Настоящая группа изобретений относится к области физического взаимодействия человека с виртуальной реальностью с биологической обратной связью и получению физических нагрузок при взаимодействии с ней и может быть использована в реабилитации последствий травм, связанных с опорно-двигательным аппаратом, для лечений фобий, в образовательных целях, при тренировках, в спорте, в играх и т.д.
Погружение в виртуальную реальность, а так же степень соотношения с ней определяются широтой и глубиной взаимодействия пользователя и персонажа виртуальной реальности. К глубине относятся факторы, связанные с качеством и, в основном, с аудиовизуальным восприятием. Человеческий глаз при повороте головы сможет заметить задержку реакции реальности до 50 мкс. То же самое происходит и со звуком, если источник звука, а так же его мощность и тональность неизменны, особенно это заметно при движении пользователя, то такие отклонения моментально определяются человеком, и он уже не отождествляет данное место с реальностью. К широте восприятия относятся все остальные составляющие, это как ощущение реальности по средством осязания, так и с учетом физического взаимодействия. За ощущения физического воздействия на пользователя ответственны: прямое физическое взаимодействие с предметами виртуальной реальности (любая работа с материальными и не материальными объектами), передвижение внутри виртуальной реальности, включая передвижение на транспортных средствах, а так же иные действия пользователя, спроецированные (переданные) на персонаж в виртуальной реальности, иные взаимодействия со средой виртуальной реальности, к ним относятся: ветер, температура, осадки и влажность. То есть все то, что может почувствовать человек. За глубину отвечают визуальные устройства, демонстрирующие виртуальную реальность, а за широту – устройства для прямого взаимодействия с виртуальной средой.
Известна заявка WO №2015002850 на изобретение «Система человекомашинного интерфейса» (заявители Rubin Jacob A (US), Crockett Robert S (US), опубл. 08.01.2015). Данная система человекомашинного интерфейса, имеющая экзо-скелет, включающий множество структурных элементов, соединенных друг с другом посредством, по меньшей мере, одного сочленения, выполненного с возможностью приложения силы к спинному сегменту пользователя; экзо-скелет включает носимую часть и участок точки приложения; носимая часть выполнена функционально связанной с участком точки приложения; система включает также, по меньшей мере, один локомоторный модуль, содержащий, как минимум, один сервомеханизм, способный приводить в действие, по меньшей мере, одно сочленение, при этом сервомеханизм имеет связь с экзо-скелетом. Тренажер включает приводимую в движение платформу, имеющую, по меньшей мере, три степени свободы вращения. Основание соединяется с внешней свободно вращающейся опорой через приводимое в движение вращающееся сочленение, способное обеспечить вращение вокруг оси. Свободно вращающаяся опора в свою очередь соединена с внутренней свободно вращающейся опорой через второе приводимое в движение вращающееся сочленение, выполненное с возможностью обеспечить вращение вокруг оси. Свободно вращающиеся опоры состоят, полностью или частично, из жесткого конструкционного материала. Участок точки приложения экзо-скелета и отсек соединяются с внутренней свободно вращающейся опорой через третье приводимое в движение вращающееся сочленение, выполненное с возможностью обеспечить вращение вокруг оси. Три указанных вращающихся сочленений соединены в отсеке. Каждое из этих сочленений приводится в движение с помощью устройства, содержащего электромеханический сервомотор (щеточный или бесщеточный электромотор постоянного тока или асинхронный или синхронный электродвигатель), соединенным с механизмом снижения скорости (редуктор). Узел привода преимущественно содержит потенциометр, датчик обратной связи или другой прибор. Одна или более из вышеупомянутых осей может по-разному оставаться зафиксированной относительно либо оси координат механического основании либо оси координат пользователя.
Экзо-скелет представляет собой защитную одежду, включающую внутренний костюм, препятствующий контакту между кожей пользователя и внутренней стороной конструкции, и выполненный из, например, эластана, хлопка, полиэстера или другого волокна и др. Защитная одежда имеет также средний слой, например, на основе пены, геля, резины или волокна, либо слой, выполненный в виде структуры, заполненной воздухом или другим газом. Внешняя оболочка одежды из, преимущественно, гибкого эластичного материала, выполняет роль покрытия экзо-скелета. Терминал, который включает участок точки приложения. Эта точка является физическим пространством, размещенным в средней точке использования терминала. Она содержит входные датчики и выходные преобразователи, которые преимущественно расположены с внешней стороны костюма и включают, например, тренажер перемещения тела в пространстве, систему доставки химреагента или датчики местоположения или угла поворота.
Из описания данной системы известен способ погружения в виртуальную реальность, который включает облачение пользователя в экзо-скелет, закрепление экзо-скелета в подвесе, подключение экзо-скелета и подвеса к центральному блоку управления, загрузку в центральный блок управления параметров виртуальной реальности, передачу на визуальный аппарат экзо-скелета изображений виртуальной реальности, считывание и распознавание изменения положения конечностей экзо-скелета, транслирование полученных данных об изменении положения конечностей экзо-скелета в виртуальную реальность, присвоение действий экзо-скелета персонажу виртуальной реальности, при этом в случае образования преграды на пути персонажа, передают стопорные сигналы на конечности экзо-скелета.
Подвес, применяемый для реализации известного способа, в сущности, включает основание, на котором закреплены три несущих рамы, соединенные между собой в двух своих вершинах и выполненные с возможностью вращения в разных относительно друг друга плоскостях, закрепленных на двух стойках, имеющих возможность движения как минимум в одной из плоскостей, и выполнен с возможностью подключения к центральному блоку управления, а на внутренней раме образовано крепление для фиксации экзо-скелета в ней.
Экзо-скелет, применяемый для реализации известного способа, в сущности, включает визуальный аппарат, выполненный с возможностью демонстрации изображений виртуальной реальности, и двигательный аппарат, снабженный креплением, выполненным с возможностью его фиксации в подвесе для погружения в виртуальную реальность, и выполненный с возможностью изменения положения конечностей и поворота головы и туловища, при этом он оснащен стопорными блоками, расположенными в узловых точках крепления его элементов.
Известные технические решения выбираются в качестве прототипов для заявляемых способа погружения в виртуальную реальность, подвеса и экзо-скелета, применяемых для его реализации, однако к их недостаткам можно отнести отсутствие возможности у пользователя присесть или сесть с такими же ощущениями, как при опоре на твердую поверхность, отсутствие возможности имитации движения под горку или в горку, отсутствие возможности ходьбы и иных движений кроме полета по наклонным поверхностям виртуальной реальности, отсутствие имитации катания на роликах или лыжах, отсутствие передачи климатических состояний (ветра, влажности, температуры), в случаях когда пользователь находится не ровно на «земле», а выполняет какие-то иные движения, связанные с отрывом его от поверхности, свободное движение рук и ног не возможно; отсутствие имитации и возможности ускорения.
Задачей настоящей группы изобретений является разработка нового способа погружения в виртуальную реальность, подвеса и экзо-скелета, применяемых для его реализации, с достижением следующего технического результата, а именно, устранение недостатков прототипа и повышение степени погружения в виртуальную реальность за счет одновременного увеличения количества допустимых действий пользователя при взаимодействии с виртуальной реальностью, благодаря увеличению степеней свободы конечностей пользователя в любом его пространственном положении, обеспечению возможности совершать различные движения ступнями (имитация катания на роликах, спуск с горы и т.д.) и обратного давления, и воссоздания соответствующей виртуальной реальности окружающей среды в помещении пользователя и передачи ускорения и перемещения в относительной системе координат пользователю.
Поставленная задача в части способа решена за счет того, что в известном способе погружения в виртуальную реальность, который включает по меньшей мере частичное облачение пользователя в экзо-скелет, закрепление экзо-скелета в подвесе, подключение экзо-скелета и подвеса к центральному блоку управления, загрузку в центральный блок управления параметров виртуальной реальности, передачу на визуальный аппарат экзо-скелета изображений виртуальной реальности, считывание и распознавание изменения положения конечностей экзо-скелета, транслирование полученных данных об изменении положения конечностей экзо-скелета в виртуальную реальность, присвоение действий экзо-скелета персонажу виртуальной реальности, при этом в случае образования преграды на пути персонажа, передают стопорные сигналы на конечности экзо-скелета, согласно настоящему изобретению, после загрузки в центральный блок управления параметров виртуальной реальности сравнивают параметры окружающей среды пользователя с параметрами окружающей среды виртуальной реальности, доводят параметры окружающей среды пользователя до параметров окружающей среды виртуальной реальности, отслеживают и выравнивают параметры окружающей среды с изменениями параметров окружающей среды виртуальной реальности в процессе погружения в нее, при этом для передачи изменения ускорения перемещения или в случае перемещения персонажа в относительной системе координат виртуальной реальности, на подвес передают сигналы линейного смещения экзо-скелета в пространстве по меньшей мере по одной координате, а в случае взаимодействия персонажа с другим объектом виртуальной реальности, оказывающим на него силовое воздействие, на экзо-скелет передают сигналы обратного давления.
Таким образом, всей совокупностью существенных признаков заявляемого способа достигается повышение степени погружения в виртуальную реальность за счет выравнивания климатических ощущений в виртуальной реальности и вокруг пользователя, а также за счет возможности ощутить ускорения и передвижение в относительной системе координат благодаря передаче на подвес сигналов линейного смещения экзо-скелета в пространстве по меньшей мере по одной координате и за счет возможности для пользователя ощутить реальное силовое воздействие на персонаж.
Поставленная задача в части подвеса решена за счет того, что в известном подвесе для погружения в виртуальную реальность, который включает основание, на котором закреплены три несущих рамы, соединенные между собой в двух своих вершинах и выполненные с возможностью вращения в разных относительно друг друга плоскостях, закрепленных на двух стойках, имеющих возможность движения как минимум в одной из плоскостей, и выполненный с возможностью подключения к центральному блоку управления, на внутренней раме образовано крепление для фиксации экзо-скелета в ней, согласно настоящему изобретению, крепление экзо-скелета расположено в раме таким образом, чтобы обеспечивать его фиксацию за поясничную область, дополнительно имеется система климат контроля, установленная с возможностью комплексного воздействия на экзо-скелет, и подвижная дорожка, установленная с возможностью взаимодействия со ступнями экзо-скелета, основание подвеса снабжено по меньшей мере одним устройством, выполненным с возможностью линейного перемещения экзо-скелета в пространстве.
Возможен вариант дополнительного снабжения внутренней рамы сидением.
Таким образом, всей совокупностью существенных признаков заявляемого подвеса достигается повышение степени погружения в виртуальную реальность, поскольку фиксация экзо-скелета за поясничную область позволяет пользователю совершать свободные движения руками, даже в случаях, когда пользователь находится не ровно на «земле», а выполняет какие-то иные движения, связанные с отрывом его от поверхности, одновременно с этим подвижная дорожка, установленная с возможностью взаимодействия со ступнями экзо-скелета, обеспечивает возможность совершать различные движения ступнями (имитация катания на роликах, спуск с горы и т.д.) и имитировать движения под горку или в горку, а снабжение основания подвеса по меньшей мере одним устройством, выполненным с возможностью линейного перемещения экзо-скелета в пространстве, позволяет передать ускорения и перемещения в относительной системе координат от персонажа к пользователю. При этом система климат контроля позволяет воссоздать соответствующую виртуальной реальности окружающую среду в помещении пользователя.
Поставленная задача в части экзо-скелета решена за счет того, что в известном экзо-скелете для погружения в виртуальную реальность, который включает визуальный аппарат, выполненный с возможностью демонстрации изображений виртуальной реальности, и двигательный аппарат, снабженный креплением, выполненным с возможностью его фиксации в подвесе для погружения в виртуальную реальность, и выполненный с возможностью изменения положения конечностей и поворота головы и туловища, при этом он оснащен стопорными блоками, расположенными в узловых точках крепления его элементов, согласно настоящему изобретению, упомянутое крепление расположено на поясничной области, в узловых точках крепления конечностей дополнительно имеются блоки обратного давления, а в ступни встроен вибрационный блок.
Возможен вариант, когда в местах бедренной, лучевой, плечевой, берцовой кости экзо-скелета предусмотрены пазы, выполненные с возможностью изменять и фиксировать необходимый размер его элементов.
Таким образом, всей совокупностью существенных признаков заявляемого экзо-скелета достигается повышение степени погружения в виртуальную реальность, поскольку фиксация экзо-скелета за поясничную область позволяет пользователю совершать свободные движения руками, даже в случаях, когда пользователь находится не ровно на «земле», а выполняет какие-то иные движения, связанные с отрывом его от поверхности, одновременно с этим блоки обратного давления, установленные в узловых креплениях конечностей, позволяют ощутить пользователю силовое воздействие, которое ощущает персонаж, а встраивание в ступни вибрационного блока позволяет пользователю точнее чувствовать их передвижение.
Сущность заявляемой группы изобретений поясняется далее совместно на примере чертежей.
На Фиг. 1 показан общий вид подвеса и закрепленного в нем экзо-скелета.
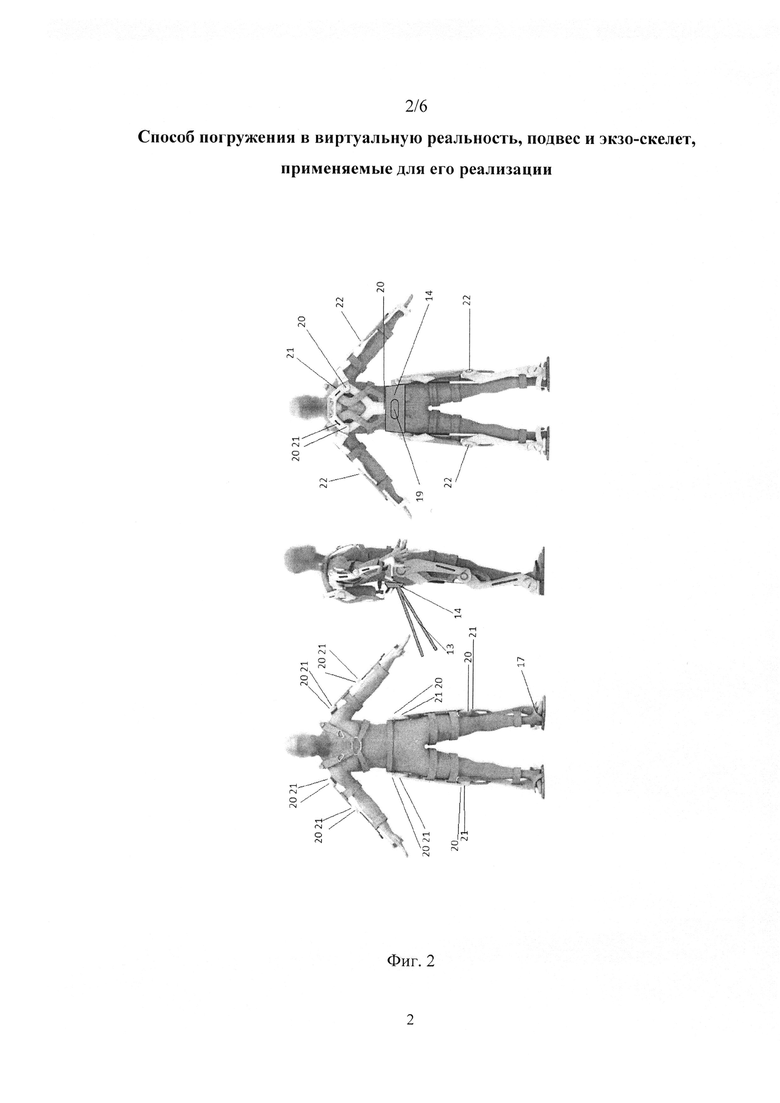
На Фиг. 2 показан общий вид экзо-скелета, с облаченным в него пользователем
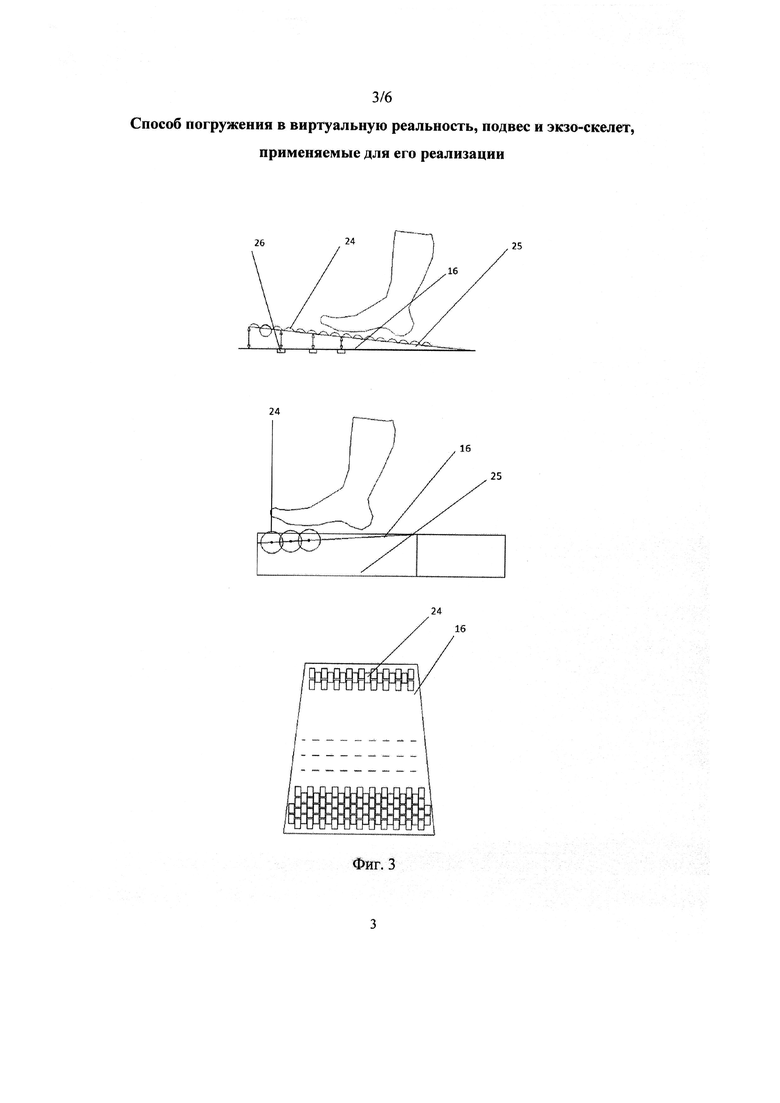
На Фиг. 3 показаны варианты исполнения подвижной дорожки.
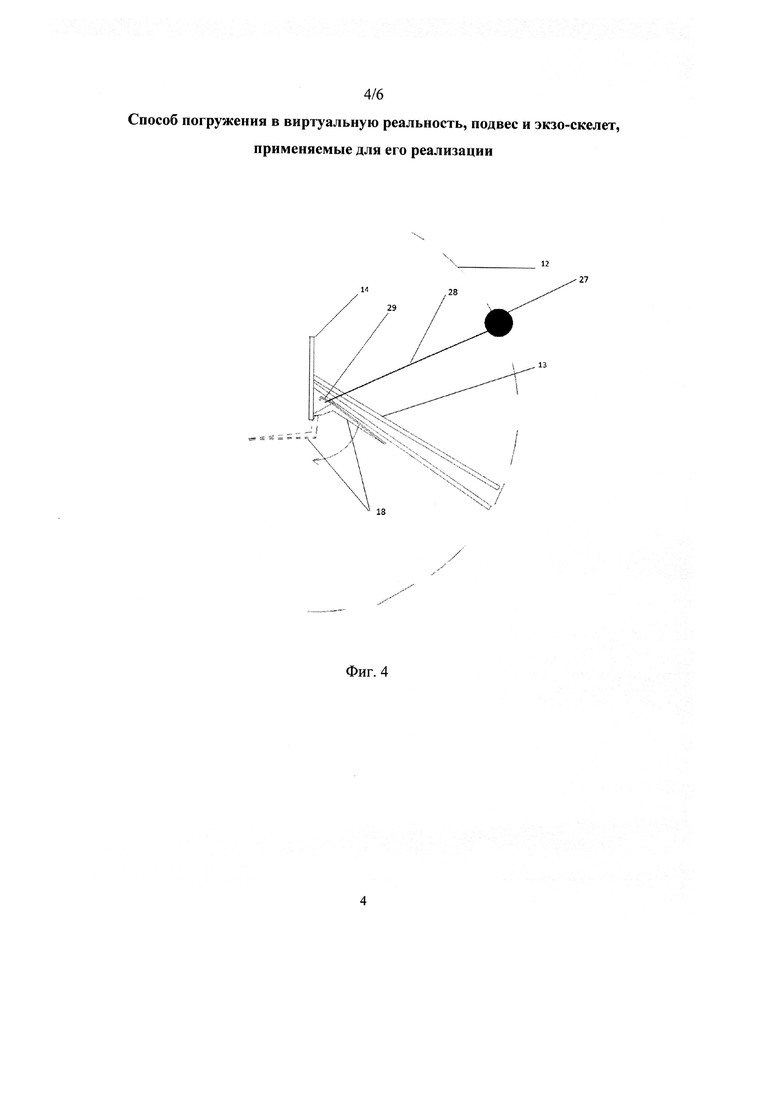
На Фиг. 4 показаны варианты положения сидения.
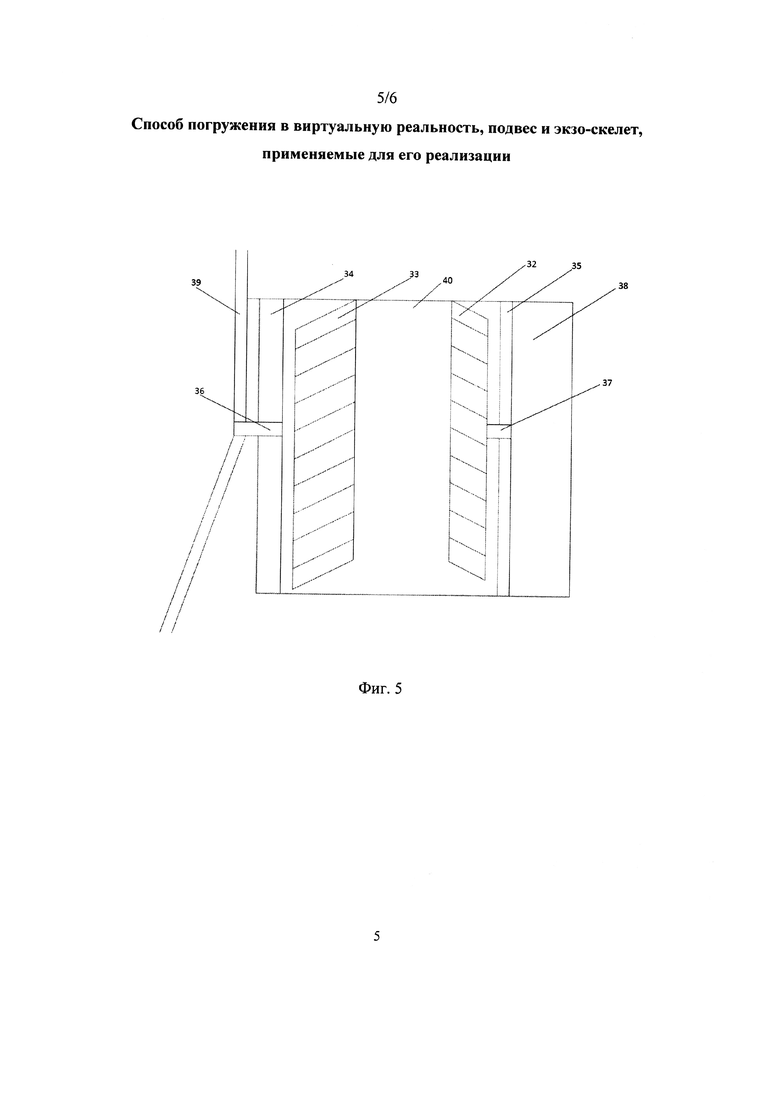
На Фиг. 5 условно изображен блок обратного давления.
На Фиг. 6 показана схема работы центрального блока управления.
Способ погружения в виртуальную реальность включает по меньшей мере частичное облачение пользователя 1 в экзо-скелет 2 (Фиг. 1, 2), закрепление экзо-скелета 2 (Фиг. 2) в подвесе 3, подключение экзо-скелета 2 и подвеса 3 к центральному блоку 4 управления (ЦБУ), загрузку в ЦБУ 4 параметров виртуальной реальности, передачу на визуальный аппарат (на чертеже не показано) экзо-скелета 2 изображений виртуальной реальности, считывание и распознавание изменения положения конечностей экзо-скелета 2, транслирование полученных данных об изменении положения конечностей экзо-скелета 2 в виртуальную реальность, присвоение действий экзо-скелета 2 персонажу виртуальной реальности. При этом в случае образования преграды на пути персонажа, передают стопорные сигналы на конечности экзо-скелета 2. После загрузки в ЦБУ 4 параметров виртуальной реальности сравнивают параметры окружающей среды пользователя с параметрами окружающей среды виртуальной реальности, доводят параметры окружающей среды пользователя до параметров окружающей среды виртуальной реальности, отслеживают и выравнивают параметры окружающей среды с изменениями параметров окружающей среды виртуальной реальности в процессе погружения в нее. При этом для ширины восприятия ускорения перемещения персонажа, подключаются вентиляторы 5. При этом для передачи изменения ускорения перемещения или в случае перемещения персонажа в относительной системе координат виртуальной реальности, на подвес 3 передают сигналы линейного смещения экзо-скелета 2 в пространстве по меньшей мере по одной координате, а в случае взаимодействия персонажа с другим объектом виртуальной реальности, оказывающим на него силовое воздействие, на экзо-скелет 2 передают сигналы обратного давления.
Подвес 3 для погружения в виртуальную реальность включает основание 6, на котором закреплены три несущих рамы 7, 8, 9, соединенные между собой в двух своих вершинах и выполненные с возможностью вращения в разных относительно друг друга плоскостях, закрепленных на двух стойках 10 и 11, имеющих возможность движения как минимум в одной из плоскостей, и выполненный с возможностью подключения к ЦБУ 4, на внутренней раме 7 образована система 12 для расположения крепления 13 для фиксации экзо-скелета 2 в ней.
Крепление 13 экзо-скелета 2 расположено во внутренней раме 7 таким образом, чтобы обеспечивать его фиксацию за поясничную область 14. Так как Дополнительно имеется система 15 климат контроля, установленная с возможностью комплексного воздействия на экзо-скелет 2, и дорожка 16 (Фиг. 3), установленная с возможностью взаимодействия со ступнями 17 экзо-скелета 2. Основание 6 подвеса 3 снабжено по меньшей мере одним устройством, выполненным с возможностью линейного перемещения экзо-скелета 2 в пространстве.
Система 12 подвеса 3 может быть снабжена сидением 18 (Фиг. 4).
Экзо-скелет 2 для погружения в виртуальную реальность включает визуальный аппарат (на чертеже не показано), выполненный с возможностью демонстрации изображений виртуальной реальности, и двигательный аппарат, снабженный креплением 19, выполненным с возможностью его фиксации в подвесе 3 для погружения в виртуальную реальность, и выполненный с возможностью изменения положения конечностей и поворота головы и туловища.
При этом он оснащен суппортные блоками 20, расположенными в узловых точках 21 крепления его элементов.
Упомянутое крепление 19 расположено на поясничной области 14. В узловых точках 21 крепления его конечностей дополнительно имеются блоки 22 обратного давления (Фиг. 5). В ступни 17 экзо-скелета 2 встроен вибрационный блок (на чертеже не показано).
В местах бедренной, лучевой, плечевой, берцовой кости предусмотрены пазы (на чертеже не показано), выполненные с возможностью изменять и фиксировать необходимый размер элементов экзо-скелета 2.
Подвес 3 представляет собой карданов подвес - универсальную шарнирную опору, позволяющая закрепленному в ней в экзо-скелете пользователю вращаться одновременно в нескольких плоскостях. Подвес 3 состоит из трех несущих рам (7, 8, 9), разного диаметра и кольцеобразной формы (например в виде окружности или двенадцатигранника и др. геометрических фигур), помещенных друг в друга и установленных на основании с помощью стоек 10 и 11. Каждая рама соединена с последующей в двух противоположных вершинах и выполнена с возможностью свободного вращения в одной из плоскостей. Причем каждая несущая рама может быть выполнена сборно-разборной, т.е. каждое ребро примыкает к последующему с помощью системы крепления. Используемый материал, обычно, алюминий.
Во внутренней раме 7 размещено крепление 14 экзо-скелета 2, сидение 18, подвижная дорожка 16 (всенаправленная дорожка), ЦБУ 4 и система климат контроля 15.
Система климат контроля 15 состоит из системы вентиляторов 5 в количестве как минимум 8 единиц, кондиционера (на чертеже не показано), нагревателя (на чертеже не показано), увлажнителя (на чертеже не показано) воздуха и термо-блока (на чертеже не показано), контролирующего и регулирующего температуру. Передние направленные подвижные вентиляторы 5 обеспечивают имитацию ветра при заданном сценарии и выполнены с возможностью отслеживать положение пользователя. Задние направленные подвижные вентиляторы обеспечивают имитацию ветра при заданном сценарии и выполнены с возможностью отслеживать положение пользователя. Возможно также подключение к внешнему кондиционеру (на чертеже не показано).
Подвижная дорожка 16 (Фиг. 3), снабженная приводом 23, изменяющим угол наклона и нагрузку, обеспечивает всестороннюю имитацию передвижения пользователя без сопротивления, которое может возникнуть от соприкосновение с ровной поверхностью. Все усилия, связанные с особенностью среды передвижения персонажа, проецируются на пользователя 1 через ответственные узлы экзо-скелета 2. Вибрация на ноги, при движении, например на роликах, передается через встроенные в подошву специальной обуви экзо-скелета 2, вибро моторчики на рис. не показаны. Которые начинают вибрировать при получении сигнала с ЦБУ 4, согласно установленному сценарию в виртуальной реальности.
На подвижной дорожке 16 установлены ролики 24, которые могут располагаться в шахматном порядке относительно друг друга и по сторонам, расположенным с небольшим углом от пользователя. Вершины роликов возвышаются над поверхностью самой дорожки 16 не более 1/8, что дает ощущение почти ровной, но подвижной поверхности. Шахматный порядок позволяет регулировать скорость и силу сопротивления вращения роликов 24. Таким образом осуществляется имитация катания на роликах и лыжах. Сопротивление хода роликов 24 обеспечивается винтом 26, регулирующим положение основания 25 дорожки 16 в наклонной плоскости, которое при подъеме усиливает трение роликов 24. Механизм выдвижения дорожки 16 обеспечивает необходимое соприкосновение и взаимодействие ее поверхности и ступней пользователя 1, при этом высота расположения и подъема дорожки 16 зависит от физических параметров пользователя.
Система климат контроля 15 обеспечивает более глубокую связь с виртуальной реальностью. Передача ускорения, либо падения помимо визуальной части дополняется работой направленных вентиляторов 5, которые получают сигнал от основного блока 4 согласно сценарию. В случае необходимости передать погодные условия подключается система увлажнения воздуха (на чертеже не показано), кондиционер (на чертеже не показано), нагреватель (на чертеже не показано), а так же термо-регулятор (на чертеже не показано). Все это создает глубинное ощущение реальности происходящего.
Сидение 18 (Фиг. 4), распложено в спинной части крепежного механизма 13 экзо-скелета 2 и принимает стандартное положение механическим способом, когда пользователь начинает садиться на сидение, либо иную поверхность в виртуальном сценарии. Если данной поверхности не существует, то механизм (на чертеже не показано) фиксации положения сидения 18 разжимается и сидение не принимает стандартное положение. Ноги при посадке на сидение 18 твердо стоят на подвижной дорожке 16. Сидение 18 всегда находится в откинутом положении и не мешает пользователю 1. В положение, при котором пользователь 1 оказывается на сидении18, происходит только при условии, что персонаж пользователя в виртуальной реальности присаживается на сидение или иную поверхность. Блок (на чертеже не показано) управления стопорным механизмом 27 использует команду с ЦБУ 4, который обрабатывает сюжет виртуальной реальности и дает команду стопорному механизму 27, который тянет тросик 28, а следовательно и захват 29. При этом срабатывает механизм откидывания сидения 18, с последующей фиксацией в заданном положении. Если в сценарии нет поверхности, на которую можно было бы присесть, но пользователь 1, а, следовательно, и персонаж, опускается на колени или корточки, стопор 27 не срабатывает и сидение 18 не откидывается.
Стоит отметить, что основным свойством подвеса 3 является то, что если в него закрепить вращающееся тело, то оно будет сохранять направление оси вращения независимо от ориентации самого подвеса. При этом основание 6 может быть выполнено в виде рамы (например, 2,5×3 м) и крепиться к полу с помощью крепежных элементов, например анкеров.
Стойки 10 и 11 могут быть снабжены вертикальным и горизонтальным лифтами (на чертеже не показано) (линейные подвижки) для имитации вертикального движения с небольшим запасом хода. Данная возможность осуществляется двигателями 30 и 31, блок (на чертеже не показано) управления которых, получая сигнал с ЦБУ 4, совершает заданное действие.
К каждой раме (7, 8, 9) установлен сервопривод (на чертеже не показано) с использованием серво двигателя (на чертеже не показано) и понижающего редуктора (на чертеже не показано), по 2 двигателя на раму диаметрально противоположно друг другу. На горизонтальных и вертикальных вершинах установлены датчики наклона, угла поворота и датчики с контрольной схемой силы тока (на рис не показан) для регулирования баланса тока, подаваемой на двигатель, для удержания рамы (7, 8 или 9). Подача питания для двигателей, а так же экзо-скелета 2, климат контроля 15 и ЦБУ 4 находящегося внутри подвеса 3, осуществляется путем применения токосъемных механизмов (на чертеже не показано), размещенных в узлах соединения рам (7, 8 и 9). На вершинах рам (7, 8, 9) могут быть расположены равновесные утяжелители (на рис. не показан). На плоской поверхности (в стойках 10 или 11 предусмотрен вывод блока (на чертеже не показано) питания, штекера (на чертеже не показано) для подключения напряжения.
Крепление 13 экзо-скелета 2, когда все рамы 7, 8, 9 находятся в одной плоскости, расположено параллельно поверхности.
Подвес 3 снабжен сервосистемой (на чертеже не показано), которая соединена с ЦБУ 4, и содержит:
- шаговые и/или серводвигатели (на чертеже не показано), размещенные в противоположных вершинах рам с возможностью управления положением каждой из трех рам и скоростью изменения их положения;
- понижающие редукторы (на чертеже не показано) для компенсации мощности;
- датчики (на чертеже не показано) наклона и угла поворота
- измерительный блок (на чертеже не показано), предназначенный для измерения токового сигнала Iисх. в цепи привода, подаваемого источником питания для привода серводвигателя, с целью определения равновесного положения пользователя;
- ЦБУ 4, обрабатывающий сигналы, исходящие из сценария виртуальной реальности и передающий на блок (на чертеже не показано) управления рамами.
Подвес 3 может быть снабжен страховкой (на чертеже не показано) верхней части экзо-скелета 2
Экзо-скелет 2 в общем виде представляет собой носимое устройство для получения физических нагрузок согласно сценарию виртуальной среды, содержащее визуальный аппарат (на чертеже не показано), выполненный с возможностью демонстрации изображений виртуальной реальности, и двигательную часть в виде костюма, выполненного из упругой гибкой ткани, металлического каркаса, а так же пластиковых декоративных элементов и электронных узлов участвующих в имитации сопротивления. На ткани, которая находится под пластиковой декоративной накладкой (на чертеже не показано), закреплены электромеханические датчики для считывания усилий (на рис не показан), которые прикладывает носитель, и преобразующие в сигнал, который поступает на блок (на чертеже не показано) управления экзо-скелетом 2, от туда в ЦБУ 4, и возвращающиеся на шаговые или серводвигатели (расположенные в суппортных блоках 20 и 22), расположенные в местах сгиба основных суставов пользователя.
Упомянутые датчики давления, применяются для отслеживания усилий осуществляемых пользователем. В большинстве известных моделей, которые созданы для погружения в виртуальную реальность, отсутствует система изменяемых усилий. То есть если пользователь идет прямо или поднимается по лестнице, или плывет, то усилия всегда будут неизменными, на что мозг (вестибулярный аппарат) очень плохо реагирует. Погружение же в систему, где любые предметы виртуальной реальности снабжены физическими данными, имитирующими полноту физических усилий в реальности, позволяет пользователю глубже получить опыт взаимодействия с виртуальной реальностью.
Нахождение пользователя в подвесе 3 без имитации физических нагрузок, включая и те, которые пользователь испытывает при ходьбе, не дадут полного погружения в виртуальную реальность. Использование экзо-скелета 2, создающего обратные усилия является одним из основных факторов взаимодействия пользователя и виртуальной реальности.
Кроме того с помощью заявляемого экзо-скелета 2 в частных случаях возможно частичное восполнение утраченных функций, увеличение силы мышц человека и расширения амплитуды движений за счет внешнего каркаса и приводящих элементов, поскольку экзо-скелет повторяет биомеханику человека для пропорционального увеличения усилий (или сопротивления) при движениях.
Экзо-скелет 2 выполнен с возможностью охвата пользователя 1, и для подачи усилия на пользователя 1 используется сервосистема, содержащая:
- ряд шаговых серводвигателей работающих с суппортным механизмом 20, выполненных и установленных с возможностью создания сопротивления в подвижных частях 21 экзо-скелета 2, отвечающих за движение рук, ног, спины: суппорт спины (20), отвечающий за движение руки и имитации препятствия по оси X, Y, суппорт плечевой (20), отвечающий за движение руки и имитации препятствия по оси Z, суппорт локтевой с системой обратной тяги (20, 22) (для имитации нажима на руку), суппорт коленный (20, 22) с системой обратной тяги (для имитации давления на ноги), суппорт бедренный (20), отвечающий за движение ноги и имитации препятствия по оси Y, суппорт поясничный (20), отвечающий за движение ноги и имитации препятствия по оси Х; суппорт спинной (20-1), отвечающий за наклоны Х и Y.
- измерительный блок (на чертеже не показано), предназначенный для измерения давления, подаваемого на ответственные внутренние части экзо-скелета 2, и включающий датчик давления и положения голени и икры, датчик давления и положения бедра, датчик давления и положения предплечья, датчик (на чертеже не показано) положения ступни;
- контроллер (на чертеже не показано), анализирующий сигнал с датчика (на чертеже не показано) давления, и подающий команду на шаговый двигатель (на чертеже не показано) для ослабления или усиления действия суппорта 20;
- датчики давления, датчики положения, (на рис не видно)
Крепление экзо-скелета 2 внутри подвеса 3 осуществляется жестким захватом в области поясничного отдела 14.
Суппортные блоки 20, расположенные в узловых креплениях 21 экзо-скелета 2, представляют собой суппортные механизмы, работающие по принципу оказания двустороннего давления на основной (несущий) диск (на чертеже не показано) с целью усложнения (препятствования) движения. Сам поворот всего тела осуществляется путем отслеживания положений стопы, на которой расположены датчики (на рис не показано) и прогнозирования намерения пользователя.
Экзо-скелет 2 имеет возможность адаптироваться по размеру под физические параметры пользователя 1. Для изменения размера экзо-скелета 2 в местах бедренной, лучевой, плечевой, берцовой кости, предусмотрен паз (на чертеже не показано) который дает возможность изменять и фиксировать необходимый размер.
Блоки 22 обратного давления (блоки передачи давления от взаимодействия с подвижными «элементами» виртуальной реальности) работают по принципу передачи кинетической энергии. Каждый блок (Фиг. 5) состоит из подающей лопасти 32, принимающей лопасти 33, сальников 34 и 35, вала второй лопасти 36, передающий усилие на ответственные части экзо-скелета, вала двигателя 37, передающий момент на первую лопасть 32, двигателя 38, ответственной части экзо-скелета 39, на которую передается усилие, сочлененной части экзо-скелета., жидкости (масло) 40, которая вращаясь в заданном направлении передает момент на вторую лопасть 36.
Таким образом, в случае, когда происходит взаимодействие с виртуальной реальностью, в сюжете которого происходит соприкосновение с элементами, оказывающими давление на персонажа подключается данный узел 22, в котором с помощью вращения лопастей 32 и 33 двигателем 38 в определенном направлении передается усилие. Датчик давления (на чертеже не показан) в ответственной части 39 экзоскелета 2 передает информацию на центральный блок управления о параметрах. Центральный блок управления, сверяя полученные параметры с требуемыми, передает команду на блок управления экзо-скелетом о последующим понижением или увеличением оборотов двигателя 38 обратного блока давления.
Крепление экзо-скелета 2 представляет собой систему направленных пружинных блоков для горизонтальной и вертикальной амортизации.
Регулятор блока крепления с выдвижным механизмом(на рис не показан) представляет собой телескопическую систему, которая фиксируется механически при обеспечении соприкосновения стоп 17 экзо-скелета 2 или пользователя 1 с поверхностью дорожки 16.
Каждый нательный блок суппортных механизмов размещен в чаше, диаметр и глубина которой зависит от расположения и необходимого усилия. Блок суппорта состоит из: чаши с основанием, на котором, внутри, размещена жесткая неподвижная прокладка изготовленная из (пластика, резины, полиэтилена) толщиной до 6 мм, на нее накладывается подвижный диск, (на рис нет) который отвечает за движение голени, на нем так же расположена жесткая прокладка из (пластика, резины, полиэтилена), соединенная с диском оказывающим давление. Таким образом диск, осуществляющий ход голени находится между двумя независимыми дисками с плотной поверхностью из (пластика, резины, полиэтилена). Давление осуществляется посредством серво двигателя, который расположен над ними. Вал двигателя, который представляет собой стержень с резьбой, упирается в неподвижную рейку внутри чаши и в момент, когда необходимо осуществить имитацию усилия, двигатель дает необходимое количество оборотов. При этом шаг двигателя равен 1.8 гр. что позволяет очень четко контролировать усилие дисков на суппорт. Таким образом, двигатель вжимает верхний суппорт, а подвижный диск, оказавшийся между двух жестких поверхностей получает необходимое сопротивление. Данное сопротивление считывается датчиками давления той части, на которое приложено давление, в данном случае - голени.
В экзо-скелете 2 расположены следующие блоки суппортов 20: блок колена, блок бедра продольный, блок бедра поперечный (расположен чуть выше продольного, на спине), блок локтевой, два блока ключицы. Также предусмотрена конструкция (на чертеже не показано) регулирующая наклон, являющаяся страховочной, которая располагается между лопаток, на спине и подается через крепления внутри третьего кольца.
Конструкция креплений 13 для экзо-скелета 2, а так же возможные противовесы (на рис не показаны), размещенные на внутренней раме 7, позволяют разместить дополнительные электромеханические элементы, которые в свою очередь будут способствовать большей имитацией реальных ощущений.
По всей поверхности экзо-скелета 2 могут быть расположены элементы, выполненные с возможностью изменения температуры области вокруг них (на рис не показаны).
Экзо-скелет 2 может быть выполнен сборно-разборным, в том числе, со съемной обувью, что позволяет менять размер обуви для каждого пользователя.
Пульт (на чертеже не показано) управления представляет собой полуперчатку, только для одной руки. Кнопки управления расположены ближе к запястью. Данное решение вызвано необходимостью оградить пользователя от случайных нажатий. То есть до кнопки придется чуть тянуться пальцами, сжимая кисть в кулак. Количество кнопок- 4 (A, B, C, D - вперед назад, вправо влево) сила нажатия определяет скорость вращения.
Работа кнопок в разных режимах:
1 - Если позиция пользователя 1 в ВР на «поверхности» то, например такое движение, как колесо осуществляется за счет нажатия кнопки А или D в зависимости от того в какую сторону происходит движение. При этом за счет отслеживания положения вершин, кольцо доводит оборот до 180 гр. Для того что бы совершить данный оборот необходимо держать кнопку нажатой. Сила нажатия в данном случае не влияет на скорость, а скорость является постоянной и меняется только в настройках основной программы имитации.
2 - Кувырок вперед и назад осуществляется по такому же принципу только с использованием кнопок B и C. При этом довод поворота в кувырке только прямо или только назад так же исходит из 180 гр.
3 - В случае если программа игры или имитации видит, что пользователь в виртуальной реальности находится не на поверхности (летит) то работа кнопок будет несколько иная, а именно: При нажатии на кнопку А или D, пользователь будет совершать наклон в право или лево лишь тогда, когда кнопка нажата. При этом важна будет и сила нажатия, так как она будет задавать скорость. Начальная скорость вращения в полете так же задается начальными основными настройками на ПК. То же самое касается и поведения пользователя при имитации плавания.
4 - Вращение вперед назад и его динамика осуществляется по принципу, описанному в предыдущем пункте.
Таким образом, с помощью экзо-скелета 2 внутри подвеса 3 можно имитировать следующие естественные движения: ходьба, бег, катание на роликовых коньках, лыжах, скейтборде, прыжки в высоту и длину. Более сложные и непривычные: плавание, подтягивание, колесо, вращение, кувырок, сальто, полет птицы, полет на дельтаплане, прыжок с парашютом, вингсьют (костюм белки летяги).
Если поместить пользователя 1 внутрь подвеса 3 без экзо-скелета 2, оснащенного обратной физической отдачей, то действия внутри виртуальной реальности совершаться смогут, но появится ощущение дискомфорта, так как мозг будет стараться цепляться за привычные ощущения, которых в данном случае не будет. Это и ожидание усилий, и веса предметов, и других особенностей задуманных разработчиками игр или имитаций.
Сам же по себе экзо-скелет 2 с обратной физической отдачей имеет место существовать, Но удобство его использования вне подвеса 3 сомнительно. Если использовать данное устройство в других предложенных моделях позволяющих получить опыт в виртуальной реальности, то оно способно имитировать физические усилия, применяемые в виртуальной реальности, но лишь ограниченно. Только совокупность двух устройств дает максимальный эффект к тем ощущениям, о которых ранее можно было и не мечтать. Например, «вингсьют». Положение тела горизонтально, повороты в воздухе при полете контролируются усилиями рук, и эти усилия ощущаемы. При раскрытии парашюта создается имитация подтряхивания, программа сама определяет ваше геометрическое положение в пространстве, а руками вы создаете натяжение строп. Данные ощущения невозможно получить, если не использовать оба устройства одновременно.
На Фиг. 6 показана схема работы центрального блока управления (ЦБУ).
1 - После загрузки в ЦБУ параметров окружающей среды виртуальной реальности, происходит сравнение данных с параметрами окружающей среды пользователя, поступающих с блока климат контроля. Данные анализируются и поступают обратно в виде команды с уточнением параметров для системы кондиционера, увлажнителя, нагревателя и вентилятора.
2 - В ходе взаимодействия с виртуальной реальностью, блок управления рамой передает параметры, на ЦБУ с датчиков наклона, угла поворота и силы тока. ЦБУ сравнивая полученные результаты со сценарием виртуальной реальности посылает обратно команду которая с блока управления рамой передается на двигатели первой второй и третьей рамы соответственно.
3 - Блок управления экзо-скелетом получает команду с ЦБУ согласно сценарию игры и приводит в действие суппорт или двигатель обратного усилия. При этом подается обратный сигнал на ЦБУ с данными датчиков давления и положения.
4 - Блок управления сидением получает команду с ЦБУ 4 и при необходимой команде зажимает стопорный механизм, в следствии чего откидывается сидение.
5 - В случаях, когда сценарием событий виртуальной реальности подразумеваются ускорения, то на блок управления линейным ускорением поступает команда, которая подает сигнал на двигатели стоек либо продольные двигатели.
6 - ЦБУ, при условиях заданным сценарием ВР передает сигнал на блок управления дорожкой, который ее приводит в рабочее положение. Зная количество оборотов регулировочного болта (26) ЦБУ получает данные о параметрах угла наклона дорожки и передает обратно команду на блок управления дорожкой с целью достижения необходимых значений.
Помимо игровых имитаций, выделяется еще ряд областей, где может применяться данное устройство: тренировки, акробатика, репетиции, спорт в целом, помощь в реабилитации инвалидов, медицина и прочее.
Таким образом, разработан способ, реализующие его подвес 3 и экзо-скелет 2, которые предоставляют пользователю полную свободу действий внутри виртуальной реальности, при этом обеспечивает данного индивида физическими нагрузками, которые свойственны в реальности, а также климатическими ощущениями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беговой тренажер с интерфейсом виртуальной реальности | 2023 |
|
RU2813000C1 |
| БЕГОВОЙ ТРЕНАЖЁР С СИСТЕМОЙ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ И СПОСОБ ЕГО РАБОТЫ | 2019 |
|
RU2696754C1 |
| Способ подготовки парашютистов и устройство его реализующее | 2019 |
|
RU2730759C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ЗАХВАТА ДВИЖЕНИЙ И ПОЛОЖЕНИЯ ТЕЛА ЧЕЛОВЕКА И ЧАСТЕЙ ТЕЛА ЧЕЛОВЕКА | 2017 |
|
RU2662399C1 |
| Всенаправленная дорожка для виртуальной реальности | 2022 |
|
RU2784682C1 |
| Способ подготовки парашютистов на тренажере воздушно-десантной подготовки и устройство его реализующее | 2021 |
|
RU2769481C1 |
| Способ подготовки парашютистов на тренажере воздушно-десантной подготовки | 2024 |
|
RU2832446C1 |
| Устройство имитации прыжка с парашютом | 2023 |
|
RU2808184C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ВИРТУАЛЬНЫМ ОБЪЕКТОМ | 2017 |
|
RU2670351C1 |
| Способ реабилитации двигательных нарушений | 2017 |
|
RU2645604C1 |


Способ погружения в виртуальную реальность, подвес и экзо-скелет, применяемые для его реализации. Техническим результатом является расширение арсенала технических средств, обеспечивающих погружение в виртуальную реальность. Способ включает частичное облачение пользователя в экзо-скелет, закрепление экзо-скелета в подвесе, подключение экзо-скелета и подвеса к центральному блоку управления, загрузку в центральный блок управления параметров виртуальной реальности, передачу на визуальный аппарат экзо-скелета изображений виртуальной реальности, считывание и распознавание изменения положения конечностей экзо-скелета, транслирование полученных данных об изменении положения конечностей экзо-скелета в виртуальную реальность, присвоение действий экзо-скелета персонажу виртуальной реальности, при этом в случае образования преграды на пути персонажа, передают стопорные сигналы на конечности экзо-скелета, крепление экзо-скелета расположено в раме таким образом, чтобы обеспечивать его фиксацию за поясничную область, дополнительно имеется система климат контроля, и подвижная дорожка, основание подвеса снабжено устройством, выполненным с возможностью линейного перемещения экзо-скелета в пространстве. 3 н. и 2 з.п. ф-лы, 6 ил.
1. Способ погружения в виртуальную реальность включает по меньшей мере частичное облачение пользователя в экзо-скелет, закрепление экзо-скелета в подвесе, подключение экзо-скелета и подвеса к центральному блоку управления, загрузку в центральный блок управления параметров виртуальной реальности, передачу на визуальный аппарат экзо-скелета изображений виртуальной реальности, считывание и распознавание изменения положения конечностей экзо-скелета, транслирование полученных данных об изменении положения конечностей экзо-скелета в виртуальную реальность, присвоение действий экзо-скелета персонажу виртуальной реальности, при этом в случае образования преграды на пути персонажа передают стопорные сигналы на конечности экзо-скелета, отличающийся тем, что после загрузки в центральный блок управления параметров виртуальной реальности сравнивают параметры окружающей среды пользователя с параметрами окружающей среды виртуальной реальности, доводят параметры окружающей среды пользователя до параметров окружающей среды виртуальной реальности, отслеживают и выравнивают параметры окружающей среды с изменениями параметров окружающей среды виртуальной реальности в процессе погружения в нее, при этом для передачи изменения ускорения перемещения или в случае перемещения персонажа в относительной системе координат виртуальной реальности, на подвес передают сигналы линейного смещения экзо-скелета в пространстве по меньшей мере по одной координате, а в случае взаимодействия персонажа с другим объектом виртуальной реальности, оказывающим на него силовое воздействие, на экзо-скелет передают сигналы обратного давления.
2. Подвес для погружения в виртуальную реальность, включающий основание, на котором закреплены три несущих рамы, соединенные между собой в двух своих вершинах и выполненные с возможностью вращения в разных относительно друг друга плоскостях, закреплённых на двух стойках, имеющих возможность движения как минимум в одной из плоскостей, и выполненный с возможностью подключения к центральному блоку управления, на внутренней раме образовано крепление для фиксации экзо-скелета в ней, отличающийся тем, что крепление экзо-скелета расположено в раме таким образом, чтобы обеспечивать его фиксацию за поясничную область, дополнительно имеется система климат-контроля, установленная с возможностью комплексного воздействия на экзо-скелет, и подвижная дорожка, установленная с возможностью взаимодействия со ступнями экзо-скелета, основание подвеса снабжено по меньшей мере одним устройством, выполненным с возможностью линейного перемещения экзо-скелета в пространстве.
3. Подвес по п.2, отличающийся тем, что внутренняя рама снабжена сидением.
4. Экзо-скелет для погружения в виртуальную реальность, включающий визуальный аппарат, выполненный с возможностью демонстрации изображений виртуальной реальности, и двигательный аппарат, снабженный креплением, выполненным с возможностью его фиксации в подвесе для погружения в виртуальную реальность, и выполненный с возможностью изменения положения конечностей и поворота головы и туловища, при этом он оснащен стопорными блоками, расположенными в узловых точках крепления его элементов, отличающийся тем, что упомянутое крепление расположено на поясничной области, в узловых точках крепления конечностей дополнительно имеются блоки обратного давления, а в ступни встроен вибрационный блок.
5. Экзо-скелет по п. 4, отличающийся тем, что в местах бедренной, лучевой, плечевой, берцовой кости предусмотрены пазы, выполненные с возможностью изменять и фиксировать необходимый размер его элементов.
| WO2015002850 A1, 08.01.2015 | |||
| US5961541 A, 05.10.1999 | |||
| US5963891 A, 05.10.1999 | |||
| RU2013139172 A, 10.03.2015. |

