Настоящее изобретение относится к устройству с множеством штативов для размещения емкостей с биологическим продуктом, выгружаемых из хранилища для хранения упомянутых емкостей, связанного с лабораторной автоматизированной системой.
В настоящее время в лабораториях для испытаний образцов биологического материала, хранилища для хранения образцов биологического материала при предпочтительно очень низких, регулируемых температурах все более часто расположены совместно с автоматизированными системами. Цель состоит в том, чтобы обеспечить сохранность таких образцов и возможность повторного использования образцов, которые ранее подвергались обработке посредством различных модулей совместно с автоматизированной системой, даже через несколько дней после отбора. Очень часто необходимо осуществление второй серии испытаний упомянутого образца, чтобы проверить и, возможно, подтвердить полученные результаты, и поэтому предпочтительно хранить образец надлежащим образом.
Необходимо сделать ссылку на патент ЕР-2240787, ранее зарегистрированный данным заявителем, для более подробного описания хранилища данного типа.
После того как было установлено, что образец больше не нужен и поэтому может быть ликвидирован, или что просто истек его срок жизни (и следовательно испытания больше невозможны, поскольку образец больше непригоден), он должен быть удален из хранилища, и это осуществляется посредством перемещения емкости с биологическим материалом, или пробирки, к соответствующей выпускной трубе, откуда образец выталкивается.
В известных решениях около хранилища размещают один разгрузочный коллектор, используемый для размещения выталкиваемых пробирок.
В решении данного типа возникают проблемы, поскольку наличие одного разгрузочного коллектора предполагает, что как только он будет заполнен, он должен быть опорожнен и, естественно, во время данной операции работа хранилища должна быть остановлена, чтобы предотвратить выталкивание пробирок через выпускную трубу именно тогда, когда разгрузочный коллектор отсутствует, поскольку работник осуществляет его разгрузку.
Как следствие этого, с учетом все более высоких объемов работы испытательной лаборатории и соответственно того факта, что выгрузка пробирок из хранилища может осуществляться непрерывно в течение дня, было бы целесообразно создать значительно более вместительное устройство для сбора выталкиваемых пробирок, при этом не увеличивая размеры разгрузочного коллектора. По возможности, высокая емкость упомянутого устройства должна гарантировать, что оно может работать в течение ночи, и соответственно быть объединено с хранилищем, работающим в течение ночи.
Эти и другие цели достигаются посредством устройства с множеством штативов для размещения емкостей с биологическим продуктом, выгружаемых из хранилища для хранения упомянутых емкостей, соединенного с лабораторной автоматизированной системой, причем упомянутое устройство отличается тем, что оно содержит нечетное число упомянутых штативов, которые размещены в пределах платформы, содержащей некоторое количество участков, число которых равно упомянутому нечетному числу плюс один, причем упомянутые штативы горизонтально или вертикально перемещаются с одного участка на другой упомянутой платформы, используя преимущество наличия временно незанятого участка, причем упомянутые штативы в дальнейшем занимают по очереди рабочий участок, который будучи вертикально расположенным по отношению к выпускной трубе упомянутого хранилища, размещает упомянутые емкости с биологическим продуктом, выгружаемые из упомянутого хранилища.
Эти и другие признаки настоящего изобретения станут более понятными из приведенного ниже подробного описания варианта его осуществления, показанного в качестве неограничивающего примера в прилагаемых чертежах, из которых:
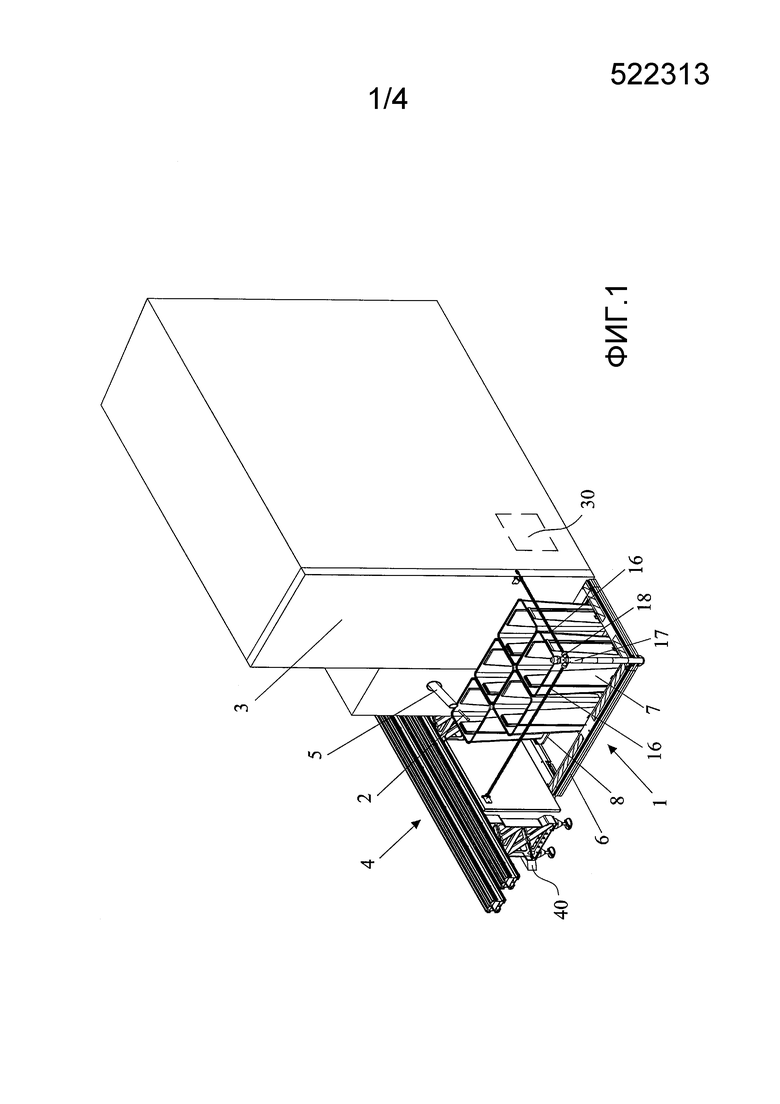
Фиг. 1 показывает перспективный вид устройства с множеством штативов и его расположение относительно выпускного отверстия хранилища и автоматизированной системы;
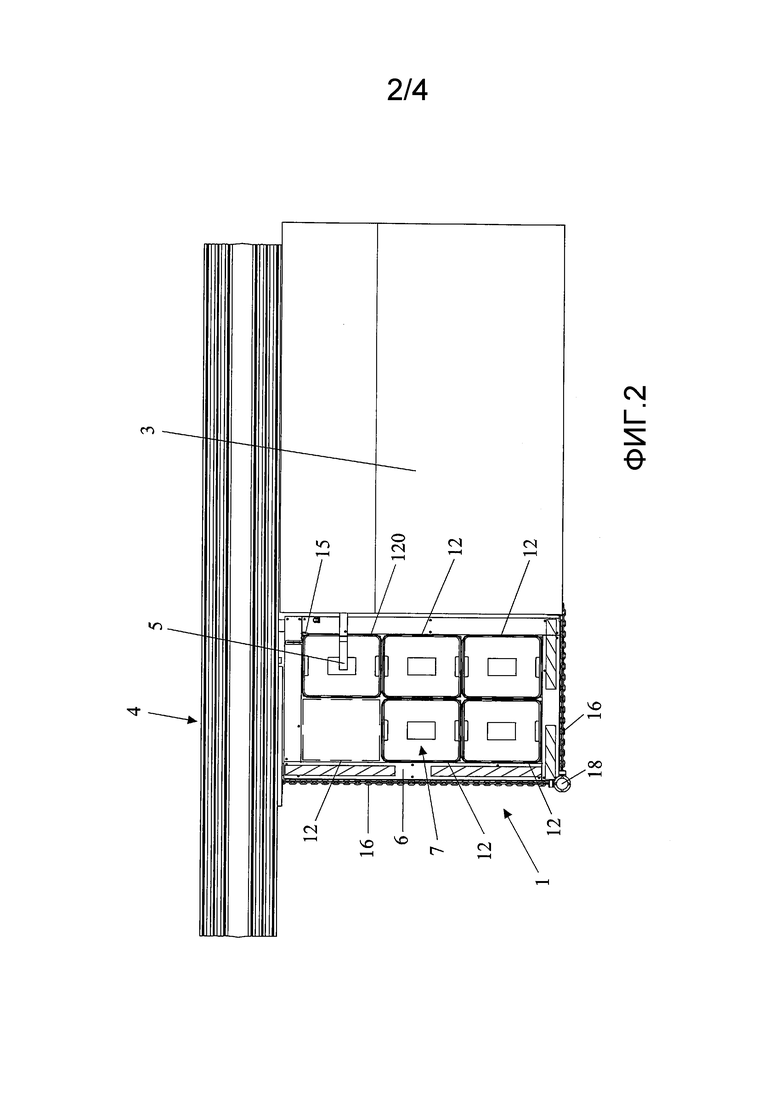
Фиг. 2 представляет собой вид сверху чертежа, показанного на фиг. 1;
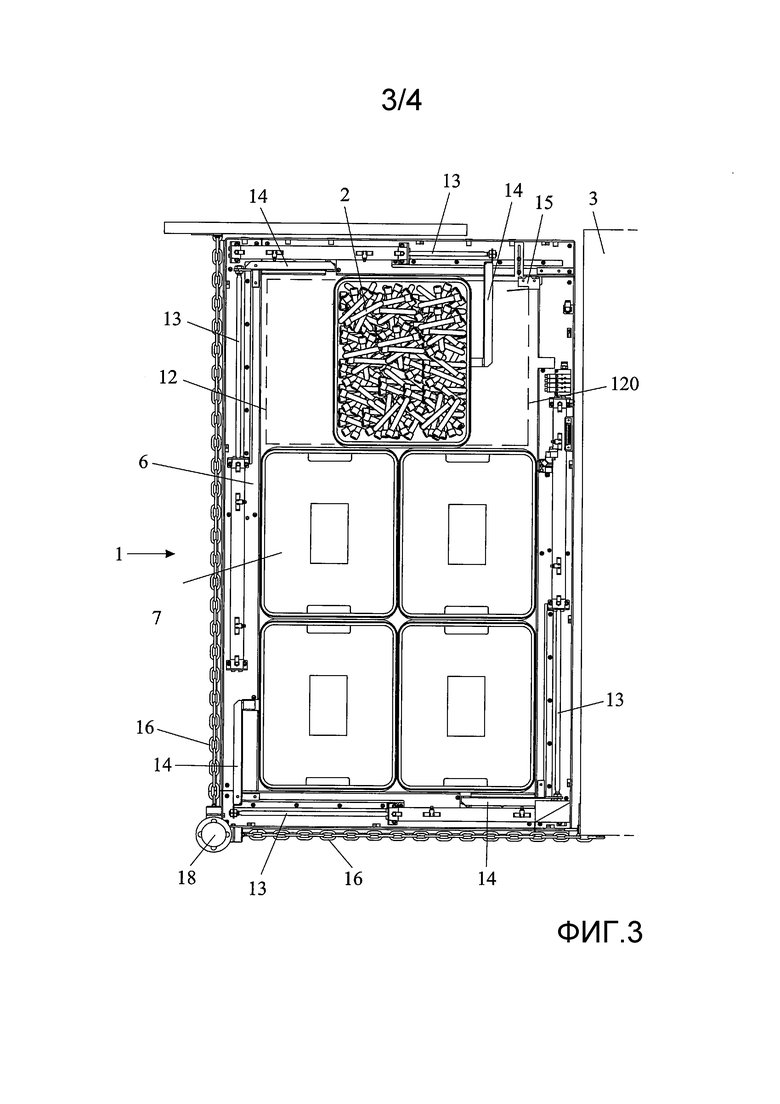
Фиг. 3 представляет собой вид сверху детали устройства во время этапа перемещения штатива, при этом удалена выпускная труба и выделены некоторые детали, расположенные вдоль периметра платформы;
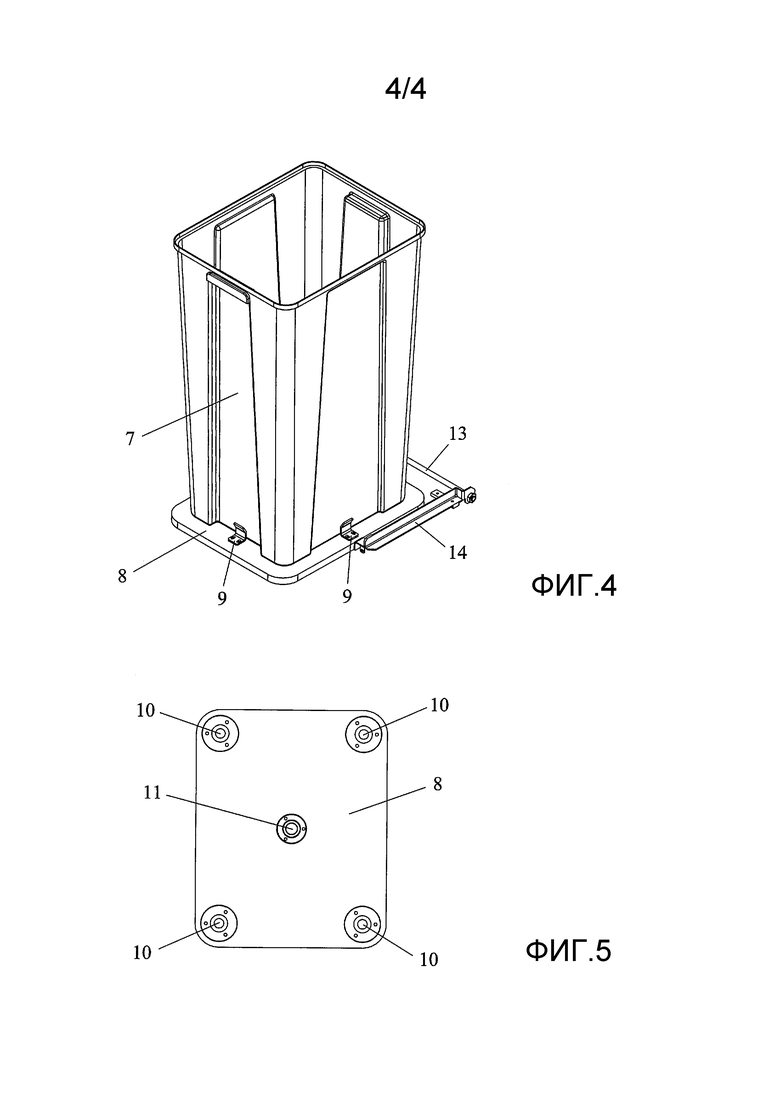
Фиг. 4 показывает перспективный вид штатива и платформы, на которой он располагается;
Фиг. 5 показывает вид снизу платформы.
Устройство 1 для размещения емкостей с биологическими продуктами, или пробирок, 2, выгружаемых из хранилища 3, расположено около хранилища 3, которое в свою очередь используется для загрузки/выгрузки пробирок 2 в/из автоматизированной системы 4, только один участок которой показан (фиг. 1, 2).
В частности, устройство 1 расположено рядом с хранилищем 3, которое содержит выпускную трубу 5, используемую для удаления пробирок 2 из хранилища 3. Фактически пробирки 2 остаются в хранилище 3 в течение заданного периода времени с возможностью выборки при необходимости совместно с системой 4 для проведения новых испытаний или повторения предыдущего испытания; как только максимальное время хранения пробирок 2 в хранилище 3 истекает, по истечении которого они должны быть удалены, поскольку содержащийся в них биологический материал считается уже непригодным, и поэтому уже не может быть использован для диагностических целей, пробирки 2 подхватываются посредством манипуляционного устройства внутри хранилища 3 и перемещаются к выпускной трубе 5.
При этом хранилище 3 представляет собой известное охлаждаемое хранилище, однако приведенное ниже описание не изменяется в случае обычного устройства для хранения пробирок 2 с биологическим материалом, содержащего выпускную трубу 5.
Устройство 1 содержит платформу 6, которая вмещает в себя заданное количество штативов 7, каждый из которых располагается на платформе 8, имеющей размеры, по существу равные основанию каждого штатива 7. Каждая платформа 8 содержит четыре фиксатора 9 на верхней поверхности, по одному на каждой стороне, чтобы закреплять штатив 7 (фиг. 4), и четыре колеса 10 на нижней поверхности в ее четырех углах, чтобы способствовать ее скользящему перемещению по поверхности платформы 6, и резиновую прокладку 11 в середине (фиг. 5).
На платформе 6 размещается нечетное количество штативов 7 и соответственно платформ 8, которые перемещаются или горизонтально или вертикально и занимают некоторое количество нерабочих участков 12, 120 (показанных по этой причине пунктирной линией на фиг. 2 и 3), число которых равно числу штативов 7 плюс один. На практике, один из участков 12, 120 в пределах платформы 6 остается незанятым, т.е. не занятым каким бы то ни было штативом 7, в соответствии с разными моментами времени.
В показанном варианте осуществления предусмотрено пять штативов 7 и соответственно шесть участков 12, 120, однако понятно, что упомянутое решение может быть приспособлено к любому количеству участков 12, 120 и соответственно штативов, при условии что предусмотрено четное число участков и соответственно нечетное число штативов. Фактически все штативы 7 должны быть расположены всегда вдоль периметра платформы 6, поскольку их скользящее перемещение обеспечивается наличием пневматических цилиндров 13, которые перемещаются точно вдоль периметра платформы 6, скрытые от зрения боковым профилем самой платформы 6 (они показаны только на фиг. 3, поскольку такой боковой профиль удален); при этом перпендикулярно цилиндру 13 соответственно подсоединен рычаг 14, каковой рычаг 14 перемещается цилиндром 13 и оказывает воздействие на боковую поверхность платформы 8 (фиг. 4), таким образом, перемещая соответствующий штатив 7 с одного участка 12, 120 на другой.
Предусмотрен также датчик 15 для обнаружения присутствия одного из штативов 7 в рабочем участке 120, т.е. участке, который является вертикально расположенным по отношению к выпускной трубе 5, который размещает пробирки 2, выгружаемые из хранилища 3.
Устройство 1 содержит две цепочки 16, которые ограничивают площадь, в пределах которой находится устройство 1 в целях безопасности; кроме того, на вершине стойки 17, к которой прикреплены две цепочки 16, установлен световой сигнализатор 18, который выполняет функцию сигнала предупреждения/тревоги при размещении штативов 7.
Блок 30 управления хранилища 3 ведет подсчет пробирок 2, выгружаемых через трубу 5 в штатив 7, который занимает рабочий участок 120. В свою очередь, блок 30 управления взаимодействует с блоком 40 управления всей автоматизированной системы 4, который ведет подсчет количества заполненных штативов 7 внутри устройства 1.
Начало процесса выгрузки пробирок 2, которые больше непригодны для диагностических целей, из хранилища 3 предполагает присутствие штатива 7 в рабочем участке 120, в соответствии с вертикалью по отношению к выпускной трубе 5 (и показанном справа вверху на фиг. 2 и 3).
В случае отсутствия штатива 7 в таком рабочем участке 120, выпускное 2 пробирок из хранилища 3 остается закрытым до тех пор, пока устройство 1 не установит штатив в таком участке 120; выгрузка пробирок 2 из хранилища 3 начинается тогда, когда будет достигнуто такое положение, которое надлежащим образом регистрируется датчиком 15 присутствия, входящим в контакт со штативом 7.
В соответствии с предварительно осуществленной оценкой емкости каждого штатива 7, хранилище 3 приспособлено для подсчета (посредством блока 30 управления) количества пробирок 2, выгружаемых последовательно, и для активации вращения штативов 7 в устройстве 1, если штатив 7 заполнен, т.е. когда результат подсчета достигает заданного числа, которое означает состояние заполненного штатива 7; одновременно блок 30 управления хранилища 3 оповещает блок 40 управления всей системы 4, и последний увеличивает подсчет числа заполненных штативов 7 в устройстве 1 на один.
Блок 30 управления хранилища 3, в состоянии заполненного штатива 7, прекращает выгрузку пробирок 2 из трубы 5, одновременно активируя процесс перемещения штативов 7, который включает в себя последовательное приведение в действие каждого из цилиндров 13 и соответствующих рычагов 14 для перемещения штативов 7 с одного участка 12, 120 на другой. На фиг. 3 показано, например, первое из таких скользящих перемещений, т.е. отделение только что заполненного штатива 7 от рабочего участка 120.
В варианте осуществления, показанном в чертежах, после такого первого скользящего перемещения, рабочий участок 120 может быть сразу же занят новым незаполненным штативом 7; при этом вхождение в контакт такого нового штатива 7 с датчиком 15 присутствия позволяет хранилищу 3 возобновить операцию выгрузки новых пробирок 2 через трубу 5. При этом скользящее перемещение штативов 7 вдоль периметра платформы 6 устройства 1 прекращается, т.е. штативы 7 вновь занимают положения, показанные на фиг. 2.
Как было упомянуто выше, рычаги 14 по существу примыкают к платформам 8 в основании каждого штатива 7 (фиг. 4); причем размер платформ 8 откалиброван так, чтобы точно соответствовать площади, занимаемой платформой 6 (за вычетом незанятого участка 12, 120), и поэтому их перемещение обеспечивается только в одном направлении. Скользящему перемещению платформ 8 вдоль платформы 6, конечно, способствует наличие колес 10 на нижнем основании. Каждый рычаг 14, посредством приведения в движение на боковой поверхности платформы 8, способен перемещать одну или несколько платформ 8 и соответственно штативов 7, в соответствии с условиями и в соответствии с положением незанятого участка 12, 120.
Таким образом, штативы 7 перемещаются только либо горизонтально, либо вертикально посредством использования степени свободы, предоставляемой всякий раз наличием незанятого участка 12, 120; по существу достигается эффект вращения штативов 7 против часовой стрелки по периметру платформы 6.
Как только начинается какое бы то ни было перемещение штативов 7 по всему устройству 1, световой сигнализатор 18 начинает мигать, показывая, что процесс перемещения штативов 7 начинается. После этого световой сигнализатор 18 остается постоянным во время такого перемещения и со временем в конце гаснет.
Значительное вращение штативов 7 повторяется, как описано выше, для каждой операции заполнения нового штатива 7; при этом подсчет количества заполненных штативов 7 всегда увеличивается на один посредством блока 40 управления, и в то же время выгрузка пробирок 2 из хранилища 3 временно прекращается до тех пор, пока новый незаполненный штатив 7 не достигнет рабочего участка 120.
После заполнения последнего штатива 7 (т.е. пятого в варианте осуществления, показанном в чертежах), блок 40 управления, подсчет которого достиг максимальной допустимой величины, т.е. количества таких штативов 7, активирует индикацию «заполненный штатив».
В этот момент, работники лаборатории должны опорожнить штативы 7; при этом хранилище 3 остается закрытым для выгрузки пробирок 2, а также для любой другой деятельности (т.е. хранилище 3 находится в режиме офлайн) до тех пор, пока данная операция не будет осуществлена. Очевидно, что никакого другого вращения штативов 7 в устройстве 1 не происходит.
Один или несколько работников вручную снимают штативы 7, опорожняют их все предпочтительно в конкретные емкости, предусмотренные для окончательного удаления пробирок 2, и снова устанавливают их на соответствующую платформу 8 (естественно, каждый штатив 7 должен находиться точно на платформе 8, которая вмещала его раньше), и затем осуществляется возврат в исходное состояние в блоке 8 управления, который позволяет обнулить подсчет и вновь начать работу хранилища 3; при этом может быть возобновлена выгрузка пробирок 2 через трубу 5 и соответственно заполнение штативов 7.
Поскольку подсчет заполнения одного штатива 7 и подсчет количества заполненных штативов 7, как было упомянуто выше, осуществляются посредством двух разных блоков, т.е. посредством блока 30 управления хранилища 3 и посредством блока 40 управления автоматизированной системы 4, соответственно, удобно не опорожнять один заполненный штатив 7, а подождать пока заполнятся все штативы 7. В действительности, ручное удаление одного штатива 7 из устройства 1 с целью его опорожнения на ходу, пока хранилище 3 не закрыто, не может быть правильно распознано блоком 40 управления, который способен осуществлять только последовательный подсчет до максимального допустимого числа (пяти в показанном варианте осуществления) и обнулять подсчет, когда все штативы 7 опорожнены, но не способен уменьшать такой подсчет, если опорожняют только один штатив 7.
Устройство 1 выполнено так, чтобы оставаться функционирующим в частности в течение ночи, параллельно с работой хранилища 3 (которое должно подсчитывать выгруженные пробирки 2) и автоматизированной системы 4 (которая, возможно, должна увеличивать подсчет заполненных штативов 7). Во всех случаях, если систему 4 выключают вследствие потребностей логистики испытательной лаборатории, то хранилище 3 и автоматизированная система 4 (в частности, соответствующие блоки 30 и 40 управления) хранят свои подсчеты для последующего повторного включения, и поэтому отсутствует риск потери данных учета ситуации, которые были получены ранее (например, накануне).
Таким образом, инновационным аспектом настоящего изобретения является возможность увеличения времени, которое проходит между операциями опорожнения штативов 7, которые собирают выгруженные пробирки 2 (поскольку они уже не могут быть использованы для диагностических целей) из хранилища 3, используемого для их хранения, посредством ответственных работников лаборатории. Известные решения фактически используют один штатив, который, предположительно, должен опорожняться с большей частотой, соответственно предусматривая большую занятость работников.
Таким образом, в известных системах трудно представить себе возможность оставить хранилище 3 и соответственно устройство 1, работающими ночью, поскольку один штатив 7 обязательно будет заполняться в течение этого времени, и следовательно хранилище 3 рано или поздно будет закрыто; по существу не позволяя поддерживать его работающим ночью; в то время как вышеупомянутое решение выдерживает в пять раз большее количество выгруженных пробирок 2 (в описанном варианте осуществления) и таким образом способно работать, например, всю ночь без полного заполнения всех штативов 7 и соответственно прекращения работы хранилища 3. Это позволяет значительно повысить эффективность эксплуатации хранилища 3 и соответственно всей автоматизированной системы 4.
Описанное изобретение допускает некоторые изменения и варианты, которые все находятся в пределах объема идеи настоящего изобретения.
На практике, используемые материалы, а также формы и размеры могут быть любыми, соответствующими требованиям.
Изобретение относится к испытаниям образцов биологического материала. Лабораторная автоматизированная система, содержащая хранилище для сохранения емкостей с биологическим продуктом и устройство со множеством штативов для размещения емкостей с биологическим продуктом, выгружаемых из упомянутого хранилища, причем упомянутое устройство содержит нечетное количество штативов, которые могут быть размещены в пределах платформы, имеющей множество участков, число которых равно упомянутому нечетному числу плюс один, причем упомянутые штативы выполнены с возможностью горизонтального или вертикального перемещения с одного участка упомянутой платформы на другой участок, пользуясь наличием временно незанятого участка, при этом упомянутые штативы по очереди занимают рабочий участок, на котором, будучи вертикально расположенным по отношению к выпускной трубе упомянутого хранилища, размещаются упомянутые емкости с биологическим продуктом, выгружаемые из упомянутого хранилища, при этом хранилище содержит блок управления хранилища, который ведет подсчет емкостей с продуктом, выгружаемых через выпускную трубу в один из штативов, который в свою очередь занимает рабочий участок , и блок управления хранилища запускает перемещение упомянутых штативов с одного участка на другой, когда один из штативов, который в свою очередь занимает рабочий участок, заполнен заданным числом емкостей с биологическим материалом. Достигается повышение эффективности и надежности испытаний. 8 з.п. ф-лы, 5 ил.
1. Лабораторная автоматизированная система (4), содержащая хранилище (3) для сохранения емкостей (2) с биологическим продуктом и устройство (1) со множеством штативов для размещения емкостей (2) с биологическим продуктом, выгружаемых из упомянутого хранилища (3), отличающаяся тем, что упомянутое устройство (1) со множеством штативов содержит нечетное количество штативов (7), которые могут быть размещены в пределах платформы (6), имеющей множество участков (12, 120), число которых равно упомянутому нечетному числу плюс один, причем упомянутые штативы (7) выполнены с возможностью горизонтального или вертикального перемещения с одного участка (12, 120) упомянутой платформы (6) на другой участок, пользуясь наличием временно незанятого участка (12, 120), при этом упомянутые штативы (7) по очереди занимают рабочий участок (120), на котором, будучи вертикально расположенным по отношению к выпускной трубе (5) упомянутого хранилища (3), размещаются упомянутые емкости (2) с биологическим продуктом, выгружаемые из упомянутого хранилища (3),
при этом хранилище (3) содержит блок (30) управления хранилища, который ведет подсчет емкостей с продуктом, выгружаемых через выпускную трубу (5) в один из штативов (7), который в свою очередь занимает рабочий участок (120), и
блок (30) управления хранилища запускает перемещение упомянутых штативов (7) с одного участка (12, 120) на другой, когда один из штативов (7), который в свою очередь занимает рабочий участок (120), заполнен заданным числом емкостей (2) с биологическим материалом.
2. Лабораторная автоматизированная система (4) по п.1, отличающаяся тем, что содержит блок (40) управления лабораторной автоматизированной системы, который подсчитывает число штативов (7), заполненных емкостями (2) для биологического продукта.
3. Лабораторная автоматизированная система (4) по п.1 или 2, отличающаяся тем, что каждый из упомянутых штативов (7) расположен на платформе (8) одного штатива, размеры которой выполнены так, что совокупность упомянутых платформ (8) одного штатива точно соответствует поверхности упомянутой платформы (6) за вычетом упомянутого временно незанятого участка (12, 120).
4. Лабораторная автоматизированная система (4) по п.3, отличающаяся тем, что упомянутая платформа (8) одного штатива содержит фиксаторы (9) на верхнем основании для того, чтобы удерживать упомянутые штативы (7), и колеса (10) на нижнем основании для того, чтобы способствовать ее перемещению по упомянутым участкам (12, 120) упомянутой платформы (6).
5. Лабораторная автоматизированная система (4) по п.1 или 2, отличающаяся тем, что перемещение одного или более штативов (7) с одного участка (12, 120) упомянутой платформы (6) на другой осуществляется посредством воздействия рычага (14), выступающего из периметра упомянутой платформы (6), на боковую поверхность одной из упомянутых платформ (8) одного штатива, вмещающих один из штативов (7), причем каждая сторона упомянутой платформы (6) имеет упомянутый рычаг (14).
6. Лабораторная автоматизированная система (4) по п.5, отличающаяся тем, что перемещение упомянутых штативов (7) с одного участка (12, 120) на другой осуществляется с помощью множества пневматических цилиндров (13), перемещающихся по периметру упомянутой платформы (6).
7. Лабораторная автоматизированная система (4) по п.6, отличающаяся тем, что каждый из упомянутых рычагов (14) связан с каждым из пневматических цилиндров (13), причем рычаги (14) перемещаются с пневматическими цилиндрами (13) до упора в боковую поверхность платформы (8) одного штатива.
8. Лабораторная автоматизированная система (4) по п.1 или 2, отличающаяся тем, что упомянутое устройство (1) со множеством штативов содержит датчик (15) присутствия, выполненный с возможностью обнаружения присутствия одного из упомянутых штативов (7) на упомянутом рабочем участке (120).
9. Лабораторная автоматизированная система (4) по п.1 или 2, отличающаяся тем, что упомянутое устройство (1) со множеством штативов содержит световой сигнализатор (18), выполненный с возможностью выполнения функции сигнала предупреждения/тревоги во время перемещения упомянутых штативов (7).
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Способ получения огнеупорных материалов | 1949 |
|
SU84381A1 |
| DE 202007002753 U1, 26.04.2007 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| US 6551556 B1, 22.04.2003. | |||

