая роботизированная система согласно изобретению может быть усовершенствована посредством того, что крепежно-несущая система посредством присоединителя консольных опор соединена с простирающимся по существу вертикально главным опорным устройством для опоры на неподвижную опору, которая может быть расположена подвижно или задана относительно закрепленного или перемещаемого операционного стола.
Согласно другому варианту осуществления изобретения хирургическая роботизированная система имеет центральный блок управления, который соединен с каждым из удерживающих и позиционирующих устройств с соответствующими хирургическими инструментами и/или эндоскопами и сопряжен с панелью управления для введения команд в форме управляющих данных оператора, которая предоставляет визуальные данные одного или нескольких эндоскопов посредством блока визуального отображения информации.
В добавление к этому, является выгодным, что блок управления и панель управления соединены с выполненным с возможностью перемещения операционным столом, причем как визуальные данные, так и управляющие данные обрабатываются в зависимости от заданных положений как удерживающего и позиционирующего устройства, так и операционного стола.
Данное изобретение представлено сугубо в качестве примера посредством приложенных чертежей. Показано на:
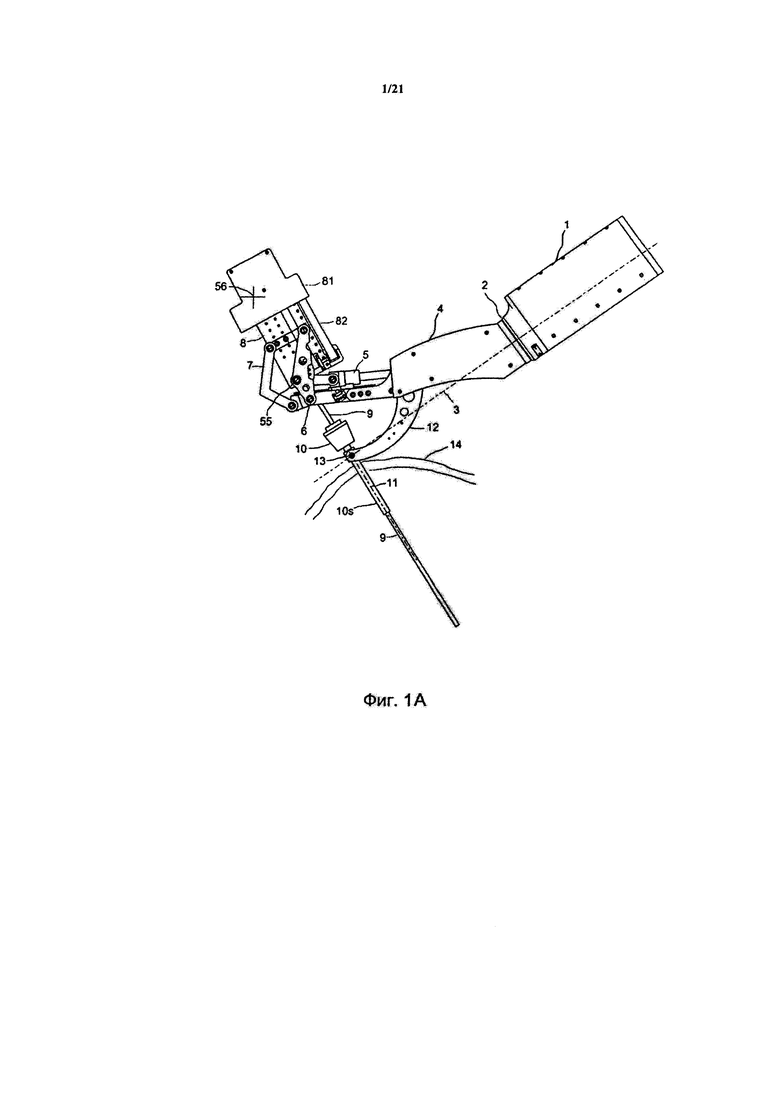
Фиг. 1А схематическое изображение механической руки согласно изобретению для активного позиционирования хирургического инструмента, который соединен посредством установленного с возможностью поворота узла привода с телескопической консолью, включая соединительный элемент между направляющим устройством для введения хирургического инструмента и конструктивным приспособлением для реализации второй оси вращения,
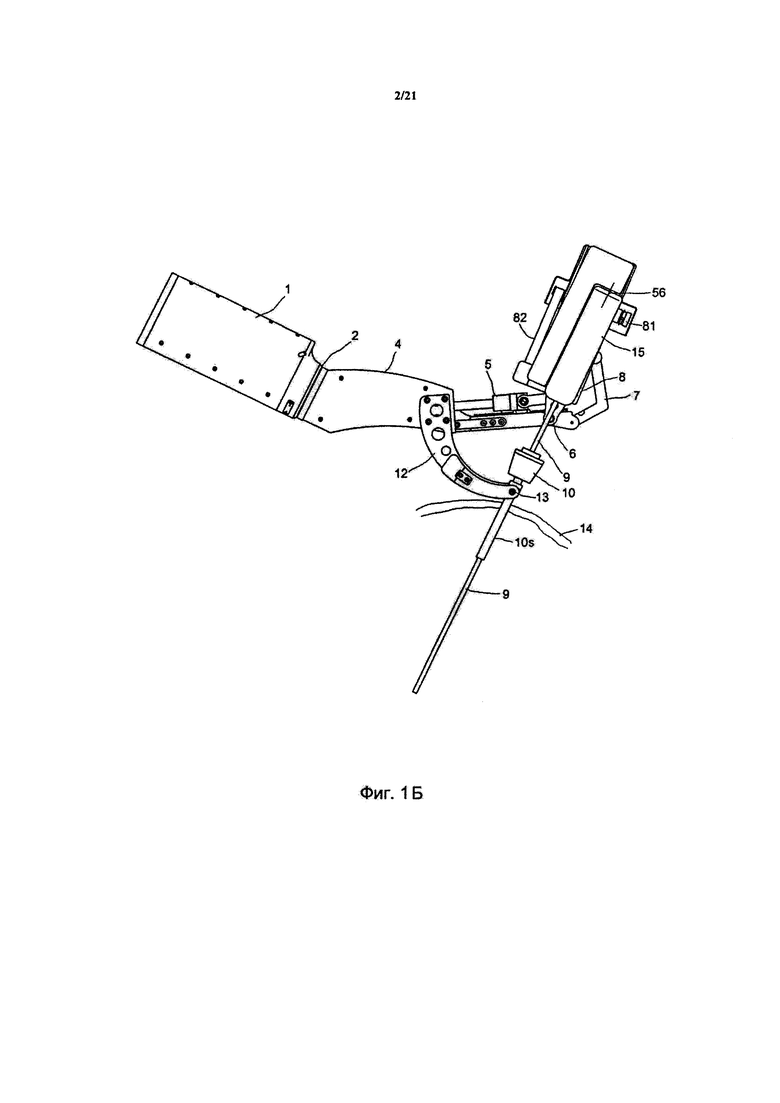
Фиг. 1Б схематическое изображение механической руки согласно изобретению для активного позиционирования хирургического инструмента, который соединен посредством установленного с возможностью поворота узла привода с телескопической консолью, включая соединительный элемент между направляющим устройством для введения хирургического инструмента и конструктивным приспособлением для реализации второй оси вращения,
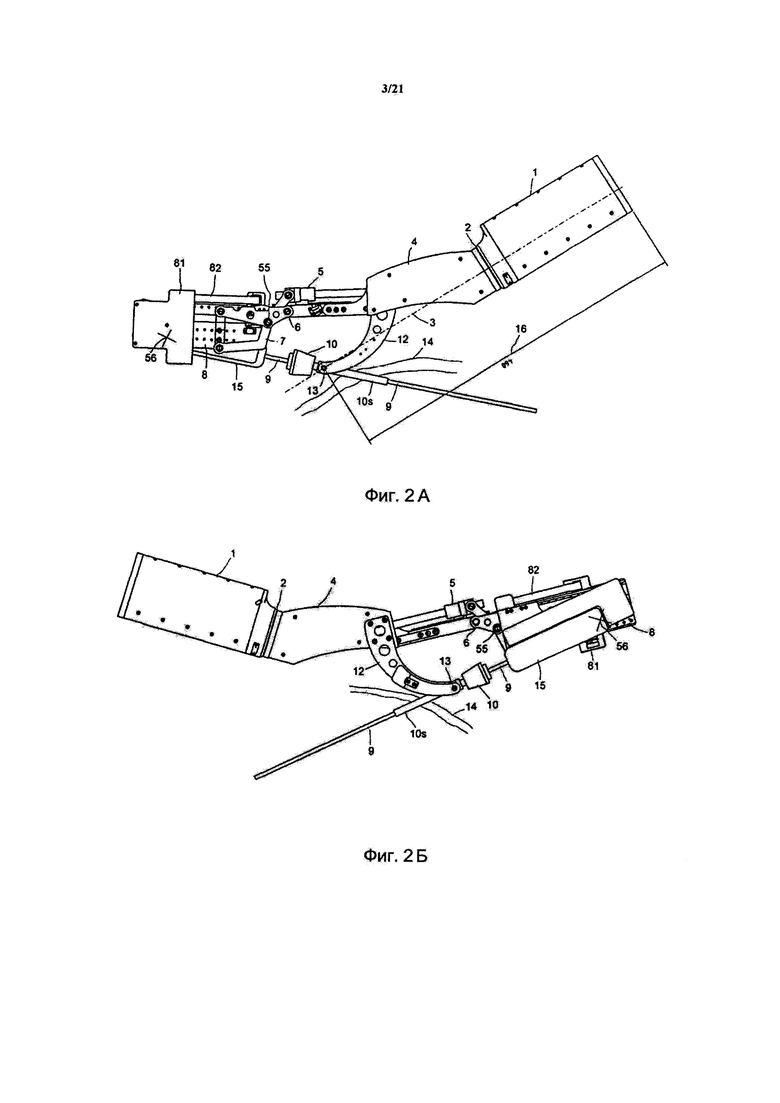
Фиг. 2А другое схематическое изображение механической руки согласно изобретению для активного позиционирования хирургического инструмента, который соединен посредством установленного с возможностью поворота узла привода с телескопической консолью, включая соединительный элемент между направляющим устройством для введения хирургического инструмента и конструктивным приспособлением для реализации второй оси вращения, на котором показано как толкающее перемещение производит вращательное перемещение посредством соединительного шарнира на второй оси вращения,
Фиг. 2Б другое схематическое изображение механической руки согласно изобретению для активного позиционирования хирургического инструмента, который соединен посредством установленного с возможностью поворота узла привода с телескопической консолью, включая соединительный элемент между направляющим устройством для введения хирургического инструмента и конструктивным приспособлением для реализации второй оси вращения, на котором показано как толкающее перемещение производит вращательное перемещение посредством соединительного шарнира на второй оси вращения,
Фиг. 3А схематическое изображение механической руки согласно изобретению для активного позиционирования хирургического инструмента, который соединен посредством установленного с возможностью поворота узла привода с телескопической консолью без соединительного элемента согласно фиг. 1А,
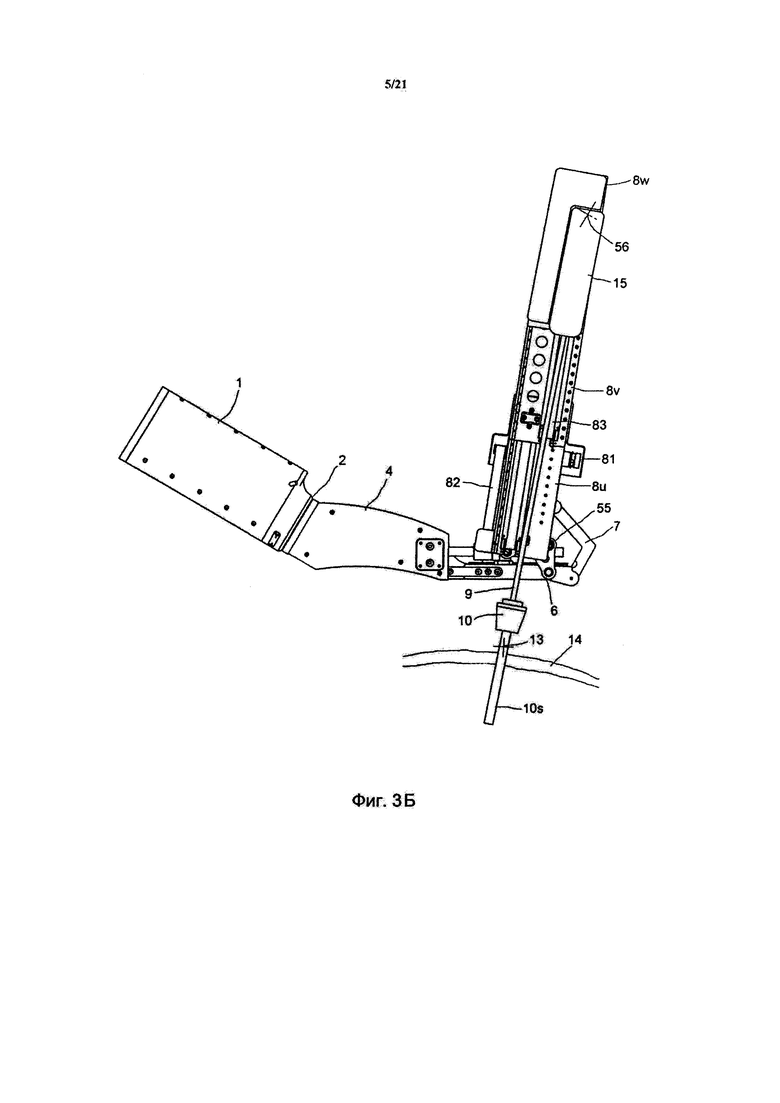
Фиг. 3Б схематическое изображение механической руки согласно изобретению для активного позиционирования хирургического инструмента, который соединен посредством установленного с возможностью поворота узла привода с телескопической консолью без соединительного элемента согласно фиг. 1Б,
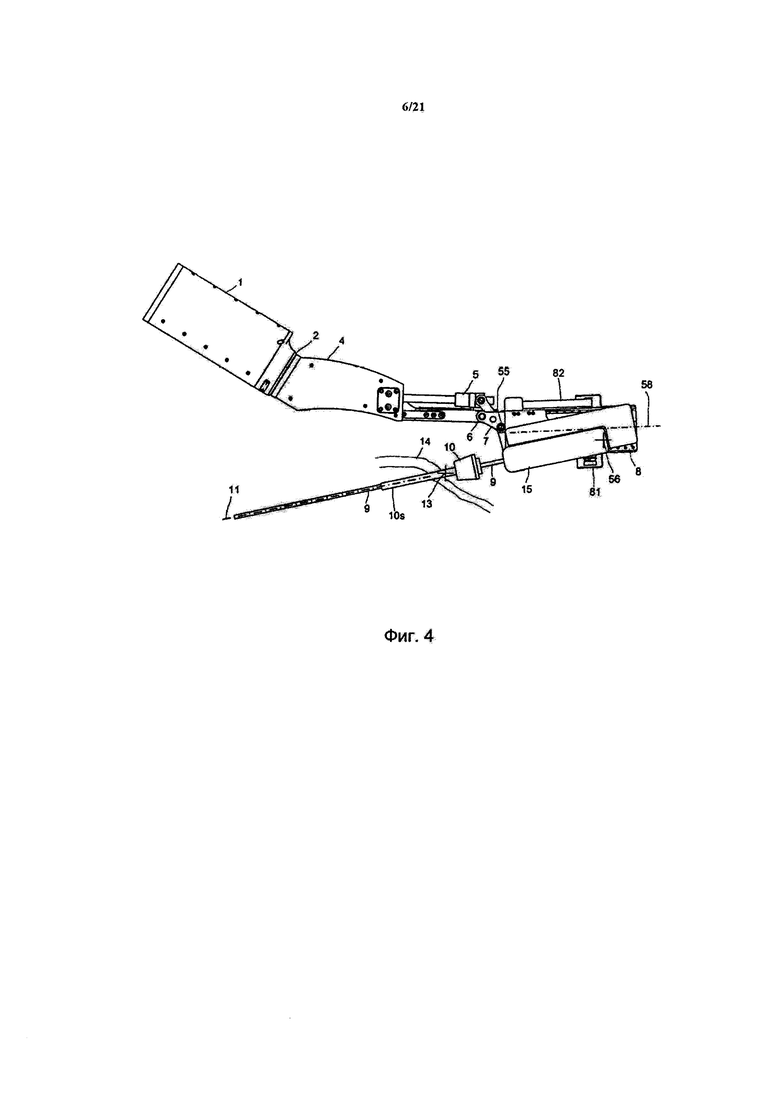
Фиг. 4 схематическое изображение механической руки согласно изобретению для активного позиционирования хирургического инструмента без соединительного элемента согласно фиг. 1, на котором показано как толкающее перемещение производит вращательное перемещение посредством соединительного шарнира на второй оси вращения, а также присоединение узла привода инструмента,
Фиг. 5А вид сверху на предлагаемую механическую руку для активного позиционирования хирургического инструмента в варианте осуществления с правой телескопической рукой,
Фиг. 5Б. вид сверху на предлагаемую механическую руку для активного позиционирования хирургического инструмента в варианте осуществления с левой телескопической рукой,
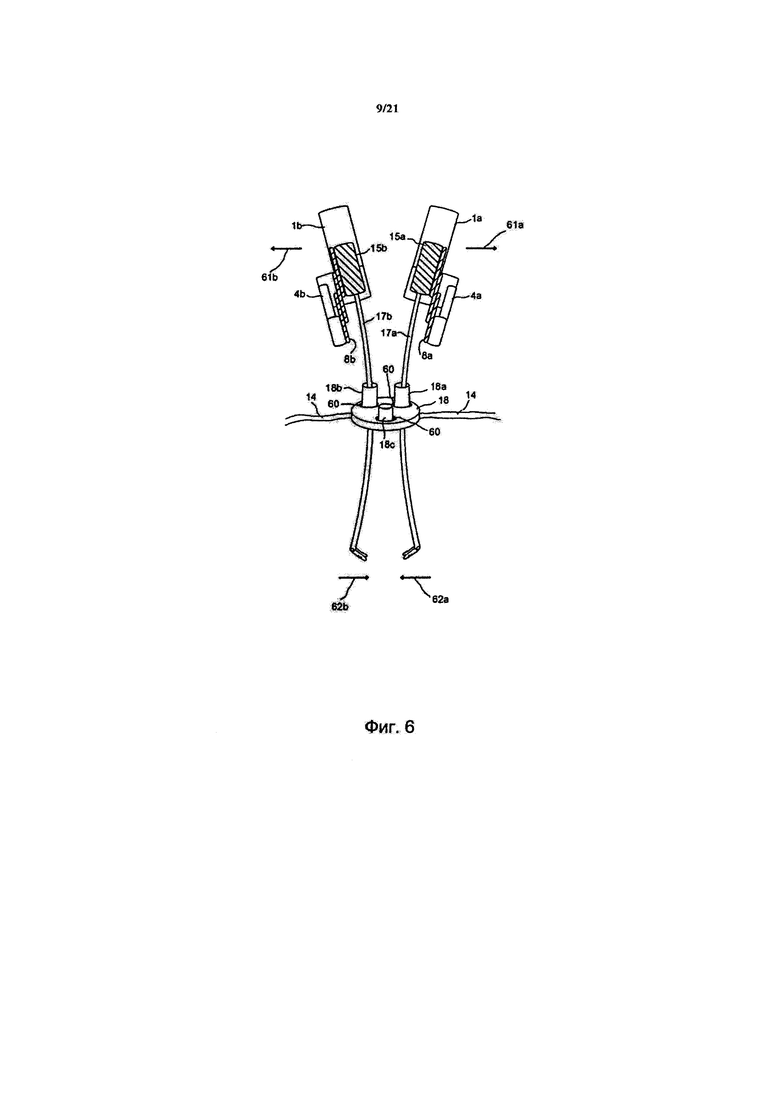
Фиг. 6 схематическое изображение механической руки согласно изобретению для активного позиционирования хирургического инструмента в вариантах осуществления с правой телескопической рукой и с левой телескопической рукой для совместного применения с троакаром с одиночным портом,
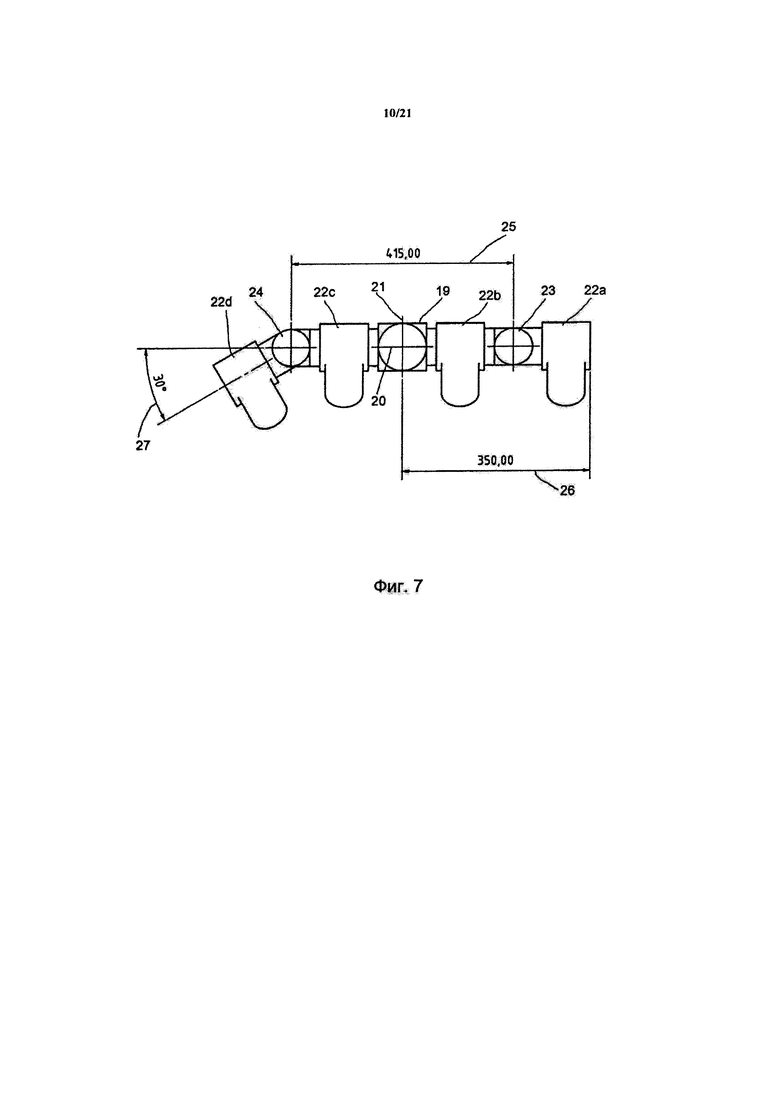
Фиг. 7 схематическое изображение универсально регулируемой несущей конструкции согласно изобретению,
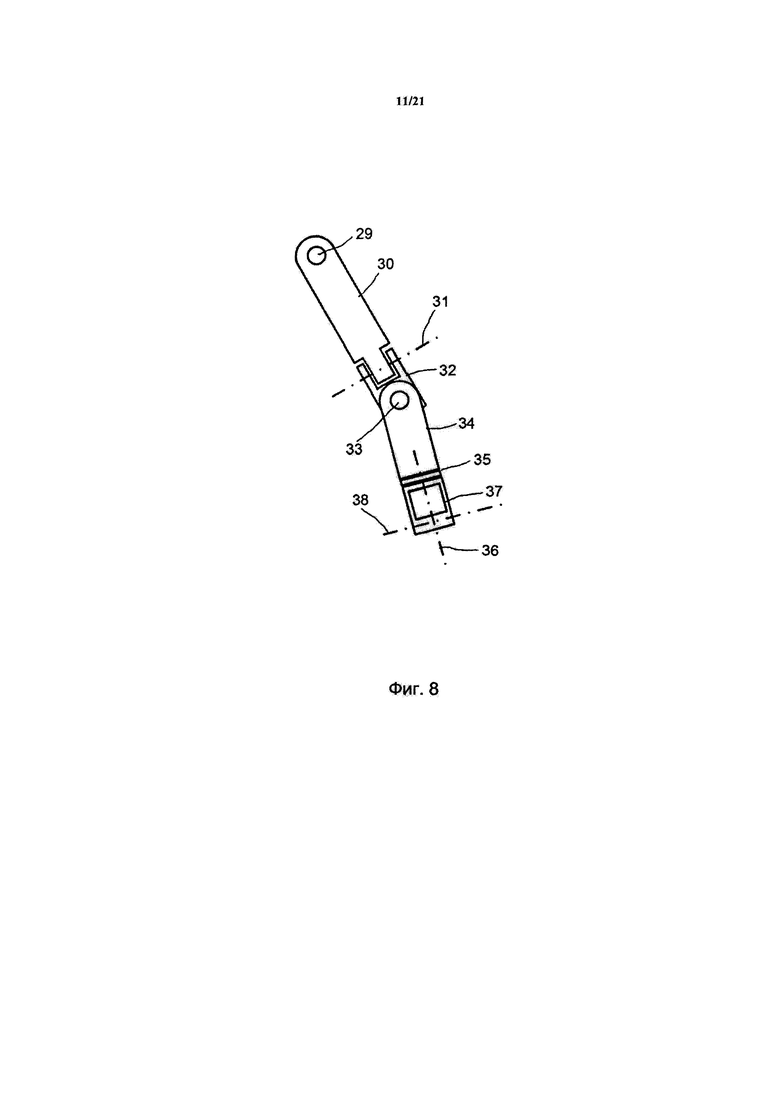
Фиг. 8 схематическое изображение устройства предварительного позиционирования согласно изобретению,
Фиг. 9 схематическое изображение универсально регулируемой несущей конструкции согласно изобретению с присоединенным устройством предварительного позиционирования согласно изобретению, к которому прикреплена механическая рука для активного позиционирования хирургического инструмента согласно изобретению,
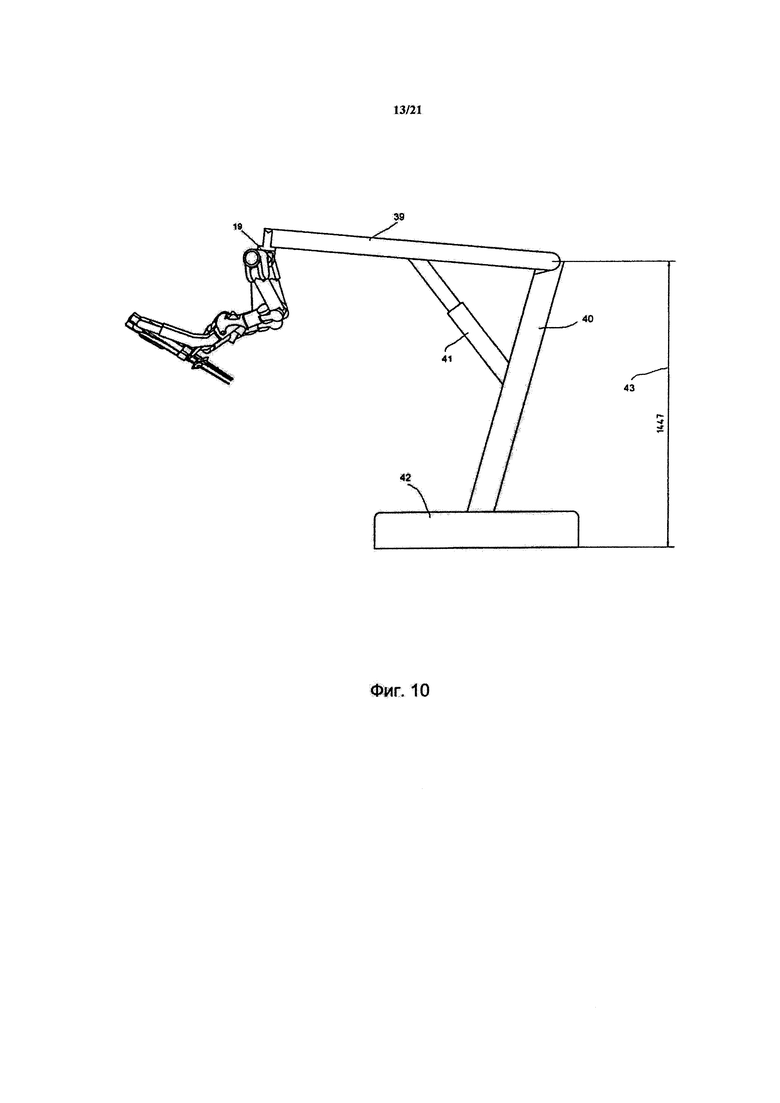
Фиг. 10 схематический вид сбоку высокоуровневой опорной системы, к которой присоединена универсально регулируемая несущая система согласно изобретению в целом с четырьмя присоединенными устройствами предварительного позиционирования согласно изобретению, на которых в каждом случае закреплена механическая рука для активного позиционирования хирургического инструмента согласно изобретению,
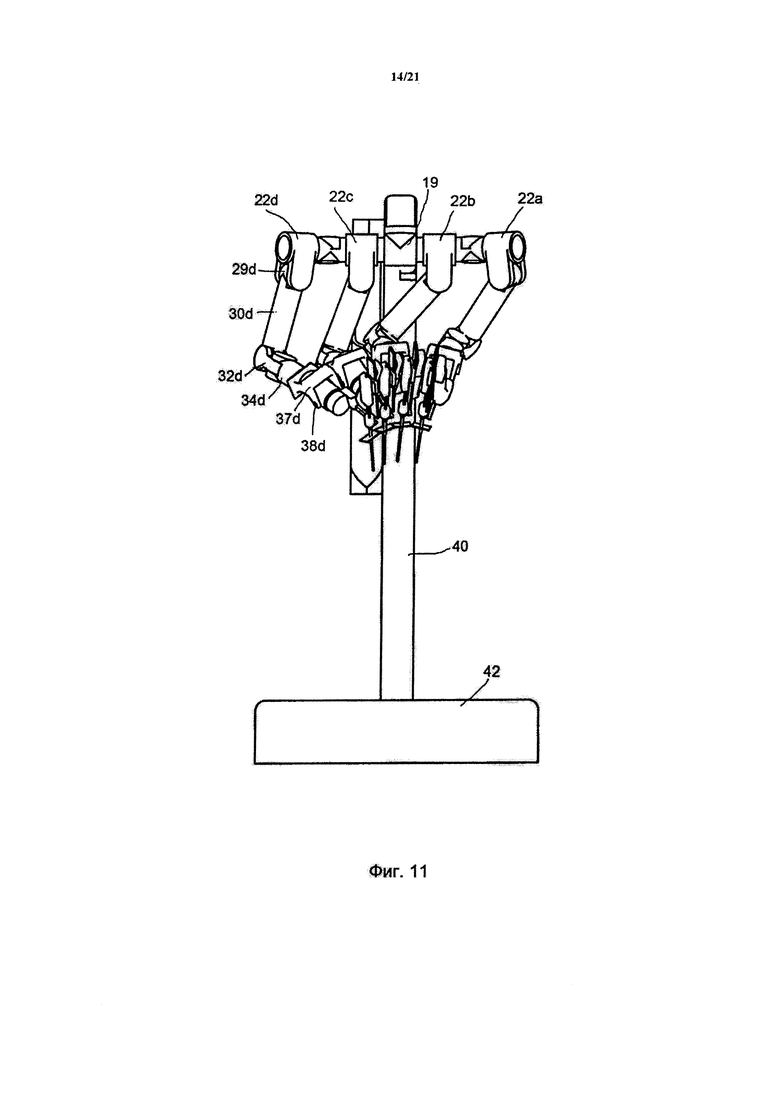
Фиг. 11 схематический вид спереди высокоуровневой опорной системы, к которой присоединена универсально регулируемая несущая система согласно изобретению в целом с четырьмя присоединенными устройствами предварительного позиционирования согласно изобретению, на которых в каждом случае закреплена механическая рука для активного позиционирования хирургического инструмента согласно изобретению,
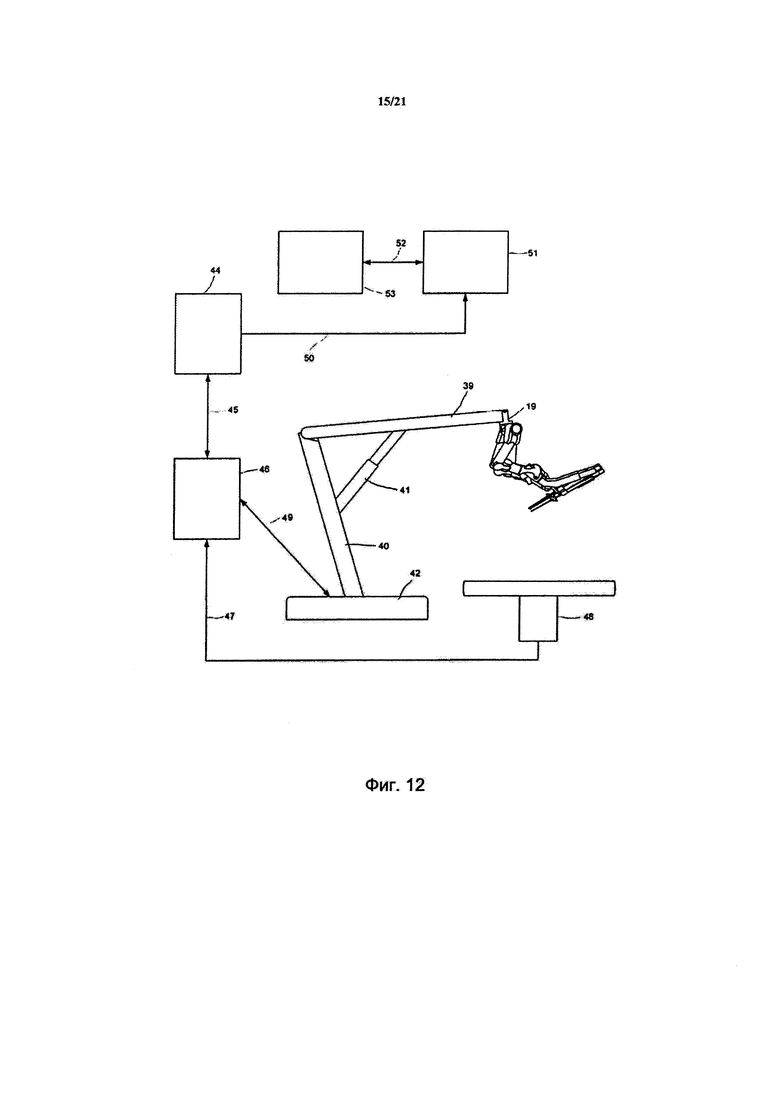
Фиг. 12 схематический общий вид применения высокоуровневой несущей системы в хирургической роботизированной системе для использования при минимально-инвазивной хирургии, как например, лапароскопии.
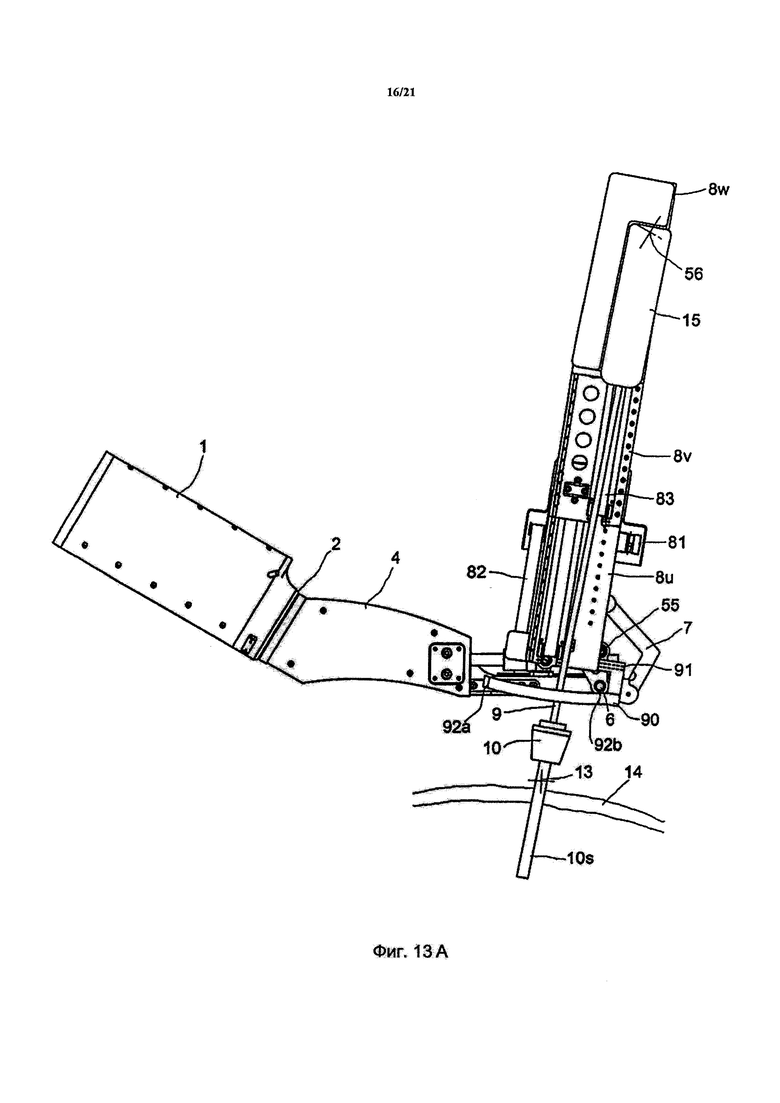
Фиг. 13А схематическое изображение механической руки, на которой направляющее устройство инструмента согласно изобретению размещено на телескопической консоли.
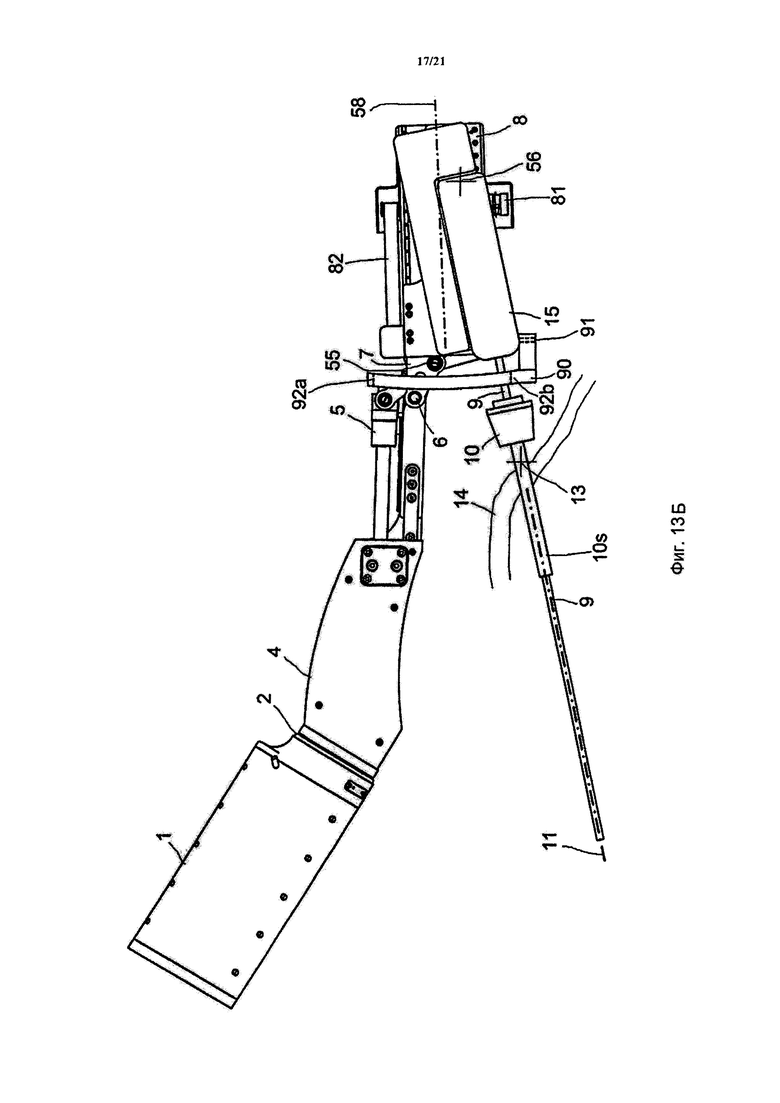
Фиг. 13Б другое схематическое изображение в другом угловом положении механической руки согласно фиг. 13А, на которой направляющее устройство инструмента согласно изобретению размещено на телескопической консоли.
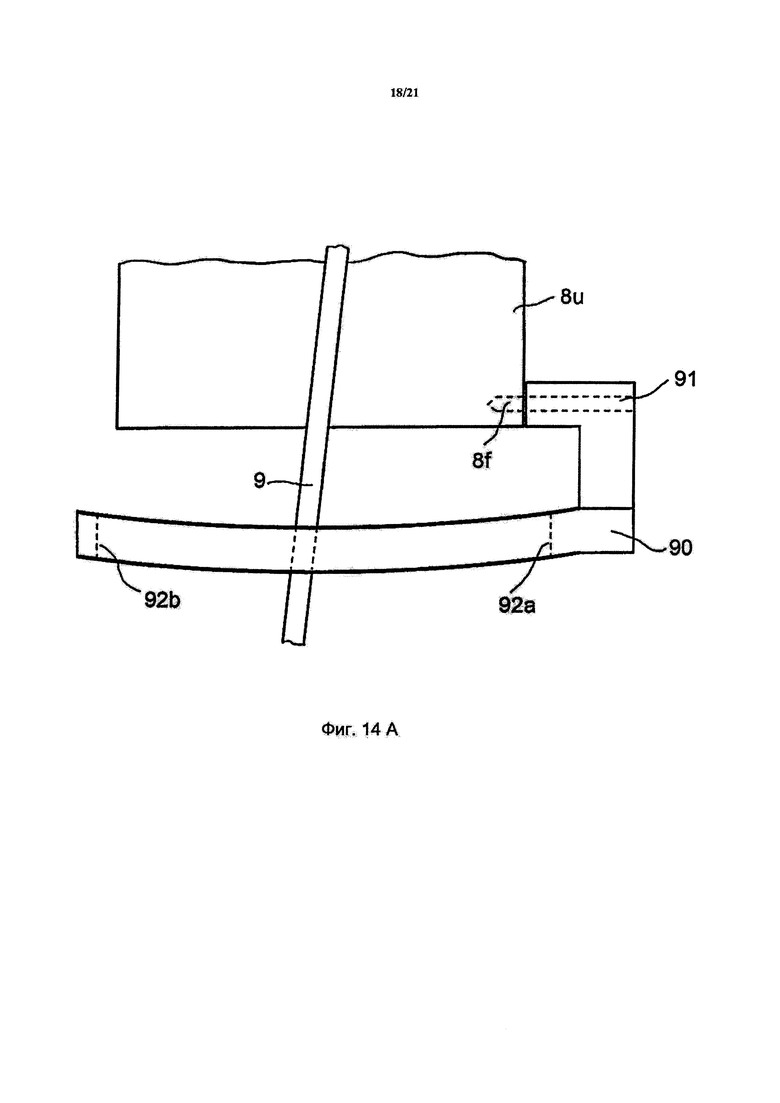
Фиг. 14А, 14Б схематически показывают фрагмент варианта осуществления согласно фиг. 13А и 13Б, относящийся к присоединению направляющего устройства 90.
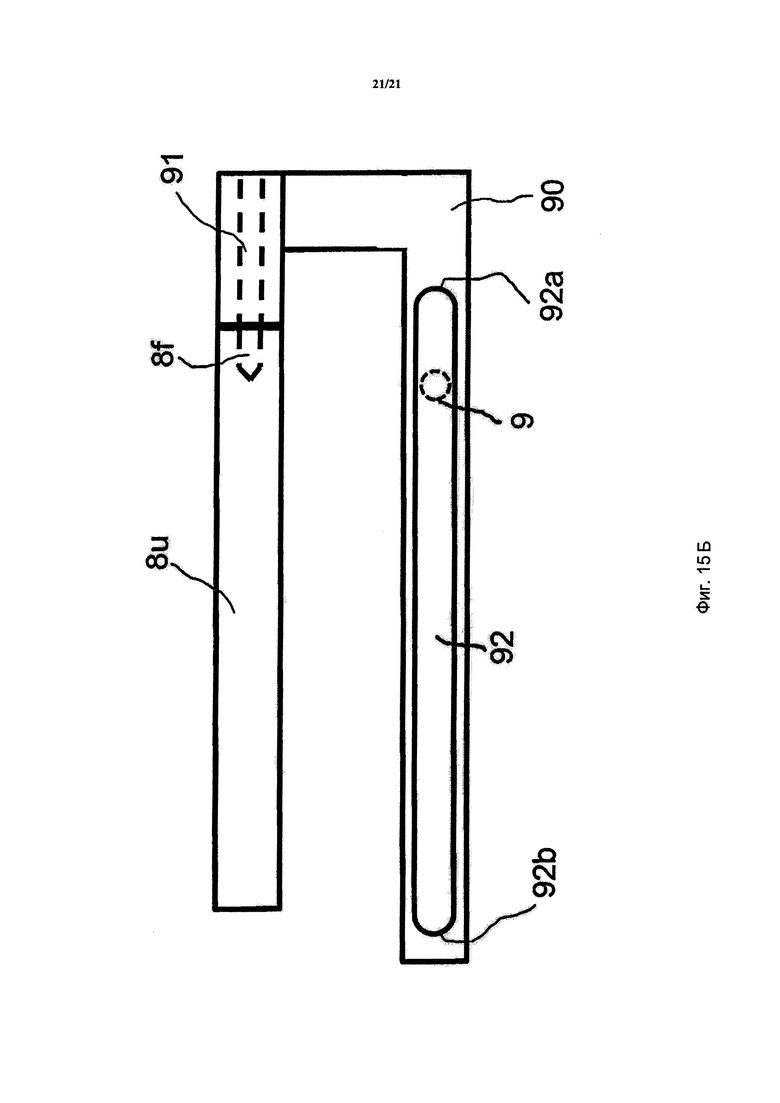
Фиг. 15А, 15Б показывают смещенное по отношению к фиг. 14А и 14Б положение хирургического инструмента 9.
Данное изобретение описывается в последующем подробно со ссылками на чертежи.
Фиг. 1А, 2А, 1Б и 2Б показывают предлагаемую механическую руку для активного позиционирования хирургического инструмента 9, включая соединительный элемент 12 между направляющим устройством 10 для введения хирургического инструмента 9 и конструктивным приспособлением 4 для реализации второй оси вращения. Во время минимально-инвазивного, лапароскопического вмешательства, как правило, четыре операционных инструмента вступают в действие, в том числе три хирургических инструмента и одна камера или же эндоскоп, которыми управляет оператор посредством телеманипуляторной системы. В соответствии с этим в системе, предпочтительно, имеются в наличии четыре варианта осуществления механической руки согласно изобретению. Тем не менее, подразумевается, что также могут быть предусмотрены варианты осуществления с 1-3 или более чем четырьмя механическими руками согласно данному изобретению, причем каждая механическая рука имеет по меньшей мере одно удерживающее и позиционирующее устройство согласно изобретению. Каждая механическая рука имеет три степени свободы для реализации поворотных перемещений присоединенного посредством узла 15 привода инструмента хирургического инструмента 9 в х- и в y-направлении, а также для линейного перемещения в z-направлении. Для этого каждая механическая рука состоит из первого узла привода 1, который делает возможным посредством шарнирного соединения 2 вращательное перемещение величиной по меньшей мере ±120° вокруг оси 3 вращения с точкой отсчета в нулевом положении. Это вращательное перемещение вокруг оси 3 вращения ведет к наклону присоединенного конструктивного приспособления в составе элементов 4, 5, 6, 7, 8, 12 вокруг постоянной точки 13, то есть так называемой точки вращения. Удерживающий элемент 4 несет линейный привод 5, который реализует второе вращательное перемещение ортогонально оси 3 вращения вокруг второй точки поворота 6. Соединительный элемент 12 между удерживающим элементом 4 и проходной втулкой 10 для хирургического инструмента 9 соединен в точке вращения 13 с проходной втулкой 10 таким образом, что ось вращения 3 проходит через эту точку 13 вращения и принуждает проходную втулку 10 к наклону вокруг оси 3 вращения. Проходная втулка 10 реализует для хирургического инструмента 9 доступ через брюшную стенку 14 пациента. Посредством линейного привода 5 в пункте 55 поворота к соединительному поводку 7 производится подведение усилий, что реализует поворот соединительного поводка 7 вокруг точки поворота 6 по меньшей мере на ±60°. Прежде всего, проходная втулка 10 служит в качестве направляющего устройства для хирургического инструмента 9 и имеет направляющий шток 10s, который служит инструменту 9 в качестве инструментальной направляющей и, предпочтительно, выполнен цельно с проходной втулкой 10.
На соединительном поводке 7 расположена телескопическая консоль 8. Телескопическая консоль 8 имеет исполнительный привод 81. Управляющие и питающие линии для исполнительного привода 81 телескопической консоли 8 проходят вдоль линейного привода 5 насквозь через удерживающий элемент 4 и узел 1 привода. Управляющие и питающие линии для линейного привода 5 проходят насквозь через удерживающий элемент 4 и узел 1 привода. На телескопической консоли 8 с возможностью вращения расположен узел 15 привода инструмента, как показано на фиг. 2А или же 2Б. Узел 15 привода инструмента служит для реализации степени свободы 4 присоединенного к нему инструмента 9. Для этого узел 15 привода инструмента оснащен соответствующими исполнительными приводами. Управляющие и питающие линии для исполнительных приводов узла 15 привода инструмента проходят по телескопической консоли 8 вдоль линейного привода 5 насквозь через удерживающий элемент 4 и узел 1 привода.
Наклон соединительного элемента 7 приводит к наклоняющему перемещению закрепленной на нем телескопической консоли 8 вокруг оси 6 вращения и тем самым к наклону узла 15 привода инструмента и присоединенного к нему хирургического инструмента 9. Это приводит к наклоняющему перемещению проходной втулки 10 по оси, ортогональной оси 3 вращения, вокруг точки 13 вращения (см. фиг. 2А). Результирующее положение продольной оси 11 инструмента соответствует оси между точкой 56 поворота инструмента узла 15 привода инструмента на телескопической консоли 8 и точкой 13 вращения. Хирургический инструмент 9 посредством проходной втулки 10 принудительно подается вдоль продольной оси 11 инструмента таким образом, что посредством приводов 1 и 5 реализуется поворотное наклоняющее перемещение хирургического инструмента 9 вокруг точки 13 вращения в располагающихся ортогонально друг другу осях. На соединительном поводке 7 телескопическая консоль 8 расположена таким образом, что закрепленный на телескопической консоли 8 посредством узла 15 привода инструмента хирургический инструмент 9 посредством проходной втулки 10 может быть подан вдоль продольной оси 11 инструмента и тем самым по отношению к брюшной стенке 14. Все конструктивное выполнение может быть реализовано в высшей степени компактно. Хирургические инструменты 9 типично имеют диаметр от 5 до 10 мм и длину от 250 до 300 мм. Вариант осуществления согласно изобретению телескопической консоли 8 выполнен таким образом, что хирургический инструмент 9, предпочтительно, может быть подан по меньшей мере на 250 мм вдоль его продольной оси 11 инструмента по отношению к проходной втулке 10 и, что в случае максимальной глубины погружения хирургического инструмента 9 в проходную втулку 10, телескопическая консоль 8 имеет минимальную длину, то есть только несущественно выступает над проксимальным концом хирургического инструмента 9, и тем самым минимизирована опасность столкновения в результате выполняемых поворотных перемещений между различными хирургическими инструментами 9 или же телескопическими консолями 8 в составе расположенных рядом механических рук. Все конструктивное выполнение имеет по сравнению с уровнем техники существенно пониженные требования к монтажному пространству. Полная габаритная длина 16 механической руки согласно изобретению при измерении от узла привода 1 до точки вращения 13, предпочтительно, составляет менее 500 мм. Вариант осуществления с соединительным элементом 12 для принудительной подачи точки вращения 13 на проходной втулке 10 делает возможным использование механической руки согласно изобретению также при открытых, выполняемых не минимально-инвазивным способом операциях.
Фиг. 3А, 3Б и 4 показывают предлагаемую механическую руку для активного позиционирования хирургического инструмента 9 без механической связи между направляющим устройством 10 для введения хирургического инструмента и конструктивным приспособлением 4 для реализации второй оси вращения. Согласно этому варианту осуществления произведенные посредством узлов 1 и 5 привода наклоняющие перемещения вокруг осей 3 и 6 вращения передаются на точку вращения 13 немеханическим образом. Проходная втулка 10 в этом варианте осуществления действует в качестве плавающей опоры в пределах брюшной стенки 14, как также и в случае производимой вручную лапароскопии с направляемыми вручную инструментами. В этом варианте осуществления получается ориентация оси инструмента между точкой 56 поворота узла 15 привода инструмента и точкой поворота направляющего устройства 10 в брюшной стенке 14. Точка 13 вращения образуется в или на брюшной стенке 14 из результирующей силы между приложенным снаружи моментом и реактивным или же удерживающим моментом брюшной стенки. Это является более щадящим для ткани брюшной стенки, прежде всего, при применении более чем одного инструмента 9 в каждом случае в одном собственном направляющем устройстве 10, поскольку отсутствует какое-либо непосредственно механически закрепленное силовое воздействие через соединительный элемент 12 на направляющее устройство 10 и тем самым на брюшную стенку 14.
Телескопическая консоль 8 служит для перемещения инструмента 9 через направляющее устройство 10 вдоль оси инструмента. Перемещение толкающего элемента производится посредством сдвигания по меньшей мере двух, а предпочтительно трех, телескопических элементов 8u, 8v, 8w друг к другу посредством исполнительного привода 81 и перестановочных элементов 82, 83, предпочтительно выполненных в виде зубчатых ремней. Инструмент 9 с возможностью поворота удерживается посредством узла 15 привода инструмента в точке 56 поворота инструмента на крайнем телескопическом элементе 8w.
Полученная ось 11 инструмента хирургического инструмента 9 за счет расположения точки 55 подведения усилий линейного привода 5 на телескопической консоли 8 не является идентичной телескопической продольной оси 58. За счет выполненного с возможностью поворота расположения узла 15 привода инструмента на крайней телескопической консоли 8w и тем самым, за счет возможности поворотного или же компенсирующего перемещения вокруг точки поворота 56 инструмента как точка 55 подведения усилий, так и точка 6 поворота соединительного элемента 7 не должны располагаться на продольной оси 11 инструмента. Прежде всего, выполненное с возможностью поворота расположение узла 15 привода инструмента вокруг точки поворота 56 инструмента содействует тому, что продольная ось 11 инструмента и телескопическая продольная ось 58 являются варьируемыми по отношению друг к другу, причем точка 55 подведения усилий и точка 56 поворота инструмента отличны друг от друга и взаимно воздействуют друг на друга.
За счет устранения соединительного элемента 12 является возможным направление двух хирургических инструментов 9 через общую проходную втулку 10 посредством двух механических рук согласно изобретению, что представляет собой существенное улучшение по сравнению с уровнем техники и повышение вариативности.
Фиг. 5А и 5Б показывают вид сверху на два различных варианта осуществления механической руки согласно изобретению для активного позиционирования хирургического инструмента. Такое конструктивное выполнение может быть, предпочтительно, использовано в «правосторонней» или «левосторонней» конструкции. По отношению к первому узлу 1a, 1b привода с шарнирным соединением 2а, 2b второй узел 4а привода может располагаться справа от оси 3а вращения - правосторонний вариант осуществления - или же второй узел 4b привода может располагаться слева от оси 3b вращения - левосторонний вариант осуществления. Осуществление ортогонального оси вращения 3а, 3b вращательного перемещения аналогично производится посредством узла привода 5а, 5b. Перемещение хирургического инструмента 9а, 9b вдоль его продольной оси инструмента производится посредством проходной втулки 10а, 10b через телескопическую консоль 8а, 8b. Хирургический инструмент 9а, 9b как таковой механически присоединен посредством узла 15а привода, 15b инструмента к телескопической консоли 8а, 8b.
Фиг. 6 показывает применение двух механических рук согласно изобретению для активного позиционирования хирургического инструмента в «левостороннем» и «правостороннем» вариантах осуществления для общего применения с троакаром 18 с одиночным портом и с проходными втулками 18а, 18b, 18с. Предпочтительно, для этой конфигурации подходят изогнутые инструменты 17а, 17b в комбинации с левосторонней механической рукой 1b, 4b, 8b и с правосторонней механической рукой 1а, 4а, 8а, использование которых обладает тем преимуществом, что хирургические инструменты 17а, 17b могут быть использованы через общий троакар 18, который делает возможным доступ через брюшную стенку 13 пациента, и в каждом случае с отдельными проходными втулками 18а, 18b общего троакара 18. Отдельные проходные втулки 18а, 18b и 18с общего троакара 18 расположены относительно троакара 18с с возможностью наклона за счет использования упругого материала 60. Благодаря возможности использования механической руки согласно изобретению также и без механической связи 12 между удерживающим элементом 4 на механической руке и точкой 13 вращения (см. фиг. 1А), является возможным применение только одного троакара 18 по меньшей мере с двумя проходными втулками 18а, 18b. Применение левосторонней механической руки 1b, 4b, 8b согласно изобретению и правосторонней механической руки 1а, 4а, 8а согласно изобретению может минимизировать опасность столкновения между механическими руками в результате поворотных наклоняющих перемещений.
За счет предпочтительного применения изогнутых инструментов 17а и 17b в троакаре 18 с одиночным портом относительное перемещение 62а, 62b обоих инструментов подводит их друг к другу, например, для соединения в операционном поле ткани посредством шва, а относительное перемещение 61а, 61b обоих располагающихся вне пациента механических рук направлено прочь друг от друга. Тем самым предотвращено какое-либо столкновение между механическими руками.
Из уровня техники известно применение перекрещенных инструментов в операционной технике с одиночным портом. В противоположность этому, предложенная здесь конструкция имеет преимущество принципиально обусловленного предотвращения столкновения при сближении или же при перемещении друг к другу наконечников инструментов в теле пациента.
Фиг. 7 показывает конструктивное выполнение вариативной несущей системы или же крепежно-несущей системы 19-26 для, предпочтительно, до четырех устройств предварительного позиционирования и механических рук. Вариативная несущая система может быть удержана посредством присоединительной площадки 19 на высокоуровневой опорной системе таким образом, что вариативная несущая система может быть расположена в оптимальном положении путем поворота вокруг оси 20 вращения по меньшей мере на ±90°. Предпочтительно, вариативная несущая система состоит из четырех присоединительных площадок 22а…d для размещения до четырех устройств предварительного позиционирования. Внешние присоединительные площадки 22а, 22d соединены посредством шарниров 23, 24 с присоединительными площадками 22b, 22с таким образом, что они могут быть наклонены до 30° по отношению к оси 20. Все конструктивное выполнение оптимизировано по параметру минимального монтажного пространства 25, 26, размерами примерно 415 мм и, соответственно, 350 мм как примерный вариант осуществления и может быть, предпочтительно, выполнено таким образом, что, например, ширина вариативной несущей системы может составлять максимально 700 мм.
Фиг. 8 показывает устройство 29…38 предварительного позиционирования согласно изобретению для размещения на вариативной несущей системе (фиг. 7) и для приема механической руки согласно изобретению (фиг. 1…4). Устройство предварительного позиционирования прикрепляется посредством соединительного шарнира 29 к присоединительной площадке (например, 22d) вариативной несущей системы и делает возможным вращение первого элемента 30 предварительного позиционирования, предпочтительно, на ±90° по отношению к вариативной несущей системе, или же присоединительной площадке (например, 22d). Второй элемент 32 предварительного позиционирования расположен посредством другого шарнира 31 с возможностью вращения по отношению к первому элементу 30 предварительного позиционирования еще на дополнительные ±90°. Оси вращения присоединительной площадки 29 и шарнира 31, предпочтительно, расположены ортогонально друг другу. Второй элемент 32 предварительного позиционирования соединен посредством другого шарнира 33 с третьим элементом 34 предварительного позиционирования таким образом, что третий элемент 34 предварительного позиционирования расположен по отношению ко второму элементу 32 предварительного позиционирования с возможностью вращения на ±90°. Третий элемент 34 предварительного позиционирования соединен с четвертым элементом 37 предварительного позиционирования посредством шарнирного соединения 35. При этом ось 36 вращения, предпочтительно, располагается в каждом случае ортогонально оси вращения шарнира 31 и 33 и делает возможными вращательные перемещения на ±90°. Четвертый элемент 37 предварительного позиционирования обладает присоединительной площадкой, которая делает возможным вращательное перемещение вокруг оси 38 вращения ортогонально оси 36 вращения. На оси 38 вращения производится присоединение механической руки согласно изобретению, как показано на фиг. 1, 2, 3, 4, 5А и 5Б.
Фиг. 9 показывает предпочтительный вариант осуществления для соединения вариативной крепежно-несущей системы 19-26 согласно изобретению с устройством 29-38 предварительного позиционирования согласно изобретению совместно с присоединенной к нему в качестве примера механической рукой 1, 2, 3, 4, 8, 10, 15 согласно изобретению. Узел 1 привода механической руки соединен с четвертым элементом 37 предварительного позиционирования устройства предварительного позиционирования на оси 38 вращения. Конструктивное выполнение выполнено таким образом, что на оси 38 вращения к устройству предварительного позиционирования может быть выборочно присоединен левосторонний или правосторонний вариант осуществления механической руки согласно изобретению.
Фиг. 10 и 11 показывают конструктивное выполнение хирургической роботизированной системы согласно изобретению и, прежде всего, высокоуровневой опорной системы 39-43, к который присоединена универсально регулируемая несущая система согласно изобретению 22а-22d посредством присоединительной площадки или же сопряженно-несущего соединения 19. Высокоуровневая опорная система делает возможным оптимальное предварительное позиционирование вариативной несущей системы 22а-22d посредством горизонтальной ориентации, предпочтительно, выполненного перемещаемым к операционному столу 48 базового носителя или же неподвижной опоры 42 (смотри фиг. 12), и вертикальной ориентации посредством настройки оптимального угла между блоками 39 и 40 с помощью регулировочного элемента 41. На вариативной несущей системе согласно изобретению через присоединительную площадку 29d согласно изобретению закреплено устройство 29d…38d предварительного позиционирования согласно изобретению, которое принимает механические руки согласно изобретению на присоединительной площадке 38d. Все конструктивное выполнение отличается от уровня техники тем, что роботизированные компоненты сконцентрированы все вместе в механической руке, и поэтому все конструктивное выполнение требует существенно меньшего монтажного пространства по сравнению с уровнем техники и имеет, прежде всего, высоту 43 величиной, например, лишь 1447 мм.
Фиг. 12 показывает схематический общий вид применения высокоуровневой опорной системы 39…42 в хирургической роботизированной системе для использования при минимально-инвазивной хирургии, как например, лапароскопии. Действуя с панели 44 управления, пользователь может передавать управляющие команды для исполнительных механизмов механической руки согласно изобретению через подходящий канал 45 передачи данных в блок 46 управления. Этот блок через другую линию 49 передачи данных соединен с высокоуровневой опорной системой 39…42 и, оснащенный консолью или же главным опорным устройством 39, 40, способен предварительно позиционировать присоединенную посредством присоединительной площадки 19 вариативную несущую систему соответственно положению пациента на операционном столе 48 таким образом, что вариативная несущая система в сочетании с устройствами предварительного позиционирования делает возможным оптимальное позиционирование механических рук.
При оборудовании механической руки согласно изобретению, например, эндоскопической камерой визуальные сигналы через подходящие каналы 49, 45, 50 передачи данных могут подводиться к вычислительному устройству 51, которое подготавливает визуальные данные для представления и подводит их через последующий участок 52 передачи данных к блоку 53 визуального отображения информации. Блок 53 визуального отображения информации может представлять как двухмерные, так и трехмерные визуальные данные, например по отдельности, однако также и скомбинированными в едином изображении или же единой последовательности изображений. Выбор системы управления, визуальные данные которой подлежат представлению, производится посредством блока 44 управления по желанию оператора или же хирурга. Для этого произведенные блоком 44 управления управляющие команды передают посредством участка 50 передачи данных к вычислительному устройству 51.
Согласно другому варианту осуществления установка согласно изобретению выполнена таким образом, что на телескопическом устройстве размещено направляющее инструмент устройство, через которое вводится хирургический инструмент в поперечной продольной протяженности плоскости, причем направляющее инструмент устройство имеет, прежде всего, направляющее отверстие для варьируемого позиционирования хирургического инструмента. На телескопическом устройстве размещено дополнительное направляющее инструмент устройство, насквозь через которое простирается шток хирургического инструмента и/или эндоскопа. Это дополнительное направляющее устройство для инструментов неподвижно соединено с телескопическим устройством. Посредством этого дополнительного направляющего инструмент устройства хирургический инструмент и/или эндоскоп при вращении механической руки принудительно направляется вокруг первой оси вращения. За счет конструктивного выполнения дополнительного направляющего инструмент устройства принудительное направление для перемещений механической руки производится только вокруг первой оси вращения. При вращениях механической руки вокруг второй оси вращения дополнительное направляющее инструмент устройство делает возможным свободное перемещение хирургического инструмента и/или эндоскопа таким образом, что образуется результирующая ось инструмента, задаваемая вращением узла привода инструмента на телескопическом устройстве и положением первого направляющего устройства (троакара), насквозь через который простирается хирургический инструмент и/или эндоскоп.
Фиг. 13А, 13Б, 14А, 14Б, 15А, 15Б показывают предлагаемую механическую руку для активного позиционирования хирургического инструмента 9 без механической связи между направляющим устройством 10 для прохода хирургического инструмента 9 и конструктивным приспособлением 4 для реализации второй оси вращения. Фиг. 13А и 13Б показывают вариант осуществления изобретения, который по существу соответствует варианту осуществления на фиг. 3А и 3Б с направляющим инструмент устройством 90.
На телескопической консоли 8 направляющее инструмент устройство 90 посредством повторно разъединяемого крепежного устройства 91, выполненного, прежде всего, в форме винта, размещено таким образом, что при вращении механической руки вокруг первой оси вращения (вращении шарнирного соединения 2) хирургический инструмент 9 в принудительном порядке направляется через или же внутри направляющего устройства 90 для инструментов. Направляющее инструмент устройство 90 конструктивно выполнено таким образом, что хирургический инструмент 9 при наклоне механической руки вокруг второй оси 2 вращения (вращение вокруг центра 6 вращения) может свободно сдвигаться в пределах направляющего инструмент устройства 90 в удлиненном пазу 92 между ограничениями 92а и 92b удлиненного паза 92 вдоль оси таким образом, что результирующая направленность продольной оси хирургического инструмента 9 получается без принудительного направления, но задается посредством центра 56 вращения инструмента и направляющего устройства 10.
Это решение имеет то преимущество, что при вращении хирургического инструмента 9 вокруг первой оси вращения (вращение вокруг шарнирного соединения 2) хирургический инструмент 9 направляется принудительным образом, а применяемое для принудительного направления направляющее инструмент устройство 90 воспринимает воздействующие в направлении оси 6 вращения на хирургический инструмент 9 усилия без необходимости в механическом соединении или же связи проходной втулки 10 инструмента с механической рукой.
Фиг. 13Б поясняет способность к свободному повороту инструмента 9 в направляющем инструмент устройстве 90 между ограничениями 92а и 92b направляющего отверстия.
Фиг. 14А, 14Б схематически показывают в виде частичного разреза вариант осуществления согласно фиг. 13А и 13Б с направляющим инструмент устройством 90, которое закреплено на телескопической консоли 8u посредством непоказанного винта в крепежном устройстве 8f, 91, предпочтительно выполненном в виде разъединяемого резьбового или вставного соединения. Кроме того, представлено удлиненное направляющее отверстие 92 с его боковыми ограничениями 92а и 92b, между которыми может перемещаться хирургический инструмент 9.
Фиг. 15А, 15Б схематически также показывают соединение направляющего инструмент устройства 90 с телескопической консолью 8u для последующей ориентации хирургического инструмента 9 по отношению к продольной оси телескопической консоли 8u, из чего очевидно, что хирургический инструмент 9 способен к перемещению в его положении в пределах направляющего инструмент устройства 90.
Вариант осуществления изобретения согласно фиг. 13-15 с направляющим инструмент устройством 90 имеет, прежде всего, то преимущество, что отсутствует какая-либо зависимость от предела механической нагрузки троакара или же проходной втулки 10 инструмента.
Кроме того, направляющее инструмент устройство 90 содействует тому, что за счет по-прежнему наличествующего рассоединения продольной оси хирургического инструмента 9 от продольной оси телескопической консоли 8 результирующая точка 13 вращения образуется на месте, в котором биомеханические нагрузки на брюшную стенку являются минимальными благодаря отсутствию наклона инструментальной направляющей 10.
Таким образом, данное изобретение относится, с одной стороны, к удерживающему и позиционирующему устройству для хирургического инструмента и/или эндоскопа, причем одно или несколько таких удерживающих и позиционирующих устройств согласно изобретению размещены в каждом случае на хирургической роботизированной системе посредством присоединительных площадок, причем эти присоединительные площадки, в свою очередь, в каждом случае соединены друг с другом таким образом, что необходимое для хирургической роботизированной системы монтажное пространство выгодным образом является только очень незначительным. Особо компактный способ построения проявляет себя, кроме того, через особо легкую и компактную осуществимость удерживающего и позиционирующего устройства согласно изобретению, причем она может быть также использована для дооснащения уже существующей роботизированной системы.
В предпочтительном варианте осуществления направляющее устройство неподвижно присоединено к проходной втулке хирургического инструмента посредством соединительного элемента с конструктивным приспособлением для образования второй оси вращения. Зв счет этого вращательное движение оси 1 вращения приводит к принудительному перемещению направляющего устройства к проходной втулке хирургического инструмента вокруг постоянной точки в х-направлении.
В другом предпочтительном варианте осуществления направляющее устройство не присоединено неподвижно к проходной втулке хирургического инструмента посредством соединительного элемента с конструктивным приспособлением для образования второй оси вращения. Тем самым направляющее устройство действует по отношению к проходной втулке хирургического инструмента в качестве плавающей опоры в брюшной стенке, как это является обычным при производимой вручную лапароскопии.
В еще одном другом предпочтительном варианте осуществления хирургический инструмент посредством узла привода инструмента присоединен к телескопическому устройству, которое содержит вращательный привод, посредством которого шток хирургического инструмента может вращаться с переменной скоростью по отношению к исходному положению вокруг z-направления. Предпочтительно, узел привода инструмента имеет три приводных устройства инструмента, посредством которых прикрепленный на дистальном конце рабочий узел хирургического инструмента подвижен с тремя другими степенями свободы. Прежде всего, предпочтительно, узел привода инструмента размещен с возможностью вращения посредством поддерживающего устройства на проксимальном конце телескопической системы.






Группа изобретений относится к медицине. Удерживающее и позиционирующее устройство инструмента для минимально-инвазивной хирургии для применения в рамках хирургической роботизированной системы содержит: узел привода инструмента; телескопическое устройство, на котором посредством узла привода инструмента закреплен хирургический инструмент; узел привода, который имеет первую ось вращения, вокруг которой с возможностью вращения расположен удерживающий элемент. Хирургический инструмент посредством телескопического устройства является линейно подвижным вдоль его продольной оси инструмента в тело посредством направляющего устройства. Первая ось вращения постоянно пересекается с продольной осью инструмента хирургического инструмента в точке вращения. На удерживающем элементе размещен линейный привод, а телескопическое устройство расположено на выполненном в виде соединительного шарнира соединительном поводке. Линейный привод выполнен подводящим усилия на выполненную на соединительном поводке в виде точки поворота точку крепления линейного привода. Узел привода инструмента на телескопическом устройстве посредством точки поворота инструмента установлен с возможностью вращения. Соединительный поводок имеет соединительную точку поворота, которая жестко соединена с удерживающим элементом и задает вторую ось вращения, которая расположена перпендикулярно к первой оси вращения и на расстоянии от нее так, что посредством подведения усилий через линейный привод на соединительный поводок является реализуемым поворот соединительного поводка вокруг второй оси вращения, за счет чего продольная ось инструмента хирургического инструмента является варьируемо регулируемой в зависимости от линейного привода относительно телескопической продольной оси телескопического устройства, и узел привода инструмента является вращаемым вокруг ортогональной первой оси вращения оси вокруг точки вращения. Хирургическая роботизированная система содержит несколько удерживающих и позиционирующих устройств. По меньшей мере два удерживающих и позиционирующих устройства размещены на проходящей по существу поперечно удерживающему и позиционирующему устройству крепежно-несущей системе. Крепежно-несущая система выполнена соответственно из присоединительной площадки для каждого удерживающего и позиционирующего устройства. Присоединительные площадки соединены друг с другом соответственно жестко или посредством шарниров. Изобретение обеспечивает расширение диапазона регулировки предварительного позиционирования для устройства крепления механической руки, а также обеспечивает уменьшение монтажного пространства и большую компактность, и легкость конструкции. 2 н. и 11 з.п. ф-лы, 22 ил.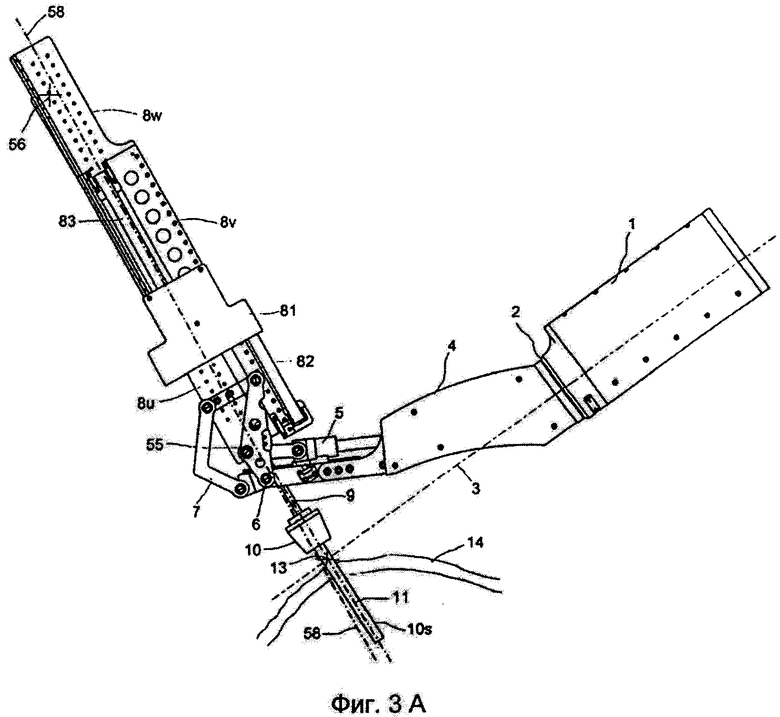
1. Удерживающее и позиционирующее устройство инструмента для минимально-инвазивной хирургии для применения в рамках хирургической роботизированной системы, содержащее:
- узел (15) привода инструмента,
- телескопическое устройство (8), на котором посредством узла (15) привода инструмента закреплен хирургический инструмент (9; 17a, 17b), причем хирургический инструмент (9; 17a, 17b) посредством телескопического устройства (8) является линейно подвижным вдоль его продольной оси (11) инструмента в тело посредством направляющего устройства (10, 10s),
- узел (1) привода, который имеет первую ось (3) вращения, вокруг которой с возможностью вращения расположен удерживающий элемент (4), причем первая ось (3) вращения постоянно пересекается с продольной осью (11) инструмента хирургического инструмента (9; 17a, 17b) в точке (13) вращения,
отличающееся тем, что
- на удерживающем элементе (4) размещен линейный привод (5), а телескопическое устройство (8) расположено на выполненном в виде соединительного шарнира соединительном поводке (7), причем линейный привод (5) выполнен подводящим усилия на выполненную на соединительном поводке (7) в виде точки поворота точку (55) крепления линейного привода,
- причем узел (15) привода инструмента на телескопическом устройстве (8) посредством точки (56) поворота инструмента установлен с возможностью вращения, и соединительный поводок (7) имеет соединительную точку (6) поворота, которая жестко соединена с удерживающим элементом (4) и задает вторую ось вращения, которая расположена перпендикулярно к первой оси (3) вращения и на расстоянии от нее так, что посредством подведения усилий через линейный привод (5) на соединительный поводок (7) является реализуемым поворот соединительного поводка (7) вокруг второй оси вращения, за счет чего продольная ось (11) инструмента хирургического инструмента (9; 17a, 17b) является варьируемо регулируемой в зависимости от линейного привода (5) относительно телескопической продольной оси (58) телескопического устройства (8), и узел (15) привода инструмента является вращаемым вокруг ортогональной первой оси (3) вращения оси вокруг точки (13) вращения.
2. Удерживающее и позиционирующее устройство по п. 1, отличающееся тем, что телескопическое устройство (8) имеет несколько телескопических элементов (8u, 8v, 8w), причем точка (56) поворота инструмента расположена на телескопическом элементе (8w), который имеет наибольшую телескопическую возможность перестановки.
3. Удерживающее и позиционирующее устройство по п. 1, отличающееся тем, что направляющее устройство (10, 10s) имеет по меньшей мере одну инструментальную направляющую (10s), в которой насквозь простирается шток хирургического инструмента (9; 17a, 17b).
4. Удерживающее и позиционирующее устройство по п. 1, отличающееся тем, что узел (15) привода инструмента перемещает хирургический инструмент (9; 17a, 17b) с несколькими степенями свободы, причем управление узлом (15) привода инструмента происходит через оператора по управляющим и питающим линиям, которые проведены насквозь через удерживающий элемент (4) и линейный привод (5), посредством блока (44) управления.
5. Удерживающее и позиционирующее устройство по п. 1, отличающееся тем, что первая ось (3) вращения образуется посредством того, что предусмотрен узел (1) привода, который выполнен с возможностью закрепления на механической руке, причем между узлом (1) привода и удерживающим элементом (4) предусмотрено шарнирное соединение (2).
6. Удерживающее и позиционирующее устройство по п. 1, отличающееся тем, что на удерживающем элементе (4) размещен соединительный элемент (12), который дистальным концом с возможностью вращения соединен в точке (13) вращения с инструментальной направляющей (10s).
7. Удерживающее и позиционирующее устройство по п. 1, отличающееся тем, что несколько хирургических инструментов (17a, 17b) направляются насквозь через единственный троакар (18) во внутреннюю часть тела, причем для каждого хирургического инструмента (17a, 17b) предусмотрен отдельный узел привода (15a, 15b) инструмента, и причем, прежде всего, хирургические инструменты (17a, 17b) выполнены в продольном направлении дугообразными.
8. Удерживающее и позиционирующее устройство по п. 1, отличающееся тем, что удерживающий элемент (4) и/или узел (1) привода выполнен с возможностью приспособления в его исходном положении посредством устройства предварительного позиционирования, причем устройство предварительного позиционирования имеет один или несколько элементов (30, 32, 34, 37) предварительного позиционирования, которые являются предварительно устанавливаемыми в их положении посредством соответственно по меньшей мере одной оси вращения, причем, прежде всего, четыре элемента (30, 32, 34, 37) предварительного позиционирования являются предварительно устанавливаемыми в последовательно варьируемых по отношению друг к другу положениях.
9. Удерживающее и позиционирующее устройство по п. 1, отличающееся тем, что на телескопическом устройстве (8) размещено направляющее инструмент устройство (90), через которое вводится хирургический инструмент (9) в поперечной продольной протяженности плоскости, причем направляющее инструмент устройство (90) имеет, прежде всего, направляющее отверстие (92) для варьируемого позиционирования хирургического инструмента (9).
10. Хирургическая роботизированная система с несколькими удерживающими и позиционирующими устройствами по одному из пп. 1-9, причем по меньшей мере два удерживающих и позиционирующих устройства размещены на проходящей по существу поперечно удерживающему и позиционирующему устройству крепежно-несущей системе (19, 20, 21, 22, 23, 24), причем крепежно-несущая система (19, 20, 21, 22, 23, 24) выполнена соответственно из присоединительной площадки (22a-d) для каждого удерживающего и позиционирующего устройства, и причем присоединительные площадки (22a-d) соединены друг с другом соответственно жестко или посредством шарниров (23, 24).
11. Хирургическая роботизированная система по п. 10, отличающаяся тем, что крепежно-несущая система (19, 20, 21, 22, 23, 24) посредством сопряженно-несущего соединения (19) соединена с простирающимся по существу вертикально главным опорным устройством (39, 40) для опоры на неподвижную опору (42), которая расположена подвижно или задана относительно закрепленного или перемещаемого операционного стола (48).
12. Хирургическая роботизированная система по п. 10 или 11, отличающаяся тем, что предусмотрен центральный блок (46) управления, который соединен с каждым из удерживающих и позиционирующих устройств с соответствующими хирургическими инструментами (9; 17a, 17b) и/или эндоскопами (9; 17a, 17b) и сопряжен с панелью (44) управления для введения команд в форме управляющих данных оператора, которая предоставляет визуальные данные одного или нескольких эндоскопов (9; 17a, 17b) посредством блока (53) визуального отображения информации.
13. Хирургическая роботизированная система по п. 10 или 11, отличающаяся тем, что блок (46) управления и панель (44) управления соединены с выполненным с возможностью перемещения операционным столом (48), причем как визуальные данные, так и управляющие данные обрабатываются в зависимости от заданных положений как удерживающего и позиционирующего устройства, так и операционного стола (48).
| US 20070137371 A1, 21.06.2007 | |||
| Способ определения режущих свойств инструментальных материалов | 1957 |
|
SU122326A1 |
| US 0006451027 B1, 17.09.2002 | |||
| US 20100234856 A1, 16.09.2010. | |||

