Изобретение относится к области гидроакустики и предназначено для распознавания морских судов разного водоизмещения по их шумоизлучению.
Известно [1, 2], что качка корабля при динамическом воздействии на него ветрового волнения имеет две основные координатные составляющие: бортовую и килевую. В общем случае, процесс качки является случайным процессом со спектром, описываемым кривой Релея с выраженным максимумом. Этот максимум соответствует основному периоду качки корабля, который зависит от его водоизмещения [3].
Качка надводных кораблей приводит к образованию низкочастотных флуктуаций шумового сигнала, принимаемого гидроакустическими средствами [4]. Характер этих флуктуаций в простых моделях считается квазигармоническим, подобным спектру качки. Поэтому среднее значение периода флуктуаций сигнала шумоизлучения будет соответствовать основному периоду качки корабля, который, в свою очередь, обусловлен его водоизмещением. На этом явлении основаны способы и устройства определения водоизмещения надводных кораблей при их шумопеленговании.
Известен способ [5], в котором измеряют низкочастотные колебания сигнала шумоизлучения корабля и вычисляют период низкочастотных флуктуаций сигнала как промежуток времени между двумя соседними максимумами амплитуды. У этого способа можно выделить два недостатка. Во-первых, принятый гидроакустический шум содержит смесь полезного сигнала и помехи, что искажает вычисленный период флуктуаций сигнала. И во-вторых, как следствие первого недостатка, процедура определения периода не может быть автоматизирована.
Известен патент [6] на «Способ определения водоизмещения надводного корабля при его шумопеленговании», в котором описано устройство, позволяющее определять водоизмещение надводного корабля при заранее неизвестной ширине полосы частот низкочастотных флуктуаций его сигнала.
Наиболее близким аналогом по составу блоков и решаемым задачам к предлагаемому изобретению является устройство [7], которое принято за прототип.
Устройство-прототип содержит следующие последовательно соединенные блоки:
акустическую приемную антенну;
полосовой фильтр;
амплитудный детектор;
фильтр низкой частоты;
спектроанализатор;
вычислительное устройство.
Устройство осуществляет фильтрацию шумового сигнала в общей полосе частот приемного тракта, производит амплитудное детектирование и фильтрацию в низкой полосе частот, характерной для частот качки корабля с целью обнаружения низкочастотных флуктуаций шумового сигнала. Затем производится вычисление спектра низкочастотных флуктуаций и его анализ с целью определения периода флуктуаций. В вычислительном устройстве на основании периода флуктуаций определяется водоизмещение надводного корабля.
Устройства [6] и [7] имеют общий недостаток, связанный с малой изученностью процесса образования низкочастотных флуктуаций сигнала. Согласно работе [7], в которой проведен теоретический анализ отношения сигнал/помеха на выходе полосового фильтра, в качестве полосы частот шумового сигнала, в которой в дальнейшем производится обнаружение низкочастотных флуктуаций, следует использовать всю полосу частот премного тракта. Однако более поздние натурные исследования показали [8], что низкочастотные флуктуации не всегда присущи всей полосе частот принимаемого сигнала, а могут проявляться только в некоторой ограниченной области частот шумового сигнала. При этом выделение флуктуаций с использованием всей полосы частот приводит к ослаблению эффекта флуктуации сигнала, и в пределе к невозможности определить период флуктуаций и, следовательно, водоизмещение корабля.
Задачей заявляемого устройства является определение водоизмещения надводных кораблей при любой заранее неизвестной области частот шумового сигнала, в которой проявляются низкочастотные флуктуации, обусловленные качкой на волнении поверхности моря.
Для решения поставленной задачи в устройство определения водоизмещения надводного корабля при его шумопеленговании, содержащее между выходом акустической приемной антенны и входом вычислительного устройства первую ветку блоков в виде последовательно соединенных полосового фильтра, амплитудного детектора, фильтра низкой частоты и спектроанализатора, введены новые признаки, а именно между выходом акустической приемной антенны и входом вычислительного устройства параллельно первой ветке блоков подключены по крайней мере две новые ветки блоков, содержащие каждая последовательно соединенные полосовой фильтр, амплитудный детектор, фильтр низкой частоты и спектроанализатор, при этом полосовые фильтры всех параллельных веток блоков, включая первую, имеют различные диапазоны частот полосовой фильтрации, а вычислительное устройство содержит последовательно соединенные многоканальный блок выбора периода флуктуаций, вход которого является входом вычислительного устройства, и блок определения водоизмещения корабля.
Наилучший результат достигается, если нижняя частота полосового фильтра первой ветки равна начальной частоте приемного тракта, а верхняя частота полосового фильтра последней ветки равна конечной частоте приемного тракта.
Техническим результатом изобретения является повышение помехоустойчивости и обеспечение возможности определения водоизмещения надводного корабля при любой заранее неизвестной области частот шумового сигнала, в которой проявляются низкочастотные флуктуации, обусловленные качкой на волнении поверхности моря.
Покажем возможность достижения указанного технического результата.
Экспериментальные исследования, проведенные в работе [8] показали, что в разных гидролого-акустических условиях наблюдения низкочастотные флуктуации могут проявляться в разных ограниченных областях частот шумового сигнала, зависимость расположения которых на оси частот пока не выяснена. При этом использование для обнаружения флуктуаций всей полосы частот приемного тракта приводит к уменьшению мощности флуктуаций, регистрируемых на выходе спектроанализатора. И, наоборот, использование ограниченной области частот шумового сигнала, в которой именно проявляются флуктуации, приводит к увеличению их мощности на выходе спектроанализатора [8].
Заявленное устройство отличается от устройства-прототипа тем, что в нем присутствует не одна, а несколько однотипных параллельных веток обработки сигнала, начинающихся полосовым фильтром и заканчивающихся спектроанализатором. При этом параллельные ветки однотипных блоков различаются диапазоном частот полосовой фильтрации. Это позволит использовать для выделения низкочастотных флуктуаций не всю полосу частот приемного тракта, а совокупность ограниченных областей. Для той из веток обработки, для которой диапазон полосового фильтра окажется близким к ограниченной области частот шумового сигнала, в которой в данных условиях проявляются флуктуации, на выходе спектроанализатора будет зафиксирована максимальная из возможных мощность низкочастотных флуктуаций. При этом наличие нескольких параллельных веток обработки, различающихся диапазоном частот полосовой фильтрации, позволит одновременно проанализировать всю полосу частот приемного тракта на наличие низкочастотных флуктуаций в какой-либо, заранее неизвестной, из ее областей.
К вычислительному устройству заявленного устройства подсоединены все параллельные ветки обработки сигнала, а в само вычислительное устройство добавлен блок выбора периода флуктуаций по совокупности веток, что подразумевает выбор наилучшего результата. Это позволит производить анализ результата обработки сигнала по совокупности веток, выбирая результат, полученный при максимальной мощности низкочастотных флуктуаций. Таким образом, помехоустойчивость устройства будет повышена в любом случае, в какой бы области частот шумового сигнала не проявились низкочастотные флуктуации.
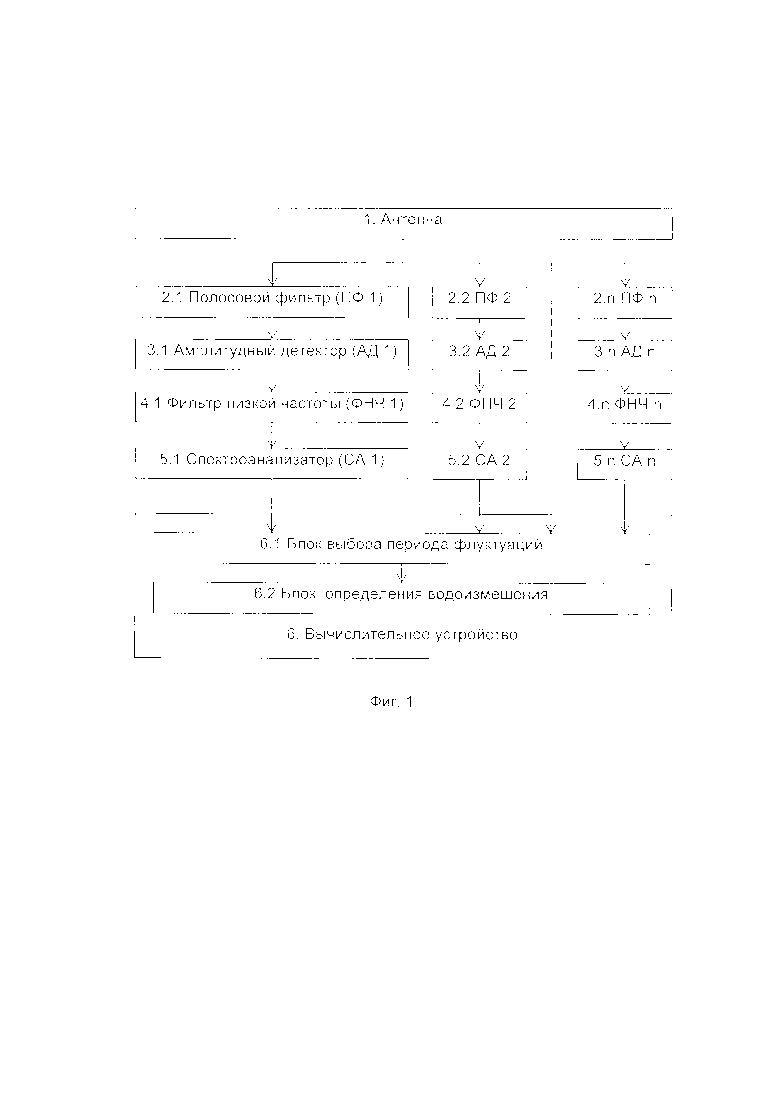
Сущность изобретения поясняется Фиг. 1, на которой приведена блок-схема устройства определения водоизмещения надводного корабля при его шумопеленговании.
Заявленное устройство (фиг. 1) содержит между антенной шумопеленгования 1 и вычислительным устройством 6 не менее трех параллельно соединенных веток, в каждой из которых последовательно соединены однотипные блоки: полосовой фильтр (блоки 2.1, 2.2, … 2.n), амплитудный детектор (блоки 3.1, 3.2, … 3.n), фильтр низкой частоты (блоки 4.1, 4.2, … 4.n), спектроанализатор (блоки 5.1, 5.2, … 5.n). Вычислительное устройство 6 содержит два последовательно соединенных блока: блок выбора периода флуктуаций 6.1 и блок определения водоизмещения корабля 6.1. При этом блок 6.1 обладает n входами, каждый из которых подсоединен к выходам спектроанализаторов 5.1, 5.2, … 5.n.
Антенна шумопеленгования известна из [9], при этом антенные модули могут быть выполнены согласно [10] со встроенными устройствами аналого-цифрового преобразования. Тогда задачи, решаемые в остальных блоках, могут быть реализованы в модулях программируемых процессоров сигналов и в модулях универсальной части цифрового вычислительного комплекса [11]. Количество параллельно соединенных веток однотипных блоков определяется полной шириной полосы частот приемного тракта шумопеленгования. Известно [12], что для обеспечения приемлемой помехоустойчивости в каждом отдельном канале обработки сигнала необходимо использовать ширину полосы частот не менее одной октавы. Тогда при стандартной полосе частот приемного тракта шумопеленгования 3-4 октавы необходимо в заявленном устройстве формировать 3-4 параллельные ветки однотипных блоков с различными диапазонами частот полосовой фильтрации. Относительная ширина полосы частот всех полосовых фильтров одинакова и равна одной октаве. Нижняя частота полосового фильтра первой ветки равна начальной частоте приемного тракта. Верхняя частота полосового фильтра последней ветки равна конечной частоте приемного тракта. Средние частоты полосовых фильтров всех веток распределены равномерно в диапазоне частот приемного тракта. При более широкой полосе частот приемного тракта количество веток однотипных блоков может быть увеличено без изменения результирующего эффекта устройства.
В динамике работы устройства шумовой сигнал корабля, принятый антенной 1 и переведенный в цифровой код, одновременно поступает во все n параллельные ветки обработки.
В блоках 2.1-2.n осуществляется полосовая фильтрация сигнала [13] фильтрами с шириной полосы одна октава. Наличие совокупности фильтров 2.1-2.n позволяет с одной стороны перекрыть всю полосу частот приемного тракта шумопеленгования, а с другой стороны производить дальнейшее выделение низкочастотных флуктуаций сигнала независимо в разных областях полной полосы. Далее отфильтрованные сигналы в каждой ветке независимо поступают каждый в свой амплитудный детектор 3.1-3.n. Все блоки 3.1-3.n абсолютно идентичны. В них может осуществляться либо квадратичное, либо линейное детектирование для выделения флуктуаций сигнала по амплитуде. Согласно [7] тип детектирования не является принципиальным. Далее сигналы в каждой ветке независимо поступают каждый в свой фильтр низкой частоты 4.1-4.n, реализованный согласно [13], задача которого подавлять частоты, превышающие верхнюю полезную частоту флуктуаций сигнала в диапазоне качки корабля на взволнованной поверхности. Далее сигналы в каждой ветке независимо поступают каждый в свой спектроанализатор 5.1-5.n. В спектроанализаторах осуществляется вычисление энергетического спектра в диапазоне флуктуаций сигнала, обнаружение наличия флуктуаций сигнала, обусловленных качкой, и определение их периода. Вычисление спектра реализуется согласно [13] методом быстрого преобразования Фурье. Для обнаружения наличия флуктуаций сигнала и определения их периода могут использоваться процедуры способа [6], позволяющие дополнительно определить отношение сигнала к помехе и увеличить помехоустойчивость обнаружения флуктуаций при любой заранее неизвестной ширине спектра флуктуаций. Затем периоды флуктуаций и соответствующие им отношения сигнал/помеха, полученные каждый для своей октавной полосы частот шумового сигнала, одновременно поступают в вычислительное устройство 6.
Вычислительное устройство содержит два последовательно соединенных блока: многоканальный блок выбора периода флуктуаций и блок определения водоизмещения корабля.
Выбор периода флуктуаций осуществляется на основании сравнения между собой отношений сигнала к помехе, которые соответствуют периодам, полученным в параллельных ветках обработки сигнала 2.1-5.1 - 2.n-5.n. Выбирается тот период, который соответствует максимальному значению отношения сигнала к помехе.
В последнем блоке устройства определяется водоизмещение надводного корабля по табличной зависимости водоизмещения от периода флуктуаций сигнала, обусловленных качкой [3].
Все изложенное позволяет считать задачу изобретения решенной. Предложено устройство определения водоизмещения надводного корабля при его шумопеленговании, обладающее повышенной помехоустойчивостью, которое может быть использовано в составе судовых гидроакустических средств наблюдения для распознавания морских судов разного водоизмещения по их шумоизлучению.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Бородай И.К. и др. Прикладные задачи динамики судов на волнении. П.: Судостроение, 1989
2. Бородай И.К., Нецветаев Ю.А. Мореходность судов. П.: Судостроение, 1982
3. Сизов В.Г. Теория корабля: Учебн. пособ. / Одесск. национальн. морская акад. - Одесса: ФЕНЖС, 2003. 284 с.
4. Кудрявцев А.А., Лугинец К.П., МашошинА.И. Об амплитудной модуляции подводного шумоизлучения гражданских судов // Акустический журнал. 2003. Том 49. №2 С. 224-228
5. Бирюкова Е.С, Шенгелия М.В. Применение критерия Фишера проверки статистических гипотез в одной из задач классификации объектов // Материалы НТК МС ОАО «Концерн «Океанприбор». 2009. С. 163-164
6. Консон А.Д., Волкова А.А. Патент РФ №2645013 от 15.02.2018. Способ определения водоизмещения надводного корабля при его шумопеленговании. МПК G01S 3/80
7. Машошин А.И. Оптимизация устройства обнаружения и измерения параметров амплитудной модуляции подводного шумоизлучения морских судов // Акустический журнал. 2013. том 59. №3. С. 347-353
8. Консон А.Д., Волкова А.А. Спектральные свойства флуктуаций подводного шумоизлучения морских судов / Сб. докл. XIV всеросс. конф. «Прикладные технологии гидроакустики и гидрофизики». СПб.: СПбНЦ РАН. 2018
9. Литвиненко С.Л. Патент РФ №2515133 от 10.05.2014 Сферическая гидроакустическая антенна. МПК G01S 15/00
10. Смарышев М.Д., Черняховский А.Е., Иванов A.M., Шатохин А.В., Селезнев И.А., Никандров В.А., Маляров К.В., Барсуков Ю.В. Патент РФ №2539819 от 27.01.2015. Антенный модуль с цифровым выходом. МПК H04R 1/44
11. Бетелин В.Б., Капустин Г.И., Кокурин В.А., Корякин Ю.А., Лисс А.Р., Немытов А.И., Першин А.С., Рыжиков А.В., Челпанов А.В., Шалин С.А. Патент РФ №2207620 от 10.03.2003. Цифровой вычислительный комплекс для обработки сигналов в гидроакустических системах. МПК G06F 15/16, G01S 15/88
12. Волкова А.А., Консон А.Д., Никулин М.Н. Оценка расстояния до источника шумового сигнала методом «оптимальных частот» с использованием полосовых фильтров // Гидроакустика. 2015. Вып. 22(2). С. 43-52
13. Рабинер П., Гоулд Б. Теория и применение цифровой обработки сигналов. Пер. с англ. М.: Мир, 1978
Изобретение относится к области гидроакустики и предназначено для распознавания морских судов разного водоизмещения по их шумоизлучению. Устройство, содержащее между выходом акустической приемной антенны шумопеленгования и входом вычислительного устройства ветку последовательно соединенных блоков: полосовой фильтр, амплитудный детектор, фильтр низкой частоты, спектроанализатор, отличающееся тем, что между выходом акустической приемной антенны шумопеленгования и входом вычислительного устройства введены параллельно не менее двух новых веток последовательно соединенных блоков: полосовой фильтр, амплитудный детектор, фильтр низкой частоты, спектроанализатор, при этом параллельные ветки однотипных блоков различаются диапазоном частот полосовой фильтрации, а вычислительное устройство содержит последовательно соединенные многоканальный блок выбора периода флуктуаций и блок определения водоизмещения корабля. Техническим результатом изобретения является повышение помехоустойчивости и обеспечение возможности определения водоизмещения надводного корабля при любой заранее неизвестной области частот шумового сигнала, в которой проявляются низкочастотные флуктуации, обусловленные качкой на волнении поверхности моря. 1 з.п. ф-лы, 1 ил.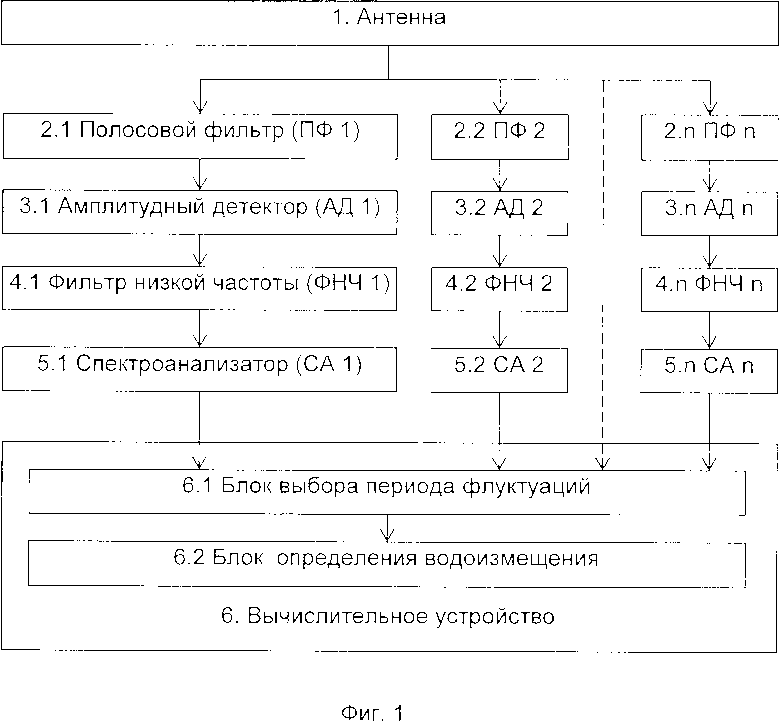
1. Устройство определения водоизмещения надводного корабля при его шумопеленговании, в котором между выходом акустической приемной антенны и входом вычислительного устройства включена первая ветка блоков в виде последовательно соединенных полосового фильтра, амплитудного детектора, фильтра низкой частоты и спектроанализатора, отличающееся тем, что между выходом акустической приемной антенны и входом вычислительного устройства параллельно первой ветке блоков подключены по крайней мере две новые ветки блоков, содержащие каждая последовательно соединенные полосовой фильтр, амплитудный детектор, фильтр низкой частоты и спектроанализатор, при этом полосовые фильтры всех параллельных веток блоков, включая первую, имеют различные диапазоны частот полосовой фильтрации, а вычислительное устройство содержит последовательно соединенные многоканальный блок выбора периода флуктуаций, вход которого является входом вычислительного устройства, и блок определения водоизмещения корабля.
2. Устройство по п. 1, отличающееся тем, что нижняя частота полосового фильтра первой ветки равна начальной частоте приемного тракта, а верхняя частота полосового фильтра последней ветки равна конечной частоте приемного тракта.
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ КВАДРАТУРНОГО ПРИЕМНИКА | 2013 |
|
RU2549207C2 |
| УСТРОЙСТВО ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩЕМ В МОРЕ ОБЪЕКТЕ | 2015 |
|
RU2590933C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2298203C2 |
| СПОСОБ КЛАССИФИКАЦИИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКОГО ОБЪЕКТА | 2013 |
|
RU2546851C1 |
| СПОСОБ КЛАССИФИКАЦИИ ШУМЯЩИХ ОБЪЕКТОВ | 2003 |
|
RU2262121C2 |
| US 5886661 A1, 23.03.1999. | |||

