Изобретение относится к области систем автоматического управления (САУ) углом тангажа летательного аппарата (ЛА).
Известны САУ, обеспечивающие отработку заданного угла тангажа ЛА с помощью автопилота, воздействующего на угол отклонения руля высоты ЛА [1].
Для реализации известных способов управления ЛА применяют методы модального управления, основанные на выборе полюсов передаточной функции замкнутой системы или корней ее характеристического уравнения. Если все составляющие вектора состояния объекта могут быть измерены и модель динамики объекта линейна, то обеспечение заданного расположения корней замкнутой системы не вызывает трудности. Требуемое расположение корней характеристического уравнения для каждого объекта определяется в отдельности.
Если передаточная функция замкнутой системы не содержит нулей, то решение задачи требуемого расположения корней характеристического уравнения можно осуществить с помощью классического метода стандартных коэффициентов. Далее оценка соответствия полученных коэффициентов знаменателя передаточной функции оценивается по характеру переходных процессов в замкнутой системе.
Существующие методы автоматического управления ЛА требуют корректировки в полете передаточных чисел законов управления в зависимости от изменения угла атаки при изменении аэродинамических и массоинерционных характеристик объекта.
Наиболее близкой по достигаемому техническому результату, выбранной в качестве прототипа, принимается САУ углом тангажа ЛА, реализующая астатический закон управления со скоростной обратной связью, содержащая последовательно соединенные задатчик угла тангажа и вычислитель автопилота угла тангажа, сервопривод, выходной сигнал которого определяет угол отклонения руля высоты летательного аппарата, датчик угла тангажа летательного аппарата, имеющий выход, подключенный к второму входу вычислителя автопилота угла тангажа [2].
Поставленная задача, которую решает это изобретение, достигается тем, что система автоматического управления углом тангажа и ограничения угла атаки летательного аппарата содержит последовательно соединенные задатчик угла тангажа и вычислитель автопилота угла тангажа, сервопривод, выходной сигнал которого определяет угол отклонения руля высоты летательного аппарата, датчик угла тангажа летательного аппарата, имеющий выход, подключенный к второму входу вычислителя автопилота угла тангажа, последовательно соединенные задатчик максимального угла атаки, вычислитель автомата ограничения угла атаки и селектор минимального сигнала, выход которого подключен к входу сервопривода, датчик угловой скорости крена летательного аппарата, имеющий выход, подключенный к второму входу вычислителя автомата ограничения угла атаки, выход вычислителя автопилота угла тангажа подключен к второму входу селектора минимального сигнала.
Недостатком этого изобретения является необходимость корректировки в полете передаточных чисел законов управления в зависимости от изменения угла атаки, при изменении аэродинамических и массоинерционных характеристик объекта и результат работы такого регулятора не удовлетворяет требованиям летчика по обеспечению минимума психической и физической нагрузок при работе по наземным и воздушным целям.
Технический результат предлагаемого авторами изобретение заключается в решении задачи улучшения характеристик управления ЛА с помощью построения алгоритма синтеза управления ЛА в продольной плоскости.
Технический результат достигается за счет построения желаемой модели на основании критерия Шомбера-Гертсена [3], который подразумевает разделение на два типа управления самолетом на тангажное и перегрузочное, за границу принято значение  (
( - частная производная нормальной перегрузки по углу атаки). Для получения процессов в контуре управления, близких к апериодическим, на основании критерия Шомбера-Гертсена можно сформировать требования к желаемым значениям параметров объекта
- частная производная нормальной перегрузки по углу атаки). Для получения процессов в контуре управления, близких к апериодическим, на основании критерия Шомбера-Гертсена можно сформировать требования к желаемым значениям параметров объекта  и
и  (
( - производная приведенной к произведению массы ЛА на скорость установившегося полета аэродинамической подъемной силы крыла по углу атаки,
- производная приведенной к произведению массы ЛА на скорость установившегося полета аэродинамической подъемной силы крыла по углу атаки, - производная приведенного к моменту инерции относительно связанной оси Oz момента тангажа по углу атаки). При
- производная приведенного к моменту инерции относительно связанной оси Oz момента тангажа по углу атаки). При  удается получить корни характеристического многочлена системы с большими отрицательными вещественными частями, тем самым выполнить требования к апериодичности переходных процессов в контуре «летчик-система автоматического управления». При этом соотношение
удается получить корни характеристического многочлена системы с большими отрицательными вещественными частями, тем самым выполнить требования к апериодичности переходных процессов в контуре «летчик-система автоматического управления». При этом соотношение  может меняться на ±30%, важно, чтобы это соотношение не выходило за область, удовлетворяющую критерию. На основании этого соотношения формируются линейные дифференциальные уравнения желаемой системы.
может меняться на ±30%, важно, чтобы это соотношение не выходило за область, удовлетворяющую критерию. На основании этого соотношения формируются линейные дифференциальные уравнения желаемой системы.
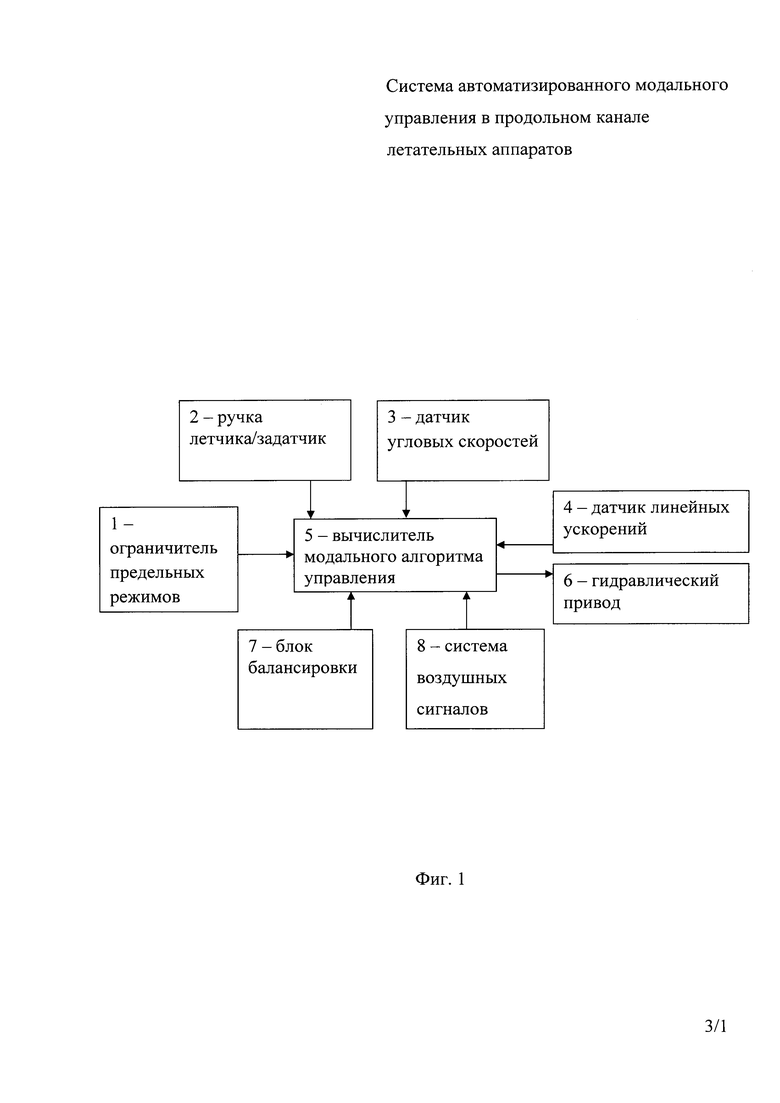
На фигуре 1 представлена функциональная схема системы автоматизированного модального управления (САУ) в продольном канале:
ограничитель предельных режимов (ОПР) 1, состоящий из задатчика максимального угла атаки и вычислителя автомата ограничения угла атаки;
ручка летчика / задатчик угла тангажа (РЛ/ЗТ) 2;
датчик угловых скоростей (ДУС), имеющий в своем составе датчик скорости тангажа 3;
вычислитель автопилота угла тангажа (ВАУТ) 4;
вычислитель алгоритма модального управления (ВАМУ) 5;
сервопривод (СП), в состав которого входит гидравлический привод и селектор минимального сигнала 6;
блок балансировки (ББ) 7;
система воздушных сигналов СВС 8;
датчик угла тангажа (ДУТ) 9.
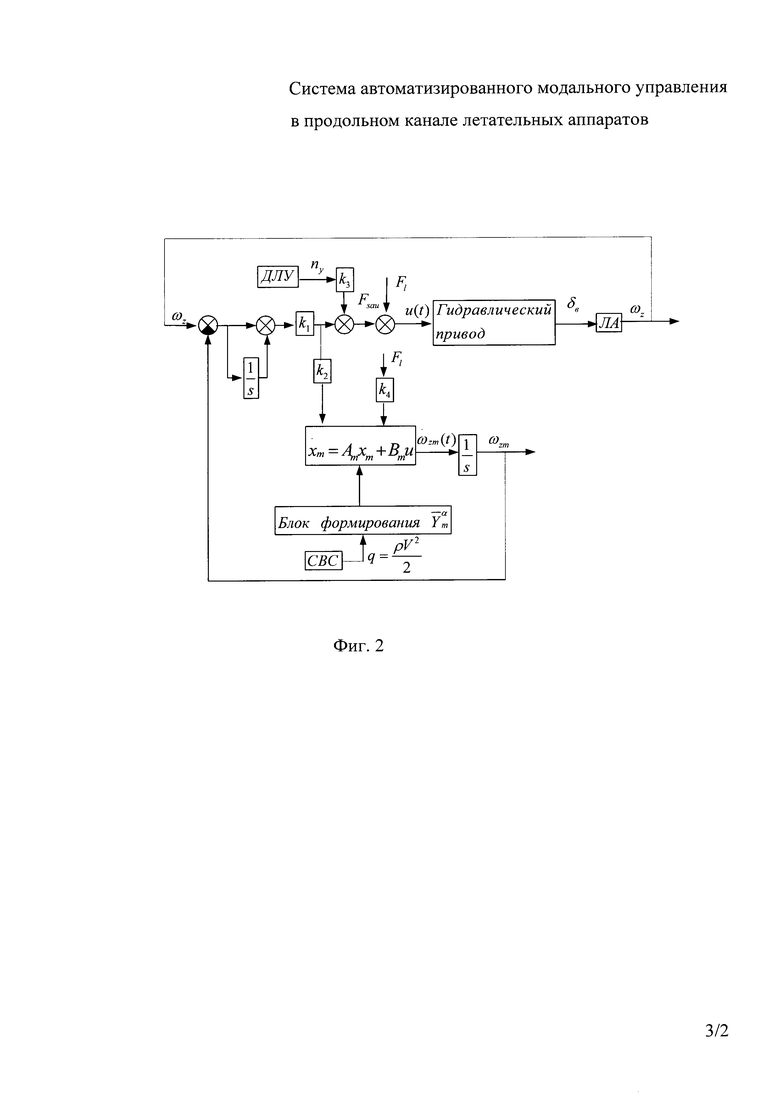
На фигуре 2 представлена структурная схема САУ, где:
1 - ОПР - ограничитель предельных режимов;
2 - РЛ/ЗД - ручка летчика / задатчик угла тангажа;
3 - ДУС - датчик угловых скоростей (ωz);
4 - ВАУТ - вычислитель автопилота угла тангажа;
5 - ВАМУ - вычислитель алгоритма модального управления, в состав которого входят блоки:
БФС - блок формирования сигнала управления  ;
;
БПФ - блок передаточной функции;
БН - блок невязки;
БФСУ - блок формирования сигнала управления (u);
6 - СП - сервопривод;
7 - ББ - блок балансировки;
8 - СВС - система воздушных сигналов;
9 - ДУТ - датчик угла тангажа;
ЛА - летательный аппарат;
xm - вектор состояния модели, Am-(n×n) и Bm-(n×1) - матрицы известных параметров желаемой модели, u(t) - управление, ny - нормальная перегрузка, q - скоростной напор, F1 - сигнал с ручки летчика, ωz - выходной сигнал с датчика угловой скорости тангажа ЛА, ωm - выходной сигнал с желаемой эталонной модели, ki - масштабные коэффициенты закона управления.
Система автоматизированного модального управления в продольном канале летательного аппарата содержит последовательно соединенные ручку пилота/задатчик тангажа и вычислитель автопилота угла тангажа, гидравлический привод и селектор минимального сигнала в составе сервопривода, выходной сигнал которого определяет угол отклонения руля высоты летательного аппарата, датчик угла тангажа летательного аппарата, имеющий выход, подключенный ко второму входу вычислителя автопилота угла тангажа, ограничитель предельных режимов (ОПР), состоящий из последовательно соединенных задатчика максимального угла атаки, вычислителя автомата ограничения угла атаки, выход которого подключен к входу сервопривода, датчик угловой скорости тангажа (ДУС) летательного аппарата, имеющий выход, подключенный к входу вычислителя автомата ограничения угла атаки, выход вычислителя автопилота угла тангажа подключен ко второму входу селектора минимального сигнала, а также блок балансировки. Кроме того, для обеспечения заданного качества управления во всей области применения ЛА при изменении аэродинамических и массоинерционных характеристик угла тангажа введен вычислитель алгоритма модального управления, содержащий программный блок формирования сигнала усредненного приведенного коэффициента подъемной силы  , блок оптимальной по критерию Шомбера-Гертсена передаточной функции системы по сигналу угловой скорости тангажа, блок невязки по угловой скорости тангажа (Δωz), к первому входу которого подключен сигнал с выхода датчика угловой скорости тангажа (ωz), ко второму входу - сигнал угловой скорости тангажа с выхода блока передаточной функции (ωzm), при этом сумма масштабированных астатического сигнала (Δωz/p) и сигнала невязки (Δωz) с выхода блока невязки поступает на вход сервопривода и на первый вход блока передаточной функции, второй вход которого соединен с выходом датчика ручки летчика (задатчиком угла тангажа), и блок, формирующий сигнал управления (u) по правилу:
, блок оптимальной по критерию Шомбера-Гертсена передаточной функции системы по сигналу угловой скорости тангажа, блок невязки по угловой скорости тангажа (Δωz), к первому входу которого подключен сигнал с выхода датчика угловой скорости тангажа (ωz), ко второму входу - сигнал угловой скорости тангажа с выхода блока передаточной функции (ωzm), при этом сумма масштабированных астатического сигнала (Δωz/p) и сигнала невязки (Δωz) с выхода блока невязки поступает на вход сервопривода и на первый вход блока передаточной функции, второй вход которого соединен с выходом датчика ручки летчика (задатчиком угла тангажа), и блок, формирующий сигнал управления (u) по правилу:
 ,
,
на основании данных об угловых скоростях тангажа, получаемых от датчика угловой скорости ЛА и из желаемой эталонной модели, параметры которой настраиваются программным блоком формирования в соответствии с критерием Шомбера-Гертсена в зависимости от величины скоростного напора от СВС.
в соответствии с критерием Шомбера-Гертсена в зависимости от величины скоростного напора от СВС.
Предложенная система формирования управления линеаризует итоговую нелинейную модель объекта. Существенное преимущество предложенного подхода проявляется при управлении самолетом на больших углах атаки, когда характеристики ЛА существенно нелинейны. В итоге нет необходимости ввода в САУ дополнительных сигналов управления.
Литература
1. Боднер В.А. Системы управления летательными аппаратами. - М.: Машиностроение, 1973. - 506 с. Стр. 101, рис. 3.9; 2. Красовский А.А. Системы автоматического управления полетом и их аналитическое конструирование. - М.: Наука, 1973. - 560 с. Стр. 179, рис. 5.2; 3. Михалев И.А., Окоемов Б.Н., Чикулаев М.С. Системы автоматического управления самолетом. - М.: Машиностроение, 1987. - с. 240. Стр. 192, рис. 14.2, стр. 194, рис. 14.4, стр. 198, рис. 14.7, стр. 201, рис. 14.9.
2. Патент RU2434785 Система автоматического управления углом тангажа и ограничения угла атаки летательного аппарата, авторы Петунин В.И., Абдуллина Э.Ю., Ефанов В.Н. МПК В64С 13/18, опубл. 27.11.2011.
3. Shomber Н., Gertsen W., - «Longitudinal Handing Qualities Griteria: an Evaluation AIAA Paptr, N65-780, 1965.
Система автоматизированного модального управления в продольном канале летательного аппарата (ЛА) содержит ручку пилота/задатчик тангажа, вычислитель автопилота угла тангажа, сервопривод, датчик угла тангажа, ограничитель предельных режимов, датчик угловой скорости тангажа, блок балансировки, вычислитель алгоритма модального управления (ВАМУ), система воздушных сигналов, соединенных определенным образом. Сервопривод содержит гидропривод и селектор минимального сигнала. Ограничитель предельных режимов содержит задатчик максимального угла атаки и вычислитель автомата ограничения угла атаки. ВАМУ содержит блок формирования сигнала усредненного приведенного коэффициента подъемной силы, программный блок передаточной функции системы по сигналу угловой скорости тангажа, блок невязки по угловой скорости тангажа, блок формирования сигнала управления. Обеспечивается повышение безопасности полета путем улучшения характеристик управления ЛА с помощью построения алгоритма синтеза управления ЛА в продольной плоскости. 2 ил.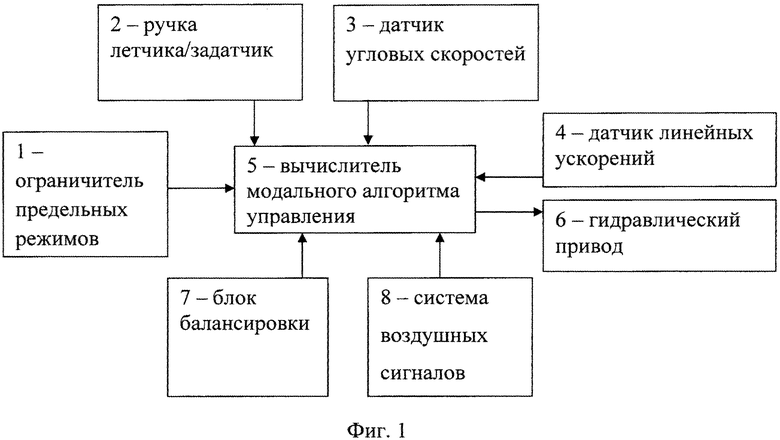
Система автоматизированного модального управления в продольном канале летательного аппарата, содержащая последовательно соединенные ручку пилота/задатчик тангажа и вычислитель автопилота угла тангажа, гидравлический привод и селектор минимального сигнала в составе сервопривода, выходной сигнал которого определяет угол отклонения руля высоты летательного аппарата, датчик угла тангажа летательного аппарата, имеющий выход, подключенный ко второму входу вычислителя автопилота угла тангажа, ограничитель предельных режимов (ОПР), состоящий из последовательно соединенных задатчика максимального угла атаки, вычислителя автомата ограничения угла атаки, выход которого подключен к входу сервопривода, датчик угловой скорости тангажа (ДУС) летательного аппарата, имеющий выход, подключенный к входу вычислителя автомата ограничения угла атаки, выход вычислителя автопилота угла тангажа подключен ко второму входу селектора минимального сигнала, а также блок балансировки, отличающаяся тем, что дополнительно введен вычислитель алгоритма модального управления (ВАМУ), содержащий блок формирования сигнала усредненного приведенного коэффициента подъемной силы  , программный блок оптимальной по критерию Шомбера-Гертсена передаточной функции системы по сигналу угловой скорости тангажа, блок невязки по угловой скорости тангажа (Δωz), на первый вход которого поступает сигнал с выхода датчика угловой скорости тангажа (ωz), на второй вход - сигнал угловой скорости тангажа с выхода блока передаточной функции (ωzm), при этом сумма масштабированных астатического сигнала (Δωz/p) и сигнала невязки (Δωz) с выхода блока невязки поступает на вход сервопривода и на первый вход блока передаточной функции, второй вход которого соединен с выходом датчика ручки летчика/задатчика тангажа, кроме того, в ВАМУ входит блок формирования сигнала управления (u) по правилу:
, программный блок оптимальной по критерию Шомбера-Гертсена передаточной функции системы по сигналу угловой скорости тангажа, блок невязки по угловой скорости тангажа (Δωz), на первый вход которого поступает сигнал с выхода датчика угловой скорости тангажа (ωz), на второй вход - сигнал угловой скорости тангажа с выхода блока передаточной функции (ωzm), при этом сумма масштабированных астатического сигнала (Δωz/p) и сигнала невязки (Δωz) с выхода блока невязки поступает на вход сервопривода и на первый вход блока передаточной функции, второй вход которого соединен с выходом датчика ручки летчика/задатчика тангажа, кроме того, в ВАМУ входит блок формирования сигнала управления (u) по правилу:

где: Fl - сигнал с ручки пилота,
ki - масштабные коэффициенты закона управления,
ωz - выходной сигнал датчика угловая скорость тангажа ЛА,
ωzm - выходной сигнал с желаемой эталонной модели,
ny - нормальная перегрузка.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ ТАНГАЖА И ОГРАНИЧЕНИЯ УГЛА АТАКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2434785C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2364548C2 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЁТОМ | 2011 |
|
RU2482022C1 |
| US 7693624 B2, 06.04.2010 | |||
| US 6915989 B2, 12.07.2005. | |||

