Изобретение относится к области точного позиционирования рельсового транспортного средства (РТС) и может быть использовано при управлении РТС для его точной остановки на платформе в режиме автоматического управления.
Известно устройство для оценки положения объекта, содержащее детектор положений ориентиров, выполненный с возможностью обнаружения положения ориентира для ориентира, присутствующего в окружении подвижного объекта, детектор величины перемещения, выполненный с возможностью обнаружения величины перемещения подвижного объекта, модуль накопления положений ориентиров, выполненный с возможностью накопления, в качестве фрагментов данных положений ориентиров, положений ориентиров, каждое из которых получается посредством перемещения положения ориентира, обнаруженного посредством детектора положений ориентиров, на величину перемещения, обнаруженную посредством детектора величины перемещения, модуль получения картографической информации, выполненный с возможностью получения картографической информации, включающей в себя положения ориентиров для ориентиров, присутствующих на карте, и модуль оценки собственного положения, выполненный с возможностью сопоставления фрагментов данных положений ориентиров в определенной области с положениями ориентиров, включенными в картографическую информацию, и оценки собственного положения подвижного объекта, причем определенная область задается на основании факторов ошибки в записях перемещения подвижного объекта, движущегося в текущее положение. (RU 2668459 C1, G05D 1/02, 01.10.2018).
Недостатками данного устройства являются быстрая потеря точности оценки положения объекта при потере сигнала GPS, а также длительное время установления стационарного режима работы.
Известно устройство для управления сетью мобильных роботизированных устройств, содержащее процессор, блок памяти, сенсоры местоположения (GPS - антенны), сенсоры окружающей среды (обычные и стереокамеры, инфракрасные датчики и камеры, радары, лидары), модуль управления приводами, детектор изменения параметров задачи мониторинга, сетевой приемник/передатчик, детектор целевого объекта, блок памяти. Для управления мобильными роботизированным устройством получают и обрабатывают данные о его текущем местоположении, среде и других устройствах сети, решают задачу управления движением по маршруту исходя из информации об обнаружении целевого объекта (RU 2676518 С1, G05B 15/00, 29.12.2018).
Недостатками данного устройства являются существенная потеря точности оценки положения объекта при потере сигнала GPS и отсутствие возможности работы в автономном режиме - при пропадании сигналов GPS и невалидности данных от сенсоров окружающей среды.
Наиболее близким аналогом является устройство для создания сигнала (Sx) местоположения, который указывает место положения транспортного средства, в частности колейного транспортного средства, содержащее устройство для измерения расстояния на основе разделенных изображений или совпадения контуров, которое на стороне выхода создает два частичных изображения окружения транспортного средства, расположенную после устройства для измерения расстояния на основе разделенных изображений или совпадения контуров камеру для записи частичных изображений и соединенное с камерой устройство обработки данных, которое выполнено так, что оно в рамках обработки изображений распознает заранее записанные в память опорный объект в записанных частичных изображениях и за счет оценки частичных изображений опорного объекта создает сигнал местоположения (RU 2509021 C2, D61L 25/02, 17.12.2009).
Недостатками устройства являются его сильная зависимость от прозрачности воздуха и невозможность проводить измерения в плохую погоду и при невалидности данных камеры, в том числе при невозможности зафиксировать в поле зрения опорный объект.
Технический результат предлагаемого изобретения заключается в повышении точности и надежности позиционирования РТС в любых погодных условиях, а также в условиях нестабильного спутникового навигационного сигнала для управления движением, в том числе в автоматическом режиме, за счет комплексирования данных навигационных параметров от сенсоров различного физического принципа действия и смежных устройств, а также цифровой модели пути.
Технический результат достигается тем, что бортовое устройство позиционирования рельсового транспортного средства содержит установленные на рельсовом транспортном средстве спутниковый навигационный приемник, инерциальный навигационный блок, блок обработки данных датчиков пути и скорости, подключенный к колесному одометру рельсового транспортного средства, блок обработки данных лидаров, связанный с системой технического зрения блока обнаружения препятствий рельсового транспортного средства, и вычислитель, включающий последовательно соединенные блок мониторинга, блок оценки, блок вычитания и компаратор, а также блок памяти, при этом блок мониторинга выполнен в виде вычислительного модуля, память которого включает цифровую модель пути, выход блока обработки данных лидаров подключен к входам блока памяти и блока мониторинга, другой вход которого соединен с выходом спутникового навигационного приемника, а выход - с входами управления блока обработки данных датчиков пути и скорости, блока оценки и блока памяти, подключенного выходом к другому входу блока вычитания, другие входы блока оценки соединены с выходами инерциального навигационного блока и блока обработки данных датчиков пути и скорости, а второй выход - с первым входом устройства управления рельсовым транспортным средством, второй и третий вход которого подключены соответственно к выходам компаратора и блока вычитания.
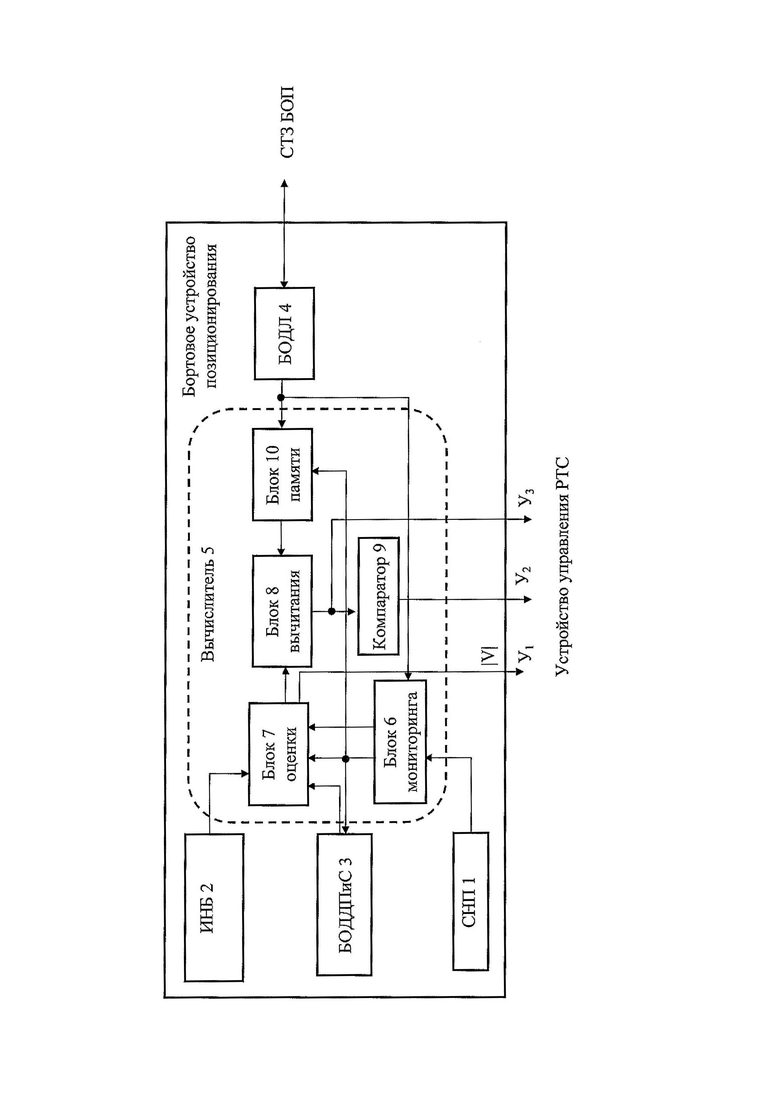
Сущность изобретения поясняется чертежом, на котором представлена структурная схема бортового устройства позиционирования РТС.
Бортовое устройство позиционирования рельсового транспортного средства содержит установленные на рельсовом транспортном средстве спутниковый навигационный приемник 1 (СНП 1), инерциальный навигационный блок 2 (ИНБ 2), состоящий из трех микромеханических акселерометров, блок 3 обработки данных датчиков пути и скорости (БОДДПиС 3), блок 4 обработки данных лидаров (БОДЛ 4), связанный с системой технического зрения (СТЗ) блока обнаружения препятствий (БОП) рельсового транспортного средства и вычислитель 5, включающий последовательно соединенные блок 6 мониторинга, блок 7 оценки, блок 8 вычитания и компаратор 9, а также блок 10 памяти.
Блок 6 мониторинга выполнен в виде вычислительного модуля, память которого включает цифровую модель пути (ЦМП). СНП 1 в варианте выполнения устройства выполнен двух канальным. БОДДПиС 3 подключен к не менее чем двум датчикам пути и скорости (на чертеже не показан), расположенных на осях разных колесных пар РТС.
При этом выход блока 4 обработки данных лидаров подключен к входам блока 10 памяти и блока 6 мониторинга, другой вход которого соединен с выходом СНП 1, а выход - с входами управления блока 3 обработки данных датчиков пути и скорости, блока 7 оценки и блока 10 памяти, подключенного выходом к другому входу блока 8 вычитания. Другие входы блока 4 оценки соединены с выходами акселерометров ИНБ 2 и БОДДПиС 3, а второй выход - с первым входом устройства управления рельсовым транспортным средством (на чертеже не показан), второй и третий вход которого подключены соответственно к выходам компаратора 9 и блока 8 вычитания.
Бортовое устройство позиционирования рельсового транспортного средства функционирует следующим образом.
В режиме реального времени с выхода СНП 1 на вход блока 6 мониторинга поступают текущие координаты РТС.СНП 1 определяет координаты РТС путем комплексирования навигационных данных от двух каналов приема навигационных сигналов. Наличие ЦМП в блоке 6 мониторинга и данных о текущих координатах РТС позволяет решить задачу привязки РТС к пути и далее определять расстояния до заданных инфраструктурных (опорных) элементов на пути его следования.
При подъезде к платформе для определения расстояния РТС до знака «остановка первого вагона», координаты которого известны в ЦМП, блок 6 мониторинга определяет текущее расстояние РТС до знака «остановки первого вагона». Нарушение доступности навигационных сигналов ГНСС или действие помех при подъезде к станции приводит к невалидности данных СНП 1. В этом случае для дальнейшего высокоточного определения положения РТС и расстояния РТС до знака «остановки первого вагона» блок 6 мониторинга использует данные блока 4 обработки данных лидаров.
БОДЛ 4 осуществляет обработку и согласование с вычислителем 5 данных измерений, полученных от лидаров системы технического зрения. Результаты обработки в каждый текущий момент времени в виде значений расстояния до знака «остановка первого вагона» БОДЛ 4 передает в блок 6 мониторинга и блок 10 памяти вычислителя 5.
Блок 6 мониторинга с использованием ЦМП на основании данных о расстоянии до знака «остановка первого вагона» определяет текущую координату РТС и определяет проекции линейной скорости РТС в бортовой системе координат (СК).
Как известно, на определенном расстоянии от знака «остановка первого вагона» лидар перестает обеспечивать его «захват» (так называемая «мертвая зона»). В этом случае и данные с лидаров системы технического зрения не поступают на вход БОДЛ 4, а, следовательно, в блок 6 мониторинга также не поступают от БОДЛ 4 данные измерения расстояний до знака «остановка первого вагона».
При отсутствии данных от БОДЛ 4 блок 6 мониторинга формирует управляющие сигналы, инициирующие передачу из блока 10 памяти в блок 8 вычитания результата обработки БОДЛ 4 последнего измерения расстояния до знака «остановка первого вагона» лидарами системы технического зрения, одновременно осуществляет включение в работу блока 7 оценки и установку блока 3 обработки данных датчиков пути и скорости РТС в исходное (нулевое) состояние.
В блок 7 оценки поступают значения ускорений центра масс РТС с выхода акселерометров ИНБ 2, значения скорости РТС с выхода БОДДПиС 3 устройства и значения проекций вектора скорости РТС в бортовой СК с информационного выхода блока 6 мониторинга.
БОДДПиС 3 вычисляет значения скорости РТС в реальном времени путем комплексирования данных от не менее чем двух датчиков пути и скорости.
На основе полученных данных блок 7 оценки вычисляет с высокой точностью текущие значения модуля скорости РТС  и текущие значения приращения пути
и текущие значения приращения пути  . Текущие значения модуля скорости РТС
. Текущие значения модуля скорости РТС  блок 7 оценки передает в устройство управления, а текущие значения приращения пути
блок 7 оценки передает в устройство управления, а текущие значения приращения пути  на вход блока 8 вычитания. Блок 8 вычитания вычисляет текущее расстояние до знака «остановка первого вагона» как разность значений начального расстояния до знака «остановка первого вагона», полученного из блока 10 памяти, и приращения пути
на вход блока 8 вычитания. Блок 8 вычитания вычисляет текущее расстояние до знака «остановка первого вагона» как разность значений начального расстояния до знака «остановка первого вагона», полученного из блока 10 памяти, и приращения пути  . Значение текущего расстояния до знака «остановка первого вагона» блок 8 вычитания передает на соответствующий вход устройства управления и на вход компаратора 9, функционирующего в режиме нуль-индикации.
. Значение текущего расстояния до знака «остановка первого вагона» блок 8 вычитания передает на соответствующий вход устройства управления и на вход компаратора 9, функционирующего в режиме нуль-индикации.
В устройстве управления по текущим значениям модуля скорости РТС и текущего расстояния до знака «остановка первого вагона» формируется соответствующее управление скоростью РТС в режиме служебного торможения, а на выходе компаратора 9 по достижении нулевого значения расстояния до знака «остановка первого вагона» формируется сигнал фиксации момента прохождения знака остановки, поступающий на соответствующий вход устройства управления. В момент прохождения нулевого значения компаратора 9 РТС должен остановиться.
Блок 7 оценки обеспечивает высокоточную оценку модуля скорости  и текущего приращения пути от границы «мертвой зоны»
и текущего приращения пути от границы «мертвой зоны»  и работает следующим образом.
и работает следующим образом.
Полагая отрезок пути перед знаком «остановка первого вагона» прямолинейным, а также, что на данном участке торможения модуль скорости совпадает с продольной осью РТС, выходной сигнал Z БОДДПиС 3, пропорциональный длине пройденного пути, можно представить следующим образом:

где WQ - помеха измерения, описываемая в наиболее общем случае белым гауссовским шумом (БГШ) с нулевым математическим ожиданием и дисперсией DQ.
Помимо сигнала блока 3 для получения высокоточной оценки текущего приращения  блок 7 оценки использует также измерения модуля скорости
блок 7 оценки использует также измерения модуля скорости  по проинтегрированным показаниям ускорения трех ортогональных акселерометров
по проинтегрированным показаниям ускорения трех ортогональных акселерометров  инерциального измерительного блока 2.
инерциального измерительного блока 2.
Поскольку вектор ускорения в бортовой системе координат (СК)  измеряемый акселерометрами ИНБ 2 равен:
измеряемый акселерометрами ИНБ 2 равен:
где  - вектор ускорения, обусловленного движением РТС, в топоцентрической СК,
- вектор ускорения, обусловленного движением РТС, в топоцентрической СК,
 - вектор гравитационного ускорения в топоцентрической СК,
- вектор гравитационного ускорения в топоцентрической СК,
А - матрица ориентации (направляющих косинусов) бортовой СК относительно топоцентрической СК,
то, учитывая, что на участке торможения ориентация бортовой СК (трехгранника акселерометров) относительно топоцентрической СК практически неизменна (^4=const), вектор скорости РТС в бортовой СК может быть представлен как:
где V - вектор скорости, обусловленной движением РТС в топоцентрической СК.
Соответственно, модуль скорости в бортовой СК равен

где А1А=Е, Е - единичная матрица.
На участке торможения модуль скорости совпадает с продольной осью РТС и ориентация бортовой СК (трехгранника акселерометров) относительно топоцентрической СК практически неизменна, то вертикальной составляющей скорости Vz РТС можно пренебречь. В этом случае
и модуль скорости собственного движения РТС в топоцентрической СК равен

где вектор скорости в бортовой СК W может быть определен по измерениям трех акселерометров ИНБ 2 следующим образом:

где -показания акселерометров,
-показания акселерометров,
W0x,y,z - начальные значения проекций скорости РТС в бортовой СК. Таким образом, модуль скорости собственного движения РТС в топоцентрической СК, определяемый в блоке 7 оценки по измерениям трех акселерометров блока акселерометров 1, может быть представлен как:

В силу того, что измерения акселерометров осуществляются с неизбежными ошибками, то сигнал измерения, пропорциональный модулю скорости  можно записать следующим образом:
можно записать следующим образом:

где Ws - помеха измерения, описываемая в наиболее общем случае БГШ с нулевым математическим ожиданием и дисперсией Ds.
Далее в блоке 7 оценки решается задача - по измерениям (1), (2) оценить с минимальной ошибкой текущее значение приращения пути  , определяющее положение РТС на участке торможения. Для оптимального ее решения используется фильтр Калмана, как обеспечивающий минимум среднеквадратической ошибки оценивания.
, определяющее положение РТС на участке торможения. Для оптимального ее решения используется фильтр Калмана, как обеспечивающий минимум среднеквадратической ошибки оценивания.
Для возможности его применения блок 7 использует переменную  дифференциальное уравнение которой имеет вид:
дифференциальное уравнение которой имеет вид:
или, с учетом уравнения (2):

Таким образом, решается задача линейной фильтрации переменной  , описываемой уравнением (3), по измерениям (1):
, описываемой уравнением (3), по измерениям (1):
Уравнения оценки в данном случае принимают вид (с учетом  ):
):


и допускают аналитическое решение
Оценка (4) является оптимальной в среднеквадратическом аналитическом решении задачи позиционирования РТС для выбранного состава измерителей и определяется непосредственно в блоке 7 оценки вычислителя 5.
Для высокоточного определения модуля скорости РТС , поступающего с блока 7 оценки на вход устройства управления и используемого в алгоритмах управления РТС, осуществляется дифференцирование по времени полученной оценки (4).
Простота данного устройства, обеспечивающего при этом возможность высокоточного определения текущего положения РТС в реальном времени, позволяет эффективно решать задачи навигации и управления как современными, так и перспективными РТС.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бортовое устройство для диагностики состояния рельсового пути | 2019 |
|
RU2704692C1 |
| Система управления движением поездов в режиме виртуальной сцепки | 2024 |
|
RU2828911C1 |
| Система для мониторинга и контроля состояния рельсового пути | 2017 |
|
RU2652338C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| КОМПЛЕКС РАСПРЕДЕЛЕННОГО УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНЫМИ РОБОТАМИ ДЛЯ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2019 |
|
RU2717047C1 |
| Система контроля готовности фронта к проведению машинизированной выправки железнодорожного пути | 2022 |
|
RU2793867C1 |
| Система интервального регулирования движения поездов | 2021 |
|
RU2753990C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ПЕРЕВОЗОК ГРУЗОВ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТОМ | 2010 |
|
RU2466460C2 |
| Способ позиционирования подвижного транспортного объекта | 2023 |
|
RU2811665C1 |
| Система интервального регулирования движения поездов | 2020 |
|
RU2746629C1 |
Изобретение относится к области точного позиционирования рельсового транспортного средства (РТС) и может быть использовано при управлении РТС в режиме автоматического управления. Сущность предлагаемого изобретения заключается в следующем. Бортовое устройство позиционирования содержит установленные на РТС спутниковый навигационный приемник (СНП), инерциальный навигационный блок (ИНБ), блок обработки данных датчиков пути и скорости (БОДДПиС), блок обработки данных лидаров (БОДЛ), связанный с системой технического зрения (СТЗ) блока обнаружения препятствий (БОП) РТС, и вычислитель, включающий последовательно соединенные блок мониторинга, блок оценки, блок вычитания и компаратор, а также блок памяти. При этом блок мониторинга выполнен в виде вычислительного модуля, память которого включает цифровую модель пути (ЦМП), выход БОДЛ подключен к входам блока памяти и блока мониторинга, другой вход которого соединен с выходом СНП, а выход - с входами управления БОДДПиС, блока оценки и блока памяти, подключенного выходом к другому входу блока вычитания, другие входы блока оценки соединены с выходами ИНБ и БОДДПиС, а второй выход - с первым входом устройства управления РТС, второй и третий вход которого подключены соответственно к выходам компаратора и блока вычитания. Техническим результатом заявленного изобретения является повышение точности и надежности позиционирования РТС при любых погодных условиях, нестабильном спутниковом навигационном сигнале. 1 ил.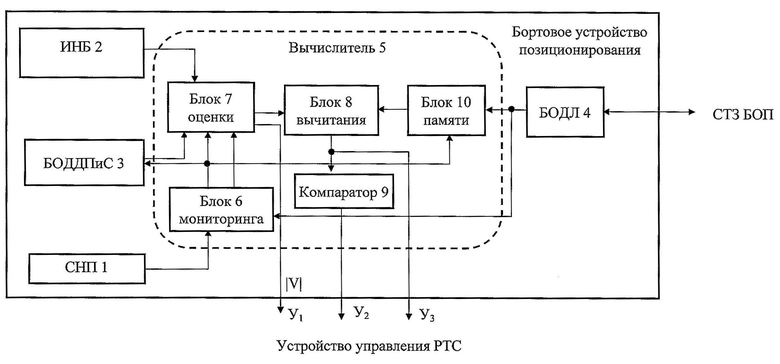
Бортовое устройство позиционирования рельсового транспортного средства, характеризующееся тем, что содержит установленные на рельсовом транспортном средстве спутниковый навигационный приемник, инерциальный навигационный блок, блок обработки данных датчиков пути и скорости, блок обработки данных лидаров, связанный с системой технического зрения блока обнаружения препятствий рельсового транспортного средства, и вычислитель, включающий последовательно соединенные блок мониторинга, блок оценки, блок вычитания и компаратор, а также блок памяти, при этом блок мониторинга выполнен в виде вычислительного модуля, память которого включает цифровую модель пути, выход блока обработки данных лидаров подключен к входам блока памяти и блока мониторинга, другой вход которого соединен с выходом спутникового навигационного приемника, а выход – с входами управления блока обработки данных датчиков пути и скорости, блока оценки и блока памяти, подключенного выходом к другому входу блока вычитания, другие входы блока оценки соединены с выходами инерциального навигационного блока и блока обработки данных датчиков пути и скорости, а второй выход – с первым входом устройства управления рельсовым транспортным средством, второй и третий вход которого подключены соответственно к выходам компаратора и блока вычитания.
| DE 102008028486 A1, 31.12.2009 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СЕТЬЮ МОБИЛЬНЫХ РОБОТИЗИРОВАННЫХ УСТРОЙСТВ | 2018 |
|
RU2676518C1 |
| WO 2017079290 A1, 11.05.2017 | |||
| US 20180172455 A1, 21.06.2018 | |||
| US 20160169683 A1, 16.06.2016. | |||

