Изобретение относится к машиностроению и может быть применено в поршневых двигателях и компрессорах.
Известны звездообразные поршневые двигатели внутреннего сгорания, содержащие расположенные по окружности цилиндры с поршнями, соединенными с помощью шатунов с общим силовым кривошипом посредством установленной на кривошипе обоймы, с которой один из шатунов, называющийся коренным, соединен жестко, а остальные шатуны, называющиеся прицепными, соединены шарнирно (см., например, Г.А. Кузьмин. Конструкция авиационных двигателей. М: Оборонгиз, 1962 г., cтр. 367, фиг. 18.7).
Недостатком такой кинематической схемы является конструктивная, кинематическая и динамическая асимметричность работы цилиндров, что заставляет удлинять шатуны, увеличивая тем самым массу и габариты конструкции.
Целью изобретения является обеспечение конструктивной и функциональной симметричности всех цилиндров звездообразной поршневой машины.
Предлагается механизм звездообразной поршневой машины, содержащий расположенные по окружности цилиндры с поршнями, соединенными с помощью шатунов с общим силовым кривошипом посредством установленной на кривошипе, общей для всех шатунов, обоймы, с которой указанные шатуны соединены шарнирно.
Цель достигается тем, что указанная обойма дополнительно соединена с основанием механизма посредством шарнирного параллелограммного механизма. При этом коренной шатун устраняется, т.е. все шатуны в механизме соединятся с обоймой кривошипа шарнирно. При этом обойма может совершать только поступательные перемещения, при которых нижние головки всех прицепных шатунов движутся по одинаковым окружностям, а не по различным шатунным кривым, как в прототипе.
В одном из возможных вариантов выполнения предлагаемого механизма звездообразной поршневой машины указанный шарнирный параллелограммный механизм выполнен в виде тройного шарнирного параллелограмма, образованного двумя вспомогательными кривошипами, каждый из которых соединяет основание механизма с указанной обоймой и расположен параллельно силовому кривошипу.
При этом, в одном из вариантов, каждый из указанных вспомогательных кривошипов образован двумя взаимно параллельными рычагами, установленными шарнирно на взаимно противоположных стенках основания механизма и соединенных между собой осью, проходящей через отверстие в вышеуказанной обойме с возможность вращения в ней. Такое выполнение обеспечивает достижение требуемой прочности механизма при минимальной массе и практически без увеличения габаритов основания.
Изобретение поясняется нижеследующим детальным описанием примеров выполнения и тремя фигурами.
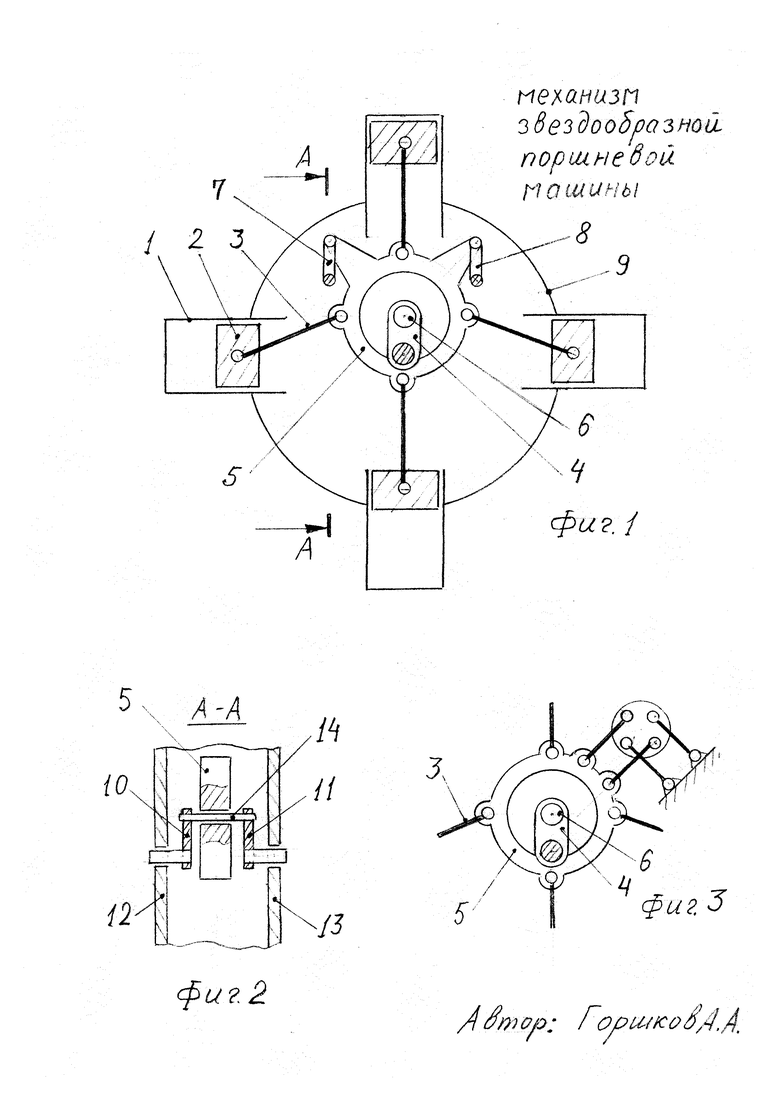
На фиг. 1 изображена кинематическая схема предлагаемого механизма в наиболее удобном для конструктивной реализации варианте.
На фиг. 2 показан вариант выполнения вспомогательного кривошипа - разрез плоскостью А-А, показанной на фиг. 1.
На фиг. 3 показан другой вариант возможного выполнения предлагаемого механизма, оправдывающий целесообразность применения многозвенной формулы изобретения.
Изображенный на фиг. 1 вариант предлагаемого механизма содержит расположенные по окружности цилиндры 1 с поршнями 2, соединенными с помощью шатунов 3 с силовым кривошипом 4 посредством общей для всех шатунов обоймы 5, установленной на кривошипной шейке 6 с возможностью вращения. При этом шатуны 3 всех цилиндров 1 соединены с обоймой 5 шарнирно. Имеются также вспомогательные кривошипы 7 и 8, каждый из которых соединяет обойму 5 с основанием 9 механизма. Причем вспомогательные кривошипы 7 и 8 ориентированы параллельно силовому кривошипу 4. Каждый из вспомогательных кривошипов 7 и 8 конструктивно выполнен в виде двух параллельных рычагов 10 и 11 (фиг. 2), шарнирно установленных на взаимно противоположных стенках 12 и 13 основания 9. Причем рычаги 10 и 11 соединены между собой осью 14, проходящей через отверстие в обойме 5, с возможностью вращения.
Работает предлагаемый механизм следующим образом. При вращении силового кривошипа 4 вспомогательные кривошипы 7 и 8, связанные с силовым кривошипом 4 обоймой 5, также начинают вращаться, обеспечивая обойме 5 поступательное движение по окружности. При этом шарнирно соединенные с обоймой 5 посредством шатунов 3 поршни 2 совершают в цилиндрах 1 одинаковые движения, отличающиеся только по фазе.
Возможны и другие варианты выполнения предлагаемого механизма. Например, шарнирный параллелограммный механизм, связывающий обойму 5 с основанием 9 может быть выполнен в виде двойного параллелограмма, как это изображено на фиг. 3. Однако этот вариант представляется менее предпочтительным в применении к двигателю внутреннего сгорания в отношении прочности и точности.
Возможны другие варианты конструктивного выполнения вспомогательного кривошипа. Например, он может быть консольного типа. Однако при этом он будет более громоздким и тяжелым.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕРТОЛЁТ | 2018 |
|
RU2742513C2 |
| ПОРШНЕВОЙ ДВИГАТЕЛЬ САХАРНОВА | 1997 |
|
RU2125162C1 |
| ПОРШНЕВАЯ МАШИНА | 2007 |
|
RU2348815C1 |
| Трехцилиндровый звездообразный двухтактный авиационный двигатель с центральными шатунами и поперечно-щелевой продувкой от внешнего нагнетателя | 2024 |
|
RU2830770C1 |
| БЕЗАЭРОДРОМНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2018 |
|
RU2746025C2 |
| ПОРШНЕВАЯ МАШИНА (ЕЕ ВАРИАНТЫ) | 1994 |
|
RU2096638C1 |
| ВТУЛКА ВОЗДУШНОГО ВИНТА С АВТОМАТОМ ПЕРЕКОСА | 2018 |
|
RU2746024C2 |
| СВОБОДНОПОРШНЕВОЙ ДВИГАТЕЛЬ | 2008 |
|
RU2445479C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1997 |
|
RU2146010C1 |
| САМОЛЁТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2018 |
|
RU2742496C2 |
Изобретение относится к области машиностроения и может быть применено в двигателях внутреннего сгорания и компрессорах. Механизм содержит обойму 5 силового кривошипа 4, с которой шарнирно связаны шатуны 3. Обойма дополнительно соединена с основанием 9 посредством параллелограммного механизма. Коренной шатун при этом может быть устранен. Этим обеспечивается конструктивная и функциональная симметричность работы всех цилиндров звездообразного механизма, что позволяет уменьшить габариты и вес. 2 з.п. ф-лы, 3 ил.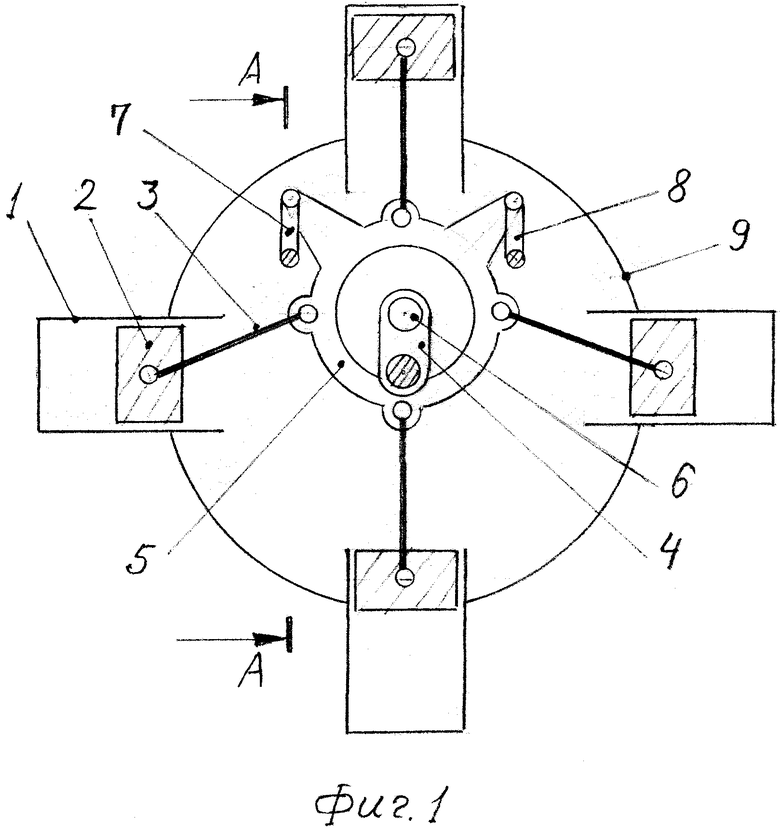
1. Механизм звездообразной поршневой машины, содержащий расположенные по окружности цилиндры с поршнями, соединенными с помощью шатунов с общим силовым кривошипом посредством установленной на кривошипе, общей для всех шатунов, обоймы, с которой указанные шатуны соединены шарнирно, отличающийся тем, что указанная обойма дополнительно соединена с основанием механизма посредством шарнирного параллелограммного механизма.
2. Механизм по п. 1, отличающийся тем, что указанный шарнирный параллелограммный механизм выполнен в виде тройного шарнирного параллелограмма, образованного двумя вспомогательными кривошипами, каждый из которых соединяет основание механизма с указанной обоймой и расположен параллельно силовому кривошипу.
3. Механизм по п. 2, отличающийся тем, что каждый из указанных вспомогательных кривошипов образован двумя взаимно параллельными рычагами, установленными шарнирно на взаимно противоположных стенках основания механизма и соединенных между собой осью, проходящей через отверстие в вышеуказанной обойме с возможностью вращения в ней.
| ПОРШНЕВАЯ МАШИНА | 2003 |
|
RU2262601C2 |
| Шатунно-кривошипный механизм для звездообразного двигателя | 1946 |
|
SU83695A1 |
| СПОСОБ (ВАРИАНТЫ) И ЭЛЕКТРОННОЕ УСТРОЙСТВО (ВАРИАНТЫ) ОПРЕДЕЛЕНИЯ РАСПОЛОЖЕНИЯ ТОЧКИ ОТНОСИТЕЛЬНО ПЕРВОГО МНОГОУГОЛЬНИКА В МНОГОМЕРНОМ ПРОСТРАНСТВЕ | 2014 |
|
RU2608870C2 |
| Дырокол | 1989 |
|
SU1708611A1 |

