Область изобретения
Изобретение относится к устройству удержания инструментов для манипулятора роботизированной хирургической системы. Это устройство содержит трехзвенный рычаг в качестве концевого элемента открытой кинематической цепи с первым, вторым и третьим рычажными звеньями. При этом манипулятор представляет собой ту часть роботизированной системы, которая имеет возможность физического взаимодействия с окружающей ее средой, то есть подвижную часть системы. Под этим, как правило, подразумевают многозвенную систему, в которой отдельные звенья, в дальнейшем изложении обозначаемые ради наглядности также как рычажные звенья, соединены друг с другом посредством шарниров. Часть звеньев служит для позиционирования манипулятора относительно других манипуляторов той же роботизированной системы таким образом, что они взаимно не препятствуют друг другу, и в дальнейшем изложении эта часть обозначена также как установочное устройство. Другая часть звеньев, в данном случае - устройство удержания инструментов, служит для позиционирования рабочего органа на объекте, то есть, например, для позиционирования хирургического инструмента или эндоскопа в области отверстия тканевого покрова пациента, например брюшной стенки, для минимально-инвазивной операции. При этом рычажные звенья соединены друг с другом как открытая кинематическая цепь, поскольку на последнем звене отсутствует какой-либо последующий шарнир, но имеется рабочий орган, а все другие звенья соединены друг с другом в виде цепи. На концах каждого рычажного звена в пределах цепи имеется шарнир, поэтому каждое рычажное звено содержит два шарнира, и посредством шарниров рычажные звенья соединены с другими рычажными звеньями. При этом шарнир соединяет в точности два звена. Шарниры обеспечивают возможность ограниченного перемещения звеньев друг относительно друга в соответствии с имеющимися у шарнира степенями свободы, причем на одном звене могут быть выполнены несколько шарниров. Кроме того, два звена также могут быть соединены посредством большего, чем один числа шарниров. Шарниры могут быть либо активными, то есть с приводом от двигателя, либо пассивными, то есть свободноподвижными.
Упомянутый ранее трехзвенный рычаг образует в манипуляторе ответственную за позиционирование инструмента часть. Поэтому устройство удержания инструментов содержит, прежде всего, сопряжение для соединения первого рычажного звена с манипулятором, то есть с установочным устройством манипулятора. Это соединение производят посредством сопрягающего поворотного шарнира. Под поворотным шарниром при этом понимают шарнир с осью вращения, в котором ось вращения образует прямой угол с осями обоих присоединенных рычажных звеньев. При этом ось звена расположена в его продольном направлении, то есть вдоль направления, в котором звено соединяет два шарнира или же, для конечного рычажного звена, между открытым концом и шарниром. В противоположность поворотному шарниру, в торсионном шарнире ось вращения простирается параллельно осям обоих рычажных звеньев, а в револьверном шарнире продольная ось одного звена простирается параллельно оси вращения, а продольная ось другого звена, как правило, исходного звена, расположена под прямым углом к оси вращения. Под сопрягающим поворотным шарниром подразумевают поворотный шарнир, в котором ось вращения образует прямой угол с осями обоих присоединенных звеньев. Первое рычажное звено соединено со вторым рычажным звеном посредством торсионного шарнира. Второе и третье рычажные звенья соединены друг с другом посредством первого поворотного шарнира, а третье рычажное звено с держателем инструмента, который имеет функцию четвертого рычажного звена и образует конец кинематической цепи как таковой, соединено посредством поступательного шарнира, то есть третье рычажное звено и держатель инструмента являются подвижными друг относительно друга вдоль оси сдвига, которая в данном случае совпадает с продольной осью третьего рычажного звена. Держатель инструмента служит для размещения хирургического инструмента с продольной осью инструмента. Ось вращения первого поворотного шарнира расположена перпендикулярно оси вращения торсионного шарнира.
При этом понятие продольной оси инструмента следует понимать указанным ниже образом. При минимально-инвазивной хирургии посредством роботизированной системы, необходимые для операции инструменты, например щипцы, ножницы или иглодержатели, направляют посредством хвостового механизма с помощью хвостовиков инструментов. Для наблюдения за операционной областью внутри тела применяют стержневые системы камер и эндоскопы с хвостовиками эндоскопов. Поэтому продольная ось инструмента, в большинстве случаев, соответствует продольной оси таких цилиндрических инструментов или же хвостовиков эндоскопов.
Наконец, устройство удержания инструментов содержит также систему управления с приводами для торсионного шарнира, первого поворотного шарнира и поступательного шарнира для перемещения друг относительно друга рычажных звеньев и держателя инструмента. То есть, под этими шарнирами подразумевают активные шарниры. Под поступательным шарниром, называемым также линейным шарниром, скользящим шарниром или призматическим шарниром, понимают шарнир, который осуществляет скользящее или поступательное перемещение вдоль продольной оси рычажного звена.
При минимально-инвазивной хирургии посредством роботизированных хирургических систем обычно производимое вручную направление подходящих для минимально-инвазивной хирургии инструментов заменяют моторизованным позиционированием, причем позиционирование и операцию выполняют вручную силами оператора. При операциях во внутренней части тела хвостовики инструментов, в дальнейшем изложении обобщенно обозначенные также как инструменты, направляют во внутреннюю часть пациента посредством одного или нескольких троакаров. При этом под троакаром понимают инструмент, с помощью которого хирург, в рамках минимально-инвазивной операционной технологии, получает доступ к полости тела, такой как, например, брюшная полость. Причем троакар имеет, как правило, режущие кромки для получения доступа посредством разделения острым путем или тупую коническую вершину для разделения тупым путем. Режущие кромки или же вершина образуют передний конец стилета, который расположен в канюле. Наконечник троакара запирает отверстие канюли. Канюлю совместно с троакаром вводят в соответствующую полость тела, затем троакар извлекают из канюли, и в теле остается только канюля, через которую направляют хвостовики инструментов. В понятие троакара в дальнейшем изложении входит, прежде всего, также его канюля, которая имеет существенное значение для позиционирования хирургического инструмента в случае его применения.
В принципе, хирургический инструмент может быть перемещен и позиционирован с помощью манипулятора произвольным образом во всех трех направлениях в пространстве, однако, как правило, инструменты, с канюлей или без нее, направляют таким образом, что в одной точке тканевого покрова возможность выполнения боковых перемещений хвостовиков инструментов либо вовсе отсутствует, либо имеется только в минимальной степени. Эту точку обозначают как точка поворота, исходная точка или точка вращения. Логика управления роботизированной хирургической системы должна быть осведомлена о точке поворота, или же точка поворота должна быть задана посредством конструктивного выполнения механики перемещения, что обеспечивает ограничение перемещения инструмента таким образом, что биомеханическая нагрузка на ткань в окрестности канюли или же точки пересечения ткани является по возможности малой. В точке поворота, которая в идеальном случае расположена в точке пересечения троакаром тканевого покрова пациента или поблизости от этой точки пересечения, боковые перемещения параллельно поверхности тканевой покрова должны быть исключены для предотвращения нарушений тканевого покрова обусловленным конструкцией и/или управлением способом. Поэтому для ориентации инструмента, дополнительно к вращению вокруг продольной оси инструмента, в этой точке хвостовики инструментов могут быть повернуты только вокруг нормали к тканевому покрову, и могут быть перемещены в направлении нормали.
Уровень техники
Из уровня техники известны различные устройства удержания инструментов или же соответствующие манипуляторы с держателями инструментов для роботизированных хирургических систем. В ЕР 2332484 А2 описан манипуляционный узел для минимально-инвазивной хирургии, который содержит многозвенный рычаг, на конце которого расположен держатель инструмента, который посредством поступательного шарнира, обозначаемого также как линейный шарнир, имеет возможность перемещения вдоль продольной оси инструмента в вертикальном направлении. Он соединен посредством поворотного шарнира со следующим рычажным звеном, которое, со своей стороны, соединено посредством торсионного шарнира с другим рычажным звеном. Ось держателя инструмента в данном случае совпадает с продольной осью инструмента или же простирается параллельно ей. Линейный шарнир обеспечивает держателю инструмента возможность перемещения вдоль его продольной оси. С целью блокировки в точке поворота или же в тканевом покрове перпендикулярных продольной оси инструмента боковых усилий, необходимым является использование комплексных компенсирующих перемещений всего рычага для перестановки инструмента для поворотного перемещения, что обеспечивает удержание инструмента в тканевой покрове в предварительно заданном положении. При применении нескольких манипуляторов, при определенных обстоятельствах, достаточная свобода передвижений отсутствует таким образом, что имеется опасность столкновений между манипуляторами. Посредством активной связи между креплением инструмента или же троакаром и манипулятором, положение точки поворота всегда задано принудительным образом.
Эти недостатки частично устранены посредством описанного в WO 2014/094716 устройства. В данном случае реализовано разобщение продольной оси инструмента от оси, вдоль которой производится телескопическая перестановка, вследствие чего, уменьшено необходимое для перемещения с целью позиционирования инструмента пространство, и уменьшена опасность столкновения. Для установки применяют, с одной стороны, телескопическую направляющую с механизмом тросового привода, и с другой стороны, соединительный механизм с шестью опорами, то есть механизм с двойной связью. Прежде всего, механизм с двойной связью имеет сложную конструкцию и поэтому является относительно подверженным повреждениям. Кроме того, совместно с телескопической направляющей, он занимает действительно большое место.
Описание изобретения
Поэтому целью изобретения является дальнейшее усовершенствование устройства удержания инструментов описанной ранее разновидности в тех отношениях, что оно является, с одной стороны, по возможности более устойчивым, то есть выполнено в малой степени подверженным повреждениям, с другой стороны, имеет по возможности малые размеры, что обеспечивает увеличение подвижности и, кроме того, минимизирует, при соединении с другими манипуляторами, опасность столкновения при перемещении манипуляторов для установки рабочего положения и т.д. таким образом, что достигается большая свобода при установке.
Эта цель достигнута устройством удержания инструментов описанной ранее разновидности посредством того, что держатель инструмента соединен с третьим рычажным звеном не только посредством поступательного шарнира, но и посредством второго, пассивного, поворотного шарнира, вокруг оси которого держатель инструмента имеет возможность свободного вращения, то есть для перемещения вокруг этого шарнира не используют управление посредством привода. Оси вращения первого и второго поворотных шарниров расположены параллельно друг другу. Предпочтительно, второй поворотный шарнир расположен между поступательным шарниром и держателем инструмента, при этом он может быть размещен, например, на соответствующем ползуне, с которым соединен держатель инструмента и который перемещает держатель инструмента. В принципе, также является возможным, хотя и более дорогостоящим по конструктивно-техническим причинам, размещение, прежде всего, второго, пассивного поворотного шарнира на третьем рычажном звене, и соединение с ним поступательного шарнира с держателем инструмента, что, в конечном счете, обеспечивает достижение той же кинематики. Существенным является то обстоятельство, что третье рычажное звено с держателем инструмента соединено не только посредством поступательного шарнира, но и посредством второго, пассивного, поворотного шарнира, то есть посредством двух шарниров. Тем самым, продольная ось инструмента является направляемой через точку поворота с возможностью свободного поворота в ней, расположенную на оси вращения торсионного шарнира, в продолжение наружу второго рычажного звена. В отличие от уровня техники, точка поворота расположена не на продольной оси или на продлении продольной оси третьего рычажного звена, но со смещением, на оси вращения торсионного шарнира, однако, вне второго рычажного звена и первого поворотного шарнира, то есть на продлении оси вращения торсионного шарнира. В то время как при перестановке устройства удержания инструментов продольное смещение компенсируют посредством оси поступательного шарнира, то есть оси смещения, второй поворотный шарнир служит для обеспечения возможности направления инструмента, то есть хвостовика инструмента в точку поворота без принуждения, то есть в отсутствии стремления со стороны инструмента к изменению его положения в плоскости, которая задана посредством ткани вокруг телесного отверстия, и путем выполнения только поворотных перемещений вокруг точки поворота. В районе отверстия на тканевой покров, например брюшную стенку, пациента в этой плоскости не действуют никакие боковые усилия. Во время функционирования, через эту точку поворота направлен инструмент, то есть продольная ось инструмента. Кроме поворотного перемещения, само собой разумеется, также являются возможными перемещения инструмента вдоль продольной оси инструмента, а также вращения вокруг продольной оси инструмента.
В то время как в известных из уровня техники устройствах удержания инструментов инструмент всегда принудительно направлен посредством специальной кинематики привода с двойной связью вокруг точки поворота, что может повлечь, при неправильном системном устройстве, у пациентов с очень толстыми слоями ткани, например на животе, или при происходящих тем временем смещениях пациента, к значительным нагрузкам на ткань, в устройстве удержания инструментов согласно изобретению изменения положения точки поворота, то есть точки, в которой инструмент проходит сквозь ткань, уравновешены пассивным и/или эластичным образом.
В принципе, для направления инструмента, то есть хвостовика инструмента, не является необходимым какое-либо особое устройство. Телесное отверстие, при необходимости, со вставленной в него канюлей троакара в качестве точки опоры и направления, является достаточным, если положение тканевого покрова и отверстия допускает его использование для задания точки поворота. В случаях, когда не является возможным образование такой исходной точки посредством тканевого покрова тела пациента, выгодной является реализация точки поворота другим механическим способом. С этой целью на втором рычажном звене в области первого поворотного шарнира вдоль продолжения оси вращения торсионного шарнира расположено крепление троакара, которое выполнено для установки троакара с возможностью поворота вокруг оси вращения, параллельной оси вращения первого поворотного шарнира. Крепление может быть выполнено, например, вилкообразным, и канюля троакара может быть защемлена в этом креплении или с возможностью поворота привинчена к нему, что составляет только две примерных возможности реализации монтажа. В этом случае, точка поворота является точкой пересечения оси вращения торсионного шарнира с осью вращения. Применение крепления троакара является, прежде всего, выгодным в случае, например, выполнения открытых операций, когда отсутствует какой-либо тканевой покров, с помощью которого можно задавать точку поворота. Кроме того, крепление троакара может находить применение также в качестве вспомогательного средства для прицеливания, с целью приспособления, например, устройства удержания инструментов для базового позиционирования относительно пациента без применения троакара во время операции.
В данном случае вместо известной из уровня техники двойной связи применен поступательный шарнир в комбинации со свободным поворотным шарниром, причем поступательный шарнир может быть выполнен, например, в виде линейной направляющей с ременным и/или винтовым механизмом подачи, что делает возможным компактную конструктивную форму и устойчивую против внешних механических воздействий конструкцию. Положение поступательного шарнира вдоль оси поступательного шарнира, то есть оси, вдоль которой происходит перемещение, выгодным образом является устанавливаемым посредством относительного энкодера, а также расположенных вдоль оси поступательного шарнира датчиков опорного положения. Тем самым, конструктивная форма может быть поддержана особо компактной, и посредством того, что в области, в которой происходит смещение, расположены различные переключатели опорного сигнала, имеется возможность уменьшения до минимума привязки по опорному сигналу после включения.
Наконец, держатель инструмента может быть разными способами соединен с третьим рычажным звеном или же с его толкателем. Например, может быть применен чисто механический фиксирующий механизм, что делает возможной быструю замену держателя инструмента, когда, например, должны быть заменены два инструмента. В этот фиксирующий механизм могут быть встроены электрические или же электромагнитные контакты для управления инструментом, однако, сигналы управления могут быть переданы посредством радиосигнала.
Подразумевается, что указанные выше и дополнительно разъясненные ниже признаки применимы не только в предоставленных комбинациях, но и в других комбинациях или по отдельности без выхода за пределы данного изобретения.
Краткое описание чертежей
В последующем изложении изобретение разъяснено еще более подробно, например, посредством приложенных чертежей, которые раскрывают также существенные признаки изобретения. Показано на:
Фиг. 1 - манипулятор роботизированной хирургической системы на общем виде,
Фиг. 2 - кинематика данного манипулятора,
Фиг. 3А, Б - устройство удержания инструментов в двух различных установках на виде сбоку,
Фиг. 4А, Б - устройство удержания инструментов в двух различных установках на виде с другой стороны,
Фиг. 5 - устройство удержания инструментов с присоединенным держателем инструмента,
Фиг. 6А, Б, В - другой вариант осуществления устройства удержания инструментов с держателем инструмента,
Фиг. 7А, Б - устройство удержания инструментов с другим держателем инструмента.
Подробное описание чертежей
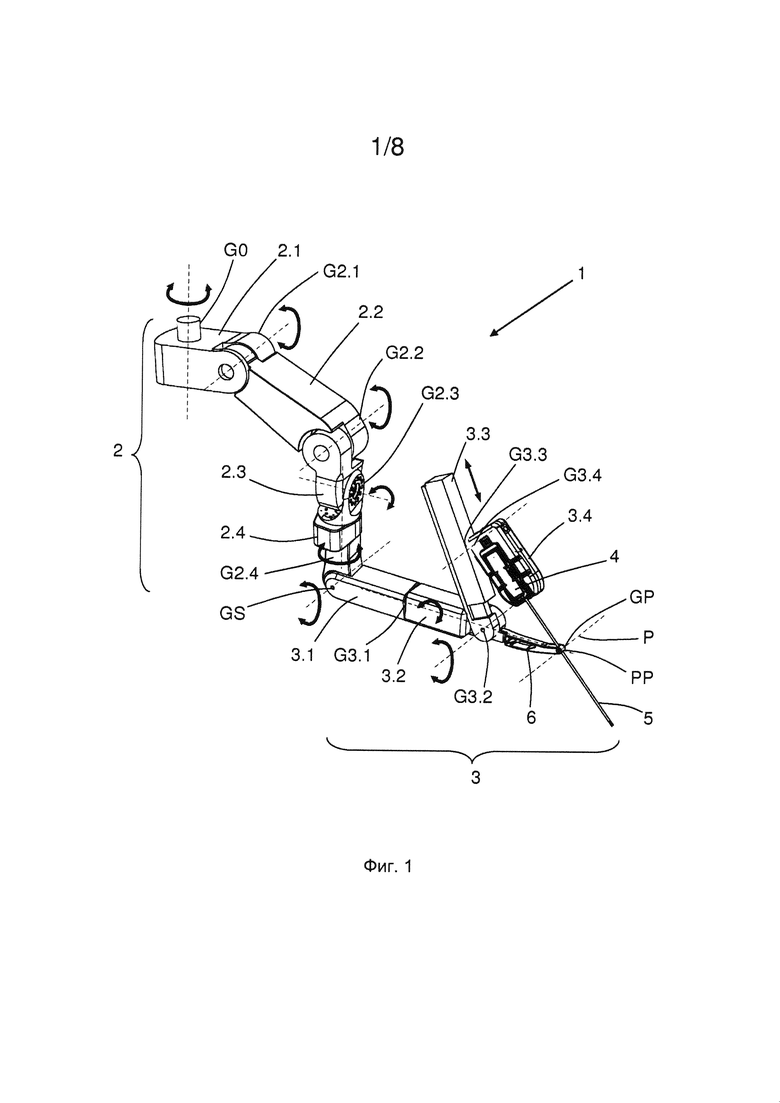
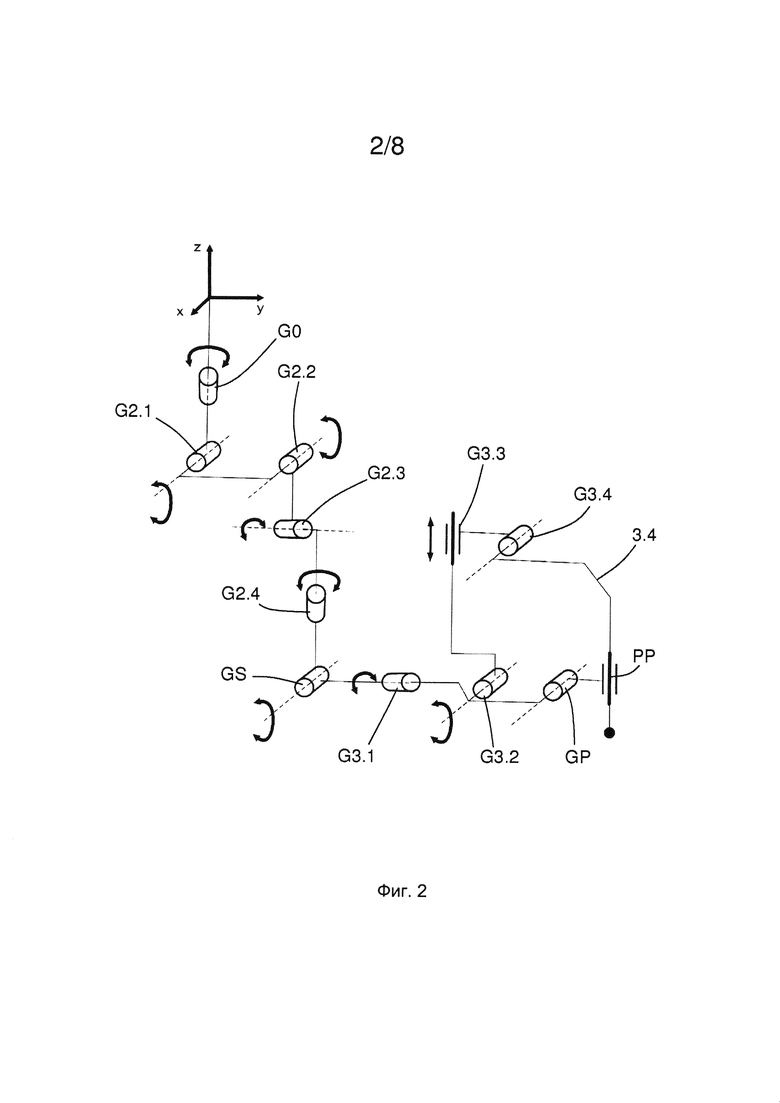
Фиг. 1 показывает манипулятор 1 роботизированной хирургической системы, а фиг.2 - кинематические отношения в манипуляторе 1. Роботизированная хирургическая система содержит, как правило, несколько манипуляторов, например четыре или шесть. Манипулятор 1 состоит из установочного устройства 2 и устройства 3 удержания инструментов. Установочное устройство 2 служит для позиционирования устройства 3 удержания инструментов в связи с другими манипуляторами таким образом, что устройства удержания инструментов различных манипуляторов не препятствуют друг другу при проведении операции. Положение инструмента на устройстве 3 удержания инструментов устанавливают во время операции и для операции. Как правило, установочное устройство 2 сохраняет во время операции свое положение. Установочное устройство 2 состоит из нескольких установочных рычажных звеньев 2.1, 2.2, 2.3 и 2.4. Установочное рычажное звено 2.1 соединено посредством шарнирного соединения G0 с остальной, как правило, неподвижной частью роботизированной хирургической системы, причем совокупная система как таковая, при необходимости, может быть перемещена. Посредством приводных и управляемых шарниров G2.1, G2.2, G2.3 и G2.4 звенья установочного устройства 2, то есть установочные рычажные звенья 2.1-2.4 могут быть перемещены друг относительно друга.
В свою очередь, устройство 3 удержания инструментов содержит трехзвенный рычаг в качестве концевого элемента открытой кинематической цепи с первым рычажным звеном 3.1, вторым рычажным звеном 3.2 и третьим рычажным звеном 3.3. Первое, проксимальное рычажное звено 3.1 соединено с манипулятором 1, то есть с установочным устройством 2 манипулятора 1, посредством устройства сопряжения. Электрические контакты для управления также выполнены посредством устройства сопряжения в том случае, когда управление производят не по радио. Кроме того, устройство сопряжения содержит сопрягающий поворотный шарнир GS, ось вращения которого тем самым является перпендикулярной продольным осям первого рычажного звена 3.1 и расположенного ближе всего к первому рычажному звену установочному рычажному звену 2.4. Первое рычажное звено 3.1 устройства 3 удержания инструментов соединено со вторым рычажным звеном 3.2 посредством торсионного шарнира G3.1. Диапазон перемещения торсионного шарнира G3.1 расположен, например, в диапазоне ±120°, предпочтительно ±100°, вокруг нулевого положения или же нормального положения. Второе рычажное звено 3.2 соединено с третьим, дистальным рычажным звеном 3.3 посредством первого поворотного шарнира G3.2, диапазон перемещения которого расположен, например, между -40° и +90°, предпочтительно между -30° и +70°, вокруг нулевого положения или же нормального положения. В нормальном положении торсионного шарнира G3.1 оси вращения сопрягающего поворотного шарнира GS и первого поворотного шарнира G3.2 расположены параллельно друг другу. В нормальном положении первого поворотного шарнира третье рычажное звено 3.3 или же его продольная ось расположено(-а) перпендикулярно оси вращения торсионного шарнира G3.1 и оси вращения первого поворотного шарнира G3.2. В свою очередь, третье рычажное звено 3.3 соединено посредством поступательного шарнира G3.3 с держателем 3.4 инструмента. Держатель 3.4 инструмента должен передвигаться в диапазоне длин по меньшей мере 30 см, предпочтительно по меньшей мере 44 см, причем этот диапазон длин масштабирован с общей величиной хирургической системы. Вышеупомянутое указание относится к системам минимально-инвазивных воздействий в человеческом теле. Держатель 3.4 инструмента служит для размещения хирургического инструмента, который содержит головку 4 инструмента и хвостовик 5 инструмента. Под хирургическим инструментом следует также понимать эндоскоп, который применяют в хирургии для наблюдения. В головке 4 инструмента размещены элементы управления и часть механической системы для перемещения частей инструментов. Как правило, хвостовики 5 инструментов вводят в тело через искусственно выполненное телесное отверстие в тканевом покрове пациента, например в брюшной стенке. Хвостовик 5 инструмента одновременно задает продольную ось I инструмента, которая показана, например, на неперспективных чертежах на фиг.5 и 7А, то есть продольная ось I инструмента соответствует оси симметрии хвостовика 5 инструмента, например, в цилиндрических хвостовиках. Под хирургическим инструментом при этом подразумевают не только ножницы, иглы, и т.д., но и приборы для наблюдения за оперируемой областью, такие как, например, эндоскопы и соответствующий держатель 3.4 инструмента для такого эндоскопа 18 с хвостовиком 19 эндоскопа, показанный, например, на фиг.7А, Б.
Кроме того, устройство для поддержки 3 инструментов имеет непоказанную систему управления с приводами для торсионного шарнира G3.1, первого поворотного шарнира G3.2 и поступательного шарнира G3.3 для перемещения трех рычажных звеньев 3.1, 3,2 и 3.3 и держателя 3.4 инструмента друг относительно друга.
Особенностью показанного устройства 3 удержания инструментов является соединение держателя 3.4 инструмента с третьим рычажным звеном 3.3 не исключительно посредством приводного поступательного шарнира G3.3, но также дополнительно, еще и посредством второго поворотного шарнира G3.4. При этом под вторым поворотным шарниром G3.4 подразумевают пассивный шарнир, то есть не перемещаемый с помощью привода или системы управления, но имеющий возможность, в принципе, свободного вращения вокруг оси вращения шарнира в пределах конкретных, конструктивно обусловленных границ. Диапазон перемещения или же угол качания второго поворотного шарнира G3.4 составляет, например, примерно ±9° от среднего положения. Оси вращения всех шарниров отмечены на фиг.1 и 2 посредством пунктирных линий, возможности вращения и продольного перемещения для приводных шарниров - посредством соответствующих двойных стрелок. Держатель 3.4 инструмента соединен с третьим рычажным звеном 3.3 посредством двух шарниров, с одной стороны, посредством поступательного шарнира G3.3, и с другой стороны, посредством второго поворотного шарнира G3.4.
Оси вращения первого поворотного шарнира G3.2 и второго поворотного шарнира G3.4 расположены параллельно друг другу. Тем самым, продольная ось I инструмента, представленная также посредством хвостовика 5 инструмента, является свободно направляемой через точку РР поворота с возможностью свободного поворота в ней, расположенную не на первом поворотном шарнире G3.2 или на продольной оси третьего рычажного звена 3.3, а на оси вращения торсионного шарнира G3.1, в продолжение наружу второго рычажного звена 3.2. За счет этого положение продольной оси I инструмента или же хвостовика 5 инструмента является частично разобщенным от положения продольной оси рычажного звена 3.3, а ось вращения первого поворотного шарнира G3.2 не простирается через точку РР поворота. Продольное смещение компенсировано посредством оси сдвига, то есть продольной оси рычажного звена 3.3, а направление инструмента с возможностью свободного поворота в точке поворота является возможным за счет свободного вращательного перемещения между держателем 3.4 инструмента и третьим рычажным звеном 3.3 посредством второго поворотного шарнира G3.4. Держатель 3.4 инструмента, который также может быть обозначен как четвертое рычажное звено, соединен с третьим рычажным звеном посредством двух шарниров, поступательного шарнира G3.3 и второго поворотного шарнира G3.4. Эта конструкция обеспечивает компактную конструктивную форму, которая обходится, кроме того, немногочисленными и сконструированными устойчивыми шарнирами. Этим увеличена устойчивость всей хирургической системы. Поскольку точка РР поворота не расположена непосредственно на устройстве удержания инструментов, для реализации требуемых возможностей позиционирования является необходимым меньшее количество перестановочных перемещений, равно как является менее значительным и необходимое для этого место. Кроме того, опасность столкновения с другими манипуляторами роботизированной хирургической системы уменьшена до минимума. Точка РР поворота расположена на продлении оси вращения торсионного шарнира G3.1, в существенной степени за пределами держателя инструмента. Обычный минимальный зазор между устройством 3 удержания инструментов и точкой РР поворота вдоль оси вращения торсионного шарнира G3.1 должен составлять примерно 10 см.
Для направления инструмента в точке РР поворота, как правило, не являются необходимыми какие-либо другие вспомогательные средства, когда точка РР поворота может быть задана, например, посредством телесного отверстия в тканевом покрове, таком как брюшная стенка. В заданной брюшной стенкой или же тканевым покровом плоскости при операции не производится каких-либо боковых перемещений посредством хвостовика инструмента. В ситуациях, когда такая точка РР поворота не может быть задана посредством соответствующего тканевого покрова, является выгодным, когда на втором рычажном звене 3.2 в области первого поворотного шарнира G3.2, вдоль продолжения оси вращения торсионного шарнира G3.1, отмеченного посредством пунктирной линии, которая простирается вдоль продольной оси первого рычажного звена 3.1 и второго рычажного звена 3.2 и на которой расположена точка РР поворота, расположено крепление 6 троакара. Оно выполнено для установки троакара с возможностью вращения вокруг оси Ρ вращения, параллельной оси вращения первого поворотного шарнира G3.2. Это крепление 6 троакара может насажено, например, на соответствующий адаптер, который выполнен на конце второго рычажного звена 3.2, и зафиксировано с помощью фиксирующего соединения в насаженном положении. Также и другие соединения предполагается возможными, например, соединение из втулки и штекера или болтовое соединение. Соединение является соединением с силовым и/или геометрическим замыканием. В данном случае хвостовик 5 инструмента направлен посредством соответствующего монтажа на оси Ρ вращения. Тем не менее, этот монтаж не должен предусматривать удержания с силовым замыканием хвостовика 5 инструмента, поскольку он должен быть удержан с сохранением его подвижности вдоль продольной оси. Например, в качестве поворотной опоры GP может быть предусмотрен свободный шарнир, который имеет сквозную расточку, через которую может быть направлен хвостовик 5 инструмента.
Кинематические отношения конкретно представлены на фиг.2. Приводные шарниры отмечены посредством соответствующих двойных стрелок. Неприводными являются второй поворотный шарнир G3.4, поворотная опора GP и направляющая хвостовика 5 инструмента через точку РР поворота. Данное перемещение обеспечено посредством поступательного шарнира G3.3 в сочетании со вторым поворотным шарниром G3.4.
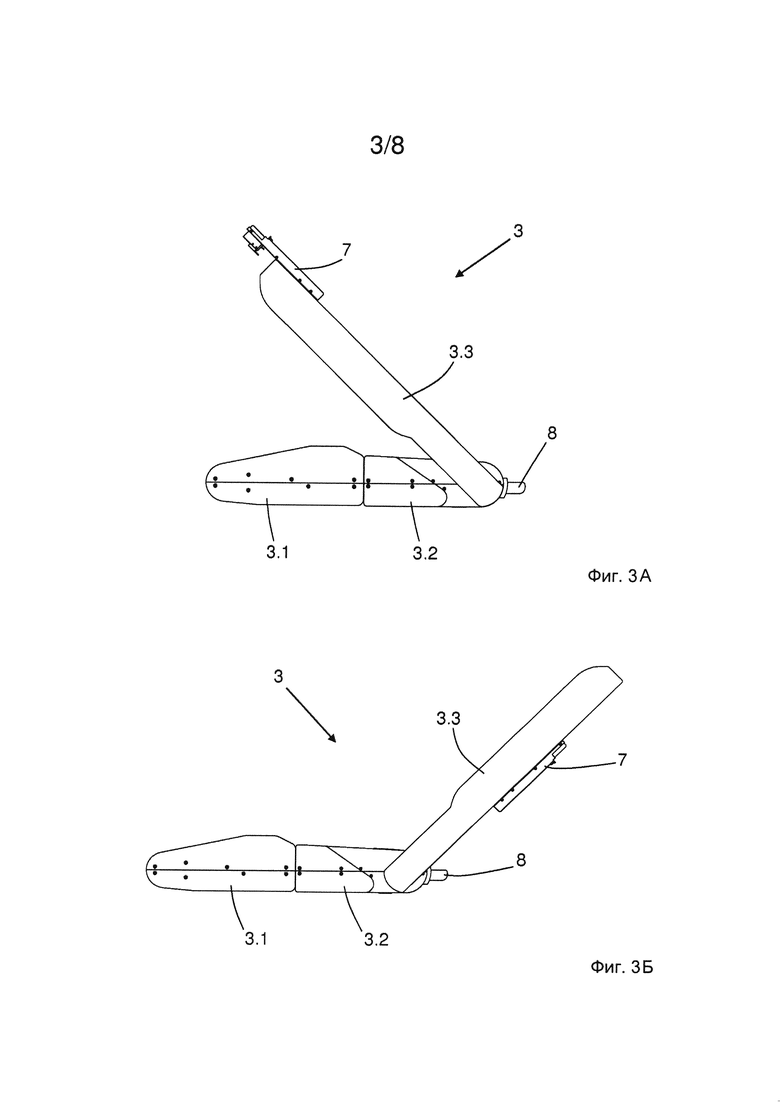
Фиг. 3А и 3Б показывают устройство 3 удержания инструментов, при этом, без держателей 3.4 инструментов, в двух различных положениях третьего рычажного звена 3.3. На фиг.3А показано отрицательное отклонение, а на фиг.3Б - положительное отклонение первого поворотного шарнира G3.2. Угловое смещение третьего рычажного звена 3.3 сопряжено с перестановкой поступательного шарнира G3.3. Этот поступательный шарнир G3.3 направляет ползун 7, на котором держатель 3.4 инструмента может расположен или же с которым он может быть соединен. Второй поворотный шарнир G3.2 выполнен не на ползуне 7, но на держателе 3.4 инструмента, однако, в рамках конструктивного видоизменения, он может быть также выполнен непосредственно на ползуне 7. Кроме того, на продолжении второго рычажного звена 3.2, на обращенной от первого рычажного звена 3.1 стороне представлен адаптер 8 для соединения с креплением 6 троакара.
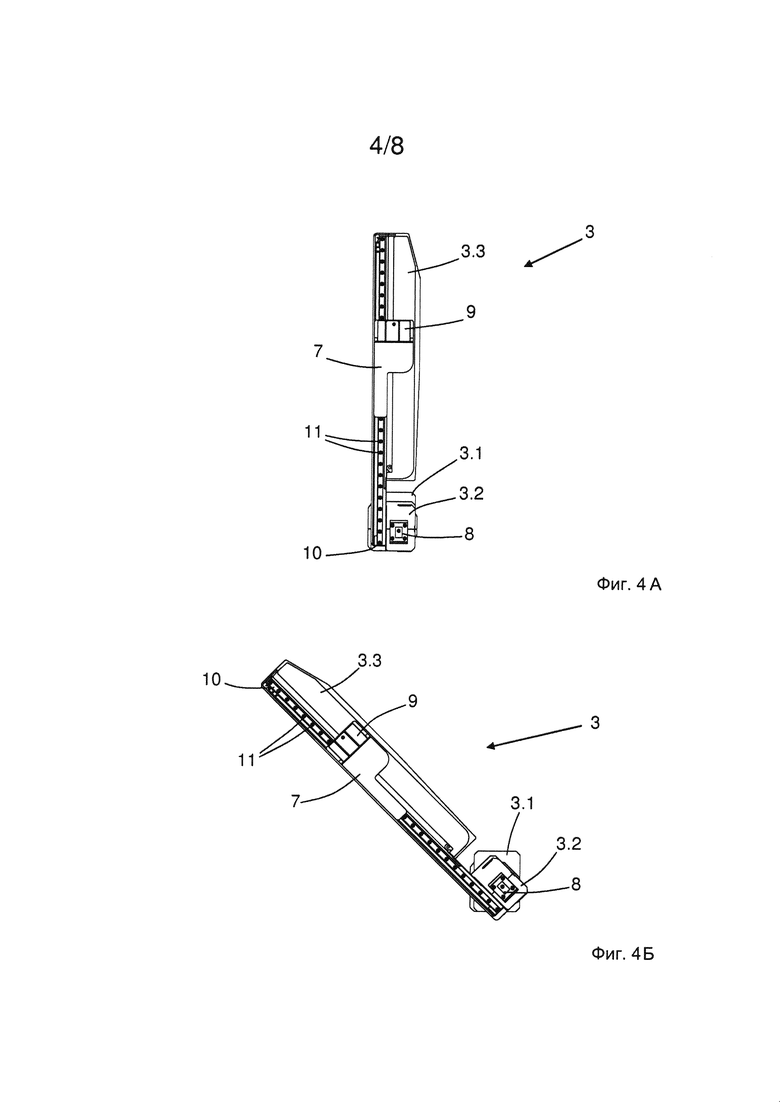
Фиг. 4А и 4Б показывают устройство 3 удержания инструментов на другом виде, на котором подробно представлено третье рычажное звено 3.3. На фиг.4А торсионный шарнир G3.1 и, тем самым, второе рычажное звено 3.2 находятся в нормальном положении, обозначаемом также как нулевое положение, по отношению к скручиванию относительно первого рычажного звена 3.1, то есть оси вращения сопрягающего поворотного шарнира GS и первого поворотного шарнира G3.2 расположены параллельно друг другу. На фиг.4Б второе рычажное звено 3.2 находится в другом положении по отношению к положению на фиг.4а, и таким образом, также по отношению к неперемещенному относительно второго рычажного звена 3.2 третьему рычажному звену 3.3. Также в данном случае не показано представление держателя 3.4 инструмента. Предпочтительно, поступательный шарнир выполнен в виде линейной направляющей 10 с винтовым приводом и/или ременной передачей. Такая конструкция является весьма устойчивой. Положение ползуна 7 вдоль оси поступательного шарнира, соответственно, продольной оси третьего рычажного звена 3.3 и параллельно линейной направляющей 10, является устанавливаемым посредством относительного энкодера. Для этого вдоль оси поступательного шарнира расположены датчики 11 опорного положения. Ползун 7 перемещают посредством привода в линейной направляющей 10 вдоль продольной протяженности третьего рычажного звена 3.3. Кроме того, на ползуне 7 расположен присоединитель 9 инструмента, к которому может быть присоединен держатель 3.4 инструмента.
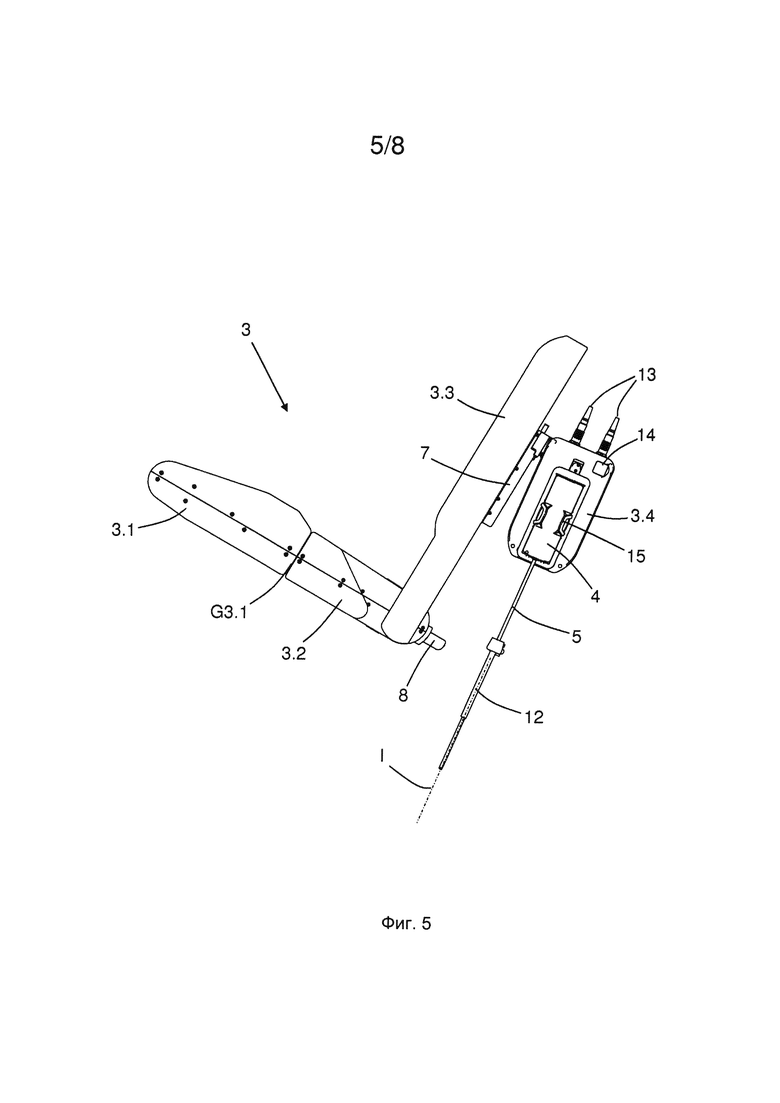
Устройство 3 удержания инструментов с присоединенным держателем 3.4 инструмента и с принятым в нем инструментом представлено на фиг.5. Третье рычажное звено 3.3 или же первый поворотный шарнир G3.2 находятся в данном случае в нормальном положении. Хвостовик 5 инструмента направлен через троакар, выражаясь точнее - через канюлю 12 троакара. Он введен в тканевой покров. В этом случае, отсутствует потребность в адаптере 8. Сигналы управления для инструмента передают посредством антенн 13. Для этого на ползуне 7 могут быть расположены малоразмерные передатчики для передачи сигналов по радио. Передача сигналов по радио является выгодной, поскольку, в противном случае, необходимым является использование проводов, механическая прочность которых подвергается испытанию в результате угловых смещений вокруг оси вращения второго поворотного шарнира G3.4, что приводит к их интенсивному износу. Кроме того, в держателе 3.4 инструмента расположен контактный щуп 14. Он может быть выполнен, например, в виде механического контактного щупа для освобождения головки инструментов 4 из держателя 3.4 инструмента, которая удержана в нем в заданном положении посредством фиксирующего механизма 15, или также для освобождения моторного тормоза и обеспечения возможности ручного перемещения ползуна 7 в случае, когда, например, инструмент должен быть заменен или удален. Продольная ось I инструмента соответствует оси симметрии хвостовика 5 инструмента хирургического инструмента.
Держатель 3.4 инструмента также может быть соединен посредством фиксирующего механизма с третьим рычажным звеном 3.3, что делает возможным простой и быстрый монтаж и демонтаж. Также являются возможными и другие соединения, например болтовое соединение.
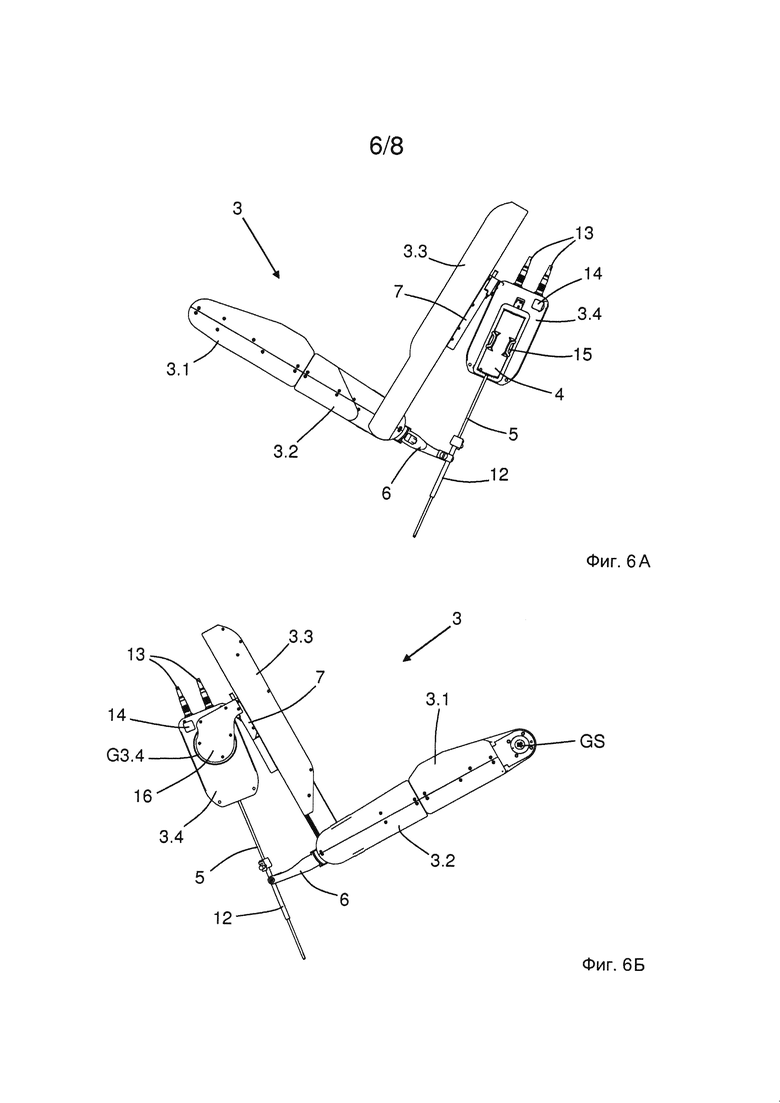
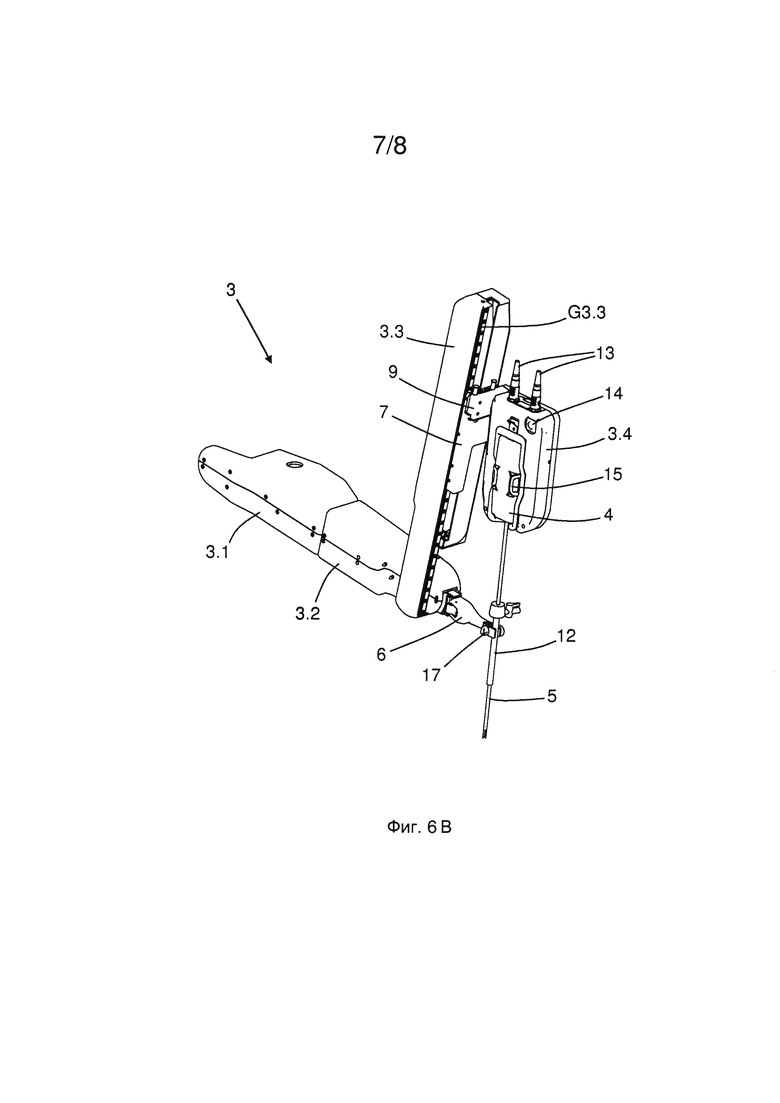
В то время как в показанном на фиг.5 варианте осуществления не применено никакого крепления 6 троакара, в показанном на фиг.6А и 6Б варианте осуществления отображен обратный случай. Фиг. 6А и 6Б показывают устройство 3 удержания инструментов с двух противоположных точек обзора; на фиг.6Б представлена обратная сторона держателя 3.4 инструмента. Также на обратной стороне находится другой контактный щуп 14, который может иметь отличную от контактного щупа 14 на передней стороне функцию. Однако он может быть соединен с контактным щупом 14 на передней стороне таким образом, что, например, только посредством давления на оба контактных щупа 14 совместно, фиксирующий механизм раскрывается и освобождает головку инструмента или освобождает тормоз. Держатель 3.4 инструмента соединен с ползуном 7 посредством шарнира G3.4 и крепления 16 шарнира. Фиг. 6 В показывает представленное на фиг.6А и 6Б устройство 3 удержания инструментов на перспективном виде. В данном случае канюля с возможностью поворота зафиксирована в выполненном на креплении 6 троакара зажимном приспособлении 17.
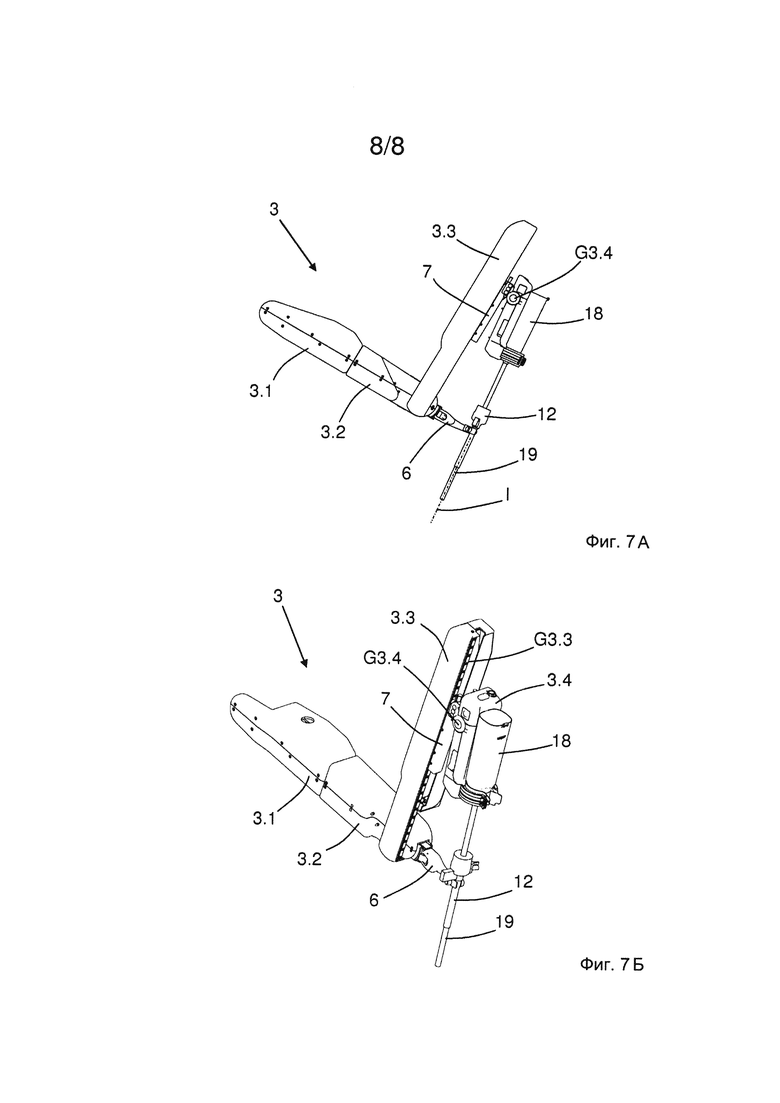
Фиг. 7А, 7Б показывают, наконец, устройство 3 удержания инструментов с другим держателем 3.4 инструмента, в котором эндоскоп 18 соединен с хвостовиком 19 эндоскопа. Такая, подходящая также для других хирургических инструментов конструктивная форма держателя 3.4 инструмента нуждается в меньшем месте, поскольку за счет повернутого на 90° по отношению к показанному на фиг.6 варианту осуществления расположения, обеспечена лучшая возможность встраивания шарнира в держатель 3.4 инструмента. Также и эндоскоп 18 имеет продольную ось I инструмента, которая соответствует оси симметрии хвостовика 19 эндоскопа.
Описанное выше устройство обеспечивает возможность компактного и устойчивого построения роботизированной хирургической системы, прежде всего манипулятора для роботизированной хирургической системы, что облегчает обслуживание хирургической системы посредством оператора или хирурга, а также уменьшает нагрузку на пациента за счет установки инструмента или же троакара с возможностью свободного поворота в точке поворота.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор роботизированного хирургического комплекса | 2020 |
|
RU2754219C1 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С УЗЛОМ ПРИВОДА, ИМЕЮЩИМ КОЛЕННО-РЫЧАЖНЫЕ ЭЛЕМЕНТЫ | 2014 |
|
RU2677085C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ РОБОТИЗИРОВАННОЙ ХИРУРГИИ | 2016 |
|
RU2719919C2 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| АКТИВНОЕ ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА И СОДЕРЖАЩАЯ ЕГО ХИРУРГИЧЕСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2013 |
|
RU2651886C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ РОБОТИЗИРОВАННОЙ ХИРУРГИИ, А ТАКЖЕ ПОЗИЦИОНИРУЮЩИЙ ВСПОМОГАТЕЛЬНЫЙ БЛОК | 2016 |
|
RU2719931C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| ЭЛЕМЕНТЫ УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМ СШИВАЮЩИМ ИНСТРУМЕНТОМ С ЭЛЕКТРОПРИВОДОМ | 2014 |
|
RU2670699C9 |
Изобретение относится к медицине, а именно к устройствам удержания инструментов для манипулятора роботизированной хирургической системы. Устройство включает: трехзвенный рычаг в качестве концевого элемента открытой кинематической цепи с первым, вторым и третьим рычажными звеньями; устройство сопряжения для соединения первого рычажного звена с манипулятором посредством сопрягающего поворотного шарнира; торсионный шарнир, который соединяет первое рычажное звено со вторым рычажным звеном; первый активный поворотный шарнир, который соединяет второе рычажное звено с третьим рычажным звеном; поступательный шарнир, который соединяет третье рычажное звено с держателем инструмента для размещения хирургического инструмента с продольной осью инструмента; систему управления с приводами для торсионного шарнира, первого поворотного шарнира и поступательного шарнира для перемещения рычажных звеньев и держателя инструмента друг относительно друга. Держатель инструмента соединен с третьим рычажным звеном посредством второго пассивного поворотного шарнира и является свободно вращаемым вокруг своей оси вращения. Оси вращения первого поворотного шарнира и второго поворотного шарнира расположены параллельно друг другу, вследствие чего продольная ось инструмента является направляемой через точку поворота с возможностью свободного поворота в ней, расположенную на оси вращения торсионного шарнира, в продолжение наружу второго рычажного звена. Достигается увеличение подвижности и минимизация, при соединении с другими манипуляторами, опасности столкновения при перемещении манипуляторов. 5 з.п. ф-лы, 12 ил.
1. Устройство (3) удержания инструментов для манипулятора (1) роботизированной хирургической системы, которое включает в себя:
- трехзвенный рычаг в качестве концевого элемента открытой кинематической цепи с первым, вторым и третьим рычажными звеньями (3.1, 3.2, 3.3),
- устройство сопряжения для соединения первого рычажного звена (3.1) с манипулятором (1) посредством сопрягающего поворотного шарнира (GS),
- торсионный шарнир (G3.1), который соединяет первое рычажное звено (3.1) со вторым рычажным звеном (3.2),
- первый, активный, поворотный шарнир (G3.2), который соединяет второе рычажное звено (3.2) с третьим рычажным звеном (3.3),
- поступательный шарнир (G3.3), который соединяет третье рычажное звено (3.3) с держателем (3.4) инструмента для размещения хирургического инструмента (4, 5, 18, 19) с продольной осью (I) инструмента, а также
- систему управления с приводами для торсионного шарнира (G3.1), первого поворотного шарнира (G3.2) и поступательного шарнира (G3.3) для перемещения рычажных звеньев (3.1, 3.2, 3.3) и держателя (3.4) инструмента друг относительно друга,
отличающееся тем, что держатель (3.4) инструмента соединен с третьим рычажным звеном (3.3) посредством второго, пассивного, поворотного шарнира (G3.4) и является свободно вращаемым вокруг своей оси вращения, причем оси вращения первого поворотного шарнира (G3.2) и второго поворотного шарнира (G3.4) расположены параллельно друг другу, вследствие чего продольная ось (I) инструмента является направляемой через точку (РР) поворота с возможностью свободного поворота в ней, расположенную на оси вращения торсионного шарнира (G3.1), в продолжение наружу второго рычажного звена (3.2).
2. Устройство (3) удержания инструментов по п. 1, отличающееся тем, что на втором рычажном звене (3.2) в области первого поворотного шарнира (G3.2) вдоль продолжения оси вращения торсионного шарнира (G3.1) расположено крепление (6) троакара, которое выполнено для установки троакара с возможностью поворота вокруг оси вращения, параллельной оси вращения первого поворотного шарнира.
3. Устройство (3) удержания инструментов по п. 1 или 2, отличающееся тем, что поступательный шарнир (G3.3) выполнен в виде линейной направляющей (10) с винтовым приводом.
4. Устройство (3) удержания инструментов по одному из пп. 1-3, отличающееся тем, что положение поступательного шарнира (G3.3) вдоль оси поступательного шарнира является устанавливаемым посредством относительного энкодера и расположенных вдоль оси поступательного шарнира датчиков (11) опорного положения.
5. Устройство (3) удержания инструментов по одному из пп. 1-4, отличающееся тем, что держатель (3.4) инструмента выполнен с возможностью соединения с третьим рычажным звеном посредством фиксирующего механизма.
6. Устройство (3) удержания инструментов по одному из пп. 1-5, отличающееся тем, что к держателю (3.4) инструмента присоединен эндоскоп (18) с хвостовиком (19) эндоскопа.
| US 2015005784 A2, 01.01.2015 | |||
| Способ определения режущих свойств инструментальных материалов | 1957 |
|
SU122326A1 |
| US 20130325029 A1, 05.12.2013 | |||
| DE 102013012840 A1, 05.02.2015 | |||
| US 2011071473 A1, 24.03.2011. | |||

