Изобретение относится к области радиолокации и может быть использовано в наземных радиолокационных станциях (РЛС) для определения путевой скорости (модуля вектора скорости) неманеврирующей аэродинамической цели (АЦ).
Известны способы и устройства измерения путевой скорости, в которых сначала определяют скорости изменения прямоугольных декартовых координат  и
и  , затем вычисляют путевую скорость по формуле:
, затем вычисляют путевую скорость по формуле:  [1, с. 314].
[1, с. 314].
Известны устройства определения скорости изменения прямоугольных декартовых координат  и
и  с помощью цифрового нерекурсивного фильтра (ЦНРФ) путем оптимального взвешенного суммирования фиксированной выборки значений этих координат [1, с. 300-304].
с помощью цифрового нерекурсивного фильтра (ЦНРФ) путем оптимального взвешенного суммирования фиксированной выборки значений этих координат [1, с. 300-304].
Известны устройства определения скорости изменения прямоугольных декартовых координат и с помощью α, β фильтра путем последовательного оптимального сглаживания выборки нарастающего объема значений этих координат [1, с. 321-322].
Основным недостатком этих устройств является низкая точность определения путевой скорости неманеврирующей АЦ в РЛС с грубыми измерениями азимута, в частности в РЛС метрового диапазона волн.
Наиболее близким аналогом (прототипом) заявленного изобретения являются способ и устройство радиолокационного определения путевой скорости неманеврирующей воздушной цели, в котором путевую скорость определяют по фиксированной выборке значений квадратов дальности с помощью ЦНРФ и устранено влияние ошибок измерения азимута [2].
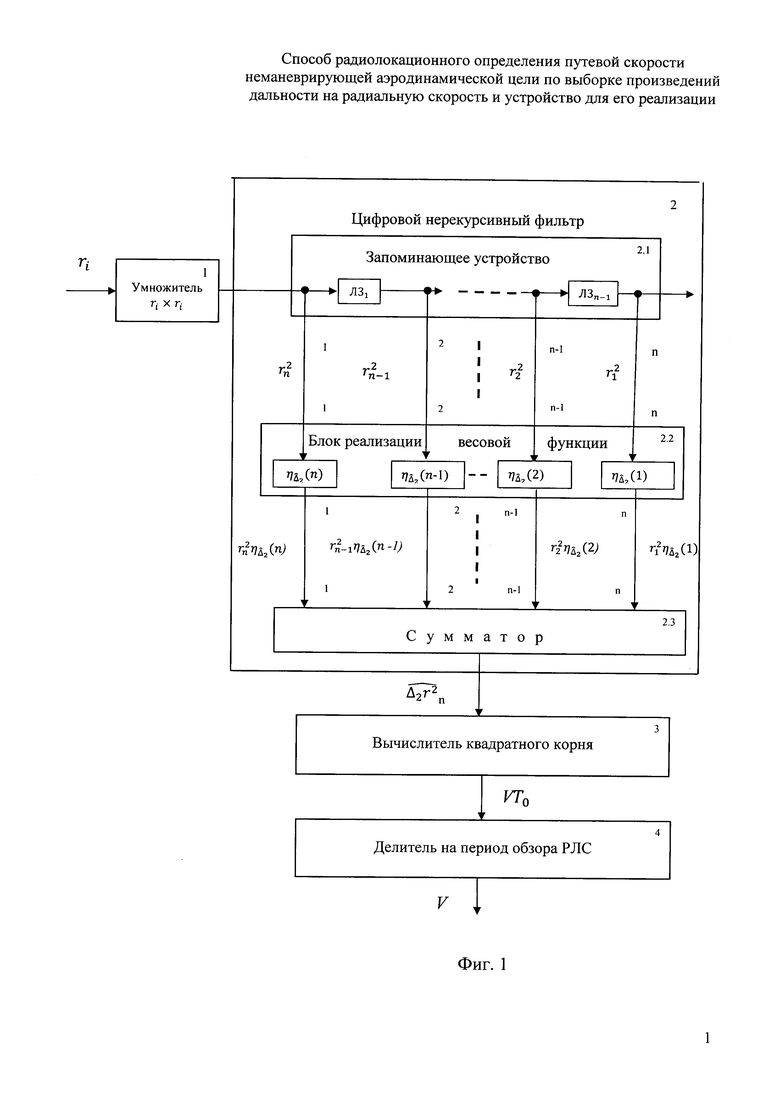
Сущность прототипа поясняется схемой, приведенной на фиг. 1. Устройство-прототип содержит последовательно соединенные умножитель (блок 1), ЦНРФ (блок 2), вычислитель квадратного корня (блок 3) и делитель на период обзора РЛС (блок 4), выход которого является выходом устройства-прототипа.
В умножителе (блок 1) перемножают входные сигналы, то есть измеренные значения дальности, и получают квадраты измеренных значений дальности  . В ЦНРФ (блок 2) формируют фиксированную выборку перемноженных сигналов и определяют сглаженное значение (оценку) второго приращения квадрата дальности за обзор
. В ЦНРФ (блок 2) формируют фиксированную выборку перемноженных сигналов и определяют сглаженное значение (оценку) второго приращения квадрата дальности за обзор  путем оптимального взвешенного суммирования фиксированной выборки из n значений квадратов дальности. При этом весовые коэффициенты оценки второго приращения
путем оптимального взвешенного суммирования фиксированной выборки из n значений квадратов дальности. При этом весовые коэффициенты оценки второго приращения  могут быть рассчитаны заранее по формуле:
могут быть рассчитаны заранее по формуле:  [3, с. 155, формула 4.37]. Далее в блоке 3 вычисляют квадратный корень из полученной оценки. Полученный результат делят в блоке 4 на период обзора Т0 и получают сглаженное значение путевой скорости неманеврирующей АЦ.
[3, с. 155, формула 4.37]. Далее в блоке 3 вычисляют квадратный корень из полученной оценки. Полученный результат делят в блоке 4 на период обзора Т0 и получают сглаженное значение путевой скорости неманеврирующей АЦ.
При высокоточных измерениях дальности (среднеквадратические ошибки (СКО) σr≤25..50 м) точность определения путевой скорости в РЛС с грубыми измерениями азимута и угла места АЦ повышается в несколько раз по сравнению со способами оценивания по выборкам декартовых координат.
Однако при больших ошибках измерения дальности (σr>100 м) преимущество способа-прототипа перед способами оценивания по выборкам декартовых координат практически утрачивается.
Техническим результатом заявленного изобретения является повышение точности определения путевой скорости неманеврирующей АЦ за счет использования выборок произведений дальности на радиальную скорость и уменьшения, вследствие этого, влияния ошибок измерения дальности.
Указанный технический результат достигается тем, что в заявленном способе, как в прототипе, производят перемножение входных сигналов, формирование фиксированной выборки перемноженных сигналов, определение оценки приращения перемноженных сигналов за период обзора РЛС, деление оценки на период обзора и вычисление квадратного корня.
В отличие от прототипа, согласно изобретению, в качестве входных сигналов используют данные измерений дальности и радиальной скорости, в результате перемножения входных сигналов получают произведения дальности на радиальную скорость, формируют фиксированную выборку произведений дальности на радиальную скорость, по этой фиксированной выборке определяют оценку первого приращения произведения дальности на радиальную скорость  за период обзора РЛС, делят полученную оценку на период обзора РЛС и получают квадрат путевой скорости V2, из полученного результата вычисляют квадратный корень и определяют сглаженное значение V путевой скорости неманеврирующей АЦ.
за период обзора РЛС, делят полученную оценку на период обзора РЛС и получают квадрат путевой скорости V2, из полученного результата вычисляют квадратный корень и определяют сглаженное значение V путевой скорости неманеврирующей АЦ.
Заявляемое устройство, как и прототип, содержит последовательно соединенные умножитель входных сигналов и цифровой нерекурсивный фильтр, обеспечивающий формирование фиксированной выборки перемноженных сигналов и определение оценки приращения перемноженных сигналов за период обзора РЛС, а также делитель на период обзора РЛС и вычислитель квадратного корня.
В отличие от прототипа, согласно изобретению, на вход умножителя подают данные измерений дальности и радиальной скорости, выход цифрового нерекурсивного фильтра, обеспечивающего определение оценки первого приращения произведения дальности на радиальную скорость за период обзора РЛС, соединен с входом делителя на период обзора, выход которого соединен с входом вычислителя квадратного корня, на выходе которого, являющимся выходом заявленного устройства, определяют значение путевой скорости.
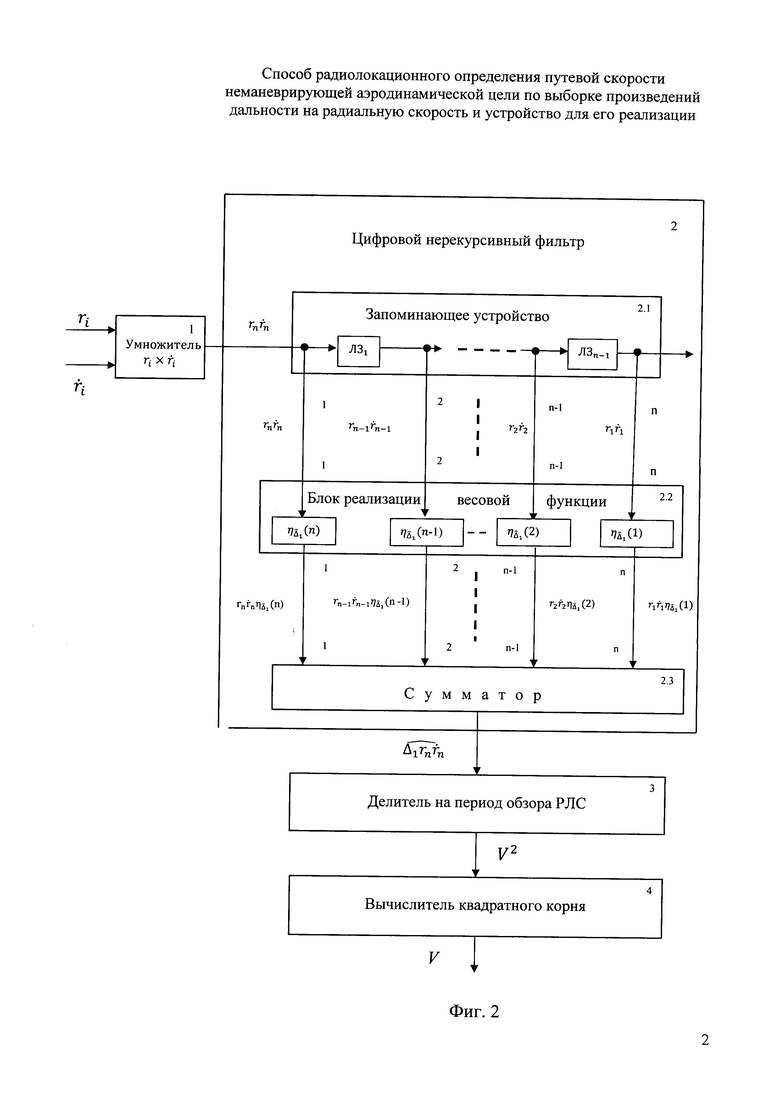
Сущность изобретения поясняется структурной схемой заявленного устройства, приведенной на фиг. 2. В умножителе (блок 1) перемножают входные сигналы, то есть данные измерений дальности и радиальной скорости. В ЦНРФ формируют фиксированную выборку из n произведений дальности на радиальную скорость и определяют сглаженное значение (оценку) первого приращения произведения дальности на радиальную скорость за обзор  . В отличие от прототипа, весовые коэффициенты оценки первого приращения
. В отличие от прототипа, весовые коэффициенты оценки первого приращения  вычисляют по формуле:
вычисляют по формуле:  , где i - порядковый номер измерения в выборке [3, С. 151, формула 4.27].
, где i - порядковый номер измерения в выборке [3, С. 151, формула 4.27].
Так же, как в прототипе, объем фиксированной выборки n в ЦНРФ зависит от количества линий задержки (ЛЗ) в запоминающем устройстве 2.1 и умножителей в блоке реализации весовой функции 2.2. Все элементы ЦНРФ могут быть выполнены как в цифровом, так и в аналоговом виде [1, с. 303-304].
В отличие от прототипа, оценку первого приращения сначала делят на период обзора РЛС, а затем вычисляют квадратный корень из полученного результата. В устройстве определения путевой скорости выход ЦНРФ соединен с входом делителя на период обзора РЛС, выход которого соединен с входом вычислителя квадратного корня, выход которого является выходом заявленного устройства.
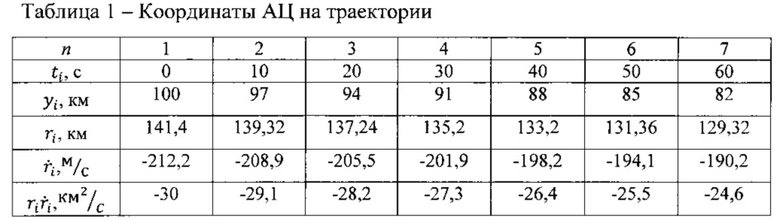
Для доказательства практического отсутствия систематических (методических) ошибок в заявленном способе вычислим значение путевой скорости АЦ по выборке из 7-ми значений дальности в соответствии с исходными данными, приведенными в таблице 1.
АЦ обнаруживается на дальности 100 км и летит к РЛС по нормали к оси X с постоянной скоростью  и курсовым параметром, равным 100 км. Путевая скорость вычисляется в соответствии с формулой 4.27:
и курсовым параметром, равным 100 км. Путевая скорость вычисляется в соответствии с формулой 4.27:
 .
.
Для сравнения точности определения путевой скорости в заявленном устройстве, в устройстве-прототипе и в аналогах (устройствах оценивания по выборкам декартовых координат) вычислим значения среднеквадратических ошибок (СКО) определения оценки путевой скорости по формулам:
- для заявленного способа:  ;
;
- для прототипа:  ;
;
- для аналога:  ,
,
где  , σr, σβ - СКО измерения радиальной скорости, дальности и азимута;
, σr, σβ - СКО измерения радиальной скорости, дальности и азимута;
Q - курс АЦ;
rср, βср - дальность и азимут АЦ в середине интервала наблюдения;
 ,
,  = относительные СКО оценки первого и второго приращения на линейной и квадратичной траекториях, зависящие только от числа измерений в фиксированной выборке.
= относительные СКО оценки первого и второго приращения на линейной и квадратичной траекториях, зависящие только от числа измерений в фиксированной выборке.
Например, СКО определения оценки путевой скорости АЦ для приведенного примера в РЛС «Резонанс-Н» ( , σr=300 м, σβ=1,5°) будут равны: для заявленного способа -
, σr=300 м, σβ=1,5°) будут равны: для заявленного способа -  , для прототипа -
, для прототипа -  , для аналога -
, для аналога -  [4, С. 356-361]. При этом в заявленном способе ошибки измерения дальности (σr=300 м) ухудшают точность определения путевой скорости не более 5%. В прототипе СКО определения путевой скорости прямо пропорциональны ошибкам измерения дальности. Поэтому для обеспечения преимущества над аналогами нужны высокоточные измерения дальности. Например, при σr=50 м ошибка определения путевой скорости будет равна
[4, С. 356-361]. При этом в заявленном способе ошибки измерения дальности (σr=300 м) ухудшают точность определения путевой скорости не более 5%. В прототипе СКО определения путевой скорости прямо пропорциональны ошибкам измерения дальности. Поэтому для обеспечения преимущества над аналогами нужны высокоточные измерения дальности. Например, при σr=50 м ошибка определения путевой скорости будет равна  , то есть в два раза меньше, чем в аналоге.
, то есть в два раза меньше, чем в аналоге.
Таким образом, первые варианты заявленных способа и устройства обеспечивают повышение в несколько раз точности определения путевой скорости по сравнению с прототипом и аналогами. Однако заявленному варианту присущ следующий недостаток: необходимость хранения всех n значений дальности и радиальной скорости фиксированной выборки. При одновременном обслуживании большого числа целей и при больших интервалах наблюдения это приводит к существенному увеличению емкости запоминающих устройств.
Техническим результатом второго варианта заявленных способа и устройства является уменьшение объема хранимых предыдущих измерений дальности и радиальной скорости, а также повышение точности определения путевой скорости АЦ.
Указанный технический результат достигается тем, что во втором варианте заявленного способа радиолокационного определения путевой скорости неманеврирующей АЦ по выборке произведений дальности на радиальную скорость, включающем перемножение входных сигналов дальности и радиальной скорости, определение оценки первого приращения произведения дальности на радиальную скорость, деление оценки на период обзора РЛС, вычисление квадратного корня, согласно изобретению оценку первого приращения произведения дальности на радиальную скорость за период обзора РЛС определяют с помощью α, β фильтра, для этого по первым двум значениям произведений дальности на радиальную скорость ( и
и  ) в первых двух обзорах определяют начальное значение произведения дальности на радиальную скорость
) в первых двух обзорах определяют начальное значение произведения дальности на радиальную скорость  и начальное значение первого приращения произведения дальности на радиальную скорость
и начальное значение первого приращения произведения дальности на радиальную скорость  и задают начальные значения коэффициентов сглаживания
и задают начальные значения коэффициентов сглаживания  , β=1, далее во всех последующих обзорах (n=3, 5, .. N) значения коэффициентов сглаживания определяют по формулам
, β=1, далее во всех последующих обзорах (n=3, 5, .. N) значения коэффициентов сглаживания определяют по формулам  и
и  , где n - номер обзора, или задают некоторые фиксированные значения этих коэффициентов, определяют экстраполированное значение произведения дальности на радиальную скорость для n-го обзора путем суммирования предыдущих, полученных в (n-1)-м обзоре, сглаженных значений произведения дальности на радиальную скорость и сглаженного значения первого приращения произведения дальности на радиальную скорость, определяют сигнал ошибки между текущим значением произведения дальности на радиальную скорость и его экстраполированным значением, определяют текущие сглаженные значения произведения дальности на радиальную скорость путем суммирования экстраполированного значения произведения дальности на радиальную скорость и взвешенного коэффициентом сглаживания
, где n - номер обзора, или задают некоторые фиксированные значения этих коэффициентов, определяют экстраполированное значение произведения дальности на радиальную скорость для n-го обзора путем суммирования предыдущих, полученных в (n-1)-м обзоре, сглаженных значений произведения дальности на радиальную скорость и сглаженного значения первого приращения произведения дальности на радиальную скорость, определяют сигнал ошибки между текущим значением произведения дальности на радиальную скорость и его экстраполированным значением, определяют текущие сглаженные значения произведения дальности на радиальную скорость путем суммирования экстраполированного значения произведения дальности на радиальную скорость и взвешенного коэффициентом сглаживания  сигнала ошибки, в итоге определяют текущие сглаженные значения первого приращения произведения дальности на радиальную скорость путем суммирования (n-1) сглаженного значения первого приращения произведения дальности на радиальную скорость и взвешенного коэффициентом сглаживания β сигнала ошибки [1, с.319-322].
сигнала ошибки, в итоге определяют текущие сглаженные значения первого приращения произведения дальности на радиальную скорость путем суммирования (n-1) сглаженного значения первого приращения произведения дальности на радиальную скорость и взвешенного коэффициентом сглаживания β сигнала ошибки [1, с.319-322].
Указанный технический результат достигается тем, что во втором варианте заявленного устройства радиолокационного определения путевой скорости неманеврирующей АЦ по выборке произведений дальности на радиальную скорость, содержащем последовательно соединенные умножитель, блок определения первого приращения произведения дальности на радиальную скорость, делитель и вычислитель квадратного корня, выход которого является выходом заявленного устройства, согласно изобретению блок определения первого приращения произведения дальности на радиальную скорость является , β фильтром.
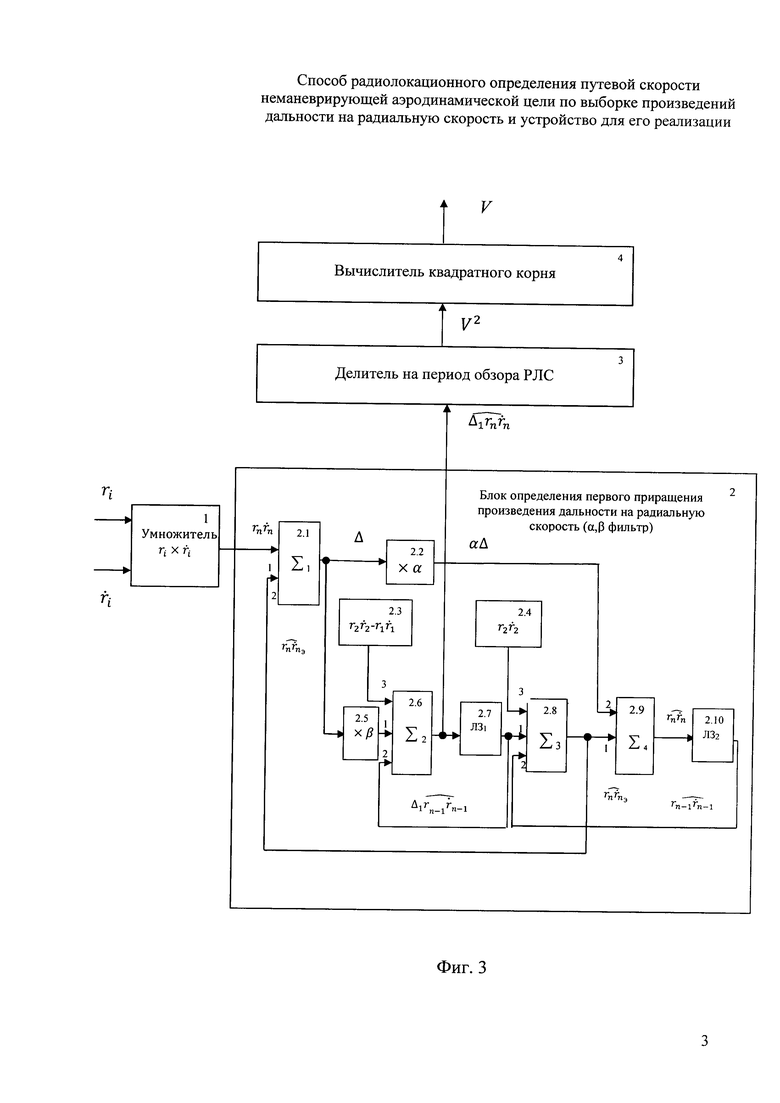
Сущность второго варианта заявленного способа поясняется структурной схемой устройства, приведенной на фиг. 3.
Основными элементами блока 2, то есть , β фильтра, являются сумматоры ∑1(2.1), ∑2(2.6), ∑3(2.8) и ∑4(2.9), которые выполняют операции алгебраического суммирования сигналов, представленных в цифровом виде. Первый сумматор ∑1 вычисляет сигнал ошибки Δ по результату последнего произведения измеренных значений дальности на измеренные значения радиальной скорости  и экстраполированному значению произведения
и экстраполированному значению произведения  , вычисленного в третьем сумматоре ∑3. Сигнал ошибки, умноженный в блоке 2.2 на коэффициент усиления фильтра , подается на 2-й вход четвертого сумматора ∑4, где суммируется с экстраполированным значением произведения . В итоге на выходе сумматора ∑4 получают оценку произведения
, вычисленного в третьем сумматоре ∑3. Сигнал ошибки, умноженный в блоке 2.2 на коэффициент усиления фильтра , подается на 2-й вход четвертого сумматора ∑4, где суммируется с экстраполированным значением произведения . В итоге на выходе сумматора ∑4 получают оценку произведения  , которую задерживают на период обзора в линии задержки ЛЗ2 (2.10) и подают на 2-й вход 3-го сумматора ∑3. Сигнал ошибки Δ, умноженный на коэффициент усиления фильтра β, подают также на 1-й вход второго сумматора ∑2(2.6), на 2-й вход которого подают с выхода первой линии задержки ЛЗ1 значение оценки первого приращения произведения
, которую задерживают на период обзора в линии задержки ЛЗ2 (2.10) и подают на 2-й вход 3-го сумматора ∑3. Сигнал ошибки Δ, умноженный на коэффициент усиления фильтра β, подают также на 1-й вход второго сумматора ∑2(2.6), на 2-й вход которого подают с выхода первой линии задержки ЛЗ1 значение оценки первого приращения произведения  в предыдущем обзоре. В итоге на выходе второго сумматора £2 получают сглаженное значение (оценку) первого приращения произведения дальности на радиальную скорость
в предыдущем обзоре. В итоге на выходе второго сумматора £2 получают сглаженное значение (оценку) первого приращения произведения дальности на радиальную скорость  в последнем обзоре, то есть в реальном масштабе времени.
в последнем обзоре, то есть в реальном масштабе времени.
Как видно из схемы, для определения путевой скорости, в отличие от прототипа, используются только результаты последнего измерения дальности и радиальной скорость и оценка произведения , полученная в предыдущем обзоре.
Для доказательства практического отсутствия систематических ошибок во втором варианте заявленного способа вычислим значение путевой скорости АЦ в соответствии с исходными данными, приведенными в таблице 1. Результаты вычислений сглаженных значений (оценок) первого приращения произведения дальности на радиальную скорость приведены в таблице 2.
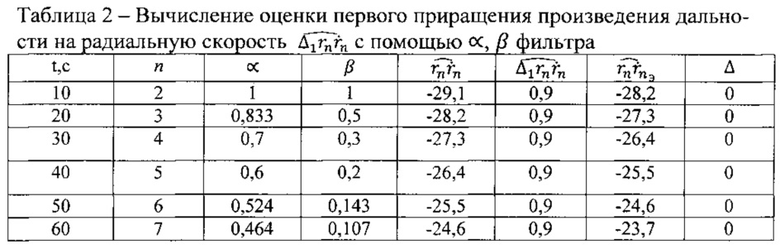
где  - сглаженное значение произведения дальности на радиальную скорость;
- сглаженное значение произведения дальности на радиальную скорость;
 - сглаженное значение первого приращения произведения дальности на радиальную скорость;
- сглаженное значение первого приращения произведения дальности на радиальную скорость;
 - экстраполированное значение произведения дальности на радиальную скорость;
- экстраполированное значение произведения дальности на радиальную скорость;
Δ - ошибка, то есть разность между текущим значением произведения дальности на радиальную скорость и его экстраполированным значением.
Как видно из таблицы 2, во всех обзорах путевая скорость вычисляется без систематических ошибок:  .
.
Результаты сравнения точности определения путевой скорости АЦ в первом и во втором вариантах заявленного способа приведены в таблице 3. Для этого вычислялись значения относительных СКО определения оценки первого приращения произведения дальности на радиальную скорость по формулам:
- для второго варианта:  [5, С. 362, таблица 7.3];
[5, С. 362, таблица 7.3];
- для первого варианта:  [1 С. 308, формула 4.63].
[1 С. 308, формула 4.63].
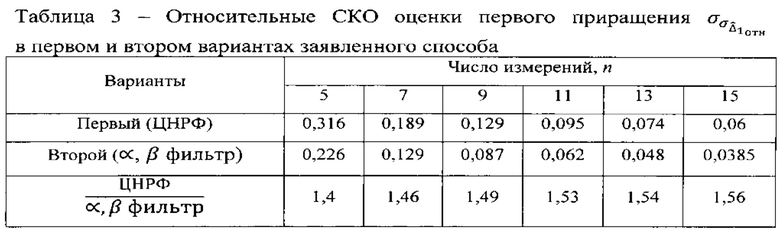
Как видно из таблицы точность оценивания путевой скорости во втором варианте с помощью , β фильтра повышается примерно в 1,5 раза по сравнению с первым вариантом с использованием ЦНРФ.
Таким образом, достигнут заявленный технический результат: уменьшение объема хранимых предыдущих измерений дальности и радиальной скорости, а также повышение точности определения путевой скорости неманеврирующей АЦ.
Список использованных источников
1. Кузьмин С.З. Цифровая обработка радиолокационной информации. М.: «Советское радио», 1967, 400 с.
2. Патент на полезную модель №152617 «Устройство радиолокационного определения путевой скорости неманеврирующей воздушной цели».
3. Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. М.: «Радио и связь», 1986, 352 с.
4. Вооружение ПВО и РЭС России. Альманах. М.: Издательство НО «Лига содействия оборонным предприятиям», 2011, 504 с.
5. Справочник по радиолокации / Под ред. М.И. Сколника. Книга 1. М.: «Техносфера», 2015, 672 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство определения путевой скорости неманеврирующего объекта по выборке произведений дальности на радиальную скорость | 2019 |
|
RU2741400C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПУТЕВОЙ СКОРОСТИ НЕМАНЕВРИРУЮЩЕЙ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ ОЦЕНОК ЕЕ РАДИАЛЬНОГО УСКОРЕНИЯ | 2021 |
|
RU2782527C1 |
| Способ и устройство определения курса неманеврирующей аэродинамической цели с использованием выборки квадратов дальности | 2016 |
|
RU2621692C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА ОБЪЕКТА НА ЛИНЕЙНОЙ ТРАЕКТОРИИ С ИСПОЛЬЗОВАНИЕМ ИЗМЕРЕНИЙ ЕГО РАДИАЛЬНОЙ СКОРОСТИ | 2019 |
|
RU2714884C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ НЕМАНЕВРИРУЮЩЕЙ АЭРОДИНАМИЧЕСКОЙ ЦЕЛИ ПО ВЫБОРКАМ ИЗМЕРЕНИЙ ДАЛЬНОСТИ | 2017 |
|
RU2669773C1 |
| СПОСОБ РАСПОЗНАВАНИЯ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ ОЦЕНОК ПЕРВОГО И ВТОРОГО ПРИРАЩЕНИЙ РАДИАЛЬНОЙ СКОРОСТИ | 2022 |
|
RU2793774C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНОЙ СКОРОСТИ БАЛЛИСТИЧЕСКОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2646854C2 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ НЕМАНЕВРИРУЮЩЕЙ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ ПО ФИКСИРОВАННОЙ ВЫБОРКЕ КВАДРАТОВ ДАЛЬНОСТИ | 2016 |
|
RU2626015C1 |
| Способ определения модуля скорости баллистического объекта с использованием выборки произведений дальности на радиальную скорость и устройство для его реализации | 2015 |
|
RU2634479C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ ОЦЕНОК ЕЕ РАДИАЛЬНОГО УСКОРЕНИЯ ПРИ НЕОДНОЗНАЧНЫХ ИЗМЕРЕНИЯХ РАДИАЛЬНОЙ СКОРОСТИ | 2021 |
|
RU2796965C1 |
Изобретение относится к радиолокации и может быть использовано для определения путевой скорости неманеврирующей аэродинамической цели преимущественно в радиолокационных станциях (РЛС) с грубыми измерениями угловых координат. Достигаемый технический результат изобретения - повышение точности определения путевой скорости. Для этого перемножают данные измерений дальности и радиальной скорости, определяют с помощью, цифрового нерекурсивного фильтра (ЦНРФ) оценку первого приращения произведения дальности на радиальную скорость за период обзора РЛС, делят оценку на период обзора РЛС, из полученного результата вычисляют квадратный корень. Устройство, реализующее способ, содержит последовательно соединенные умножитель дальности на радиальную скорость, ЦНРФ, делитель на период обзора, вычислитель квадратного корня. 2 н.п. ф-лы, 3 ил., 3 табл.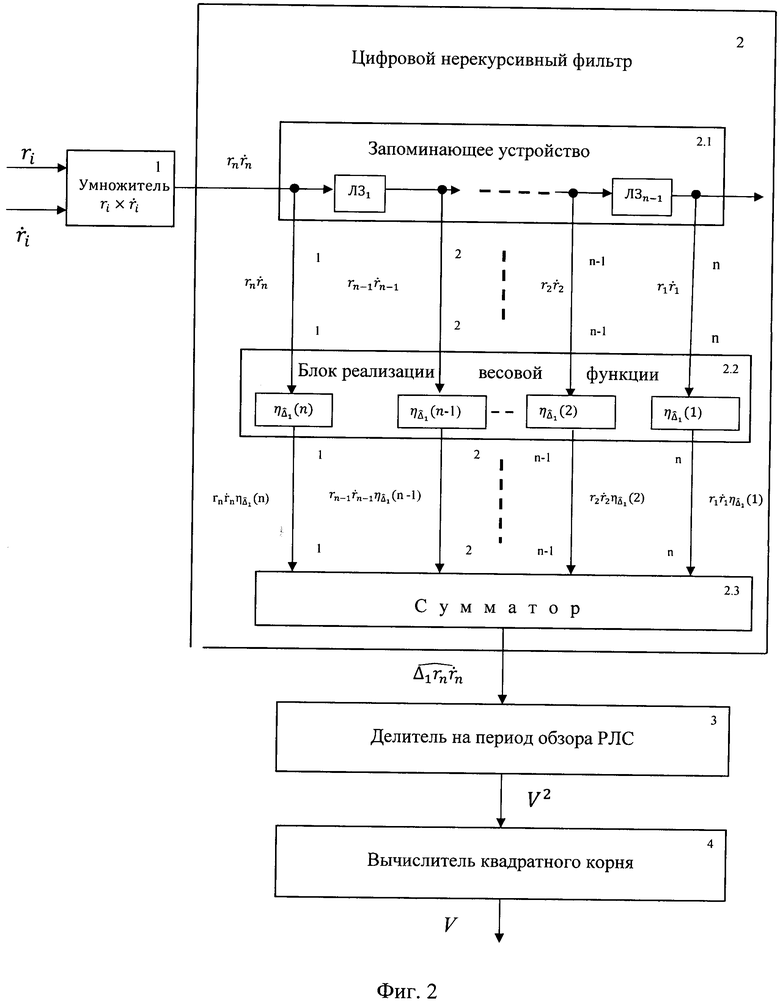
1. Способ радиолокационного определения путевой скорости неманеврирующей аэродинамической цели по выборке произведений дальности на радиальную скорость, включающий перемножение входных сигналов, формирование фиксированной выборки перемноженных сигналов, определение по этой выборке оценки приращения перемноженных сигналов за период обзора радиолокационной станции (РЛС), деление оценки на период обзора РЛС и вычисление квадратного корня, отличающийся тем, что в качестве входных сигналов используют данные измерений дальности и радиальной скорости, в результате перемножения входных сигналов получают произведения дальности на радиальную скорость, формируют фиксированную выборку произведений дальности на радиальную скорость, по этой фиксированной выборке определяют оценку первого приращения произведения дальности на радиальную скорость за период обзора РЛС, делят полученную оценку на период обзора РЛС и получают квадрат путевой скорости, из полученного результата вычисляют квадратный корень и определяют путевую скорость неманеврирующей аэродинамической цели.
2. Устройство радиолокационного определения путевой скорости неманеврирующей аэродинамической цели по выборке произведений дальности на радиальную скорость, содержащее последовательно соединенные умножитель входных сигналов и цифровой нерекурсивный фильтр, обеспечивающий формирование фиксированной выборки перемноженных сигналов и определение оценки приращения перемноженных сигналов за период обзора РЛС, а также делитель на период обзора РЛС и вычислитель квадратного корня, отличающееся тем, что на вход умножителя подают данные измерений дальности и радиальной скорости, выход цифрового нерекурсивного фильтра, обеспечивающего определение оценки первого приращения произведения дальности на радиальную скорость за период обзора РЛС, соединен с входом делителя на период обзора РЛС, выход которого соединен с входом вычислителя квадратного корня, на выходе которого, являющимся выходом заявленного устройства, определяют путевую скорость неманеврирующей аэродинамической цели.
| 0 |
|
SU152617A1 | |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ВРЕМЕНИ ОКОНЧАНИЯ АКТИВНОГО УЧАСТКА БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ | 2012 |
|
RU2510861C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ | 2004 |
|
RU2265233C1 |
| US 7154433 B1, 26.12.2006 | |||
| EP 1925948 A1, 28.05.2008 | |||
| WO 1925948 A1, 20.08.1998 | |||
| CN 103487801 A, 01.01.2014. | |||

