Заявляемое изобретение относится к области медицинского оборудования, в частности к манипуляторам хирургических роботизированных систем для минимального инвазивного вмешательства.
Традиционным видом хирургического вмешательства является лапаратомия, которая заключается в выполнении длинного разреза в брюшной полости, через который вставляются традиционные хирургические инструменты. Однако выполнение длинных разрезов неминуемо приводит к высоким кровопотерям и длительному восстановлению пациентов. Кроме того возрастает риск инфекционных осложнений.
Применение малоинвазивных хирургических вмешательств (лапароскопия) позволяет устранить указанные недостатки. Вместо одного длинного разреза на пациенте делают от четырех до пяти маленьких, через которые вводятся длинные и тонкие хирургические инструменты и эндоскопические камеры. Данный метод уменьшает кровопотери, сокращает время пребывания в больнице и уменьшает болезненные ощущения пациента в период восстановления. Однако, несмотря на вышеупомянутые преимущества, лапароскопия требует от хирурга чрезвычайно высоких навыков работы. Входной разрез действует как точка вращения, уменьшая свободу позиционирования и ориентации инструментов внутри пациента. Кроме того, работа с эндоскопическими инструментами вынуждает хирургов работать в неудобной позе, что может быть утомительным в течение нескольких часов работы, снижается чувствительность, усиливается тремор рук хирурга.
Развитие лапароскопии привело к возникновению роботохирургии и, в частности, к возможности применения роботизированных хирургических систем. С помощью компьютеризированного роботизированного интерфейса данные системы позволяют выполнять лапароскопию дистанционно, при этом хирург сидит за консолью и управляет манипуляторами, передающими движения непосредственно на хирургические инструменты. Минимально-инвазивные хирургические операции с применением роботизированных систем характеризуются низкой травматичностью, более быстрым выздоровлением пациента, сниженным риском развития осложнений и высокой эффективностью.
При робот-ассистированных операциях используется «контроллер», который считывает механические движения рук хирурга-оператора, находящегося удаленно за консолью хирурга и преобразует их в цифровые сигналы, которые, в свою очередь используются для управления движениями манипулятора на консоли пациента и связанного с ним инструмента.
Исполнительным механизмом в роботохирургических системах являются манипуляторы, которые осуществляют перемещения хирургических инструментов непосредственно в операционном поле. Применение в хирургии манипуляторов и их совершенствование становится все более актуальной научной и технической задачей.
Известна медицинская роботизированная система (патент EP1984150, опубл. 29.10.2008), содержащая манипулятор, содержащий опорное основание и рычаг, включающий вертикальную часть, горизонтальную часть и соединенное с ней запястье, непосредственно к которому крепится исполнительный блок с хирургическим инструментом. Указанный рычаг манипулятора имеет цилиндрическую кинематическую конфигурацию, имеющую три последовательных звена: призматическое звено для изменения высоты вертикальной части рычага поворотное звено для изменения угла поворота между указанными вертикальной и горизонтальной частями и призматическое звено для регулирования выхода и удлинения указанной горизонтальной части путем обеспечения поступательной степени свободы вдоль по существу горизонтальной оси.
Недостатком указанного технического решения является большое количество звеньев, что приводит к снижению точности и надежности, увеличению люфта, а также снижению повторяемости. Применение в данном манипуляторе шести серводвигателей вызывает вибрации инструмента.
Известна хирургическая система (патент США №10299883, МПК A61B 19/00, A61B 90/50, A61B 90/10, A61B 34/00, A61B 90/00, A61B 34/30, опубликован 05.02.2015), включающая в себя манипулятор, соединенный с хирургическим инструментом. На проксимальном конце инструмента может устанавливаться блок электродвигателя. Поворотное плечо манипулятора имеет ось вращения, которая пересекает ось вращения основного поворотного механизма в точке, через которую также проходит ось тангажа механизма наклона. При этом механизм наклона состоит из трех секций, подвижных относительно друг друга. Управление осями поворотного плеча манипулятора, основного поворотного механизма и механизма наклона позволяют достичь желаемого положения хирургического инструмента.
В указанном манипуляторе применяется три серводвигателя, из-за чего происходит увеличение количества степеней свободы, что приводит к снижению точности, повторяемости, увеличению люфта, а также снижению надежности и жесткости на изгиб и кручение.
Известен манипулятор с дистанционным управлением (международная заявка WO2013181522, МПК A61B 19/00, B25J 9/06, B25J 17/00, B25J 13/06, опубликован 05.12.2013), устанавливаемый на монтажном основании и включающий в себя основное звено, соединенное с монтажным основанием и механизмом поворота в горизонтальной плоскости. Манипулятор также содержит несколько соединительных звеньев, образующих между собой параллелограмм, при этом одно из соединительных звеньев связано с механизмом, обеспечивающим изменение угла наклона манипулятора. При этом оси указанных механизма изменения угла наклона и механизма поворота в горизонтальной плоскости пересекаются с осью рыскания, осью крена и осью инструмента в одной точке. Манипулятор также содержит держатель инструмента, в который устанавливается удлиненный инструмент, выполненный с возможностью введения в тело пациента. Соединительная часть манипулятора, образованная из соединительных звеньев, сконфигурирована для обеспечения движения держателя инструмента, при этом ось инструмента постоянно проходит через точку пересечения всех осей манипулятора. Соединительные звенья манипулятора соединены между собой подвижно.
Известен манипулятор (международная заявка WO2014/146120, МПК B25J18/00; B25J9/16; G05B19/408; G05B19/416, опубликован 18.09.2014), включающий в себя основание, к которому крепится первый поворотный элемент, обеспечивающий вращение манипулятор вокруг оси J1. Манипулятор выполнен из нескольких звеньев, соединенных между собой с помощью шарниров. На конце манипулятора имеется держатель инструмента, к которому крепится инструмент для выполнения хирургических операций. Держатель инструмента может содержать дополнительные шарниры для облегчения осевого перемещения инструмента через минимальное инвазивное отверстие и удобства прикрепления держателя инструмента к канюле, через которую устанавливается инструмент с возможностью скольжения.
В качестве наиболее близких решений выбраны устройства для перемещения хирургического инструмента (патент EP0699053, опубл.06.03.1996 г. и международная заявка WO2008157225, опубликован 12.06.2008), содержащие рычажный механизм, включающий жесткие звенья, образующие параллелограмм. Устройства также включают в себя опорную плиту, на которой устанавливается первое звено рычажного механизма с возможностью поворота вокруг оси, инструмент, монтажное средство инструмента, удерживающее упомянутый инструмент в таком положении, что удаленный центр вращения инструмента пересекает упомянутую ось, второе звено рычажного механизма, соединенное с монтажным средством для перемещения монтажного средства в плоскости параллельной второму звену, при этом второе звено шарнирно соединено с первым и при перемещении второе звено остается параллельным указанной оси, а первое звено параллельным указанному инструменту.
Недостатками указанных выше решений являются меньшая жесткость на изгиб и кручение, что, в свою очередь, приводит к снижению точности и повторяемости.
Техническая задача заявляемого изобретения заключается в повышении эффективности роботизированного хирургического комплекса.
Технический результат – конструкция манипулятора роботизированного хирургического комплекса, сочетающая высокую жесткость конструкции и необходимую свободу хода хирургического инструмента для обеспечения динамической точности его позиционирования.
Технический результат достигается тем, что манипулятор роботизированного хирургического комплекса содержит приводной механизм, включающий приводной вал с первой осью вращения для поворота устройства вокруг продольной оси и приводной механизм, связанный посредством передаточного механизма со второй осью вращения, выполненной ниже первой оси вращения, соединенной с рычажным механизмом, включающим ведущее и ведомое звенья, при этом ведущее звено соединено с приводным механизмом посредством системы шкивов и ременных передач, а ведомое звено соединено с хирургическим инструментом, имеющим удаленный центр вращения, ведущее и ведомое звенья соединены двумя промежуточными звеньями, выполненными по типу труба в трубе, при этом ведущее звено имеет ось поворота, жестко связанную со опорным звеном, при этом на оси поворота размещены два шкива, связанные ременной передачей со шкивами, жестко установленными на внешнем промежуточном звене и один шкив, жестко закрепленный на оси, соединенный со шкивом, жестко установленным на внутреннем промежуточном звене.
Краткое описание чертежей
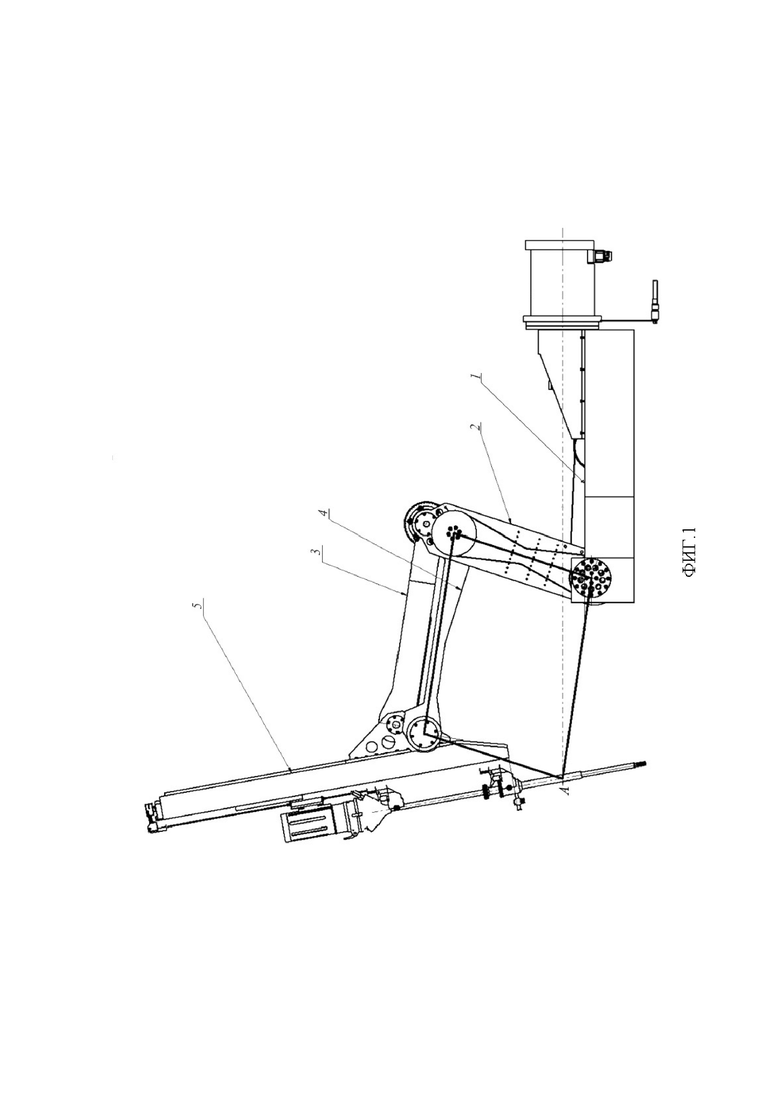
Фиг.1 – вид манипулятора сбоку;
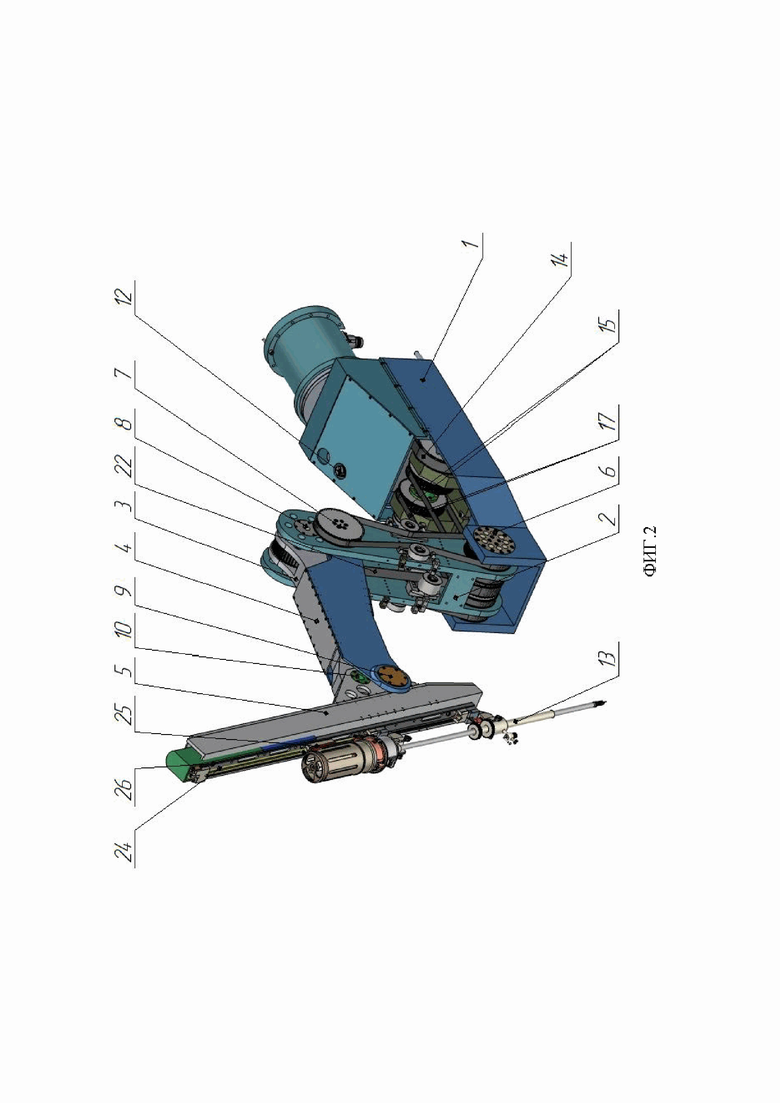
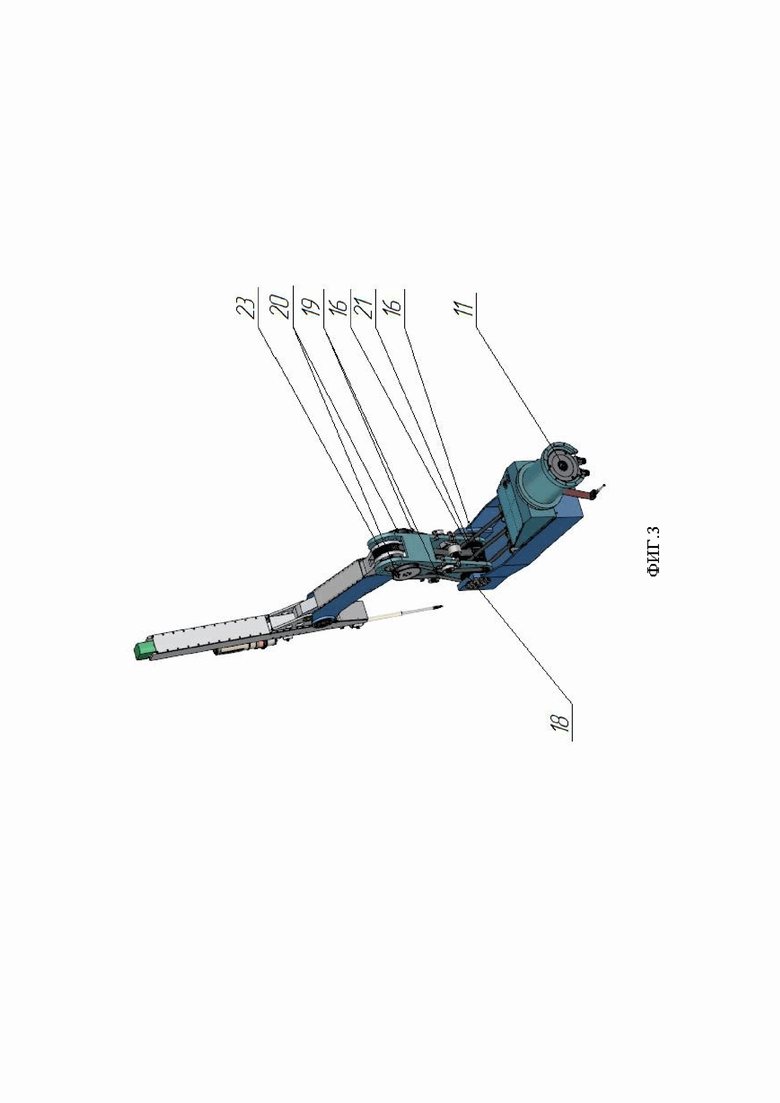
Фиг.2, 3 - общий вид манипулятора в проекции;
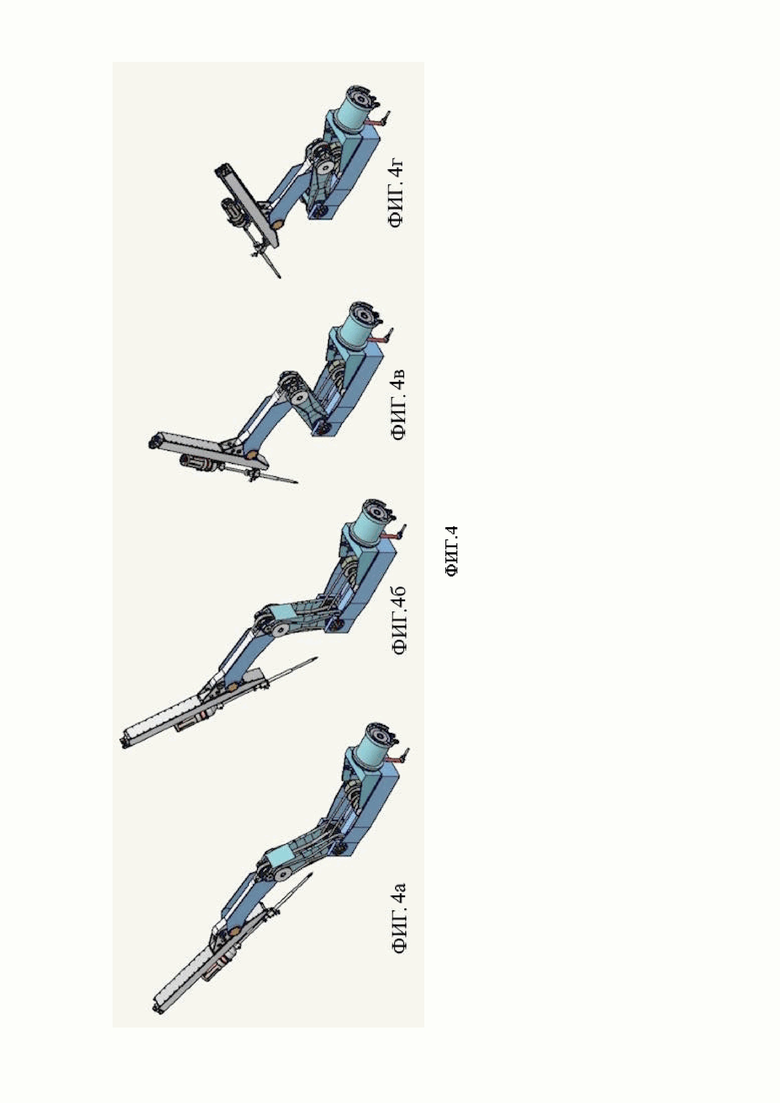
Фиг.4 (а-г) - общий вид манипулятора с различным положением рабочего инструмента.
Описание осуществления изобретения
Манипулятор устанавливается на исполнительной консоли пациента, входящей в состав роботизированного хирургического комплекса, и совершает перемещения в ответ на движение управляющего манипулятора, установленного на консоли хирурга.
В некоторых вариантах осуществления изобретения манипуляторы включают в себя сервоприводы, выполненные со встроенным электромагнитным тормозом и датчиком положения углов (энкодером). В других вариантах осуществления энкодер соединяется с двигателем посредством специального переходника.
Манипулятор роботизированного хирургического комплекса содержит рычажный механизм, соединенный с хирургическим инструментом и приводной частью.
Рычажный механизм включает жесткие звенья 1, 2, 3, 4 и 5, при этом неподвижное опорное звено 1 и ведущее звено 2 соединены между собой первой осью вращения 6 c возможностью поворота звена 2 относительно упомянутой оси вращения 6; промежуточное звено 4 соединено с ведущим звеном 2 посредством второй оси вращения 7, а промежуточное звено 3 соединено с ведущим звеном 2 посредством оси 8; ведомое звено 5 соединено с промежуточным звеном 4 посредством оси вращения 9 и с промежуточным звеном 3 посредством оси вращения 10.
Промежуточное звено 3 расположено внутри промежуточного звена 4 по типу «труба в трубе» с возможностью параллельного перемещения друг относительно друга.
Звенья рычажного механизма образуют параллелограмм, что обеспечивает ограничение перемещения хирургического инструмента относительно центра вращения А. Выполнение промежуточных звеньев 3 и 4 по типу «труба в трубе» обеспечивает жесткость системы на кручение, что позволяет повысить точность размещения хирургического инструмента в заданной точке.
Приводная часть выполнена в виде двух серводвигателей 11 и 12, при этом серводвигатель 11 обеспечивает вращение всего манипулятора совместно с хирургическим инструментом 13 относительно звена 1 вокруг оси серводвигателя 11, а серводвигатель 12 обеспечивает перемещение ведущего звена 2 рычажного механизма относительно оси 6 и синхронное перемещение ведомого звена 5 совместно с хирургическим инструментом 13, при этом угол между звеньями 2 и 5 является постоянным.
Выполнение оси серводвигателя 11 (Фиг.1) выше оси 6 позволяет улучшить сбалансированность манипулятора.
Серводвигатель 12 расположен в корпусе, при этом его выходной вал связан посредством шкивов и ременной передачи 14 с передаточным валом. На передаточном валу установлены два шкива 15, связанные со шкивами 16, установленными на оси вращения 6, посредством двух ременных передач 17. Серводвигатель 12 передает момент вращения на ось 6, посредством указанной системы шкивов. Шкивы 16 жестко связаны с ведущим звеном 2 и обеспечивают его поворот относительно оси 6.
На оси 6 также установлены шкивы 18, соединенные посредством ременных передач 19 со шкивами 20, жестко установленными на промежуточном звене 4 и шкив 21, соединенный посредством ременной передачи 22 со шкивом 23, жестко установленным на промежуточном звене 4.
Ведомое звено 5 содержит серводвигатель (не показан), соединенный посредством троса 24 с платформой 25, на которой закреплен хирургический инструмент 13, и перемещающейся по линейной направляющей 26 ведомого звена 5 для подведения хирургического инструмента к троакару и введения в него.
Манипулятор связан с цифровым блоком управления, получающим команды передаваемые оператором (хирургом) с консоли хирурга и передающим команды на включение или выключение серводвигателей манипулятора посредством микроконтроллеров.
Также цифровой блок управления предназначен для получения сигналов от микроконтроллеров о текущем положении манипулятора и передачи полученных сигналов на внешнюю систему управления роботохирургическим комплексом. Информация с каждого микроконтроллера поступает в цифровой блок управления, где осуществляется обработка данных о положении звеньев манипулятора и соответственно хирургического инструмента.
Каждый серводвигатель, входящий в состав манипулятора соединен с энкодерами, обеспечивающими измерение параметров угловых и линейных перемещений. При отклонении параметров от заложенных инструкцией микроконтроллер подает команду на соответствующий серводвигатель для осуществления корректировки параметров положения. Это позволяет исключить травмоопасность для пациента.
Описание работы устройства
Введение хирургического инструмента в троакар осуществляется после подведения хирургического инструмента к троакару системой позиционирования (рука хирургического робота). Посредством подачи сигнала со стойки хирурга осуществляют запуск электродвигателя, размещенного на ведомом звене 5 манипулятора, после чего начинается вращение закрепленного на валу барабана и осуществляется намотка/размотка связанного с ним троса 24, который обеспечивает перемещение платформы 25 с установленным на ней хирургическим инструментом 13 вдоль линейной направляющей 26, закреплённой на ведомом звене 5. Посредством указанного поступательного линейного перемещения осуществляют введение хирургического инструмента в троакар в теле пациента. Дальнейшее перемещение хирургического инструмента в теле пациента осуществляется относительно удаленного центра вращения А.
При возникновении необходимости движения манипулятора оператор с помощью блока управления манипулятором, установленного на стойке оператора, позиционирует манипулятор требуемым образом.
При подаче сигнала на включение серводвигателя 12 момент от серводвигателя 12 передается через две ременные передачи 17 на шкивы 16, жестко закрепленные на ведущем звене 2, и ось 6 с установленными шкивами 18 и шкивом 21 соответственно. От шкива 21 через ременную передачу 22 вращение передается на шкив 23, жестко соединений с промежуточным звеном 3, а от шкивов 18 посредством двух ременных передач 19 на шкивы 20, жестко закрепленные на промежуточном звене 4. При этом обеспечивается перемещение ведущего звена 2 вперед-назад с поворотом вокруг оси 6 на заданный угол и поступательное перемещение промежуточных звеньев 3 и 4, которые, толкая ведомое звено 5, приводят к синхронному перемещению хирургического инструмента установленного на ведомом звене 5 относительно центра вращения вперед-назад.
При необходимости смещения хирургического инструмента влево-вправо подается команда на включение серводвигателя 11, вращение которого обеспечивает поворот манипулятора относительно оси серводвигателя 11.
Поворот инструмента относительно его продольной оси осуществляется за счет двигателя, установленного в верхней части корпуса хирургического инструмента, команду на который также подает оператор через цифровой блок управления.
Выполнение конструкции манипулятора по типу параллелограмма, параллельные стороны (промежуточные звенья 3 и 4) которого выполнены по типу «труба в трубе» обеспечивает возможность точного позиционирования инструмента посредством удаленного управления за счет высокой жесткости конструкции. Обеспечение перемещения инструмента относительно удаленного центра вращения, а также использование энкодеров посредством которых осуществляется контроль относительных перемещений инструмента, позволяет повысить безопасность хирургического вмешательства для пациента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ведущий манипулятор роботохирургического комплекса | 2022 |
|
RU2803231C1 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| УСТРОЙСТВО УДЕРЖАНИЯ ИНСТРУМЕНТОВ ДЛЯ МАНИПУЛЯТОРА РОБОТИЗИРОВАННОЙ ХИРУРГИЧЕСКОЙ СИСТЕМЫ | 2017 |
|
RU2745880C2 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| КОНТРОЛЛЕР ЗАПЯСТЬЯ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2718568C1 |
| МЕДИЦИНСКИЙ МАНИПУЛЯТОР | 2008 |
|
RU2445933C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
Изобретение относится к области медицинского оборудования, в частности к манипуляторам хирургических роботизированных систем для минимального инвазивного вмешательства. Манипулятор содержит приводной механизм, включающий приводной вал с первой осью вращения для поворота манипулятора вокруг продольной оси, и приводной механизм, связанный посредством передаточного механизма со второй осью вращения, выполненной ниже первой оси вращения и соединенной с рычажным механизмом, включающим опорное, ведущее и ведомое звенья. При этом ведущее звено, установленное на второй оси вращения, соединено с передаточным механизмом, а ведомое звено соединено с хирургическим инструментом, имеющим удаленный центр вращения. Ведущее и ведомое звенья соединены двумя промежуточными звеньями, выполненными по типу труба в трубе. Ведущее звено связано с передаточным механизмом посредством системы шкивов и ременных передач. На второй оси вращения, жестко связанной с опорным звеном, размещены два шкива, связанные ременной передачей со шкивами, жестко установленными на внешнем промежуточном звене и один жестко закрепленный на второй оси шкив, соединенный со шкивом, жестко установленным на внутреннем промежуточном звене. Изобретение обеспечивает высокую жесткость конструкции и необходимую свободу хода хирургического инструмента для обеспечения динамической точности его позиционирования. 3 з.п. ф-лы, 4 ил.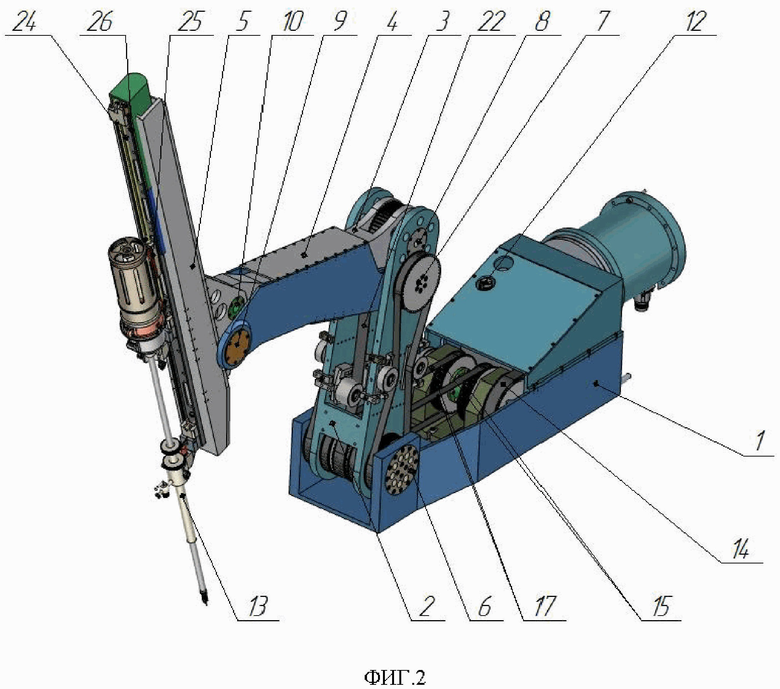
1. Манипулятор роботизированного хирургического комплекса, содержащий приводной механизм, включающий приводной вал с первой осью вращения для поворота манипулятора вокруг продольной оси, и приводной механизм, связанный посредством передаточного механизма со второй осью вращения, выполненной ниже первой оси вращения и соединенной с рычажным механизмом, включающим опорное, ведущее и ведомое звенья, при этом ведущее звено, установленное на второй оси вращения, соединено с передаточным механизмом, а ведомое звено соединено с хирургическим инструментом, имеющим удаленный центр вращения, отличающийся тем, что ведущее и ведомое звенья соединены двумя промежуточными звеньями, выполненными по типу труба в трубе, ведущее звено связано с передаточным механизмом посредством системы шкивов и ременных передач, на второй оси вращения, жестко связанной с опорным звеном, размещены два шкива, связанные ременной передачей со шкивами, жестко установленными на внешнем промежуточном звене и один жестко закрепленный на второй оси шкив, соединенный со шкивом, жестко установленным на внутреннем промежуточном звене.
2. Манипулятор по п.1, отличающийся тем, что выходной вал приводного механизма, соединенного с рычажным механизмом и выполненного в виде серводвигателя, связан посредством системы шкивов и ременной передачей с передаточным валом.
3. Манипулятор по п.1, отличающийся тем, что приводные механизмы выполнены в виде серводвигателей.
4. Манипулятор по п.1, отличающийся тем, что приводные механизмы соединены с энкодерами.
| WO 2008157225 A1, 24.12.2008 | |||
| WO 2014146120 A1, 18.09.2014 | |||
| WO 2013181522 A1, 05.12.2013 | |||
| CN 101443162 B, 07.09.2011 | |||
| US 10299883 B2, 28.05.2019 | |||
| СПОСОБ ПОЛУЧЕНИЯ ТРАНСПОРТНОЙ РИБОНУКЛЕИНОВОЙКИСЛОТЫ | 0 |
|
SU187033A1 |

