Изобретение относится к области гидроакустики и предназначено для распознавания морских судов разного водоизмещения по их шумоизлучению.
Известно [Бородай И.К. и др. Прикладные задачи динамики судов на волнении // Судостроение. - 1989. - Т. 258. - С. 539-543, Бородай И.К., Нецветаев Ю.А. Мореходность судов // Л.: Судостроение. - 1982. - Т. 288], что процесс качки корабля при динамическом воздействии на него ветрового волнения, в общем случае является случайным процессом со спектром, описываемым кривой Релея с выраженным максимумом. Этот максимум соответствует основному периоду качки корабля, который обусловлен его водоизмещением.
В части гидроакустики качка надводных кораблей приводит к образованию низкочастотных флуктуаций шумового сигнала, принимаемого гидроакустическими средствами [Кудрявцев А.А., Лугинец К.П., Машошин А.И. Об амплитудной модуляции подводного шумоизлучения гражданских судов // Акустический журнал. - 2003. - Т. 49. - №2. - С. 224-228]. Характер этих флуктуаций в простых моделях считается квазигармоническим, подобным спектру качки. Поэтому среднее значение периода флуктуаций сигнала шумоизлучения будет различно для кораблей разного водоизмещения в одинаковых условиях. На этом явлении основаны способы определения водоизмещения надводных кораблей при их шумопеленговании.
Известны способ и устройство для его реализации [Машошин А.И. Оптимизация устройства обнаружения и измерения параметров амплитудной модуляции подводного шумоизлучения морских судов // Акустический журнал. - 2013. - Т. 59. - №3. - С. 347-353]. В способе осуществляется обработка шумового сигнала корабля с целью обнаружения и анализа спектра его низкочастотных флуктуаций, на основании чего определяется водоизмещение корабля. При обработке шумового сигнала согласно этому способу используют полную полосу частот премного тракта, что является недостатком. Натурные исследования [Консон А.Д., Волкова А.А. Спектральные свойства флуктуаций подводного шумоизлучения морских судов // Прикладные технологии гидроакустики и гидрофизики. - 2018. - С. 427-429] показали, что низкочастотные флуктуации, на основании анализа которых определяется водоизмещение корабля, присутствуют не во всей полосе частот приемного тракта, а могут проявляться только в некоторой ограниченной области частот. При этом выделение флуктуаций с использованием всей полосы частот приводит к ослаблению эффекта флуктуации сигнала, и в пределе к невозможности определить период флуктуаций и, следовательно, водоизмещение корабля.
Известны способ и устройство для его реализации [Волкова А.А., Консон А.Д. Патент РФ №2694270 от 11.07.2019. Устройство определения водоизмещения надводного корабля при его шумопеленговании. МПК G01S 3/80]. В указанном способе реализована обработка сигнала в шумопеленговании, при которой выделение низкочастотных флуктуаций осуществляется для совокупности полос частот, для каждой из которых повторяются однотипные процедуры анализа спектра флуктуаций. Водоизмещение надводного корабля определяется на заключительном этапе анализа в случае, если хотя бы для одной из полос частот удалось определить период флуктуаций. Способ частично устраняет недостаток способа [Машошин А.И. Оптимизация устройства обнаружения и измерения параметров амплитудной модуляции подводного шумоизлучения морских судов // Акустический журнал. - 2013. - Т. 59. - №3. - С. 347-353], однако, при этом значительно увеличивается количество выполняемых арифметических операций, что приводит к увеличению требований к вычислительным ресурсам.
Наиболее близким аналогом по выполняемым процедурам к предлагаемому изобретению является способ [Консон А.Д., Волкова А.А. Патент РФ №2645013 от 15.02.2018. Способ определения водоизмещения надводного корабля при его шумопеленговании. МПК G01S 3/80], который можно принять за прототип.
Способ-прототип содержит следующие операции:
прием шумового сигнала надводного корабля гидроакустической антенной с фиксированных направлений по горизонтали и вертикали в диапазоне частот приемного тракта,
аналого-цифровое преобразование сигнала,
детектирование,
низкочастотную фильтрацию,
вычисление спектра флуктуаций, обусловленных качкой,
анализ спектра флуктуаций,
определение водоизмещения надводного корабля.
Недостаток этого способа аналогичен недостатку способа [Машошин А.И. Оптимизация устройства обнаружения и измерения параметров амплитудной модуляции подводного шумоизлучения морских судов // Акустический журнал. - 2013. - Т. 59. - №3. - С. 347-353], и заключается в том, что обработка при шумопеленговании в полной полосе частот премного тракта не является оптимальной для дальнейшего выделения низкочастотных флуктуаций сигнала, и может приводить к невозможности определения водоизмещения надводного корабля.
Задачей заявляемого способа является создание оптимальной для определения водоизмещения надводных кораблей обработки сигнала в шумопеленговании.
Для решения поставленной задачи в способ шумопеленгования с определением водоизмещения надводного корабля, который содержит прием шумового сигнала надводного корабля гидроакустической антенной с горизонтального направления α и вертикального направления β в диапазоне частот от fmin до fmax, аналого-цифровое преобразование сигнала, детектирование, низкочастотную фильтрацию, вычисление спектра флуктуаций, обусловленных качкой, анализ спектра флуктуаций, определение водоизмещения надводного корабля,
введены новые признаки, а именно:
измеряют волнение моря σ в метрах,
измеряют скорость звука C в месте установки антенны,
определяют совокупность коэффициентов K(f)=4πfσsinβ/C для набора частот f в диапазоне от fmin до fmax, при фиксированных параметрах σ, β, С, где σ - измеренное волнение моря, β - угол приема сигнала в вертикальной плоскости, С - измеренная скорость звука, π - число пи,
выбирают одну частоту fopt из набора, для которой коэффициент K(f) принимает наибольшее значение из тех, которые не более единицы fopt=argmax{K(f)≤1},
а полосовую фильтрацию сигнала со средней частотой полосы пропускания, равной выбранной частоте fopt ,осуществляют перед детектированием.
Техническим результатом изобретения является обеспечение полосовой фильтрации в шумопеленговании со среднегеометрической частотой, оптимальной для дальнейшего определения водоизмещения надводного корабля в текущих условиях гидроакустического наблюдения.
Покажем возможность достижения указанного технического результата предложенным способом.
В работе [Консон А.Д., Волкова А.А. Модуляция шумового сигнала при качке корабля вследствие флуктуирующей интерференции лучей // Фундаментальная и прикладная гидрофизика. - 2023. Т. 15. - №4. - С. 74-81] проведен большой комплекс аналитических, имитационных и экспериментальных исследований явления образования низкочастотных флуктуаций шумового сигнала при качке надводного корабля. Исследования показали, что явление флуктуации сигнала при качке корабля может быть объяснено образованием флуктуирующей интерференции лучей, распространяющихся от вертикально качающегося источника. При этом спектрально-энергетические характеристики флуктуации сигнала зависят от совокупных условий, которые характеризуются значением коэффициента K. Коэффициент K согласно указанной работе записывается как K=2kσsinβ, где  - волновое число, f - частота сигнала, С - скорость звука, σ - волнение моря в метрах, β - угол приема сигнала в вертикальной плоскости, π - число пи. В терминах, более удобных для настоящей заявки, выражение для K можно переписать, как: K=4πfσsinβ/C. В работе показано, что значение коэффициента K разделяет физический процесс образования низкочастотных флуктуаций на два типа. При значениях K≤1 результаты наблюдения за процессом флуктуаций сигнала можно отождествлять с процессом качки корабля. В этом случае период флуктуаций соответствует периоду качки корабля, что делает возможным определение водоизмещения. При этом максимум мощности флуктуации достигается при K=1. При значениях K>1 спектр низкочастотных флуктуаций сигнала перестает соответствовать спектру процесса качки, что делает определение водоизмещения невозможным.
- волновое число, f - частота сигнала, С - скорость звука, σ - волнение моря в метрах, β - угол приема сигнала в вертикальной плоскости, π - число пи. В терминах, более удобных для настоящей заявки, выражение для K можно переписать, как: K=4πfσsinβ/C. В работе показано, что значение коэффициента K разделяет физический процесс образования низкочастотных флуктуаций на два типа. При значениях K≤1 результаты наблюдения за процессом флуктуаций сигнала можно отождествлять с процессом качки корабля. В этом случае период флуктуаций соответствует периоду качки корабля, что делает возможным определение водоизмещения. При этом максимум мощности флуктуации достигается при K=1. При значениях K>1 спектр низкочастотных флуктуаций сигнала перестает соответствовать спектру процесса качки, что делает определение водоизмещения невозможным.
Указанное новое знание, полученное в работе [Консон А.Д., Волкова А.А. Модуляция шумового сигнала при качке корабля вследствие флуктуирующей интерференции лучей // Фундаментальная и прикладная гидрофизика. - 2023. Т. 15. - №4. - С. 74-81], позволяет создать способ шумопеленгования, который будет адаптивно подстраиваться под текущие условия гидроакустического наблюдения для определения водоизмещения наилучшим образом. Для этого необходимо, чтобы совокупность значений параметров, входящих в выражение для коэффициента K, позволяла обеспечить значение коэффициента K оптимальным для последующего определения водоизмещения, то есть близким к единице, но не превышающим ее. В выражение K входят параметры: частота сигнала, волнение моря, угол приема сигнала и скорость звука. Параметр угол приема сигнала измеряется в процедуре ограничительной части формулы изобретения. Параметры волнение моря и скорость звука представляют собой текущие условия гидроакустического наблюдения, и могут быть измерены, для чего в способ введены соответствующие процедуры. Таким образом, параметры угол приема, волнение моря и скорость звука становятся фиксированными числами, которые нельзя изменить. Тогда для обеспечения оптимальности коэффициента K необходимо подобрать, а затем использовать при шумопеленговании последний параметр, входящий в выражение для K, а именно частоту сигнала. Для этого в способ введены процедура определения совокупности коэффициентов K для различных частот сигнала и процедура выбора одной частоты fopt, при которой коэффициент K становится оптимальным. Выбранная частота является частотой сигнала, оптимальной для дальнейшего определения водоизмещения надводного корабля в текущих условиях гидроакустического наблюдения. В связи с тем, что в шумопеленговании обработка ведется не для тонального, а для шумового сигнала, в способ введена процедура полосовой фильтрации со средней частотой полосы пропускания, равной выбранной частоте fopt. Таким образом, способ шумопеленгования подстраивается под оптимальное определение водоизмещения надводного корабля.
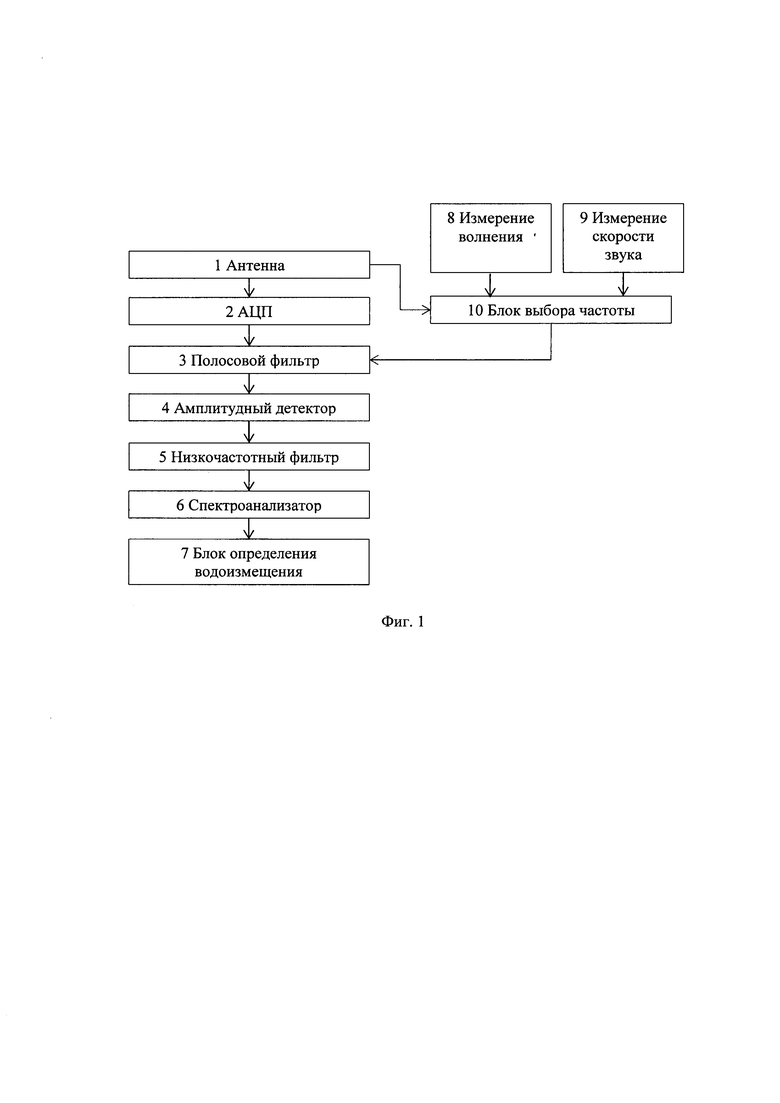
Сущность изобретения поясняется фиг. 1, на которой приведена блок-схема устройства, реализующего предлагаемый способ.
Способ технически реализуется аппаратно-программными средствами по структурной схеме, приведенной на фиг. 1. Для реализации способа последовательно соединены: антенна 1, блок 2 аналого-цифрового преобразования (АЦП), полосовой фильтр 3, амплитудный детектор 4, низкочастотный фильтр 5, спектроанализатор 6, блок 7 определения водоизмещения. Кроме того, схема содержит блок 8 измерения волнения, блок 9 измерения скорости звука и блок 10 выбора частоты. Выходы блоков 8 и 9 подключены к первому и второму входам блока 10. К третьему входу блока 10 подключен второй выход блока 1, а выход блока 10 подключен ко второму входу блока 3.
В динамике работы предлагаемый способ реализуется следующим образом. Предварительно в блоке 8 осуществляют измерение волнения моря, а в блоке 9 - измерение скорости звука в месте установки антенны. Измерение волнения σ может быть осуществлено с помощью технических средств, например погодных буев. Волнение измеряется либо в метрах, что требуется для реализации способа, либо в баллах. Перевод из баллов в метры осуществляется по девятибалльной шкале волнения [Справочник вахтенного офицера / Под ред. канд. военно-морских наук контр-адмирала А.П. Проничкина. М: Воениздат МО СССР, 1975]. Для измерения скорости звука С может быть использован один из приборов, описанных в [Комляков В.А. Корабельные средства измерения скорости звука и моделирования акустических полей в океане. СПб.: Наука. - 2003. - 357 с]. Измеренные значения величины волнения σ и скорости звука С поступают в блок 10 для использования в дальнейшей работе. При изменении волнения или места установки антенны осуществляют новое измерение волнения или скорости звука, и в блоке 10 уточненные значения заменяют предыдущие.
Шумовой сигнал объекта, принятый антенной 1, поступает в блок 2, где осуществляется его аналого-цифровое преобразование [Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов. - Рипол Классик, 1978]. Угол прихода сигнала в горизонтальной α и вертикальной β плоскостях определяется либо механическим поворотом антенны в пространстве, либо электрическим способом компенсации характеристики направленности [Колчеданцев А.С. Гидроакустические станции // Л.: Судостроение. - 1982. - Т. 237]. В любом случае, угол прихода сигнала в вертикальной плоскости β поступает в блок 10 выбора частоты. А сигнал в оцифрованном виде из блока 2 поступает в полосовой фильтр 3.
В блоке 10 осуществляется расчет совокупности коэффициентов K(f)=4πfσsinβ/C для набора частот f в диапазоне от минимально возможного до максимально возможного значений, определяемых параметрами антенны. Известно [Бальян Р.Х., Батаногов Э.В., Богородский А.В. Терминологический словарь - справочник по гидроакустике // Л.: Судостроение. - 1989, Смарышев М.Д. Направленность гидроакустических антенн // Л.: Судостроение. - 1973. - Т. 278], что минимальная частота принимаемого сигнала определяется размером апертуры всей антенны, а максимальная частота - расстоянием между отдельными приемными элементами. Количество частот в наборе определяется опытным путем с учетом диапазона частот и вычислительных ресурсов. При расчете совокупности коэффициентов K(f), кроме математической константы π=3.14, используются:
- величина волнения σ, измеренная в блоке 8;
- скорость звука С, измеренная в блоке 9;
- угол прихода сигнала в вертикальной плоскости β из блока 1.
Далее в блоке 10 выбирают одну частоту fopt из набора, для которой коэффициент K(f) принимает наибольшее значение из тех, которые не более единицы fopt=argmax{K(f)≤1}. Выбранное значение частоты поступает в полосовой фильтр 3.
В таблице приведен пример значений коэффициента K(f) для набора частот f при фиксированных значениях σ=1 м, β=3°, С=1500 м/с.
В данном случае в качестве fopt будет выбрана частота 2000 Гц, поскольку именно для этой частоты коэффициент K принимает максимальное значение, но не превышающее единицу.
Полосовой фильтр 3 настраивает полосу своего пропускания на основании значения средней частоты fopt, поступившей из блока 10. Ширина полосы может быть выбрана равной одной октаве, когда конечная частота полосы превышает начальную в два раза, что обеспечивает хорошие показатели по помехоустойчивости [Волкова А.А., Консон А.Д., Никулин М.Н. Оценка расстояния до источника шумового сигнала методом «оптимальных частот» с использованием полосовых фильтров // Гидроакустика. - 2015. - №22. - С. 43-52]. Тогда начальная частота полосы пропускания определится как  , а конечная частота - как
, а конечная частота - как  . После настройки полосы пропускания в блоке 3 осуществляется полосовая фильтрация сигнала, поступившего из блока 2.
. После настройки полосы пропускания в блоке 3 осуществляется полосовая фильтрация сигнала, поступившего из блока 2.
После полосовой фильтрации сигнал последовательно поступает в амплитудный детектор 4, низкочастотный фильтр 5 и спектроанализатор 6. В качестве детектора для выделения низкочастотных флуктуаций сигнала может выступать как квадратичный, так и линейный детектор [Харкевич А.А. Спектры и анализ. - 1962]. При низкочастотной фильтрации должна быть достигнута полоса анализа, в которой наблюдаются низкочастотные флуктуации сигнала, обусловленные качкой при волнении поверхности моря. Параметры такой полосы известны из [Машошин А.И. Оптимизация устройства обнаружения и измерения параметров амплитудной модуляции подводного шумоизлучения морских судов // Акустический журнал. - 2013. - Т. 59. - №3. - С. 347-353]. В спектроанализаторе для оптимизации расчета используется процедура быстрого преобразования Фурье, с числом отсчетов, равным ближайшей степени двойки [Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов. - Рипол Классик, 1978]. Полученный спектр низкочастотных флуктуаций сигнала поступает из блока 6 в блок 7 для определения водоизмещения.
В блоке 7 осуществляется анализ полученного спектра согласно способу-прототипу, в результате чего определяются частота низкочастотной флуктуации сигнала и ее период. Далее по табличной зависимости водоизмещения от периода низкочастотной флуктуации сигнала определяют водоизмещение надводного корабля. Методика определения зависимости между водоизмещением надводного корабля и периодом его качки известна, например, из [Сизов В.Г. Теория корабля // Одесса: Феникс.- 2003.- Т. 5] (раздел 7.2.2 и, в частности, таблица 7.2 - Периоды качки судов различных типов). Период качки в свою очередь является величиной, обратной частоте флуктуаций сигнала [Бальян Р.Х., Батаногов Э.В., Богородский А.В. Терминологический словарь - справочник по гидроакустике // Л.: Судостроение. - 1989].
Все изложенное позволяет считать задачу изобретения решенной. Предложен способ шумопеленгования, который оперативно подстраивает частотную полосу фильтрации сигнала таким образом, чтобы дальнейшая обработка позволяла наилучшим образом определять водоизмещение надводного корабля в текущих условиях гидроакустического наблюдения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство определения водоизмещения надводного корабля при его шумопеленговании | 2018 |
|
RU2694270C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВОДОИЗМЕЩЕНИЯ НАДВОДНОГО КОРАБЛЯ ПРИ ЕГО ШУМОПЕЛЕНГОВАНИИ | 2016 |
|
RU2645013C1 |
| Способ панорамной классификации шумящих объектов | 2017 |
|
RU2684439C1 |
| Способ пассивного определения пространственного положения обнаруженного шумящего в море подводного объекта позиционным стационарным гидроакустическим комплексом | 2023 |
|
RU2810698C1 |
| Способ классификации морских объектов по уровню шума в источнике | 2021 |
|
RU2767001C1 |
| Способ классификации шумоизлучения морского объекта | 2021 |
|
RU2776958C1 |
| Способ обработки кратковременного нестационарного случайного процесса шумоизлучения | 2023 |
|
RU2808947C1 |
| СПОСОБ ОЦЕНКИ ДИСТАНЦИИ ДО ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2013 |
|
RU2559310C2 |
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2015 |
|
RU2602732C1 |
| СПОСОБ СОВМЕСТНОЙ ОЦЕНКИ ДИСТАНЦИИ ДО ШУМЯЩЕГО В МОРЕ ОБЪЕКТА И ЕГО ШУМНОСТИ | 2014 |
|
RU2548400C1 |
Использование: изобретение относится к области гидроакустики и предназначено для распознавания морских судов разного водоизмещения по их шумоизлучению. Сущность: способ состоит из типовых процедур шумопеленгования с выделением низкочастотных флуктуаций сигнала для анализа качки корабля. При реализации способа измеряют волнение моря и скорость звука, и осуществляют полосовую фильтрацию сигнала с адаптивным выбором полосы частот, зависимым от измеренных параметров. Технический результат: обеспечение полосовой фильтрации в шумопеленговании со среднегеометрической частотой, оптимальной для дальнейшего определения водоизмещения надводного корабля в текущих условиях гидроакустического наблюдения. 1 ил.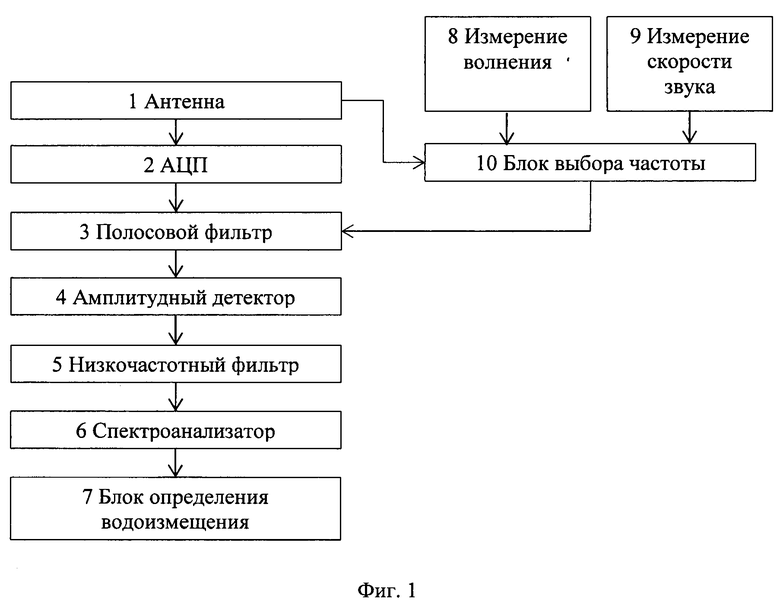
Способ шумопеленгования с определением водоизмещения надводного корабля, содержащий прием шумового сигнала надводного корабля гидроакустической антенной с горизонтального направления α и вертикального направления β в диапазоне частот от fmin до fmax, аналого-цифровое преобразование сигнала, детектирование, низкочастотную фильтрацию, вычисление спектра флуктуаций, обусловленных качкой, анализ спектра флуктуаций, определение водоизмещения надводного корабля, отличающийся тем, что измеряют волнение моря σ в метрах, измеряют скорость звука С в месте установки антенны, определяют совокупность коэффициентов K(f)=4πfσsinβ/C для набора частот f в диапазоне от fmin до fmax, при фиксированных параметрах σ, β, С, где σ - измеренное волнение моря, β - угол приема сигнала в вертикальной плоскости, С - измеренная скорость звука, π - число пи, выбирают одну частоту fopt из набора, для которой коэффициент K(f) принимает наибольшее значение из тех, которые не более единицы fopt=argmax{K(f)≤1}, а полосовую фильтрацию сигнала со средней частотой полосы пропускания, равной выбранной частоте fopt, осуществляют перед детектированием.
| Устройство определения водоизмещения надводного корабля при его шумопеленговании | 2018 |
|
RU2694270C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВОДОИЗМЕЩЕНИЯ НАДВОДНОГО КОРАБЛЯ ПРИ ЕГО ШУМОПЕЛЕНГОВАНИИ | 2016 |
|
RU2645013C1 |
| СПОСОБ КЛАССИФИКАЦИИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКОГО ОБЪЕКТА | 2013 |
|
RU2546851C1 |
| US 20200107289 A1, 02.04.2020 | |||
| 0 |
|
SU165526A1 | |
