Изобретение относится к области воздушно-десантной подготовки личного состава и может быть использовано в тренажерах для подготовки парашютистов.
Известны требования к воздушно-десантной подготовке [7] и состав парашютных систем [8, 9] для ее выполнения и совершения прыжков в атмосфере Земли. В состав парашютной системы входят ранец с системой подвесной, купола основного и запасного парашютов со стропами управления заканчивающиеся звеньями управления, звенья ручного раскрытия парашютов (основного и запасного), устройство рифления, свободные концы с закрепленными на них в карманах (зачекованными) звеньями управления, полуавтомат парашютный комбинированный унифицированный [8].
Каждый из свободных концов (левый и правый) разветвляется на передний и задний.
К верхней части свободных концов посредством звеньев креплений строп подсоединяются стропы парашюта. На каждом заднем свободном конце пришито направляющее кольцо стропы управления, верхняя и нижняя шлевки фиксации чек звена управления.
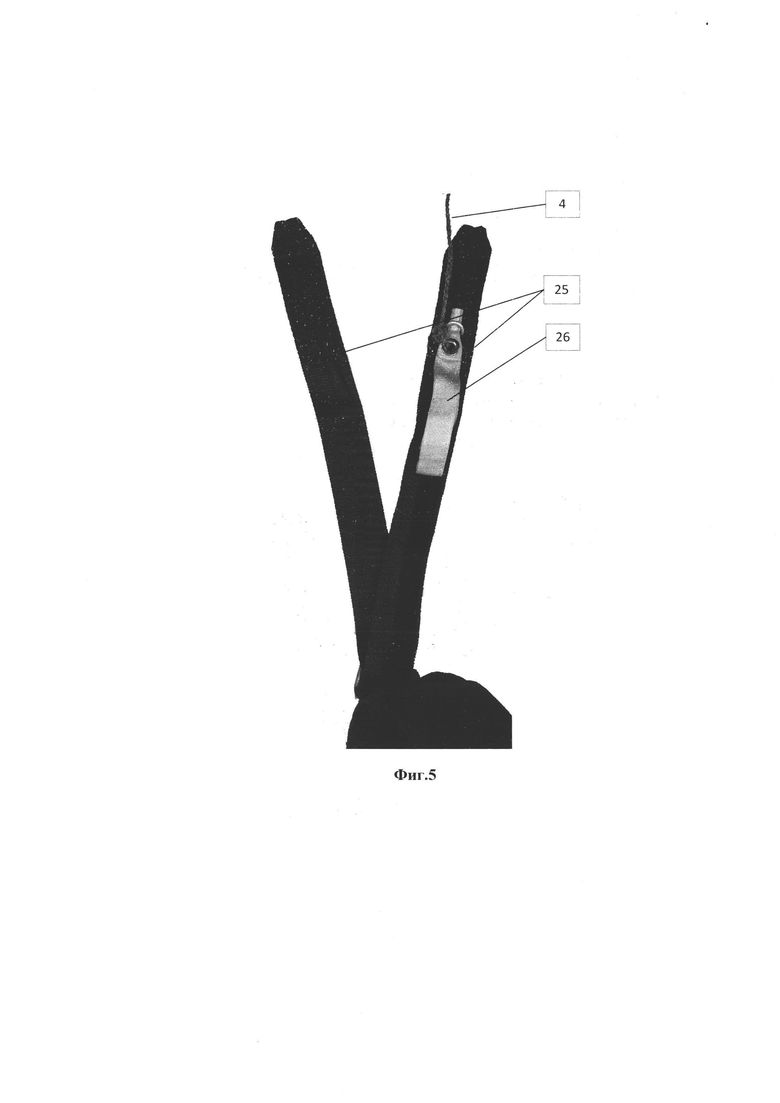
Звенья управления предназначены для удобства действий стропами управления и представляют собой петлю, изготовленную из ленты TYPE-4 (спецификация MIL-W-5038). В верхней части петли имеется люверс для крепления стропы управления и чека зачековки стропы управления в шлевки фиксации свободных концов.
Зачекованные звенья управления в шлевки фиксации на свободных концах приведены на фиг. 5.
Разворот парашютиста в воздухе достигается либо с помощью строп управления, либо натяжением свободных концов подвесной системы [7].
Нормативные документы, такие как руководство по воздушно-десантной подготовке и инструкция по эксплуатации системы парашютной регулирует порядок выполнения действий, включая и маневрирование, при выполнении прыжков с парашютом [7, 8].
Для разворота вправо методом воздействия на стропы управления надо взяться правой рукой, за правое звено управления стропами и потянуть за него вниз до груди или колена, в зависимости от необходимой степени вращения.
Разворот влево выполняется таким же образом, только воздействие производится левой рукой, за левое звено управления стропами.
Для разворота парашютной системы производится втягиванием строп управления или натяжением одного из свободных концов. Разворот вправо производится втягиванием правой стропы управления или натяжением одного из правых свободных концов (переднего или заднего). Разворот влево производится втягиванием левой стропы управления или натяжением одного из левых свободных концов (переднего или заднего).
В содержание всех занятий по воздушно-десантной подготовке обязательно включается отработка действий десантников-парашютистов в воздухе после раскрытия парашюта (включая управление парашютом), правила применения запасного парашюта и приземления.
Известен способ подготовки парашютистов в аэродинамической трубе и устройства его реализующее [1, 2].
Способ заключается в том, что парашютисты помешаются в аэродинамическую трубу, содержащую рабочие зоны с различными параметрами воздушного потока. При этом парашютисты имеют возможность отрабатывать действия по управлению своим телом во время прыжка.
Недостатком данного способа является то, что он дает возможность отработки лишь отдельных элементов десантирования, нет возможности отработки, во-первых, выхода парашютиста из летательного аппарата и его приземления, во-вторых не обеспечивается отработка управления куполом во время выполнения прыжка.
Известен способ подготовки парашютистов на тренажере использующим части конструкции летательного аппарата и подвесные системы парашютов, а также устройства, его реализующие [3, 4]. Способ заключается в том, что по команде парашютисты (десантники) подходят к двери в имитируемой части фюзеляжа летательного аппарата (самолета или вертолета) и поочередно покидают фюзеляж через дверь, далее закрепленный на тросе манипулятора (крана или система полозьев) парашют с подвесной системой позволяют парашютисту (десантнику) тренироваться в принятии правильного положения тела и конечностей для использования парашютов (основного и запасного), отрабатывать их раскрытие и приземление. Для усиления психосоматического воздействия на парашютиста ему на голову могут одевать шлем с жидкокристаллическими индикаторами для создания виртуального пространства.
Недостатком данного способа является то, что он во-первых обеспечивает привитие ложных навыков и ощущений, за счет того, что распределение нагрузки и сил, возникающих при раскрытии парашюта реализованных данным способом не соответствуют реальному воздействию на парашютиста при совершении прыжка, во-вторых не обеспечивает возможность формирования необходимых навыков, связанных с гашением скорости полета парашютиста перед приземлением.
Известен способ подготовки парашютистов на тренажере моделирующим направление динамических нагрузок, а также устройства его реализующие [5]. Способ заключается в том, что тренируемый (обучаемый) парашютист занимает свое место в тренажере в сиденье на валу и фиксируется в сидении подвесной системой с макетом парашюта, тренажер приводится во вращение в горизонтальной плоскости относительно поверхности Земли, после раскрытия парашюта начинается торможение, скорость вращения гасится до промежуточного значения, а потом вплоть до полной остановки. Для отработки отказа парашюта, применяют вращение сидения подвесной системой в плоскости находящейся под углом к поверхности Земли и в той же плоскости, в которой находится вал с сидением, с закрепленным парашютистом. При этом скорость вращения после раскрытия парашюта снижается до промежуточного значения, а вал с сиденьем вращается вокруг своей оси со стабильной скоростью.
Недостатком данного способа является то, что он обеспечивает привитие ложных навыков и ощущений, за счет того, что не обеспечивает возможность формирования необходимых связанных навыков выхода парашютиста из летательного аппарата, отработки управления куполом во время выполнения прыжка, гашением парашюта после приземления, а также навыка поведения парашютиста при воздействии ветровых потоков, идентичных естественным воздействиям атмосферы Земли.
Наиболее близким к заявляемому способу, то есть прототипом, является способ подготовки парашютистов и устройство его реализующее [6].
Способ заключается в том, что тренируемый (обучаемый) парашютист занимает свое место в подвесной системе парашюта, закрепленной на раме тренажера, на голову одевают очки виртуальной реальности.
Программное обеспечение на основе 3D-симуляции создает виртуальное пространство, с учетом физических параметров и динамики парашютного спуска и различных параметров окружающей среды (типов парашютных систем, времени суток, погодных условий, рельефа местности, высоты и скорости полета).
После покидания тренируемого (обучаемого) парашютиста имитируемого летательного аппарата для выполнения прыжка происходит обдув воздухом и функциональным устройством обеспечивается изменение направлений и свобод перемещения тела тренируемого (обучаемого) парашютиста в пространстве идентичное перемещениям тела при свободном падении и раскрытии парашюта.
Для изменения направлений вращения и свободы перемещения тела тренируемого (обучаемого) парашютиста при свободном падении и при раскрытии парашюта, обучаемый закрепляется в устройстве фиксации спины (также называемое «спинной захват»), являющемся частью подвесной системы и для имитации состояния невесомости и замены силы встречного потока воздуха воздействующего при выполнении реального прыжка на парашютиста при свободном падении путем опрокидывания тела тренируемого (обучаемого) парашютиста «на спину» тела тренируемого (обучаемого) парашютиста в плоскость параллельную плоскости поверхности Земли, а для имитации раскрытия парашюта и для дальнейшего управления им тело тренируемого (обучаемого) парашютиста в спинном захвате перемещается в плоскость перпендикулярную плоскости поверхности Земли.
Для имитации свободного полета тренируемый (обучаемый), вначале наклоняется вперед рамой с противовесами, как при реальном прыжке, а затем запрокидывается на спину, при этом используется сила гравитации которая отклоняет все конечности тренируемого назад, создавая у него ощущение полета во встречном потоке воздуха с большой скоростью, и в дополнение он обдувается потоком воздуха для имитации ощущения воздействия воздушного потока на одежду и кожу лица, как и при реальном прыжке, при этом Земля в виртуальном пространстве поворачивается таким образом, что (обучаемый) получает ощущения идентичные возникающим при реальном прыжке с парашютом.
Используя датчики, фиксирующие воздействия, совершаемые тренируемым (обучаемым) парашютистом на элементы подвесной системы парашюта, программное обеспечение формирует изменение виртуального пространства и положения тела тренируемого (обучаемого) парашютиста закрепленного в устройстве фиксации спины по крену, моделируя движения парашютиста в воздушной среде от момента покидания летательного аппарата (далее ЛА) до приземления.
Динамика касания, тренируемого (обучаемого) парашютиста поверхности Земли имитируется за счет физического касания и перемещения по движущемуся полотну дорожки в момент, скоординированный по времени с демонстрирующимся в жидкокристаллических индикаторах виртуальными изображениями в одетом на голову шлеме тренируемого (обучаемого) парашютиста.
Недостатком данного способа является то, что он обеспечивает привитие ложных навыков и ощущений, за счет того, что не обеспечивает возможность формирования необходимых связанных навыков и действий после открытия основного парашюта (введение в работу средств управления парашютом в виде свободных концов с зачекованными на них звеньями управления с их дальнейшей расчековкой), поведения парашютиста при управлении планирующей парашютной системой во время выполнения прыжка (увеличение горизонтальной составляющей скорости планирующих парашютных систем, совершение регламентных действий в нештатных ситуациях).
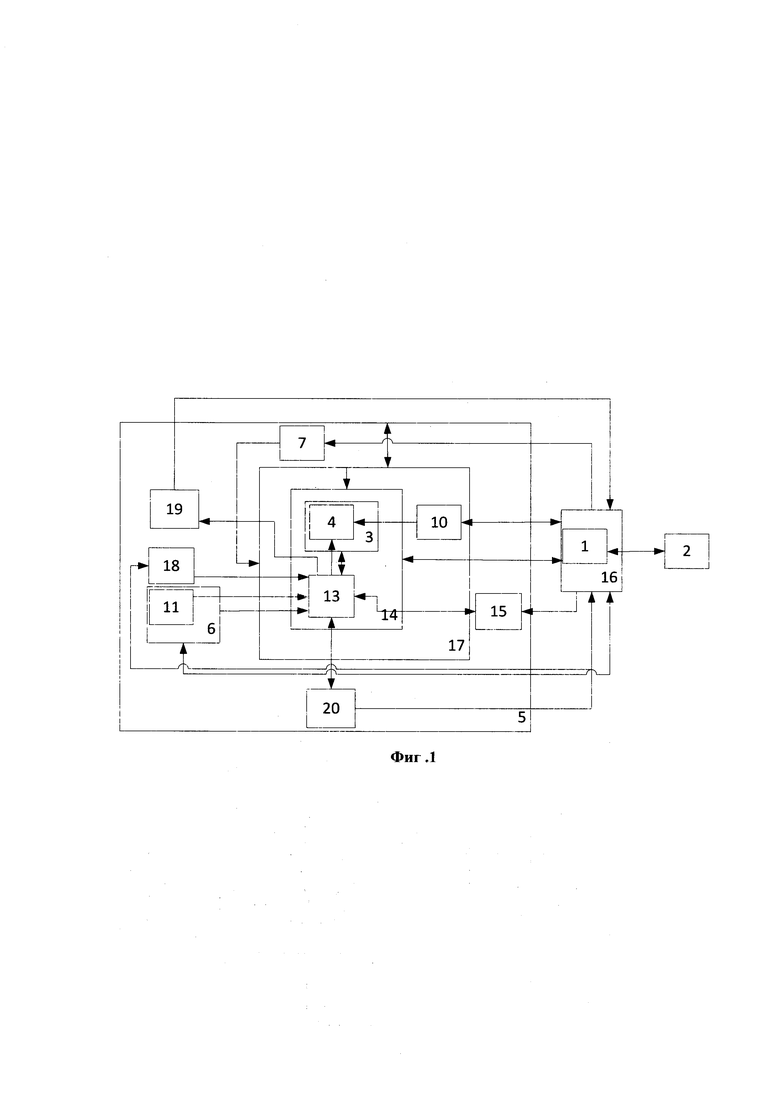
На фиг. 1 представлена схема устройства, реализующего способ прототип.
Устройство, для реализации способа прототипа, состоит из связанных между собой жестко закрепленной на Земле рамы тренажера (5) с электроприводами (7) в виде фермы равнопрофильного сечения с постаментом, содержащем регулируемую движущуюся дорожку (15), рабочего места инструктора (преподавателя) (2), ранца подвесной системой (3) парашюта, содержащей стропы управления (4), электропривода сматывания (разматывания) строп управления (.10), электроприводов (7), тренируемого (обучаемого) (13), очков виртуальной реальности (6) со встроенными аудионаушниками (11), находящиеся на голове тренируемого (обучаемого) (13) и связанного с управляющим компьютером (1), фиксации спины тренируемого (обучаемого) с приводом его вращения (14), постамента содержащего регулируемую движущуюся дорожку (15), рамы с противовесами (17) с закрепленным на ней устройством фиксации спины тренируемого (обучаемого) с приводом его вращения (14), шкафа управления (16) содержащего в частности управляющий компьютер (1), генераторов воздушного потока (18), закрепленных на раме тренажера с противовесами (17), датчиков определяющих положение рук, ног, головы, тела тренируемого (обучаемого) (20), закрепленные, на одежде тренируемого (обучаемого) (13), манипулятор (19), располагаемый в руке тренируемого (обучаемого).
Противовесы рамы с противовесами (17) реализованы в виде генераторов воздушного потока (18). Регулируемая движущуюся дорожку (15) регулируется по высоте.
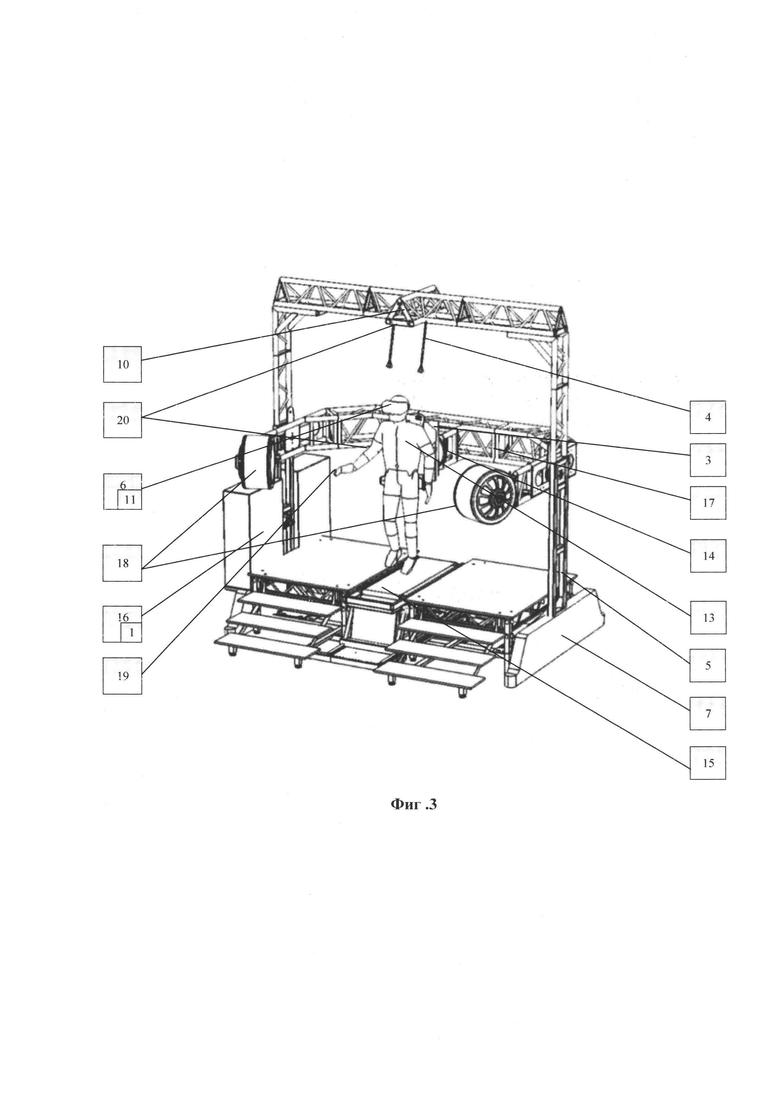
Внешний вид тренажера подготовки парашютистов представлен на фиг. 3. Работа по данному способу осуществляется следующим образом.
Тренируемый (обучаемый) (13), помещается в устройстве фиксации спины тренируемого (обучаемого) с приводом его вращения (14) и ранца подвесной системой (3) парашюта, содержащей стропы управления (4), где фиксируется. На голову тренируемому (обучаемому) (20) надевают очки виртуальной реальности (6) со встроенными аудионаушниками (11).
Тренируемый (обучаемый) (13) закрепленный в устройстве фиксации спины тренируемого (обучаемого) с приводом его вращения (14) и ранце подвесной системы (3) парашюта, содержащей стропы управления (4), помещается в раме с противовесом (17),таким образом, что бы касаться ногами регулируемой движущейся дорожки постамента, содержащего регулируемую движущуюся дорожку (15).
Очки виртуальной реальности (6) начинают отображать сформированные управляющим компьютером (1), по команде с рабочего места инструктора (преподавателя) (2) объекты в виртуальном пространстве (летальный аппарат, аппарель, других виртуальных тренируемых, одежду, систему крепления парашюта и т.д.) таким образом, обеспечивается возможность полунатурной имитации выхода из аппарели летательного аппарата.
С рабочего места инструктора (преподавателя) (2) через управляющий компьютер (1) запускается программа, которая осуществляет управление тренажером и осуществляет формирование виртуального пространства. Программное обеспечение тренажера обеспечивает отработку как штатного спуска тренируемого (обучаемого) (13) с парашютом, так и действия в нештатных ситуациях, например, при отказе основного парашюта. Виртуальное пространство формируется управляющим компьютером (1), а образованное виртуальное пространство, в котором тренируемый (обучаемый) (13) видит трехмерное изображение виртуального мира, отображается тренируемому (обучаемому) (13) в очках виртуальной реальности (6), располагаемых на голове тренируемого (обучаемого) (13).
Аудиосопровождение тренировки производится управляющим компьютером (1) через встроенные аудионаушники (11). Аудиосопровождение включает имитацию гула моторов ЛА, звуки ветра, звуки от работы парашютной системы, голос выпускающего, подающего команды тренируемому (обучаемому) (13) «Приготовиться», «Прыжок», «Пошел», «Отставить».
После выхода тренируемого (обучаемого) (13) из имитируемой в виртуальном пространстве аппарели летательного аппарата, по команде из шкафа управления (16), содержащего в частности управляющий компьютер (1), регулируемая движущаяся дорожка постамента отъезжает назад и опускается, электропривод (7), отклоняет раму с противовесами (17), с тренируемым (обучаемым) (13), закрепленным в устройстве фиксации спины тренируемого (обучаемого) с приводом его вращения (14) и с ранцем подвесной системы (3) парашюта, содержащем стропы управления (4). Положение рамы с противовесами (17) изменяется относительно плоскости поверхности Земли, при помощи механизма привода вращения устройства фиксации спины (14), вращает устройство фиксации спины, положение тела тренируемого (обучаемого) (13), в устройстве фиксации спины тренируемого (обучаемого) с приводом его вращения (14) изменяется относительно вертикальной плоскости по отношению к поверхности Земли, изменения положения рук, ног, головы тренируемого считываемые датчиками определяющими, положение рук, ног, головы, тела тренируемого (20), обрабатываются в шкафу управления (16), управляющий компьютер (1), формирует виртуальное пространство с изменениями относительно положения тела тренируемого (обучаемого) (13), в очках виртуальной реальности (6), продолжает отображать виртуальные объекты, таким образом, обеспечивается возможность имитации свободного падения и спуска на парашюте.
Для имитации потока воздуха при реальном прыжке у тренируемого (обучаемого) (13), потоки воздуха формируются генераторами воздушного потока (18) и обдувают тренируемого (обучаемого) (13), потоки воздуха изменяются генераторами воздушного потока (18) по команде шкафа управления (16) в зависимости от данных поступающих от очков виртуальной реальности (6). Дополнительно управляющий компьютер (1) может создавать аудио имитацию ветра и передавать звуки тренируемому (обучаемому) (13) через встроенные аудионаушники (11) в очки виртуальной реальности (6).
Таким образом осуществляется имитация сноса парашютиста, срыва парашюта или свободного падения.
Движения, совершаемые телом, руками или ногами тренируемого (обучаемого) (13) закрепленным в ранце подвесной системы (3) парашюта, содержащей стропы управления (4) в реальном пространстве, фиксируются и измеряются датчиками, определяющими положение рук, ног, головы, тела тренируемого (обучаемого) (20), манипулятором (19) и электроприводом сматывания (разматывания) строп управления (10). Данные от датчиков определяющих положение рук, ног, головы, тела (обучаемого) (13), генераторов воздушного потока (18), манипулятора (19), электропривода сматывания (разматывания) строп управления (10) поступают в управляющий компьютер (1) шкафа управления (16), где обрабатываются совместно с данными о виртуальном пространстве. Управляющий компьютер (1), принимая во внимание массу тела тренируемого (обучаемого) (13), ускорение свободного падения, направление и скорость имитируемого ветра, взаимодействие тренируемого (обучаемого) (13) с объектами в виртуальном пространстве, генерирует изменения в виртуальном пространстве с учетом обработанных данных, например, измененные положения в виртуальном пространстве частей тела тренируемого (обучаемого) (13) или положения облаков, поверхности Земли.
Измененные данные виртуального пространства отображаются тренируемому в очках виртуальной реальности (6), а также выводятся на рабочее место инструктора (преподавателя) (2).
Формирование виртуального пространства с изменениями, связанными с физическими действиями тренируемого (обучаемого) (13), в реальном пространстве и отображением данного пространства тренируемому (обучаемому) (13), обеспечивает возможность имитации и отработки действий по управлению основным или запасным парашютом в процессе снижения и приземления, гашения скорости полета тренируемого (обучаемого) перед приземлением, применения запасного парашюта, применения спецсредств во время десантирования.
Инструктор (преподаватель) на рабочем месте инструктора (преподавателя) (2), основываясь на данных датчиков, определяющих положение рук, ног, головы, тела тренируемого (обучаемого), (13), манипулятора (19), электропривода сматывания (разматывания) строп управления (10), обработанных управляющим компьютером (1) проводит мониторинг и анализ правильности действий тренируемого (обучаемого) (13) после поступления команд выпускающего и во время выполнения прыжка и приземления.
Недостатком устройства является, во-первых, ограниченные возможности обучения пилотирования парашюта с использованием свободных концов, во-вторых отсутствие видео фиксации имитационного прыжка с парашютом и действий тренируемого (обучаемого) при его совершении, в-третьих неадекватность звуковоспроизведения встроенными аудионаушниками очков виртуальной реальности, обусловленная обмусленную сниженным потенциалом звуковой динамики, узким низкочастотным диапазоном, деформацией естественной звуковой сцены,
В основу изобретения положена задача повышения качества обучения парашютистов, за счет, отработки необходимых связанных навыков действий после открытия основного парашюта (введения в работу средств управления парашютом в виде свободных концов с зачарованными на них звеньями управления с их дальнейшей расчековкой), управления планирующей парашютной, системой во время выполнения прыжка (увеличение горизонтальной составляющей скорости планирующих парашютных систем), совершение регламентных действий в нештатных ситуациях при выполнение прыжка с парашютной системой.
Для достижения указанной цели в способ подготовки парашютистов на тренажере воздушно-десантной подготовки, дополнительно вводится введение в работу свободных концов, расчековка звеньев управления, пилотирование парашютной системы, путем прямого воздействия, тренируемого (обучаемого) на ее свободные концы, звенья управления и стропы управления (4) при нештатной работе парашютной системы и особых случаях во время совершения прыжка с парашютом.
Введение в работу свободных концов связанных через штатные средства крепления к ранцу подвесной системы (3), то есть их физическое появление в пространстве в зоне плечевого сустава тренируемого (обучаемого), происходит, как и при реальном прыжке с парашютной системой, в момент времени соответствующий вытягиванию купол парашюта и стропы управления (4).
Для расчековки звеньев управления необходимо вынуть звенья управления из шлевок (кармашков) фиксации на свободных концах.
Для пилотирования парашютной системы, тренируемый (обучаемый) оказывает воздействие на звенья управления (26) напрямую связанные со стропами управления (4), что идентично действиям для управления парашютом при совершении прыжка с парашютом.
Для имитации увеличения скорости планирования тренируемый (обучаемый) оказывает воздействие на передние свободные концы, что идентично действиям для увеличения скорости планирования при совершении прыжка с парашютом.
При одновременном втягивании строп управления или натяжении задних свободных концов, имитации уменьшается величина горизонтальной и вертикальной составляющей скорости планирования, что идентично действиям для изменения горизонтальной составляющей скорости планирования при совершении прыжка с парашютом.
Для имитации разворота парашютной системы тренируемым (обучаемым) (13) производится втягиванием строп управления (4) или натяжением одного из свободных концов. Разворот вправо производится втягиванием правой стропы управления или натяжением одного из правых свободных концов (переднего или заднего). Разворот влево производится втягиванием левой стропы управления или натяжением одного из левых свободных концов (переднего или заднего).
Скорость разворота зависит от величины натяжения стропы управления. Чем сильнее втянута стропа управления - тем меньше время разворота. При этом следует учитывать, что каждый следующий разворот происходит за меньшее время с увеличением потери высоты, что идентично действиям при совершении прыжка с парашютом.
При имитации нештатной работы парашютной системы и особых случаях во время совершения прыжка с парашютом, закрепленных в руководстве по воздушно-десантной подготовке [7], например закрутка строп или перехлестывание купола парашюта, тренируемым (обучаемым) (13) доложен взяться руками за свободные концы, стропы управления (4) и провести действия предусмотренные руководством по воздушно-десантной подготовке.
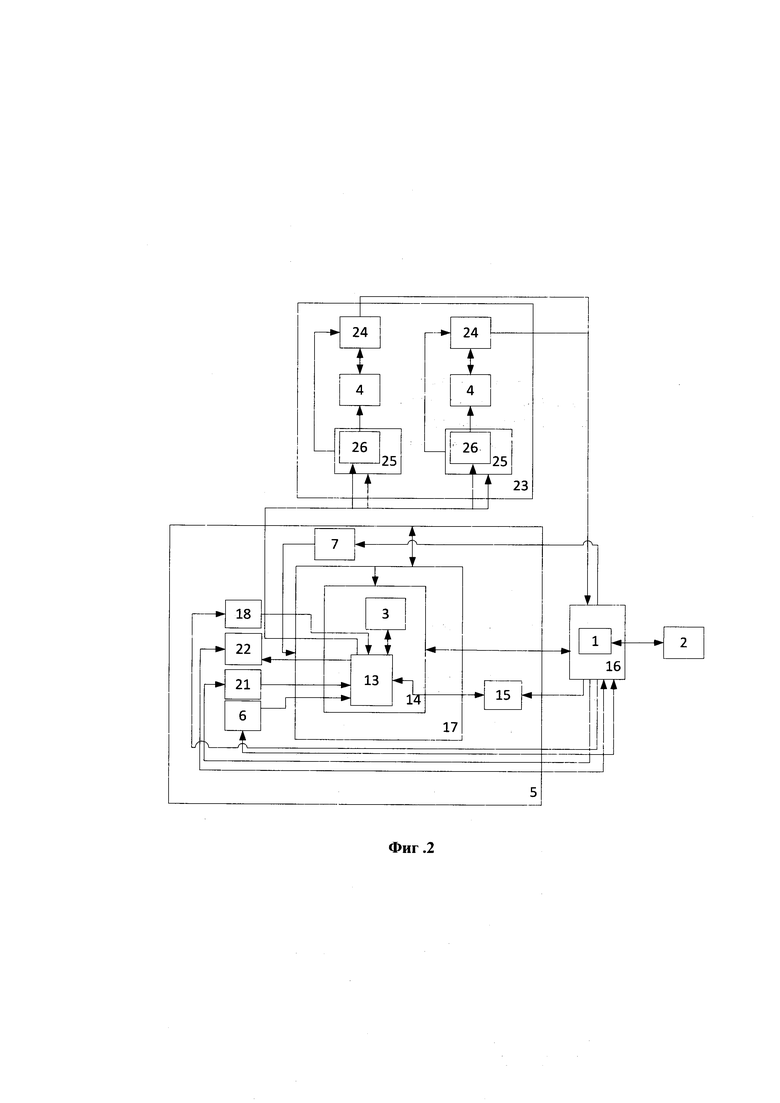
Устройство, реализующее предлагаемый способ приведено на фиг. 2 и состоит из связанных между собой вновь введенной рамы свободных концов и строп (23), содержащая каретки управления (24), свободные концы (25), звенья управления (26), видеокамеры (22), колонки акустической системы (21), закрепленные на раме тренажера (5), жестко закрепленной на Земле рамы тренажера (5) с электроприводами (7) в виде фермы равно профильного сечения с постаментом, содержащего регулируемую по высоте дорожку с движущимся полотном (15), шкафа управления (16), содержащего в частности управляющий компьютер (1), рабочего места инструктора (преподавателя) (2), ранца подвесной системой (3) парашюта, тренируемого (обучаемого) (13), очков виртуальной реальности (6) связанного с управляющим компьютером (1), закрепленной на рамы тренажера (5) рамы тренажера с противовесами (17), выполненных в виде генераторов воздушного потока (18), устройства фиксации спины тренируемого (обучаемого) с приводом его вращения (14), закрепленных на раме тренажера с противовесами (17).
Внешний вид устройства, реализующее предлагаемый способ представлен на фиг. 4.
Предлагаемое устройство, реализующее предлагаемый способ, работает следующим образом:
Тренируемый (обучаемый) (13), помещается в ранец подвесной системой (3) парашюта, закрепленный на устройстве фиксации спины тренируемого (обучаемого) с приводом его вращения (14), где он фиксируется с помощью стандартных лямок подвесной системы. На голову тренируемому (обучаемому) (20) надевают шлем виртуальной реальности (6).
Тренируемый (обучаемый) (13) закрепленный в устройстве фиксации спины тренируемого (обучаемого) с приводом его вращения (14) и ранце подвесной системы (3) парашюта, помещается в раме с противовесом (17), выполненным в виде генераторов воздушного потока (18), таким образом, чтобы касаться ногами регулируемой по высоте дорожку с движущимся полотном (15) постамента.
Шлем виртуальной реальности (6) начинает отображать сформированные управляющим компьютером (1), по команде с рабочего места инструктора (преподавателя) (2) объекты в виртуальном пространстве (летальный аппарат, аппарель, других виртуальных тренируемых, одежду, систему крепления парашюта и т.д.) таким образом, обеспечивается возможность полунатурной имитации выхода тренирующегося из аппарели летательного аппарата.
С рабочего места инструктора (преподавателя) (2) через управляющий компьютер (1) запускается программа, которая осуществляет управление тренажером и осуществляет формирование виртуального пространства. Программное обеспечение тренажера обеспечивает отработку как штатного спуска тренируемого (обучаемого) (13) с парашютом, так и действия в нештатных ситуациях, например, при отказе основного парашюта. Виртуальное пространство формируется управляющим компьютером (1), а образованное виртуальное пространство, в котором тренируемый (обучаемый) (13) видит трехмерное изображение виртуального мира, отображается тренируемому (обучаемому) (13) в шлеме виртуальной реальности (6), располагаемом на голове тренируемого (обучаемого) (13).
По команде, поступающей от управляющего компьютера (1), видеокамеры (22) распложенные на раме тренажера (5) и направленные на тренируемого (обучаемого) (13), начинают запись положения рук, ног, головы тренируемого (обучаемого) (13) и их изменение в процессе выполнения имитационного прыжка с парашютом на предлагаемом тренажере воздушно-десантной подготовки.
Данные от видеокамеры (22) поступают через управляющей компьютер (1) в рабочее место инструктора (преподавателя) (2), где хранятся и демонстрируется совместно с данными о виртуальном пространстве при необходимости просмотра видеофиксации имитационного прыжка с парашютом тренируемого (обучаемого) (13).
Аудиосопровождение тренировки производится управляющим компьютером (1) через колонки акустической системы (21). Колонки акустической системы (21) начинают воспроизводить сформированные управляющим компьютером (1), по команде с рабочего места инструктора (преподавателя) (2) звуки, идентичные звукам, окружающим парашютиста при совершении прыжка с парашютом в реальных условиях - шум летального аппарата, гул ветра, голос выпускающего, подающего команды тренируемому (обучаемому) (13) «Приготовиться», «Пошел», «Отставить», звук вытягивания звена ручного раскрытия парашюта, «шелест» от раскрытия парашюта и т.д..
После выхода тренируемого (обучаемого) (13) из имитируемой в виртуальном пространстве аппарели летательного аппарата, по команде из шкафа управления (16), содержащего в частности управляющий компьютер (1), регулируемая движущаяся дорожка постамента резко отъезжает назад и вниз, электропривод (7), отклоняет раму с противовесами (17), выполненными в виде генераторов воздушного потока (18), с тренируемым (обучаемым) (13), закрепленным в ранце подвесной системы (3) парашюта на устройстве фиксации спины тренируемого (обучаемого) с приводом его вращения (14).
Положение рамы с противовесами (17), выполненными в виде генераторов воздушного потока (18), изменяется относительно горизонтальной плоскости поверхности Земли, при помощи электроприводов (7). Рама с противовесами (17), выполненными в виде генераторов воздушного потока (18), сначала отклоняется вперед на угол 10 градусов, имитируя покидание борта летательного аппарата в положении, называемом в профильной литературе - «лечь на поток» [12], а затем назад, на угол от 90 до 100 градусов, так, чтобы тело тренируемого (обучаемого) (13) находилось в плоскости параллельной плоскости поверхности Земли,
После окончания фазы имитируемой в виртуальном пространстве, соответствующей фазе свободного падения при совершении прыжка с парашютом, по команде из шкафа управления (16), содержащего в частности управляющий компьютер (1), электропривод (7) изменяет положение рамы с противовесами (17), выполненными в виде генераторов воздушного потока (18), относительно плоскости поверхности Земли отклоняет ее вперед так, что бы тело тренируемого (обучаемого) (13) находилось в плоскости перпендикулярной плоскости поверхности Земли имитируя раскрытие парашюта.
При вращении; на угол от 90 до 100 градусов назад, рама с противовесами (17), выполненными в виде генераторов воздушного потока (18), сцепляется при помощи электромагнита (в графической части не показан) с рамой свободных концов и строп (23), содержащей каретки управления (24), стропы управления (4), свободные концы (25) и звенья управления (26). В момент имитации раскрытия парашюта, рама с противовесами (17), сцепленная с рамой свободных концов и строп (23) начинает вращаться в обратную сторону занимая исходное положение. После окончания перемещения рама свободных концов и строп (23) находится под углом 90 градусов к раме с противовесами (17).
Тренируемый (обучаемый) (13), осматривает в виртуальном пространстве в шлеме виртуальной реальности (6) и осязает свободные концы (25) парашюта, освобождает звенья управления (26) закрепленные на свободных концах (25) и связанные через стропы управления (4) с каретками управления (24).
Тренируемый (обучаемый) (13) воздействуя на звенья управления (26) или свободные концы (25) формирует в каретках управления (24) сигналы, обрабатываемые в шкафу управления (16) для выдачи управляющих сигналов механизму привода вращения устройства фиксации спины (14), которое вращает устройство фиксации спины, тренируемого (обучаемого) с приводом его вращения (14), изменяя крен положения тела тренируемого (обучаемого) (13), в устройстве фиксации спины тренируемого (обучаемого) с приводом его вращения (14) относительно вертикальной плоскости по отношению к поверхности Земли. При этом каретки управления (24), на которых закреплены свободные концы (25) также перемещаются по направляющим в сторону наклона устройства фиксации спины тренируемого (обучаемого) с приводом его вращения (14), что имитирует работу парашюта в реальном прыжке.
Изменения положения тела, тренируемого (обучаемого) (13) в устройстве фиксации спины, тренируемого (обучаемого) с приводом его вращения (14) обрабатываются в шкафу управления (16), управляющий компьютер (1), формирует виртуальное пространство с изменениями относительно положения тела, тренируемого (обучаемого) (13), в шлеме виртуальной реальности (6), продолжает отображать виртуальные объекты, таким образом, обеспечивается возможность имитации свободного падения и спуска на парашюте.
При отработке действий при нештатных ситуациях (закрутке строп парашюта) тренируемый (обучаемый) (13) сводит вместе свободные концы (25), тем самым перемещает по раме свободных концов и строп (23) каретки управления (24). При перемещении кареток управления (24) сигналы, обрабатываемые в шкафу управления (16), управляющий компьютер (1), формирует виртуальное пространство с изменениями положения свободных концов (25), строп управления (4) и купола парашюта, отображая в шлеме виртуальной реальности (6).
Для имитации потока воздуха при реальном прыжке у тренируемого (обучаемого) (13), потоки воздуха формируются генераторами воздушного потока (18) и обдувают тренируемого (обучаемого) (13), потоки воздуха изменяются генераторами воздушного потока (18) по команде шкафа управления (16) в зависимости от данных поступающих от шлема виртуальной реальности (6). Дополнительно управляющий компьютер (1) может создавать аудио имитацию ветра и передавать звуки тренируемому (обучаемому) (13) через встроенные аудионаушники (11) в шлеме виртуальной реальности (6).
Таким образом осуществляется имитация сноса парашютиста, срыва парашюта или свободного падения.
Данные от устройства фиксации спины тренируемого (обучаемого) с приводом его вращения (14), кареток управления (24), генераторов воздушного потока (18) поступают в управляющий компьютер (1) шкафа управления (16), где обрабатываются совместно с данными о виртуальном пространстве. Управляющий компьютер (1), принимая во внимание массу тела, тренируемого (обучаемого) (13), ускорение свободного падения, направление и скорость имитируемого ветра, взаимодействие тренируемого (обучаемого) (13) с объектами в виртуальном пространстве, генерирует изменения в виртуальном пространстве с учетом обработанных данных, например, измененные положения в виртуальном пространстве частей парашюта или положения облаков, поверхности Земли.
Измененные данные виртуального пространства отображаются тренируемому (обучаемому) (13) в шлеме виртуальной реальности (6), а также выводятся на рабочее место инструктора (преподавателя) (2).
Формирование виртуального пространства с изменениями, связанными с физическими действиями тренируемого (обучаемого) (13), в реальном пространстве и отображением данного пространства тренируемому (обучаемому) (13), обеспечивает возможность имитации и отработки действий по управлению основным или запасным парашютом в процессе снижения и приземления, гашения скорости полета, тренируемого (обучаемого) перед приземлением, применения запасного парашюта, применения спецсредств во время десантирования.
Инструктор (преподаватель) на рабочем месте инструктора (преподавателя) (2), основываясь на данных видеокамеры (22), фиксации спины тренируемого (обучаемого) с приводом его вращения (14), кареток управления (24), генераторов воздушного потока (18) обработанных управляющим компьютером (1) проводит мониторинг и анализ правильности действий тренируемого (обучаемого) (13) после поступления команд выпускающего, во время выполнения прыжка и приземления.
По команде «Приготовиться», тренируемый (обучаемый) (13) должен [2]:
а) встать, визуально проверить зацепление карабина на ранце с подвесной системы (3), убедиться, что имитируемый прибор на запасном парашюте не разблокирован (блокировочный шнур должен находиться в петле);
б) занять исходное положение для прыжка - подойти к аппарели (если тренируемый (обучаемый) (13) прыгает первым в заходе) или встать за парашютистом, прыгающим раньше;
в) правой рукой взяться за вытяжное кольцо, левую руку наложить на правую.
По команде «Пошел» тренируемый (обучаемый) (13) отделяется от имитируемого летательного аппарата в следующей последовательности:
а) серединой ступни левой ноги упереться в задний нижний угол двери (аппарели);
б) слегка нагнувшись, плавно оттолкнуться от порожка двери.
В зависимости от типа парашюта, его раскрытие производится либо вытяжным кольцом, либо мягким вытяжным парашютом.
При выполнении раскрытия имитируемого парашюта вытяжным кольцом:
а) Отделившись от имитируемого в виртуальном пространстве летательного аппарата, необходимо занять горизонтальное положение, принять позу падения - руки в стороны чуть вперед, согнутые в локтях, ноги полусогнуты в коленях и разведены. Тело держать свободно, не напрягать.
б) После отделения от имитируемого в виртуальном пространстве летательного аппарата в свободном падении осуществлять контроль высоты и времени падения по высотомеру, моделируемому в виртуальном пространстве на левой руке тренируемого (обучаемого) (13).
в) За 400 м до заданной высоты раскрытия парашюта (2 с при отсчете времени раскрытия) найти взглядом вытяжное кольцо основного парашюта, убрать кисти обеих рук к груди, левой взяться за кольцо и выдернуть его на всю длину выпрямленной руки. Правую руку при этом выпрямить вперед вправо синхронно с левой рукой.
При выполнении раскрытия имитируемого парашюта мягким вытяжным парашютом:
а) Отделившись от имитируемого в виртуальном пространстве летательного аппарата, необходимо занять горизонтальное положение, принять позу падения -руки в стороны чуть вперед, согнутые в локтях, ноги полусогнуты в коленях и разведены. Тело держать свободно, не напрягать.
б) После отделения от имитируемого в виртуальном пространстве летательного аппарата в свободном падении осуществлять контроль высоты и времени падения по высотомеру, моделируемому в виртуальном пространстве на левой руке тренируемого (обучаемого) (13).
в) За 600 м до заданной высоты раскрытия парашюта (3 с при отсчете времени раскрытия),в зависимости от типа парашюта, должен либо перевести левую руку к голове, а правой - найти на нижнем обрезе ранца подвесной системой (3) втулку вытяжного парашюта и вытащить за нее мягкий вытяжной парашют из кармана ранца подвесной системы (3) и сразу же отвести его в сторону на длину вытянутой руки до уровня плеча, без задержки выпустить его в поток, либо правой рукой вытащить кольцо звена ручного раскрытия основного парашюта.
Почувствовав рывок (динамический удар) визуально коррелированный с моделированием открытия парашюта, - тренируемый (обучаемый) (13) должен:
а) поднять голову вверх и осмотреть парашют;
б) убедиться в его исправности и правильности раскрытия.
Выполняя управление куполом основного парашюта на этапе снижения (выполняя развороты и скольжения влево и вправо), выдерживается глиссаду снижения и обеспечить посадку в заданный район приземления.
Перед приземлением заблаговременно (учитывая время разворота парашюта) до высоты 100-150 м подготовится к приземлению и принять правильное для приземления положение тела:
а) развернуться строго лицом против ветра. Направление ветра определяется по установленному на площадке приземления указателю ветра или по стреле, выложенной на площадке приземления, а также по смещению относительно тренируемого (обучаемого) (13) местных предметов на земле;
б) ноги соединить в коленях и ступнях вместе и, в зависимости от скорости ветра, вынесены вперед, а в штилевую погоду держать почти вертикально, полусогнутыми в коленях;
в) ступни ног параллельны земле
За 10-15 сек до касания смоделированной в виртуальном пространстве земли тренируемый (обучаемый) (13) должен принять изготовочную позу и встретить землю в сгруппированном состоянии. Касаться земли необходимо полными ступнями обеих ног одновременно (во избежание растяжения голеностопных суставов или других повреждений ног). Стопы управления одновременно опустить вниз, для компенсации вертикальной скорости снижения. Чтобы уменьшить силу удара при приземлении, необходимо ноги слегка согнуть в коленях и держать их напряженно до встречи с землей, коснувшись сделать небольшое приседание, чтобы смягчить удар.
В момент приземления тренируемый (обучаемый) (13) не должен пытаться устоять на ногах - необходимо упасть вперед или на бок (при сильном ветре сделать перекат). Также отлеживаются действия тренируемых (обучаемых) (13) в особых (нештатных) случаях (отказ летательного аппарата на разных высотах, попадание стабилизирующего или вытяжного парашюта в ноги парашютиста, зависание парашютиста за летательным аппаратом, закрутка строп, схождение парашютистов в воздухе и попадание в стропы другого парашютиста, закрутка строп, попадание в восходящие и нисходящие потоки, перехлестывание парашюта стропами, отказы парашюта в работе, приземление на препятствия).
Предложенный способ подготовки парашютистов в отличие от способа-прототипа, за счет обеспечения совершения тренируемым (обучаемым) действий идентичных действиям совершаемых парашютистом при совершении реального прыжка с парашютом после раскрытия купола парашюта, то есть введения в работу средств управления парашютом в виде свободных концов с зачарованными на них звеньями управления со стропами управления, их дальнейшей расчековкой и управления имитируемой парашютной системой во время выполнения прыжка как с помощью свободных концов парашютной системы, так и с помощью звеньев управления со стропами управления, дает возможность отрабатывать навыки по управлению парашютом в процессе прыжка и приземления и обеспечивает возможность формирования необходимых связанных навыков и действий парашютиста после открытия парашюта парашютной системы при штатном десантирование и в нештатных ситуациях.
Предложенное устройство в отличие от устройства, реализующего способ прототип дает возможность отрабатывать навыки по управлению парашютом в процессе прыжка в соответствии с руководством по воздушно-десантной подготовке [7], технический результат, заключающийся в возможности выполнения маневрирования, при имитации выполнении прыжков с парашютом, как методом воздействия на звенья управления строп управления парашютом, так и методом перекрещивания свободных концов подвесной системы, что повышает качество обучения парашютистов на тренажер воздушно-десантной подготовки и обеспечивает сокращение времени подготовки парашютистов при освоении ими новых парашютных систем.
Источники информации
1. Патент № 2389528 «Аэродинамическая труба для подготовки парашютистов». Опубликовано 20.05.2010. Бюл. № 14.
2. Патент № 2458825 «Устройство для имитации затяжного прыжка с парашютом с вертикальной аэродинамической трубой (варианты) и вертикальная аэродинамическая труба». Опубликовано 20.08.2012. Бюл. № 23.
3. Патент № 2267449 «Десантный тренажер». Опубликовано 10.01.2006. Бюл. № 1.
4. Патент № 2578906 «Тренажер парашютиста десантника». Опубликовано 27.03.2016. Бюл. № 9.
5. Патент № 2538996 «Тренажер парашютиста». Опубликовано 10.01.2015. Бюл. № 1.
6. Патент № 2730759 «Способ подготовки парашютистов и устройство его реализующее». Опубликовано: 25.08.2020. Бюл. № 24.
7. Руководство по воздушно-десантной подготовке. – М.: АО «Красная Звезда», 2017 - 328 с.
8. Система парашютная специального назначения Арбалет-2. Техническое описание и инструкция по эксплуатации 610-99 ТО.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ подготовки парашютистов на тренажере воздушно-десантной подготовки | 2024 |
|
RU2832446C1 |
| Тренажер для парашютно-спасательной подготовки летного состава авиации | 2022 |
|
RU2792911C1 |
| Способ подготовки парашютистов и устройство его реализующее | 2019 |
|
RU2730759C1 |
| Устройство имитации прыжка с парашютом | 2023 |
|
RU2808184C1 |
| ТРЕНАЖЁР ДЛЯ ОТРАБОТКИ ПРЫЖКОВ С ПАРАШЮТОМ (ВАРИАНТЫ) | 2019 |
|
RU2713681C1 |
| Способ подготовки летного состава к аварийному покиданию летательного аппарата и устройство его реализующее | 2024 |
|
RU2832486C1 |
| Способ наземной отработки элементов парашютной подготовки и устройство, его реализующее | 2023 |
|
RU2832674C2 |
| Тренажер для наземной подготовки парашютиста | 2023 |
|
RU2806470C1 |
| Способ подготовки парашютистов на тренажере к высотному десантированию и устройство его реализующее | 2021 |
|
RU2776783C1 |
| ТРЕНАЖЕР ПАРАШЮТИСТА-ДЕСАНТНИКА И СПОСОБ ДИНАМИЧЕСКОГО СОПРОВОЖДЕНИЯ ОБУЧЕНИЯ НА НЕМ | 2016 |
|
RU2653900C1 |

Группа изобретений относится к тренажеру и способу подготовки парашютистов для воздушно-десантной подготовки. Тренажер состоит из жестко закрепленной на Земле рамы тренажера с электроприводами и постаментом, устройства фиксации спины тренируемого с приводом его вращения и датчиками фиксации воздействий, ранца подвесной системы парашюта, шкафа управления с управляющим компьютером, рабочего места инструктора, строп управления, шлема виртуальной реальности, рамы с противовесами, рамы свободных концов и строп управления, видеокамеры, колонок акустической системы, шлема виртуальной реальности. Постамент содержит регулируемую по высоте дорожку с движущимся полотном. Противовесы выполнены в виде генераторов воздушного потока. Достигается повышение качества обучения парашютистов. 2 н.п. ф-лы, 5 ил.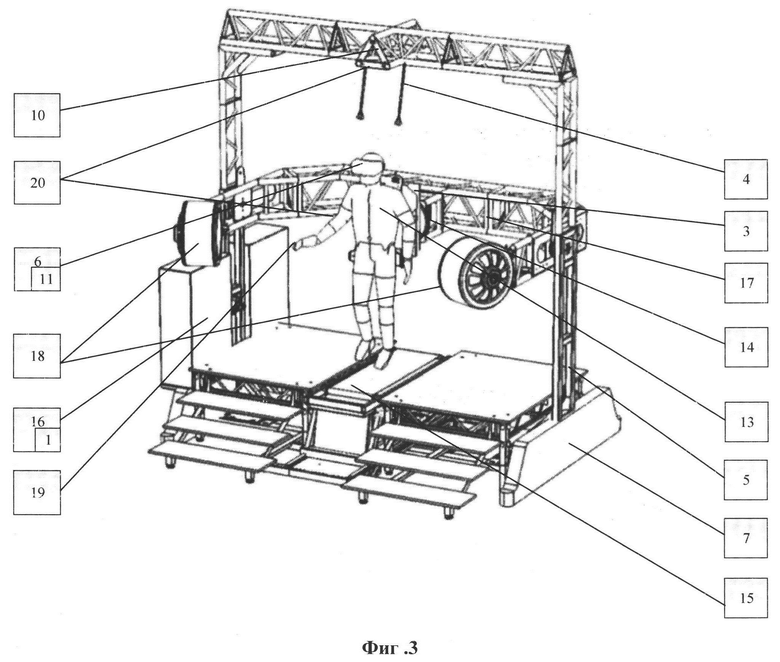
1. Способ подготовки парашютистов для воздушно-десантной подготовки, заключающийся в том, что через управляющий компьютер создают виртуальное пространство и выдают команды на обучение обучаемому парашютисту в шлеме виртуальной реальности, занимающему место в подвесной системе парашюта, закрепленной на раме тренажера, посредством программного обеспечения на основе 3D-симуляции создают виртуальное пространство, с учетом физических параметров, динамики парашютного спуска и различных параметров окружающей среды, типов парашютных систем, времени суток, погодных условий, рельефа местности, высоты и скорости полета, используя датчики, фиксирующие воздействия на элементы подвесной системы парашюта, также посредством программного обеспечения формируют изменение виртуального пространства, моделируя движения в воздушной среде от момента покидания летательного аппарата до приземления, после покидания имитируемого летательного аппарата создают обдув потоком воздуха для имитации воздействия воздушного потока при выполнении прыжка с парашютом, для имитации свободного полета осуществляют вначале наклон вперед рамой с противовесами, а затем назад, запрокидывая на спину, функциональным устройством обеспечивают изменение направлений и свобод перемещения в пространстве, идентичное перемещениям при свободном падении и раскрытии парашюта, также имитируют касание поверхности Земли и перемещения по ней, за счет физического касания и перемещения по регулируемой движущейся дорожке в момент, скоординированный по времени с демонстрирующимся в шлеме виртуальной реальности пейзажем места приземления, отличающийся тем, что после введения в работу имитируемого парашюта свободные концы физически появляются в пространстве, для управления парашютной системой вынимают звенья управления из шлевок фиксации на свободных концах, расчековывают звенья управления, управление имитируемой парашютной системой осуществляют путем воздействия на свободные концы, звенья управления и стропы управления.
2. Тренажер подготовки парашютистов для воздушно-десантной подготовки для реализации способа по п. 1, состоящий из жестко закрепленной на Земле рамы тренажера с электроприводами и постаментом, содержащим регулируемую по высоте дорожку с движущимся полотном, рама тренажера также содержит раму с противовесами, выполненными в виде генераторов воздушного потока, устройство фиксации спины тренируемого с приводом его вращения и датчиками фиксации воздействий, закрепленного к устройству фиксации ранца подвесной системой парашюта, шкафа управления с управляющим компьютером, рабочего места инструктора, строп управления, шлема виртуальной реальности, отличающийся тем, что в жестко закрепленную на Земле раму введена рама свободных концов и строп управления, при этом рама содержит каретки управления, получающие воздействие от свободных концов звеньев управления строп, а также видеокамеры, колонки акустической системы, при этом виртуальное пространство в шлеме виртуальной реальности формируется управляющим компьютером шкафа управления посредством данных, полученных посредством устройства фиксации спины парашютиста, кареток управления, дорожки с движущимся полотном, датчиков, фиксирующих действия обучаемого, посредством видеокамеры производят съемку обучаемого и отправку данных в управляющий компьютер для хранения.
| Способ подготовки парашютистов и устройство его реализующее | 2019 |
|
RU2730759C1 |
| ТРЕНАЖЁР ДЛЯ ОТРАБОТКИ ПРЫЖКОВ С ПАРАШЮТОМ (ВАРИАНТЫ) | 2019 |
|
RU2713681C1 |
| ТРЕНАЖЕР ПАРАШЮТИСТА | 2019 |
|
RU2712355C1 |
| ТРЕНАЖЕР ПАРАШЮТИСТА-ДЕСАНТНИКА И СПОСОБ ДИНАМИЧЕСКОГО СОПРОВОЖДЕНИЯ ОБУЧЕНИЯ НА НЕМ | 2016 |
|
RU2653900C1 |
| Способ погружения в виртуальную реальность, подвес и экзо-скелет, применяемые для его реализации | 2015 |
|
RU2646324C2 |

