Изобретение относится к области систем автоматического управления (САУ) углом тангажа летательного аппарата (ЛА).
Известны САУ, обеспечивающие отработку заданного угла тангажа ЛА с помощью автопилота, воздействующего на угол отклонения руля высоты ЛА [1. Боднер В.А. Системы управления летательными аппаратами. - М.: Машиностроение, 1973. - 506 с. Стр.101, рис.3.9; 2. Красовский А.А. Системы автоматического управления полетом и их аналитическое конструирование. - М.: Наука, 1973. - 560 с. Стр.179, рис.5.2; 3. Михалев И.А., Окоемов Б.Н., Чикулаев М.С. Системы автоматического управления самолетом. - М.: Машиностроение, 1987. - с.240. Стр.192, рис.14.2, стр.194, рис.14.4, стр.198, рис.14.7, стр.201, рис.14.9].
Наиболее близкой по достигаемому техническому результату, выбранной в качестве прототипа, принимается САУ углом тангажа ЛА, реализующая астатический закон управления со скоростной обратной связью, содержащая последовательно соединенные задатчик угла тангажа и вычислитель автопилота угла тангажа, сервопривод, выходной сигнал которого определяет угол отклонения руля высоты летательного аппарата, датчик угла тангажа летательного аппарата, имеющий выход, подключенный к второму входу вычислителя автопилота угла тангажа [Боднер В.А. Системы управления летательными аппаратами. - М. Машиностроение, 1973. - 506 с. Стр.101, рис.3.9].
Эта САУ обеспечивает хорошие статические и динамические характеристики канала управления углом тангажа ЛА, но не позволяет ограничить значение угла атаки, что может привести к недопустимым аэродинамическим характеристикам ЛА и нарушению безопасности полета при маневрировании на больших углах атаки.
Как известно, одним из наиболее важных ограничений при полете ЛА является ограничение угла атаки. Диапазон эксплуатационных углов атаки заключен между предельными допустимыми углами атаки (αдоп.min и αдоп.max [Михалев И.А., Окоемов Б.Н., Чикулаев М.С. Системы автоматического управления самолетом. - М.: Машиностроение, 1987. - с.240. Стр.42, рис.4.1].
Задачей, на решение которой направлено заявляемое изобретение, является обеспечение необходимой точности ограничения угла атаки за счет включения в САУ углом тангажа ЛА автомата ограничения с помощью алгебраического селектора максимального сигнала.
Поставленная задача достигается тем, что в систему автоматического управления углом тангажа и ограничения угла атаки летательного аппарата, содержащую последовательно соединенные задатчик угла тангажа и вычислитель автопилота угла тангажа, сервопривод, выходной сигнал которого определяет угол отклонения руля высоты летательного аппарата, датчик угла тангажа летательного аппарата, имеющий выход, подключенный к второму входу вычислителя автопилота угла тангажа, в отличие от прототипа дополнительно введены последовательно соединенные задатчик максимального угла атаки, вычислитель автомата ограничения угла атаки и селектор минимального сигнала, выход которого подключен к входу сервопривода, датчик угловой скорости крена летательного аппарата, имеющий выход, подключенный к второму входу вычислителя автомата ограничения угла атаки, выход вычислителя автопилота угла тангажа подключен к второму входу селектора минимального сигнала.
Существо изобретения поясняется чертежами.
На фиг.1 представлена структурная схема заявляемой системы автоматического управления углом тангажа и ограничения угла атаки летательного аппарата.
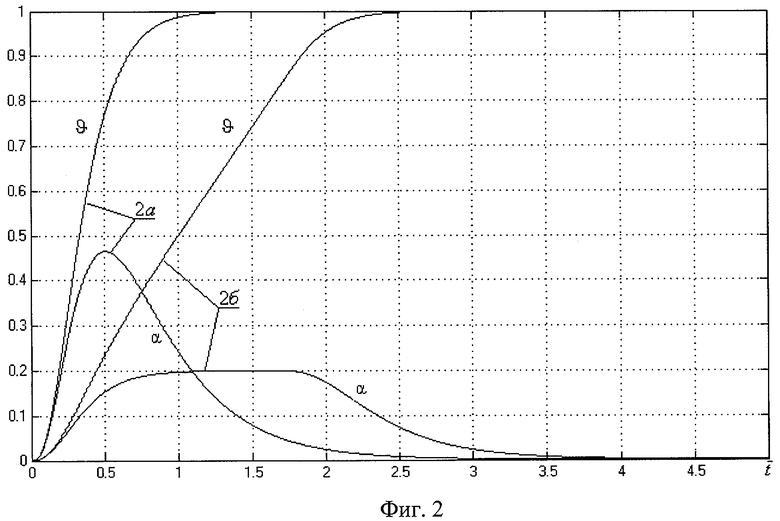
На фиг.2 представлены результаты моделирования переходных процессов: 2а - графики переходных процессов в САУ углом тангажа ϑ без автомата ограничения угла атаки α, 2б - графики переходных процессов в САУ углом тангажа ϑ с автоматом ограничения угла атаки α.
Система автоматического управления углом тангажа и ограничения угла атаки летательного аппарата, содержащая последовательно соединенные задатчик угла тангажа 1 и вычислитель автопилота угла тангажа 2, сервопривод 3, выходной сигнал которого определяет угол отклонения руля высоты летательного аппарата 4, датчик угла тангажа 5 летательного аппарата 4, имеющий выход, подключенный к второму входу вычислителя автопилота угла тангажа 2, согласно изобретению содержит последовательно соединенные задатчик максимального угла атаки 6, вычислитель автомата ограничения угла атаки 7 и алгебраический селектор максимального сигнала 8, выход которого подключен к входу сервопривода 3, датчик угловой скорости крена 9 летательного аппарата 4, имеющий выход, подключенный к второму входу вычислителя автомата ограничения угла атаки 7, выход вычислителя автопилота угла тангажа 2 подключен к второму входу алгебраического селектора максимального сигнала 8.
Ограничение угла атаки в приведенной системе достигается за счет введения в ее структуру автомата ограничения угла атаки и алгебраического селектора максимального сигнала.
Система автоматического управления углом тангажа с вычислителем автомата ограничения угла атаки работает следующим образом.
Сигнал заданного угла тангажа ϑзад с выхода задатчика угла тангажа 1 поступает на первый вход вычислителя автопилота угла тангажа 2, на второй вход которого поступает сигнал текущего значения угла тангажа ϑ с выхода датчика угла тангажа 5. На выходе вычислителя автопилота угла крена 2 формируется сигнал

поступающий на один из входов алгебраического селектора максимального сигнала 8.
Сигнал заданного максимального угла атаки αогр с выхода задатчика максимального угла атаки 6 поступает на первый вход вычислителя автомата ограничения угла атаки 7, на второй вход которого поступает сигнал текущего значения угла атаки α с выхода датчика угла атаки 9. На выходе вычислителя автомата ограничения угла атаки 7 формируется сигнал
 ,
,
поступающий на другой из двух входов алгебраического селектора максимального сигнала 8.
Для построения САУ с ограничением параметров ЛА можно использовать логические устройства, реализующие алгоритмы алгебраического селектирования каналов. Обычно применяется принцип селектирования, согласно которому регулируется параметр многомерного объекта управления, наиболее приблизившийся к величине, определяемой программой управления [Интегральные системы автоматического управления силовыми установками самолетов. / Под ред. А.А.Шевякова. - М.: Машиностроение, 1983. - 283 с. Стр.110-111]. Такое селектирование реализуется с помощью алгебраических селекторов.
Для того чтобы регулируемые параметры не превысили максимально допустимых значений (ограничение сверху), селектор должен пропустить на управление сигнал, соответствующий получению минимальной величины управляющего сигнала. Такое селектирование называют селектированием по минимуму, а селектор - селектором минимальных сигналов управления.
Если же ограничивают минимальные значения параметров (ограничение снизу), то предпочтение отдается регулятору параметра, для поддержания которого требуется наибольший управляющий сигнал, т.е. осуществляется селектирование по максимуму. В этом случае используют селектор максимальных сигналов управления.
Такая классификация алгебраических селекторов справедлива, если коэффициент передачи объекта управления больше нуля. Если коэффициент передачи объекта управления меньше нуля, логика алгебраического селектора должна быть противоположной. Как известно, в уравнения и передаточные функции ЛА по углу тангажа и углу атаки входит знак минус при изменении угла отклонения руля высоты δв [1. Боднер В.А. Системы управления летательными аппаратами. - М. Машиностроение, 1973. - 506 с. Стр.28; 2. Красовский А.А. Системы автоматического управления полетом и их аналитическое конструирование. - М.: Наука, 1973 г. - 560 с. Стр.37]. Поэтому в рассматриваемой системе должен использоваться алгебраический селектор максимального сигнала 9.
Относительно разности входных сигналов ε=U1-U2 выражение, описывающее работу алгебраического селектора двух величин, преобразуется с использованием операции выделения модуля следующим образом:

где µ=1 для селектора максимального сигнала; µ=-1 для селектора минимального сигнала.
Селекторы вводятся в САУ для плавного переключения каналов управления и обеспечивают во всех условиях работы управляющее воздействие только одного из нескольких каналов управления, включаемых в работу в зависимости от режима работы объекта управления. При этом каждый из каналов управления работает автономно и его параметры обычно выбираются без учета взаимодействия с другими каналами. Это позволяет сохранить статическую точность и запасы устойчивости, свойственные отдельным каналам управления.
Следовательно, алгебраический селектор обеспечивает плавное переключение с одного канала на другой, например с автопилота на автомат ограничения и обратно на автопилот.
Выходной сигнал U алгебраического селектора максимального сигнала 8 поступает на вход астатического сервопривода 3 с передаточной функцией
 ,
,
изменяющего угол отклонения руля высоты δв летательного аппарата 4:
 .
.
Приведем синтез системы автоматического управления углом тангажа и ограничения угла атаки летательного аппарата.
Аналитический синтез передаточных чисел автопилота и автомата ограничения с учетом заданного качества САУ удобно производить с помощью метода стандартных переходных характеристик [Петунин В.И. Синтез законов управления канала тангажа автопилота. // Вестник УГАТУ, серия «Управление, вычислительная техника и информатика». 2007. Том 9, №2 (20). С.25-31]. При этом должно выполняться равенство передаточных функций исходной Ф(р) и желаемой систем Ф*(р):
 .
.
Передаточная функция самолета по углу тангажа ϑ при управлении рулем высоты δв [Боднер В.А. Системы управления летательными аппаратами. - М.: Машиностроение, 1973. - 506 с. Стр.28]:
 .
.
Закон управления астатического автопилота угла тангажа со скоростной обратной связью:

где kϑ,  ,
,  ,
,  - передаточные числа автопилота.
- передаточные числа автопилота.
Синтез астатического автопилота угла тангажа со скоростной обратной связью подробно рассмотрен в работе [Петунин В.И. Синтез законов управления канала тангажа автопилота. // Вестник УГАТУ, серия «Управление, вычислительная техника и информатика». 2007. Том 9, №2 (20). С.25-31].
Передаточная функция самолета по углу атаки α при управлении рулем высоты δв [Боднер В.А. Системы управления летательными аппаратами. - М.: Машиностроение, 1973. - 506 с. Стр.28]:
 .
.
Закон управления автомата ограничения угла атаки:
 ,
,
где kα; k ; k
; k - передаточные числа автомата ограничения.
- передаточные числа автомата ограничения.
Передаточная функция замкнутой системы по углу атаки:

Желаемая передаточная функция замкнутой системы по углу атаки:
 .
.
Тогда передаточные числа автомата ограничения:

 .
.
Результаты синтеза подтверждаются результатами моделирования переходных процессов в заявляемой системе автоматического управления углом тангажа и ограничения угла атаки летательного аппарата, представленными на фиг.2, где задающие воздействия каналов: ϑзад=1; αогр=0,2. Переходные процессы 2а, полученные в САУ углом крена без автомата ограничения угловой скорости тангажа, являются не удовлетворительными, так как имеют заброс по углу атаки. Переходные процессы 2б, полученные в САУ углом тангажа с автоматом ограничения угла атаки, являются удовлетворительными, поскольку показывают необходимую точность ограничения α≤αогр=0,2 и хорошее качество управления на режимах переключения каналов системы.
Итак, заявляемое изобретение позволяет, благодаря введению в структуру САУ углом тангажа ЛА автомата ограничения угла атаки с помощью алгебраического селектора максимального сигнала, обеспечить необходимую точность ограничения угла атаки и плавные переходные процессы при переключении каналов.
Изобретение относится к области систем автоматического управления (САУ) углом тангажа летательного аппарата (ЛА). Система автоматического управления углом тангажа и ограничения угла атаки ЛА содержит последовательно соединенные задатчик угла тангажа и вычислитель автопилота угла тангажа, сервопривод, выходной сигнал которого определяет угол отклонения руля высоты ЛА, датчик угла тангажа ЛА, последовательно соединенные задатчик максимального угла атаки, вычислитель автомата ограничения угла атаки и алгебраический селектор максимального сигнала, датчик угловой скорости ЛА. Выход датчика угла тангажа ЛА подключен к второму входу вычислителя автопилота угла тангажа. Выход алгебраического селектора максимального сигнала подключен к входу сервопривода. Выход датчика угловой скорости крена летательного аппарата подключен к второму входу вычислителя автомата ограничения угла атаки. Выход вычислителя автопилота угла тангажа подключен к второму входу алгебраического селектора максимального сигнала. Достигается обеспечение необходимой точности ограничения угла атаки и обеспечение плавных переходных процессов в САУ углом тангажа. 2 ил.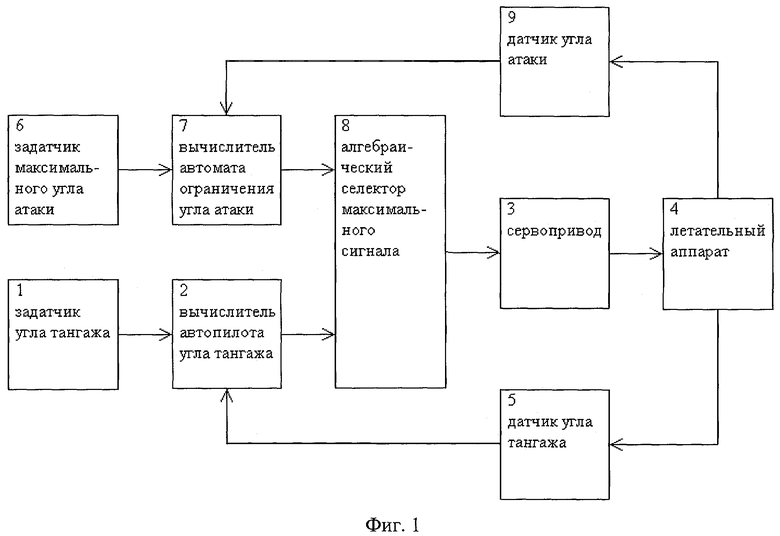
Система автоматического управления углом тангажа и ограничения угла атаки летательного аппарата, содержащая последовательно соединенные задатчик угла тангажа и вычислитель автопилота угла тангажа, сервопривод, выходной сигнал которого определяет угол отклонения руля высоты летательного аппарата, датчик угла тангажа летательного аппарата, имеющий выход, подключенный к второму входу вычислителя автопилота угла тангажа, отличающаяся тем, что дополнительно содержит последовательно соединенные задатчик максимального угла атаки, вычислитель автомата ограничения угла атаки и алгебраический селектор максимального сигнала, выход которого подключен к входу сервопривода, датчик угловой скорости крена летательного аппарата, имеющий выход, подключенный к второму входу вычислителя автомата ограничения угла атаки, выход вычислителя автопилота угла тангажа подключен к второму входу алгебраического селектора максимального сигнала.
| Боднер В.А | |||
| Системы управления летательными аппаратами | |||
| - М.: Машиностроение, 1973, с.101 | |||
| Михалев И.А., Окоемов Б.Н., Чикулаев М.С | |||
| Системы автоматического управления самолетом | |||
| - М.: Машиностроение, 1987, с.42 | |||
| Система управления углом наклона траектории самолета в продольной плоскости в режиме взлета | 1990 |
|
SU1779638A1 |
| RU 2008116301 A, 10.11.2009 | |||
| СИСТЕМА ОТОБРАЖЕНИЯ ПИЛОТАЖНОЙ ИНФОРМАЦИИ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2046059C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2290346C1 |
| US 5036469 A, 30.07.1991 | |||
| Судовой трап | 1988 |
|
SU1527088A2 |

