ОБЛАСТЬ ТЕХНИКИ
Изобретение относится в целом к хирургическим инструментам. Более точно, изобретение относится к устройствам для установки в заданное положение/удерживания хирургического инструмента и к способам установки в заданное положение/удерживания хирургического инструмента.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Эндоскопические хирургические операции выполняют посредством использования длинных тонких хирургических инструментов, вводимых в пациента через небольшие разрезы. Для визуализации операционного поля эндоскоп также вводят в пациента через другой разрез. Камера прикреплена к эндоскопу, и изображение проецируется на расположенный поблизости видеодисплей, на который смотрит хирург для мониторинга своих действий внутри пациента.
Для того чтобы дать возможность хирургу использовать обе руки для хирургической операции, эндоскоп удерживается в заданном положении ассистентом, посредством неподвижной регулируемой механической руки или роботизированного позиционирующего устройства с голосовым управлением. Все три способа имеют существенные недостатки. Помимо того что ассистент является высокооплачиваемым сотрудником, работающим по найму, могут возникнуть трудности при общении с ним, он может устать и может утратить концентрацию и допустить смещение положения эндоскопа. Неподвижные регулируемые механические руки требуют, чтобы хирург дотягивался до них двумя руками для регулирования их, теряя драгоценное время и прерывая операцию. Роботизированные позиционирующие устройства с голосовым управлением являются дорогостоящими, требуют значительных усилий по наладке и часто требуют слишком большого количества времени для обеспечения связи с ними.
Во время многих операций ассистент также устанавливает в заданное положение и удерживает расширительный инструмент для отвода ткани или органов, чтобы они не мешали инструменту хирурга. При выполнении данной задачи также имеют место те же самые проблемы, связанные с общением, концентрацией и усталостью.
Таким образом, в данной области сохраняется потребность в устройстве позиционирования/держателе, имеющем, по меньшей мере, одну из нижеприведенных характеристик: простоту наладки и использования, возможность управления им непосредственно пользователем и обеспечение надежного удерживания эндоскопа и/или другого инструмента (далее в собирательном значении названного «инструментом»).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Варианты осуществления устройств по настоящему изобретению обеспечивают наличие по существу прочного и по существу простого в наладке и использовании устройства позиционирования (устройства для установки в заданное положение). Подобные устройства могут быть использованы для установки в заданное положение и удерживания любого соответствующего инструмента в операционном поле. Варианты осуществления, которые являются механическими, по существу являются прочными, не требуют никаких средств обеспечения и легко поддаются наладке, чистке и стерилизации.
Устройства по настоящему изобретению включают в себя механизм управления и механизм позиционирования. В некоторых вариантах осуществления механизм управления и механизм позиционирования соединены вместе механическим средством, предназначенным для передачи усилия от рукоятки управления механизму позиционирования. В некоторых вариантах осуществления соединение представляет собой гидравлическую систему. В некоторых вариантах осуществления гидравлическая система представляет собой гидравлическую систему с замкнутым контуром. В некоторых вариантах осуществления соединение представляет собой узел с тросиком толкающе-тянущего типа. В некоторых вариантах осуществления соединение представляет собой систему тросиков и шкивов. В некоторых вариантах осуществления соединение образовано двумя или более средствами из гидравлической системы, узла с тросиком толкающе-тянущего типа или системы тросиков и шкивов. Механизм управления расположен в месте, как правило, удобном для пользования. Перемещения механизма управления обеспечивают переустановку инструмента, поскольку механизм позиционирования реагирует на перемещение механизма управления, тем самым обеспечивая перестановку инструмента в заданное положение. В некоторых вариантах осуществления механизм управления представляет собой рукоятку. В некоторых вариантах осуществления механизм управления может быть приведен в действие посредством использования только одной руки оператора.
Устройства по настоящему изобретению могут иметь множество возможных осей перемещения или степеней свободы для обеспечения заданного управления. В некоторых вариантах осуществления устройство имеет две оси наклона и одну ось выдвигания. В некоторых вариантах осуществления первая ось наклона позволяет пользователю наклонить инструмент вперед или назад, в результате чего рабочий конец инструмента перемещается вперед или назад. В некоторых вариантах осуществления вторая ось наклона обеспечивает возможность наклона рабочего конца инструмента из стороны в сторону. Ось выдвигания позволяет пользователю выдвинуть или отвести рабочий конец инструмента дальше в или из пациента. В некоторых вариантах осуществления ось поворота позволяет пользователю повернуть инструмент относительно его длины. В некоторых вариантах осуществления устройство включает в себя дополнительные оси перемещения, такие как ось захвата и ось изгиба. Различные оси, описанные здесь, могут быть использованы в любой комбинации в конкретном варианте осуществления.
В некоторых вариантах осуществления механизм позиционирования содержит тормозное устройство, которое может обеспечить фиксацию механизма позиционирования в определенном положении, и при этом механизм управления содержит приводное устройство для указанного тормозного устройства.
В некоторых вариантах осуществления механизм позиционирования обеспечивает использование ткани пациента для создания точки поворота для установки инструмента в заданное положение внутри тела пациента. В некоторых вариантах осуществления механизм позиционирования обеспечивает использование нежестких обеспечивающих поворот элементов при установке инструмента в заданное положение внутри тела человека.
В некоторых вариантах осуществления настоящее изобретение включает в себя способы установки инструмента в заданное положение (способы позиционирования инструмента) для использования при хирургической операции. В некоторых вариантах осуществления данные способы включают в себя способы использования заявленных устройств для установки инструмента в заданное положение для использования во время хирургической операции. В некоторых вариантах осуществления способы позволяют хирургу использовать только одну руку для установки инструмента в заданное положение для использования во время хирургической операции.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Признаки, задачи и преимущества настоящего изобретения станут более очевидными из подробного описания, приведенного ниже, при рассмотрении его в сочетании с чертежами, на которых аналогичные ссылочные позиции используются для обозначения соответственно везде и в которых:
Фиг.1 показывает вид в перспективе одного варианта осуществления настоящего изобретения, используемого совместно с различными хирургическими приспособлениями во время хирургической операции.
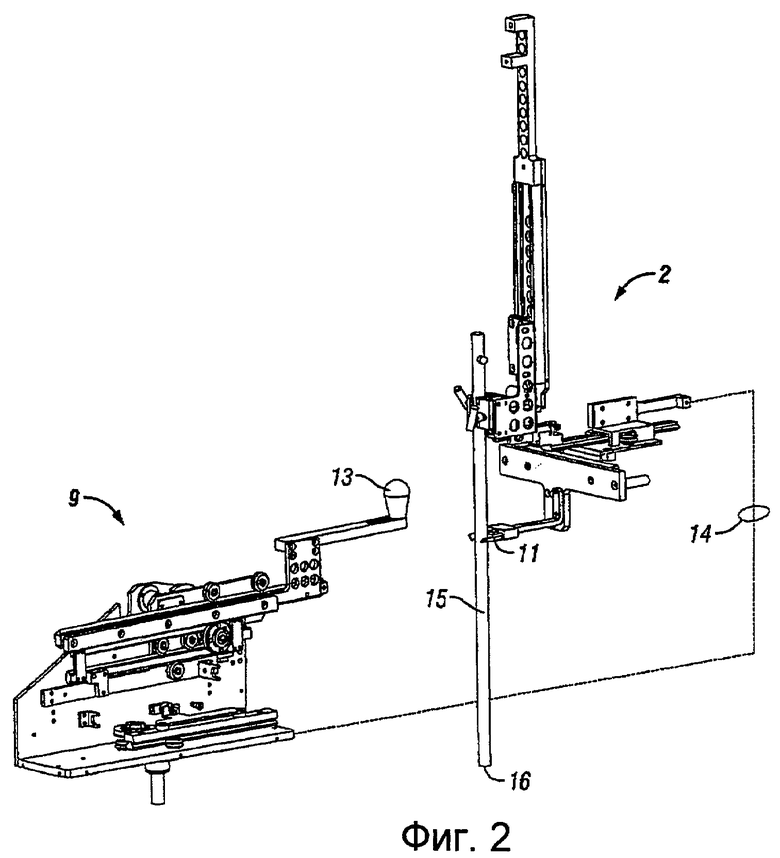
Фиг.2 показывает схематический вид одного варианта осуществления механизма позиционирования и одного варианта осуществления механизма управления, соединенных посредством соединительного устройства, обеспечивающего передачу механического усилия.
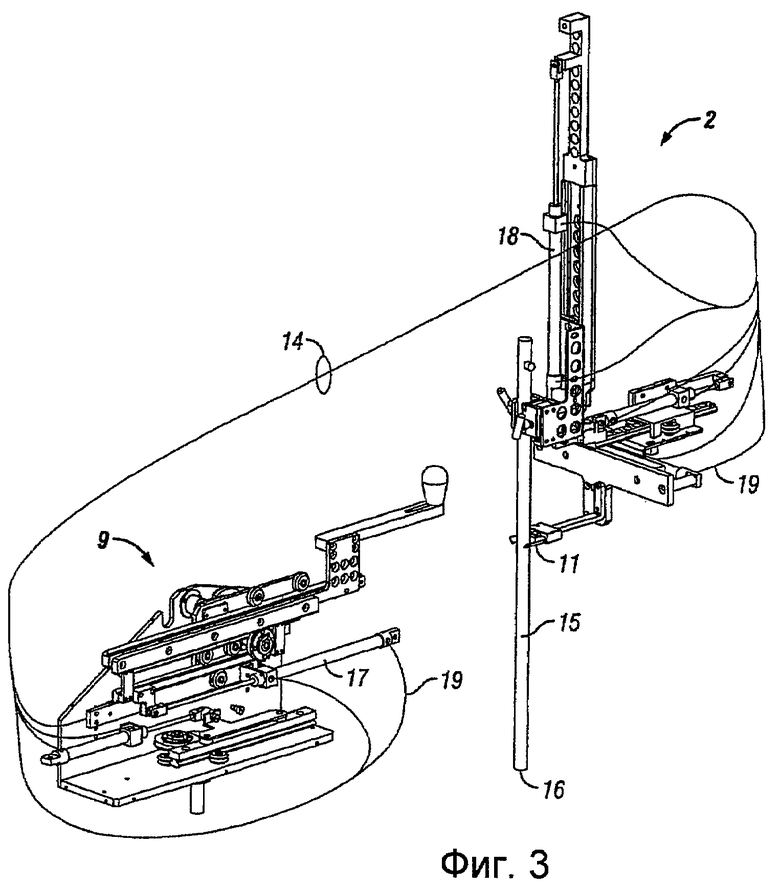
Фиг.3 показывает схематический вид одного варианта осуществления механизма позиционирования и одного варианта осуществления механизма управления, соединенных посредством гидравлического соединительного устройства, обеспечивающего передачу механического усилия.
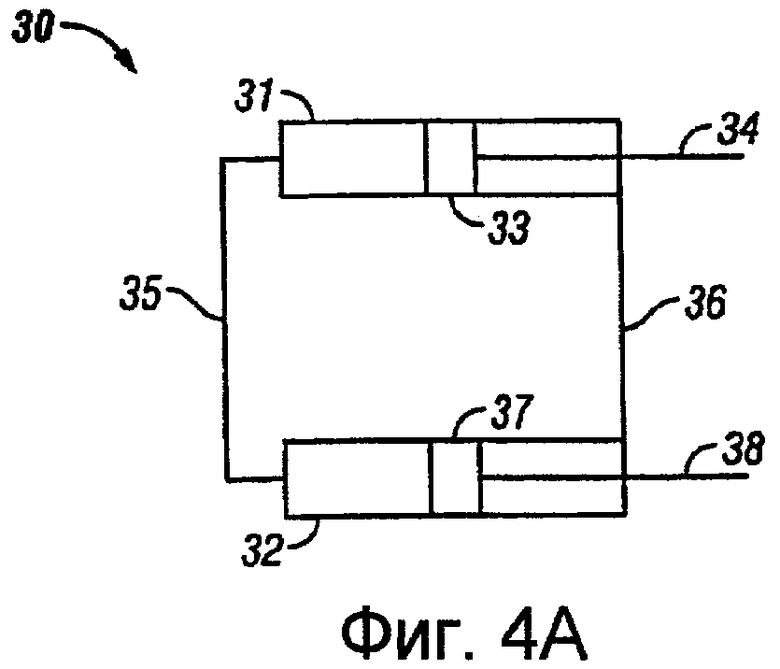
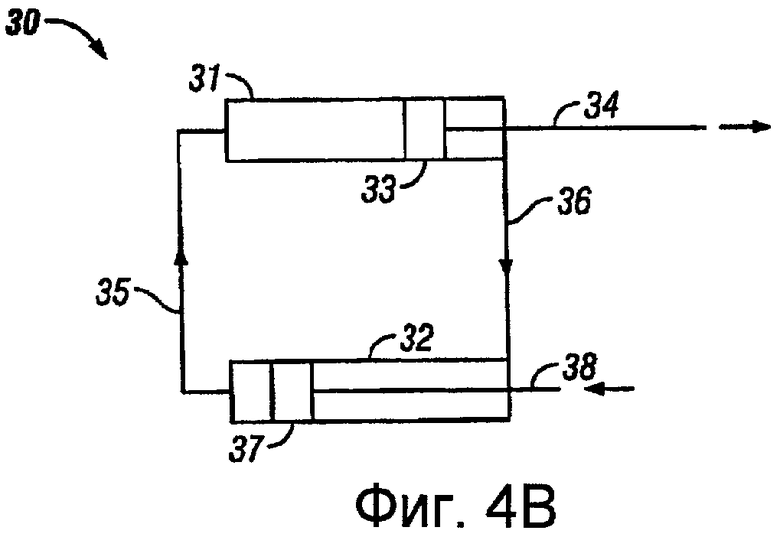
Фиг. 4А-4С показывают схематический вид одного варианта осуществления гидравлической системы с замкнутым контуром.
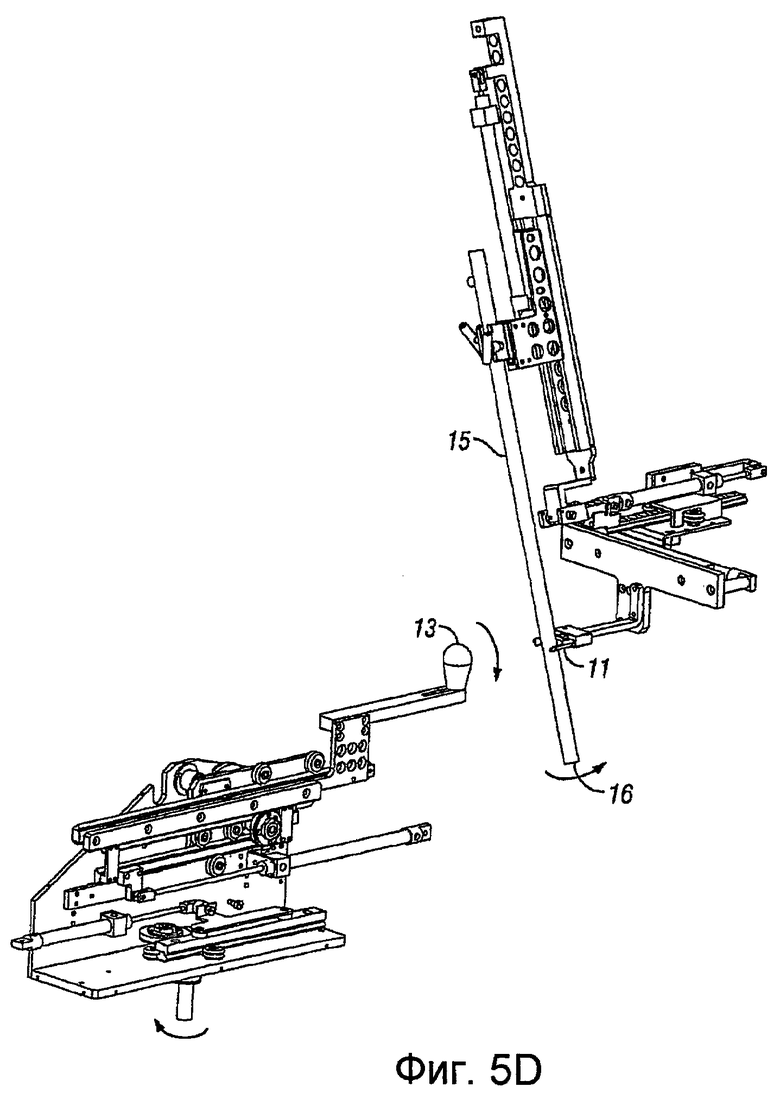
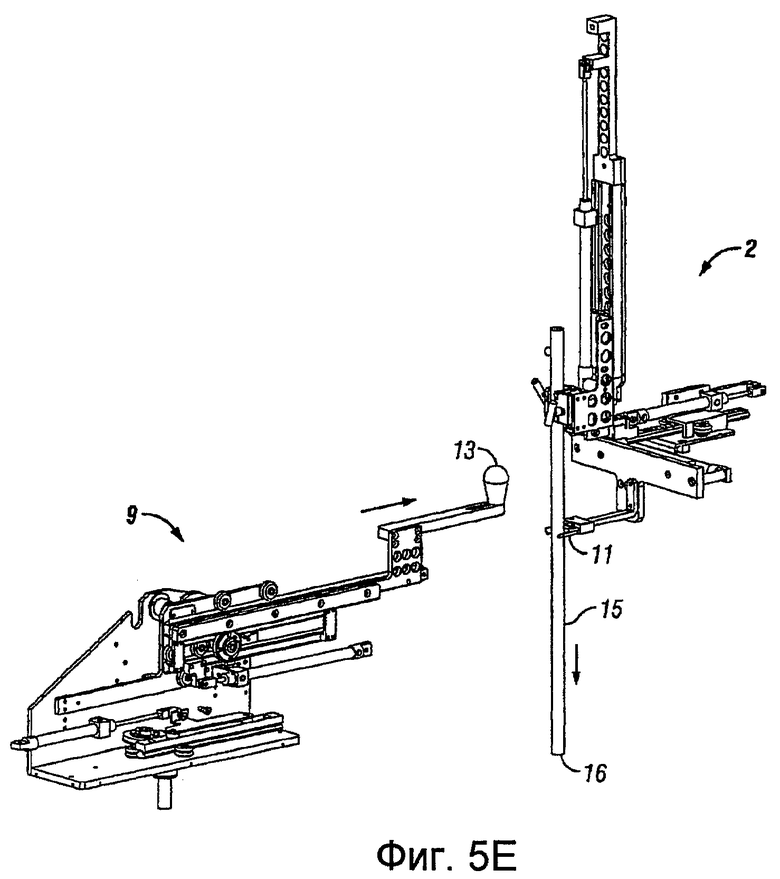
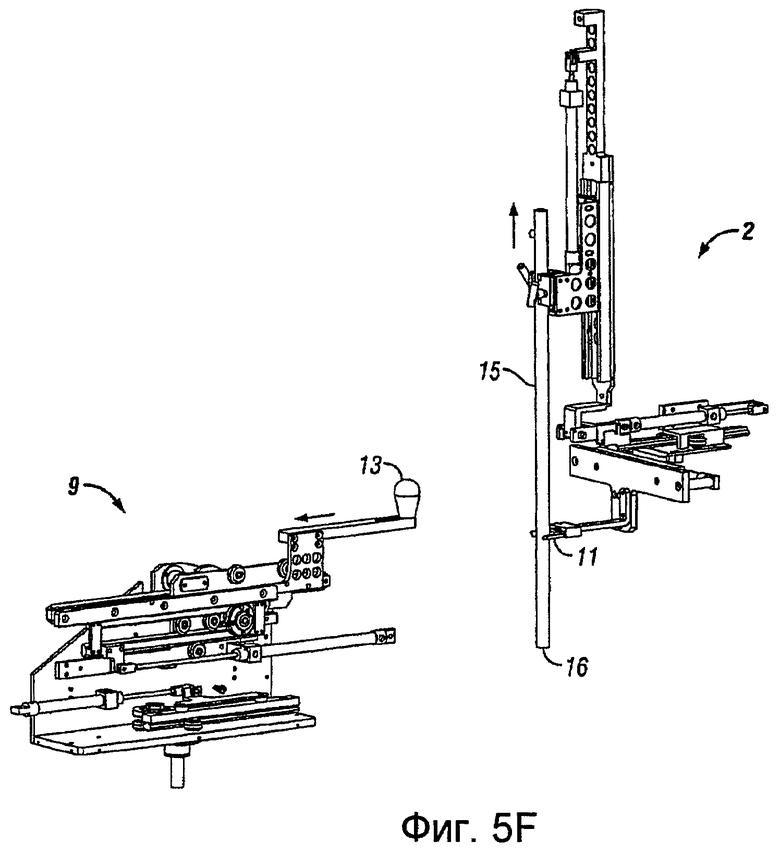
Фиг. 5А-5F показывают схематический вид взаимосвязи между движениями одного варианта осуществления механизма управления и одного варианта осуществления механизма позиционирования.
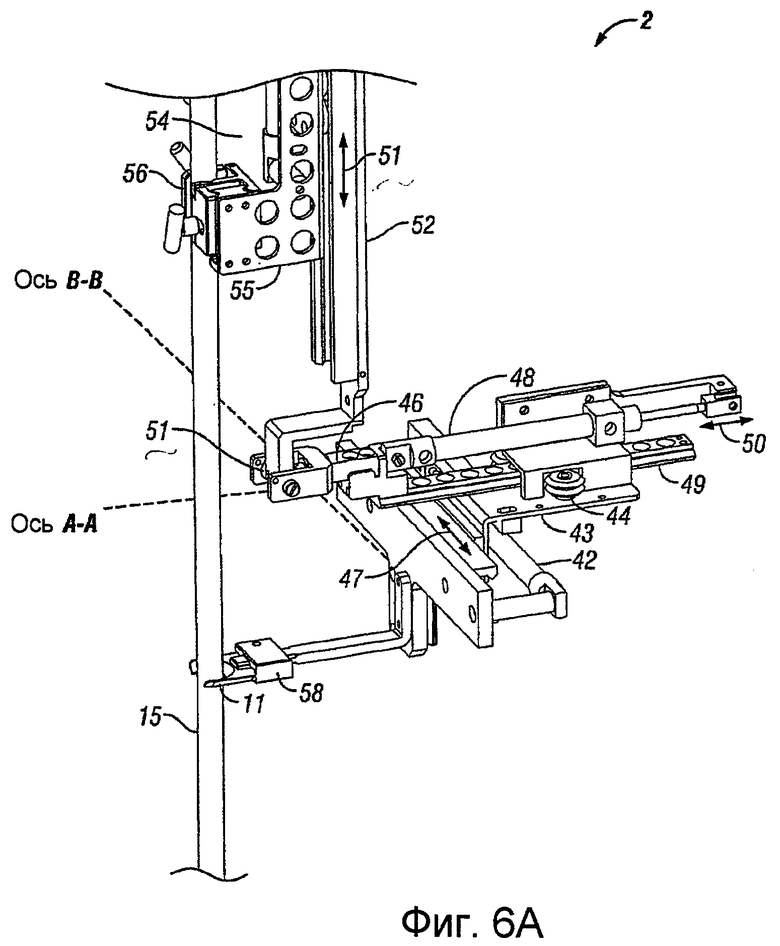
Фиг. 6А-6С показывают крупным планом схематический вид одного варианта осуществления механизма позиционирования.
Фиг.7 показывает схематический вид одного варианта осуществления механизма позиционирования и одного варианта осуществления механизма управления, соединенных посредством соединительного устройства, обеспечивающего передачу механического усилия, выполненного с тросиками толкающе-тянущего типа.
Фиг.8 показывает крупным планом схематический вид одного варианта осуществления механизма управления, в котором используется соединительное устройство, обеспечивающее передачу механического усилия, выполненное с тросиками толкающе-тянущего типа.
Фиг.9 показывает крупным планом схематический вид одного варианта осуществления механизма позиционирования, в котором используется соединительное устройство, обеспечивающее передачу механического усилия, выполненное с тросиками толкающе-тянущего типа.
Фиг.10 показывает схематический вид одного варианта осуществления механизма позиционирования и одного варианта осуществления механизма управления, соединенных посредством системы тросиков и шкивов.
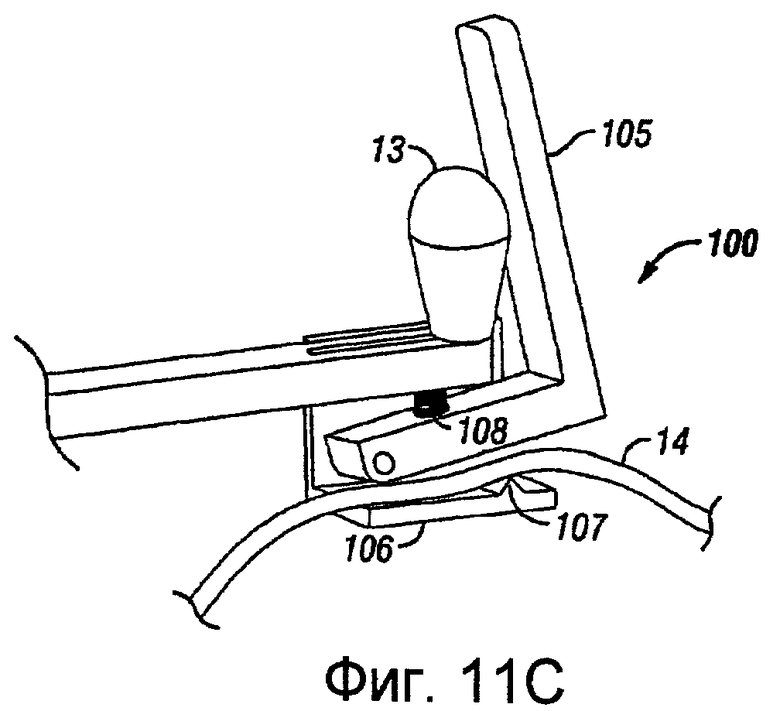
Фиг.11А-С показывают крупным планом вид одного варианта осуществления механизма управления, который имеет один вариант осуществления тормозной системы.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Некоторые варианты осуществления изобретения будут теперь описаны со ссылкой на фигуры.
Если обратиться к Фиг.1, то видно, что многочисленные хирургические инструменты показаны введенными в пациента на операционном столе. Лапароскопические инструменты 5 вводят через элементы 6 для доступа для разрезания, сшивания, манипулирования тканью и т.д. Узел 3 из эндоскопа/камеры, используемый для визуализации операционного поля, также вводят через элемент 6 для доступа и удерживают на месте посредством механизма 2 позиционирования. Механизм 2 позиционирования удерживают посредством регулируемой механической руки 10, которая смонтирована на опорной конструкции 7. Рукоятка 9 управления смонтирована на опорном кронштейне 8. При использовании пользователь регулирует положение эндоскопа/камеры 3 посредством манипулирования рукояткой 9 управления, что заставляет механизм 2 позиционирования обеспечивать перемещение эндоскопа/камеры 3 в заданное положение. Как только пользователь прекратит манипулировать рукояткой 9 управления, механизм 2 позиционирования перестанет перемещаться и будет удерживать эндоскоп/камеру 3 в новом положении.
Другие инструменты также могут быть установлены в заданном положении и удерживаться данным образом. Например, ретрактор 4 показан прикрепленным к механизму 2 позиционирования таким же образом, как эндоскоп/камера. Ретрактор 4 поджимает органы или ткань для удерживания их так, чтобы они не мешали хирургу. Пользователь манипулирует соответствующей рукояткой 9 управления, чтобы обеспечить перемещение ретрактора 4 посредством механизма 2 позиционирования в соответствующем направлении. Как только пользователь прекратит перемещать рукоятку 9 управления, механизм 2 позиционирования прекратит перемещаться и будет удерживать ретрактор 4 в заданном положении. Само собой разумеется, любой другой инструмент, применимый при хирургической операции, можно удерживать и манипулировать им посредством вариантов осуществления устройств по настоящему изобретению. Множество устройств, которые, таким образом, могут перемещаться и удерживаться посредством механизма позиционирования и рукоятки управления, названы ниже «инструментом(-ами)». Инструменты могут быть постоянно присоединены к механизму 2 позиционирования или прикреплены к нему с возможностью смены. В некоторых вариантах осуществления инструмент присоединяют к механизму 2 позиционирования перед введением инструмента в тело пациента. В других вариантах осуществления инструмент сначала вручную вводят в тело и устанавливают в заданное положение, после чего его присоединяют к механизму 2 позиционирования. В некоторых вариантах осуществления механизм позиционирования расположен вне тела пациента и соединен с инструментом вне тела пациента.
При использовании описанной выше конструкции механизма 2 позиционирования и рукоятки 9 управления хирург может переустанавливать и удерживать разные инструменты, не нуждаясь в ассистенте, в результате чего избегают проблем, связанных с общением с данным ассистентом, или проблем, связанных с усталостью ассистента или потерей им внимания.
Фиг.2 показывает один вариант осуществления механизма 2 позиционирования и один вариант осуществления механизма управления, а именно рукоятки 9 управления, соединенных посредством соединительного устройства 14, обеспечивающего передачу механического усилия. Данное соединительное устройство 14, обеспечивающее передачу механического усилия, передает импульсы усилия от рукоятки 9 управления к механизму 2 позиционирования, что позволяет пользователю перемещать механизм 2 позиционирования посредством манипулирования рукояткой 9 управления. Как рассмотрено ниже, соединительное устройство 14, обеспечивающее передачу механического усилия, может представлять собой гидравлическое, состоящее из тросиков и шкивов, состоящее из тросиков толкающе-тянущего типа или другое механическое средство.
Механизм управления может иметь любую конфигурацию, которая позволяет хирургу эффективно манипулировать механизмом позиционирования. В показанном варианте осуществления механизм управления представляет собой особую рукоятку 9 управления. Тем не менее, могут быть предусмотрены другие механизмы управления. В качестве неограничивающего примера механизм управления может иметь конфигурацию, подобную перчатке, которая «охватывает» руку (от кисти до плеча), кисть руки и пальцы пользователей.
При использовании пользователь перемещает рукоятку 9 управления посредством толкания ручки 13 в заданном направлении. Сигналы усилия передаются от рукоятки 9 управления механизму 2 позиционирования посредством соединительного устройства 14, обеспечивающего передачу механического усилия, что в ответ вызывает перемещение механизма 2 позиционирования. Инструмент 15 перемещается по нескольким осям. В предпочтительном варианте осуществления инструмент поворачивается вокруг точки 11, в которой он входит в пациента. Ткань пациента в точке 11 может служить в качестве точки поворота, или может быть обеспечена обеспечивающая поворот опора (не показанная), чтобы обеспечить поворот инструмента 15 вокруг точки (оси) 11. Механизм 2 позиционирования обеспечивает толкание инструмента 15 вперед-назад, из стороны в сторону или при любом сочетании данных двух направлений. Инструмент 15, удерживаемый в точке 11 или тканью пациента, или обеспечивающей поворот опорой (не показанной), наклоняется относительно точки 11, в результате чего дистальный рабочий конец 16 инструмента перемещается в новое положение внутри пациента. Предпочтительный вариант осуществления также содержит ось выдвигания, которая позволяет пользователю выдвигать или отводить дистальный конец 16 инструмента.
На Фиг.3 показан предпочтительный вариант осуществления, в котором соединение, обеспечивающее передачу механического усилия, является гидравлическим. Перемещения рукоятки 9 управления вызывают перемещение рабочей жидкости (не показанной) по системе труб к механизму 2 позиционирования, который в ответ обеспечивает наклон и/или выдвигание/отвод инструмента 15 относительно точки 11, в результате чего обеспечивается переустановка дистального рабочего конца 16 инструмента 15 внутри пациента. Могут быть использованы обычные гидравлические системы, в которых используются цилиндры, насосы, клапаны и резервуары. Предпочтительный гидравлический способ показан на Фиг.3. Гидравлический(-е) цилиндр(-ы) 17 управления в рукоятке 9 управления соединены в виде замкнутого контура с исполнительным(-ими) рабочим(-ими) гидравлическим(-ими) цилиндром (цилиндрами) 18 в механизме 2 позиционирования посредством системы 19 труб. Когда пользователь перемещает рукоятку 9 управления в новое положение, обеспечивается приложение толкающего или тянущего усилия к штоку цилиндра 17 управления, в результате чего осуществляется вытеснение рабочей жидкости в цилиндре 17 управления. Данная рабочая жидкость выдавливается по системе 19 труб в реагирующий исполнительный рабочий цилиндр 18 в механизме 2 позиционирования, что вызывает перемещение штока исполнительного рабочего цилиндра 18. Данное перемещение используется для наклона и/или выдвигания/отвода инструмента.
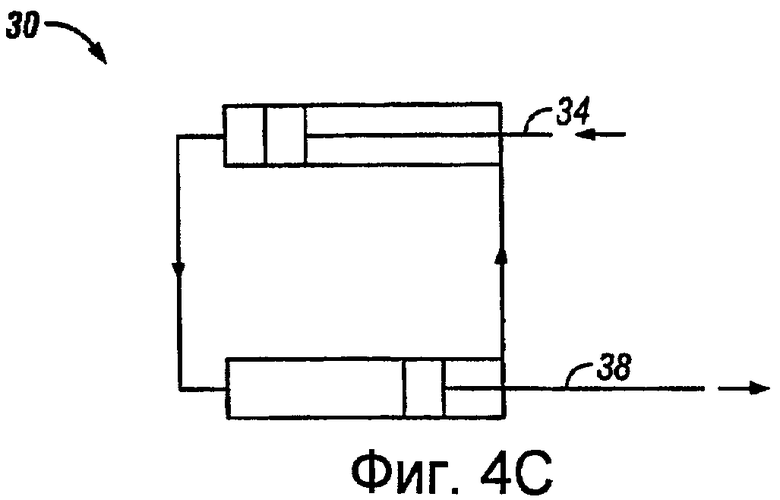
Фиг. 4А-4С показывают данное действие в схематическом виде. Базовый замкнутый гидравлический контур 30 показан на Фиг.4А. Цилиндр 31 управления содержит поршень 33, который соединен со штоком 34. Аналогичным образом, исполнительный рабочий цилиндр 32 содержит поршень 37, соединенный со штоком 38. Задняя сторона каждого цилиндра соединена с задней стороной другого цилиндра посредством системы 35 труб. Аналогичным образом, передняя сторона каждого цилиндра соединена с передней стороной другого цилиндра посредством системы 36 труб.
Как показано на Фиг.4B, шток 34 цилиндра 31 управления, расположенный в рукоятке 9 управления, принудительно смещается вправо, что вызывает принудительное смещение поршня 33 вправо. Данное действие вызывает перемещение рабочей жидкости от передней стороны цилиндра 31 управления к передней стороне исполнительного рабочего цилиндра 32 посредством системы 36 труб. Это заставляет шток 38 и поршень 37 в исполнительном рабочем цилиндре 32 перемещаться влево. Это приводит к вытеснению рабочей жидкости из задней стороны исполнительного рабочего цилиндра 32 к задней стороне цилиндра 31 управления посредством системы 35 труб. Перемещение исполнительного рабочего цилиндра 38 используется в механизме 2 позиционирования для переустановки рабочего конца 16 инструмента в заданное место.
Фиг.4С показывает обратное движение, при котором шток 34 управления перемещается влево, что вызывает перемещение исполнительного рабочего штока 38 вправо.
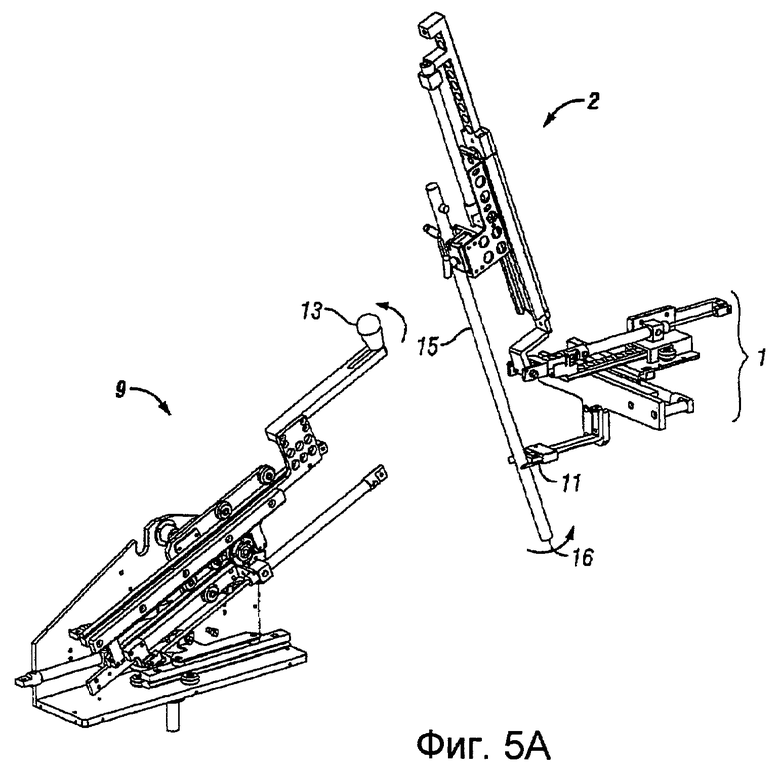
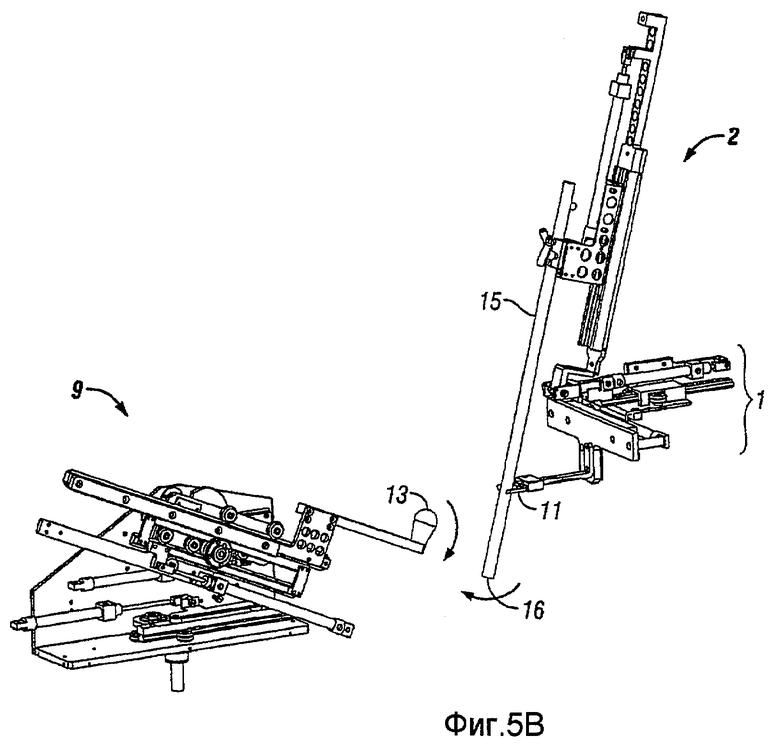
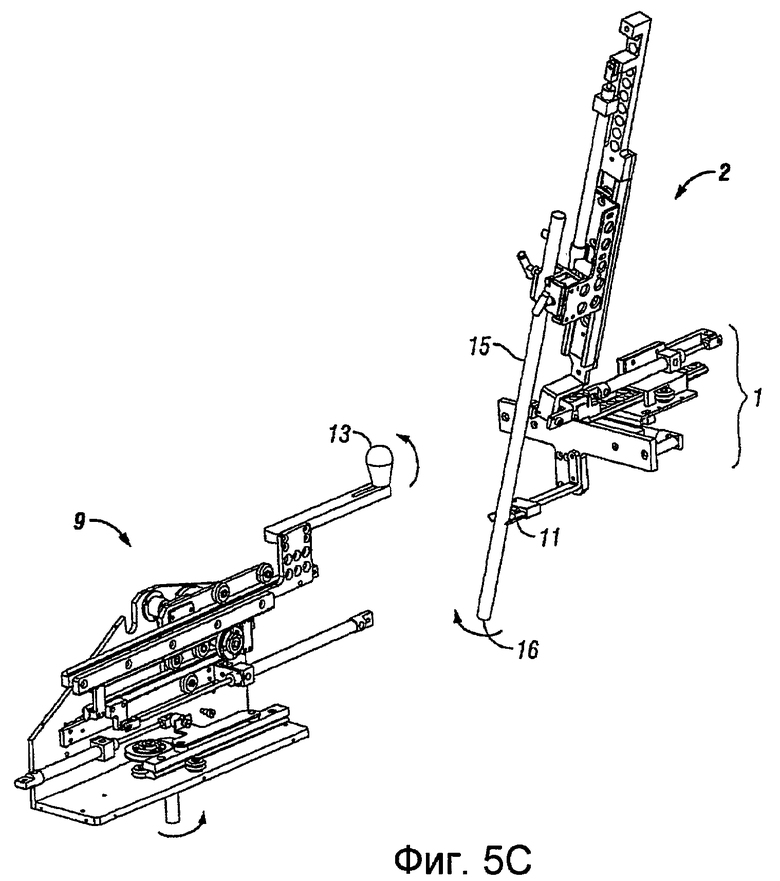
Фиг.5А-F показывают взаимосвязь между перемещениями рукоятки 9 управления и одного варианта осуществления механизма 2 позиционирования. На Фиг.5А ручка 13 рукоятки 9 управления была оттянута вверх, что вызвало перемещение рабочей жидкости между цилиндрами управления в рукоятке 9 управления и исполнительными рабочими цилиндрами в механизме 2 позиционирования, в результате чего обеспечивается наклон инструмента 15 посредством механизма 2 позиционирования вокруг точки 11 и, таким образом, перемещение дистального рабочего конца 16 инструмента 15 назад относительно корпуса 1 механизма 2 позиционирования. Фиг.5b аналогичным образом показывает ручку 13, принудительно смещенную вниз, что вызывает перемещение рабочего конца 16 от корпуса 1 механизма 2 позиционирования. Фиг.5с показывает ручку 13, перемещенную влево, в результате чего обеспечивается принудительное перемещение рабочего конца 16 вправо относительно корпуса 1 механизма 2 позиционирования. Аналогичным образом, Фиг.5D показывает ручку 13, перемещенную вправо, в результате чего обеспечивается принудительное перемещение рабочего конца 16 влево относительно корпуса 1 механизма 2 позиционирования. На Фиг.5Е ручка 13 принудительно смещена вперед для вдвигания рабочего конца 16 дальше в пациента, и, аналогичным образом, Фиг.5F показывает ручку, принудительно смещенную назад для отвода рабочего конца 16 из пациента.
На Фиг.6А представлено более детальное изображение одного варианта осуществления механизма позиционирования. Все три оси перемещения «содержат» исполнительный рабочий цилиндр и направляющее устройства. Перемещение из стороны в сторону обеспечивается за счет перемещения исполнительного рабочего цилиндра 42, который обеспечивает приложение толкающего/тянущего усилия к подвижному узлу 44 наклона, который может свободно перемещаться из стороны в сторону, как показано стрелкой 47. Данное перемещение передается узлу 52 перемещения инструмента посредством нежесткой обеспечивающей поворот (шарнирной) опоры 46. Данная, обеспечивающая поворот опора 46 обеспечивает возможность поворота узла 52 перемещения инструмента вокруг оси А-А и автоматической установки его под надлежащим углом для обеспечения возможности поворота инструмента 15 вокруг точки 11. Перемещение вперед/назад обеспечивается за счет перемещения исполнительного рабочего цилиндра 48, которое вызывает приложение толкающего или тянущего усилия к направляющему устройству 49 вдоль роликов 44, как показано стрелкой 50. Перемещение направляющего устройства 49 передается к узлу 52 перемещения инструмента через посредство нежесткой обеспечивающей поворот опоры 51. Данная, обеспечивающая поворот опора 51 обеспечивает возможность поворота узла 52 перемещения инструмента вокруг оси В-В и автоматической установки его под надлежащим углом для обеспечения возможности поворота инструмента 15 вокруг точки 11. Движение выдвигания/отвода обеспечивается за счет перемещения исполнительного рабочего цилиндра 54, которое вызывает приложение толкающего/тянущего усилия к подвижному элементу 55, обеспечивающему выдвигание, в направлении, показанном стрелкой 57. Инструмент 15 прикреплен к подвижному элементу 55, обеспечивающему выдвигание, посредством зажима 56 и, таким образом, выдвигается или отводится в пациенте.
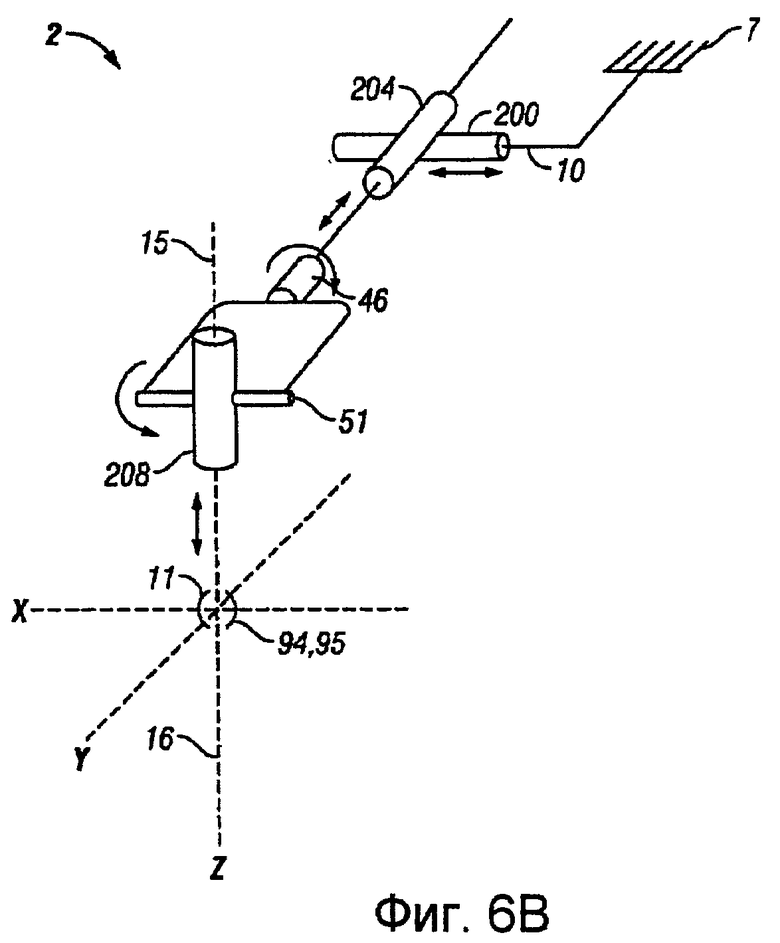
Фиг.6B показывает схематическое изображение, которое более четко показывает подвижные элементы одного варианта осуществления механизма 2 позиционирования. В показанном варианте осуществления механизм состоит из новой конструкции из трех ползунов, двух вращающих шарниров и одного шарового шарнира. Первый ползун 200 смонтирован на регулируемой механической руке 10, присоединенной к опорной конструкции 7. Второй ползун 204 смонтирован на первом ползуне 200. Первый вращающийся шарнир 46 смонтирован на втором ползуне 204. Второй вращающийся шарнир 51 смонтирован на первом вращающемся шарнире 46. Третий ползун 208 смонтирован на втором вращающемся шарнире 51. Сферический шарнир 210 образован посредством разреза 94 в ткани 95 пациента (как показано на Фиг.6С). Поперечное движение первого ползуна 200 передается посредством второго ползуна 204 и первого (46) и второго (51) вращающихся шарниров третьему ползуну 208. Данное движение вызывает поворот инструмента 15 относительно разреза 94, что приводит к перемещению дистального рабочего конца 16 в направлении, противоположном перемещению первого ползуна. Аналогичным образом, поперечное движение второго ползуна 204 передается посредством первого (46) и второго (51) вращающихся шарниров третьему ползуну 208. Данное движение вызывает поворот инструмента 15 относительно разреза 94, что приводит к перемещению дистального рабочего конца 16 в направлении, противоположном перемещению второго ползуна 204. Поперечное движение третьего ползуна 208 вызывает или выдвигание инструмента 15 дальше в разрез 94, или отвод инструмента дальше из разреза 94.
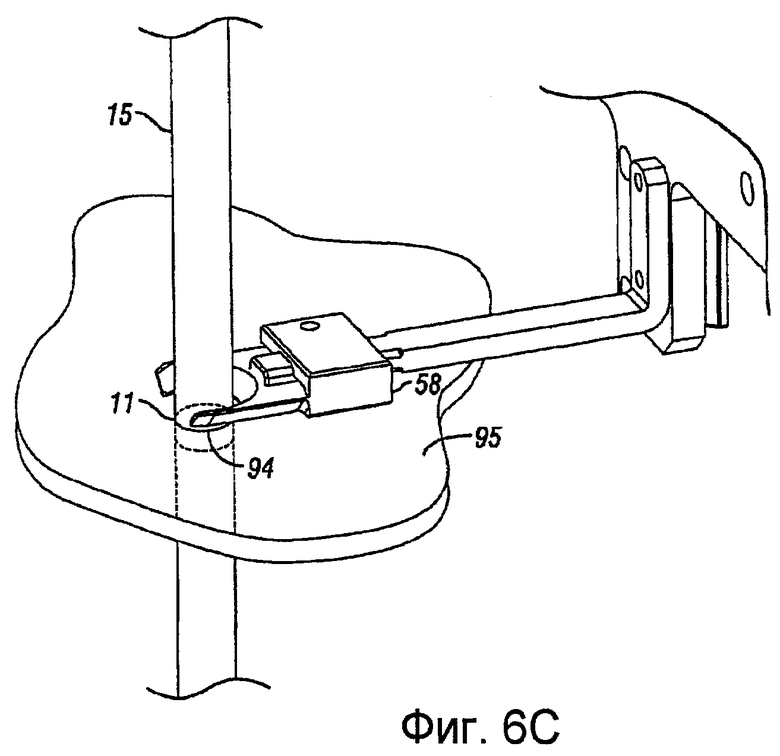
Поскольку нежесткие, обеспечивающие поворот опоры 46 и 51 могут свободно перемещаться, требуется второе обеспечивающее поворот устройство в точке 11 для обеспечения принудительного поворота инструмента относительно данной точки. В предпочтительном варианте осуществления ткань пациента служит в качестве обеспечивающей поворот опоры, что позволяет инструменту 15 наклоняться вокруг точки 11. Данный вариант осуществления показан наиболее четко на Фиг.6С. Для того чтобы помочь пользователю при установке механизма 2 позиционирования оптимальным образом над разрезом 94 в точке 11 в ткани 95 пациента, предусмотрен направляющий башмак 58. Во время наладки пользователь размещает центр башмака 58 над разрезом 94 в точке 11, затем вводит инструмент 15 в разрез 94 в ткани 95 пациента и прикрепляет его к обеспечивающему выдвигание, подвижному элементу 55 посредством зажима 56. Подобная наладка показана на Фиг.6А. В другом варианте осуществления предусмотрена сферическая опора (не показанная) для создания второй обеспечивающей поворот опоры, которая будет также расположена над разрезом в точке 11.
На Фиг.7 показан альтернативный вариант осуществления. В данном варианте осуществления соединительное устройство 14, обеспечивающее передачу механического усилия, представляет собой систему из узлов с тросиком толкающе-тянущего типа. Базовые узлы с тросиком толкающе-тянущего типа хорошо известны в данной области техники. Как правило, узлы с тросиком толкающе-тянущего типа содержат гибкий тросик, перемещаемый внутри гибкой направляющей трубки. За счет приложения толкающего или тянущего усилия к одному концу тросика движение передается другому концу тросика, как обычно видно в велосипедных механизмах переключения передач. В качестве примера на Фиг.7 показано, что перемещение по оси выдвигания обеспечивается посредством узла 62 с тросиком толкающе-тянущего типа, который прикреплен к механизму 63 выдвигания в рукоятке 9 управления и обеспечивающему выдвигание подвижному элементу 55 в механизме 2 позиционирования. За счет приложения толкающего/тянущего усилия к ручке 13 обеспечивается приложение толкающего/тянущего усилия к тросику в узле 62 с тросиком, что вызывает в ответ перемещение обеспечивающего выдвигание подвижного элемента 55 в механизме 2 позиционирования.
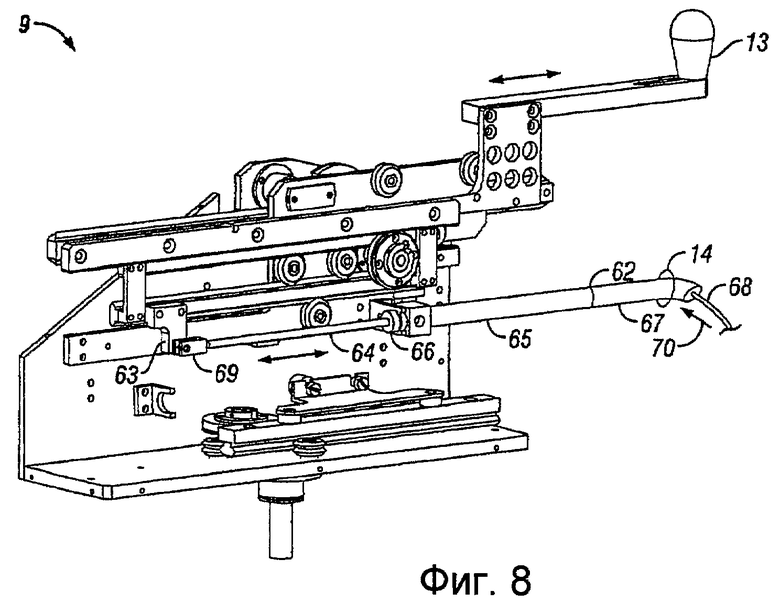
Фиг.8 показывает более подробно тросик толкающе-тянущего типа, используемый на оси выдвигания рукоятки 9 управления. Узел 62 толкающе-тянущего типа содержит жесткий стержень 64, который прикреплен к механизму 63 выдвигания посредством муфты 63. При приложении толкающего/тянущего усилия к ручке 13 механизм 63 выдвигания обеспечивает приложение толкающего или тянущего усилия к стержню 64 посредством муфты 69. Стержень 64 вталкивается в корпус 65 и вытягивается из корпуса 65. Внутри корпуса 65 стержень 64 присоединен к гибкому тросику 68, который перемещается внутри гибкой направляющей 67. Результирующее движение тросика 68 показано стрелкой 70.
Как показано на Фиг.9, узел 62 с тросиком заканчивается у устройства 52 перемещения инструмента, предусмотренного в механизме 2 позиционирования. Движение гибкого тросика 68, показанное стрелкой 70, передается к обеспечивающему выдвигание подвижному элементу 55 посредством жесткого стержня 73. Результирующее движение обеспечивающего выдвигание подвижного элемента 55 показано стрелкой 76.
Для ясности и простоты Фиг. 7, 8 и 9 показывают только перемещение по оси выдвигания, обеспечиваемое узлом с тросиком толкающе-тянущего типа, но в соответствии с данным изобретением предусмотрено то, что перемещения по всем осям движения, описанным здесь, могут быть аналогичным образом осуществлены посредством тросиков толкающе-тянущего типа.
Еще один вариант осуществления показан на Фиг.10. В данном варианте осуществления соединительное устройство 14, обеспечивающее передачу механического усилия, представляет собой систему тросиков и шкивов, показанную в полусхематическом виде. Фиг.10 показывает перемещение по оси выдвигания, обеспечиваемое конструкцией из тросиков и шкивов. Гибкий тросик 80 прикреплен к механизму 63 выдвигания на рукоятке 9 управления в месте 82 соединения. Тросик 80 направляется вокруг нескольких шкивов 84 для присоединения механизма 63 выдвигания, предусмотренного в рукоятке 9 управления, к обеспечивающему выдвигание подвижному элементу 55 в механизме 2 позиционирования в месте 86 соединения. Движение механизма 63 выдвигания приводит к движению тросика 80, как показано стрелкой 88. Данное движение передается обеспечивающему выдвигание подвижному элементу 55 посредством тросика 80, что приводит к движению инструмента 15, показанному стрелкой 90.
Для ясности и простоты Фиг.10 показывает только перемещение по оси выдвигания, обеспечиваемое конструкцией из тросиков/шкивов, но в соответствии с данным изобретением предусмотрено то, что перемещения по всем осям движения, описанным здесь, могут быть аналогичным образом осуществлены посредством конструкций из тросиков/шкивов.
В соответствии с данным изобретением также предусмотрено применение других соединений, обеспечивающих передачу механического усилия. Например, данное изобретение включает в себя устройства, в которых используются жесткие стержни, соединенные универсальными шарнирами и муфтами, лентами толкающе-тянущего типа, ремни, цепями и шаровыми приводами.
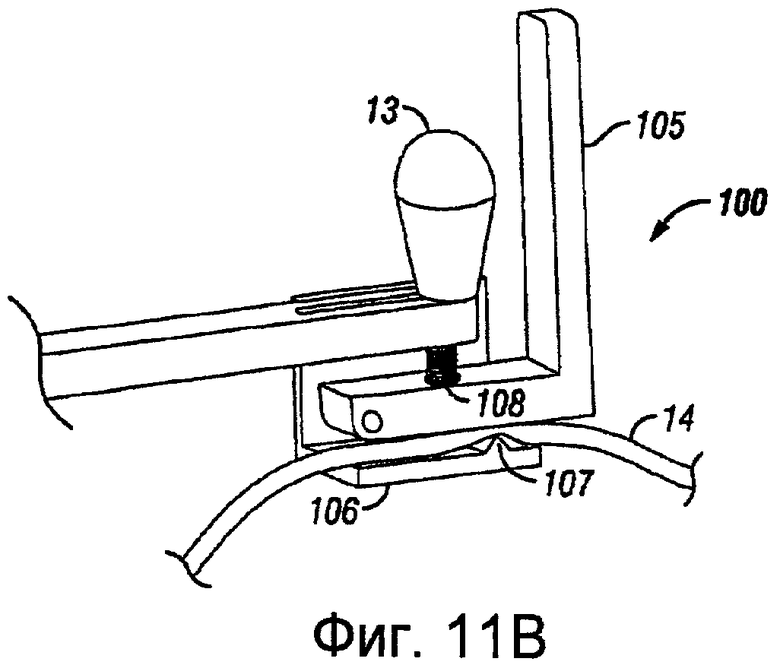
Другие варианты осуществления проиллюстрированы на Фиг. 11А-B. На Фиг.11А показано тормозное устройство 100, прикрепленное к рукоятке 9 управления. В показанном варианте осуществления тормоз 100 обычно «включен», то есть тормоз работает и предотвращает движение до тех пор, пока он не будет отключен пользователем. Для перестановки инструмента пользователь захватывает тормозное устройство 100, прилагает усилие для перевода тормоза в нерабочее положение и переставляет инструмент. Когда новое положение будет достигнуто, пользователь отпускает тормозное устройство 100, в результате чего обеспечивается повторное «включение» тормоза.
На Фиг.11B показан вариант осуществления тормозного устройства 100 с одной стенкой, удаленной для ясности, во «включенном» положении. В данном варианте осуществления соединительное устройство, обеспечивающее передачу механического усилия, является гидравлическим, но предусмотрено, что тормозное устройство может быть использовано вместе с вариантами осуществления, имеющими любое соединительное устройство, обеспечивающее передачу механического усилия (например, соединительное устройство, в котором используются тросики толкающе-тянущего типа или системы с тросиками и шкивами). В данном варианте осуществления гидравлические трубки 14 (только одна трубка показана для ясности) зажаты между местом 107 зажима на корпусе 106 тормоза и тормозным рычагом 105 благодаря усилию, приложенному со стороны пружины 108. Тем самым предотвращается поток рабочей жидкости по трубкам 14, в результате чего предотвращается движение инструмента.
Фиг.11В показывает вариант осуществления тормозного устройства 100 в выключенном положении. В данном варианте осуществления соединительное устройство, обеспечивающее передачу механического усилия, также является гидравлическим, но предусмотрено, что тормозное устройство может быть использовано вместе с вариантами осуществления, имеющими любое соединительное устройство, обеспечивающее передачу механического усилия (например, соединительное устройство, в котором используются тросики толкающе-тянущего типа или системы с тросиками и шкивами). Тормозной рычаг 105 был оттянут назад по направлению к ручке 13, что вызывает сжатие пружины 108 и поворот тормозного рычага 105 от места 107 зажима, в результате чего давление, действующее на трубки 14, снимается, и обеспечивается возможность протекания по трубкам 14. В данном положении обеспечивается возможность движения, и инструмент может быть переставлен.
| название | год | авторы | номер документа |
|---|---|---|---|
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С УЗЛОМ ПРИВОДА, ИМЕЮЩИМ КОЛЕННО-РЫЧАЖНЫЕ ЭЛЕМЕНТЫ | 2014 |
|
RU2677085C2 |
| ВСТРАИВАЕМАЯ В ДВЕНАДЦАТИПЕРСТНУЮ КИШКУ СИСТЕМА ДЛЯ ВЫСВОБОЖДЕНИЯ КАНЮЛИ ДЛЯ ТОЩЕЙ КИШКИ И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2019 |
|
RU2759594C1 |
| ИНЪЕКЦИОННОЕ УСТРОЙСТВО ДЛЯ СУБРЕТИНАЛЬНОЙ ДОСТАВКИ ТЕРАПЕВТИЧЕСКОГО СРЕДСТВА | 2017 |
|
RU2740842C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ЭЛЕМЕНТАМИ УПРАВЛЕНИЯ, ПРИГОДНЫМИ ДЛЯ РАБОТЫ ОДНОЙ РУКОЙ | 2009 |
|
RU2489099C2 |
| ПОЛОВИНА БАРАБАНА, СТАНОК ДЛЯ СБОРКИ ШИН И СПОСОБ ЭКСПЛУАТАЦИИ СТАНКА ДЛЯ СБОРКИ ШИН | 2017 |
|
RU2748886C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СНАБЖЕННЫЙ ГИБКИМ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ | 2016 |
|
RU2719947C2 |
| УСТРОЙСТВА ДЛЯ ПОЗИЦИОНИРОВАНИЯ В СТВОЛЕ СКВАЖИНЫ (ВАРИАНТЫ) И СПОСОБЫ ПОЗИЦИОНИРОВАНИЯ СКВАЖИННОГО ИНСТРУМЕНТА В СТВОЛЕ СКВАЖИНЫ И ИЗМЕРЕНИЯ СТВОЛА СКВАЖИНЫ | 2005 |
|
RU2378508C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С МЕХАНИЗМОМ ЗАПУСКА, ЧУВСТВИТЕЛЬНЫМ К НАГРУЗКЕ | 2009 |
|
RU2499567C2 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| МОТОРИЗОВАННОЕ УСТРОЙСТВО ДЛЯ СЕЛЬСКОГО ХОЗЯЙСТВА | 2016 |
|
RU2713304C2 |





Группа изобретений относится к медицине. Устройство по первому варианту содержит механический механизм позиционирования, механизм управления и соединительное устройство. Механический механизм позиционирования выполнен с конфигурацией, обеспечивающей возможность соединения его с инструментом вне тела пациента и перемещения инструмента относительно тела пациента. Механический механизм позиционирования включает первый узел перемещения, присоединенный к первому элементу опоры. Первый узел перемещения способен к перемещению в первом направлении. Первый элемент опоры выполнен с возможностью осуществления поворота инструмента вокруг первой оси через точку поворота во время перемещения первого узла перемещения в первом направлении. Соединительное устройство соединено в рабочем положении с механизмом управления и механическим механизмом позиционирования. Механизм управления выполнен с конфигурацией, обеспечивающей перемещение инструмента посредством механизма позиционирования за счет передачи усилия, приложенного человеком к механизму управления, посредством соединительного устройства. Первый элемент опоры имеет ось вращения, предусмотренную для обеспечения поворота инструмента вокруг первой оси. Механический механизм позиционирования содержит второй узел перемещения, второй элемент опоры и направляющий элемент. Второй узел перемещения установлен на первом узле перемещения и является подвижным относительно первого узла перемещения во втором направлении. Второй элемент опоры предусмотрен для обеспечения поворота инструмента вокруг второй оси через точку поворота во время перемещения второго узла перемещения во втором направлении. Направляющий элемент расположен на расстоянии от оси вращения первого элемента опоры. Направляющий элемент при работе связан со вторым узлом перемещения для ограничения поворота инструмента вокруг второй оси. Устройство по второму варианту содержит механизм позиционирования, хирургический инструмент, механизм управления и соединительное устройство. Механизм позиционирования соединен с опорной конструкцией. Механизм позиционирования и опорная конструкция расположены вне тела пациента. Хирургический инструмент соединен с механизмом позиционирования и проходит в тело пациента. Механизм позиционирования выполнен с возможностью перемещения инструмента относительно тела пациента. Механизм позиционирования включает первый узел перемещения, соединенный с первым элементом опоры, где первый узел перемещения способен к перемещению в первом направлении и первый элемент опоры предусмотрен для осуществления поворота инструмента вокруг первой оси через точку поворота при перемещении первого узла перемещения в первом направлении. Соединительное устройство соединено в рабочем положении с механизмом управления и механизмом позиционирования. Механизм управления выполнен с конфигурацией, обеспечивающей перемещение инструмента относительно тела пациента посредством механизма позиционирования за счет передачи механических или гидравлических управляющих сигналов посредством соединительного устройства. Первый элемент опоры имеет ось вращения, обеспечивающую поворот инструмента вокруг первой оси. Механизм позиционирования содержит второй узел перемещения, второй элемент опоры и направляющий элемент. Второй узел перемещения установлен на первом узле перемещения и является подвижным относительно первого узла перемещения во втором направлении. Второй элемент опоры предусмотрен для обеспечения поворота инструмента вокруг второй оси через точку поворота во время перемещения второго узла перемещения во втором направлении. Направляющий элемент расположен на расстоянии от оси вращения первого элемента опоры. Направляющий элемент при работе связан со вторым узлом перемещения для ограничения поворота инструмента вокруг второй оси. Способ включает в себя крепление механизма позиционирования к опорной конструкции, при этом механизм позиционирования и опорная конструкция расположены вне тела пациента; введение инструмента в тело пациента, при этом инструмент присоединен к механизму позиционирования; и манипулирование механизмом управления, соединенным в рабочем положении с механизмом позиционирования, при этом манипулирование механизмом управления обеспечивает перемещение инструмента относительно тела пациента посредством механизма позиционирования. В механизм позиционирования включен первый узел перемещения, присоединенный к первому элементу опоры. Первый узел перемещения способен к перемещению в первом направлении. Первый элемент опоры выполнен с возможностью осуществления поворота инструмента вокруг первой оси через точку поворота во время перемещения первого узла перемещения в первом направлении. Первый элемент опоры имеет ось вращения, предусмотренную для обеспечения поворота инструмента вокруг первой оси. В механический механизм позиционирования также включают: второй узел перемещения, который устанавливают на первом узле перемещения и выполняют подвижным относительно первого узла перемещения во втором направлении; второй элемент опоры, который предусматривают для обеспечения поворота инструмента вокруг второй оси через точку поворота во время перемещения второго узла перемещения во втором направлении; и направляющий элемент, который располагают на расстоянии от оси вращения первого элемента опоры, причем направляющий элемент при работе связан со вторым узлом перемещения для ограничения поворота инструмента вокруг второй оси. Изобретения обеспечивают простоту наладки и использования, возможность управления им непосредственно пользователем и обеспечение надежного удерживания инструмента. 3 н. и 19 з.п. ф-лы, 11 ил.
1. Устройство, предназначенное для использования при позиционировании инструмента, предназначенного для использования при хирургической операции, содержащее:
механический механизм позиционирования, выполненный с конфигурацией, обеспечивающей возможность соединения его с инструментом вне тела пациента и перемещения инструмента относительно тела пациента, при этом механический механизм позиционирования включает первый узел перемещения, присоединенный к первому элементу опоры, причем первый узел перемещения способен к перемещению в первом направлении, и первый элемент опоры выполнен с возможностью осуществления поворота инструмента вокруг первой оси через точку поворота во время перемещения первого узла перемещения в первом направлении;
механизм управления; и
соединительное устройство, соединенное в рабочем положении с механизмом управления и механическим механизмом позиционирования, при этом механизм управления выполнен с конфигурацией, обеспечивающей перемещение инструмента посредством механизма позиционирования за счет передачи усилия, приложенного человеком к механизму управления, посредством соединительного устройства,
при этом первый элемент опоры имеет ось вращения, предусмотренную для обеспечения поворота инструмента вокруг первой оси;
отличающееся тем, что механический механизм позиционирования содержит:
второй узел перемещения, установленный на первом узле перемещения и являющийся подвижным относительно первого узла перемещения во втором направлении;
второй элемент опоры, который предусмотрен для обеспечения поворота инструмента вокруг второй оси через точку поворота во время перемещения второго узла перемещения во втором направлении; и
направляющий элемент, расположенный на расстоянии от оси вращения первого элемента опоры, причем направляющий элемент при работе связан со вторым узлом перемещения для ограничения поворота инструмента вокруг второй оси.
2. Устройство по п.1, в котором соединительное устройство содержит гидравлическую систему.
3. Устройство по п.2, в котором гидравлическая система содержит гидравлическую систему с замкнутым контуром.
4. Устройство по п.1, в котором соединительное устройство содержит систему с тросиком толкающе-тянущего типа.
5. Устройство по п.1, в котором соединительное устройство содержит систему тросиков и шкивов.
6. Устройство по п.1, в котором соединительное устройство содержит более одного компонента из гидравлической системы, системы с тросиком толкающе-тянущего типа и системы тросиков и шкивов.
7. Устройство по любому из пп.1-6, в котором механизм позиционирования выполнен с конфигурацией, обеспечивающей возможность использования ткани пациента для создания точки поворота для установки инструмента внутри тела пациента.
8. Устройство по любому из пп.1-6, в котором механизм позиционирования содержит нежесткие обеспечивающие поворот элементы.
9. Устройство по п.7, в котором механизм позиционирования содержит нежесткие обеспечивающие поворот элементы.
10. Устройство по любому из пп.1-6, в котором механизм позиционирования содержит тормозное устройство, выполненное с конфигурацией, обеспечивающей возможность фиксации инструмента в определенном положении, и при этом механизм управления содержит приводное устройство для указанного тормозного устройства.
11. Устройство по п.7, в котором механизм позиционирования содержит тормозное устройство, выполненное с конфигурацией, обеспечивающей возможность фиксации инструмента в определенном положении, и при этом механизм управления содержит приводное устройство для указанного тормозного устройства.
12. Устройство по п.8, в котором механизм позиционирования содержит тормозное устройство, выполненное с конфигурацией, обеспечивающей возможность фиксации инструмента в определенном положении, и при этом механизм управления содержит приводное устройство для указанного тормозного устройства.
13. Устройство, предназначенное для использования при позиционировании инструмента, предназначенного для использования при хирургической операции, содержащее:
механизм позиционирования, соединенный с опорной конструкцией, при этом механизм позиционирования и опорная конструкция расположены вне тела пациента;
хирургический инструмент, соединенный с механизмом позиционирования и проходящий в тело пациента, при этом механизм позиционирования выполнен с возможностью перемещения инструмента относительно тела пациента, причем механизм позиционирования включает первый узел перемещения, соединенный с первым элементом опоры, где первый узел перемещения способен к перемещению в первом направлении, и первый элемент опоры предусмотрен для осуществления поворота инструмента вокруг первой оси через точку поворота при перемещении первого узла перемещения в первом направлении;
механизм управления; и
соединительное устройство, соединенное в рабочем положении с механизмом управления и механизмом позиционирования, при этом механизм управления выполнен с конфигурацией, обеспечивающей перемещение инструмента относительно тела пациента посредством механизма позиционирования за счет передачи механических или гидравлических управляющих сигналов посредством соединительного устройства,
при этом первый элемент опоры имеет ось вращения, обеспечивающую поворот инструмента вокруг первой оси;
отличающееся тем, что механизм позиционирования содержит:
второй узел перемещения, установленный на первом узле перемещения и являющийся подвижным относительно первого узла перемещения во втором направлении;
второй элемент опоры, который предусмотрен для обеспечения поворота инструмента вокруг второй оси через точку поворота во время перемещения второго узла перемещения во втором направлении; и
направляющий элемент, расположенный на расстоянии от оси вращения первого элемента опоры, причем направляющий элемент при работе связан со вторым узлом перемещения для ограничения поворота инструмента вокруг второй оси.
14. Способ позиционирования инструмента, предназначенного для использования при хирургической операции, относительно пациента, при этом способ включает в себя:
крепление механизма позиционирования к опорной конструкции, при этом механизм позиционирования и опорная конструкция расположены вне тела пациента;
введение инструмента в тело пациента, при этом инструмент присоединен к механизму позиционирования; и
манипулирование механизмом управления, соединенным в рабочем положении с механизмом позиционирования, при этом манипулирование механизмом управления обеспечивает перемещение инструмента относительно тела пациента посредством механизма позиционирования, где в механизм позиционирования включают первый узел перемещения,
присоединенный к первому элементу опоры, причем первый узел перемещения способен к перемещению в первом направлении, и первый элемент опоры выполнен с возможностью осуществления поворота инструмента вокруг первой оси через точку поворота во время перемещения первого узла перемещения в первом направлении; и
первый элемент опоры имеет ось вращения, предусмотренную для обеспечения поворота инструмента вокруг первой оси;
отличающийся тем, что в механический механизм позиционирования также включают:
второй узел перемещения, который устанавливают на первом узле перемещения и выполняют подвижным относительно первого узла перемещения во втором направлении;
второй элемент опоры, который предусматривают для обеспечения поворота инструмента вокруг второй оси через точку поворота во время перемещения второго узла перемещения во втором направлении; и направляющий элемент, который располагают на расстоянии от оси вращения первого элемента опоры, причем направляющий элемент при работе связан со вторым узлом перемещения для ограничения поворота инструмента вокруг второй оси.
15. Способ по п.14, в котором при манипулировании механизмом управления обеспечивают перемещение инструмента посредством механизма позиционирования за счет передачи механического усилия от механизма управления механизму позиционирования.
16. Способ по п.15, в котором механическое усилие передают посредством использования системы с тросиком толкающе-тянущего типа.
17. Система по п.15, в которой механическое усилие передают посредством использования системы тросиков и шкивов.
18. Способ по п.14, в котором при манипулировании механизмом управления обеспечивают перемещение инструмента посредством механизма позиционирования за счет передачи гидравлических сигналов от механизма управления механизму позиционирования.
19. Способ по п.14, в котором инструмент присоединяют к механизму позиционирования после введения инструмента в тело пациента.
20. Способ по п.14, в котором инструмент присоединяют к механизму позиционирования перед введением инструмента в тело пациента.
21. Способ по п.14, в котором манипулирование механизмом управления включает в себя приложение человеком усилия к механизму управления, в результате чего усилие, приложенное человеком, передается механизму позиционирования.
| US 6206890 B1, 27.03.2001 | |||
| US 2005119641 A1, 02.02.2005 | |||
| US 6131480 A, 17.10.2000 | |||
| СТЕРЕОТАКСИЧЕСКИЙ АППАРАТ | 2002 |
|
RU2218124C1 |
| Стереотаксический аппарат | 1990 |
|
SU1806678A1 |
| Микроманипулятор | 1990 |
|
SU1803066A1 |

