Изобретение относится к области радиолокации и может быть использовано в наземных радиолокационных станциях (РЛС) для определения путевой скорости (модуля вектора скорости) неманеврирующей аэродинамической цели и других объектов, движущихся по линейной траектории.
Известны способы и устройства измерения путевой скорости, в которых сначала определяют оценки скорости изменения горизонтальных прямоугольных координат  и
и  , а затем вычисляют путевую скорость по формуле:
, а затем вычисляют путевую скорость по формуле:  [1, С 314].
[1, С 314].
Известны устройства определения скорости изменения прямоугольных координат  и
и  с помощью цифрового нерекурсивного фильтра (ЦНРФ) путем оптимального взвешенного суммирования фиксированной выборки значений этих координат [1, С. 300-304].
с помощью цифрового нерекурсивного фильтра (ЦНРФ) путем оптимального взвешенного суммирования фиксированной выборки значений этих координат [1, С. 300-304].
Известны устройства определения скорости изменения прямоугольных декартовых координат  и
и  с помощью α, β фильтра путем последовательного оптимального сглаживания выборки нарастающего объема значений этих координат [1, С. 321-322].
с помощью α, β фильтра путем последовательного оптимального сглаживания выборки нарастающего объема значений этих координат [1, С. 321-322].
Основным недостатком этих устройств является низкая точность определения путевой скорости неманеврирующих объектов в РЛС с большими ошибками измерениями азимута, в частности в РЛС метрового диапазона волн.
Известен способ и устройство определения путевой скорости неманеврирующей воздушной цели путем оптимального взвешенного суммирования фиксированной выборки значений квадратов дальности с помощью ЦНРФ без использования измерений азимута [2, 3].
Основной недостаток способа и устройства.
Высокие требования к точности измерения дальности (среднеквадратические ошибки измерения дальности (СКО) σr≤15..25 м) для достижения преимущества по сравнению со способами оценивания скорости по выборкам значений прямоугольных координат. Такие точности проблематично реализовать в РЛС метрового диапазона волн с узкополосными зондирующими сигналами, формируемыми для обеспечения электромагнитной совместимости этих станций с радиоэлектронными системами связи, навигации, телевидения и другими устройствами.
Наиболее близким аналогом (прототипом) заявленного изобретения являются способ и устройство радиолокационного определения путевой скорости неманеврирующей цели по фиксированной выборке произведений дальности на радиальную скорость с помощью ЦНРФ [4].
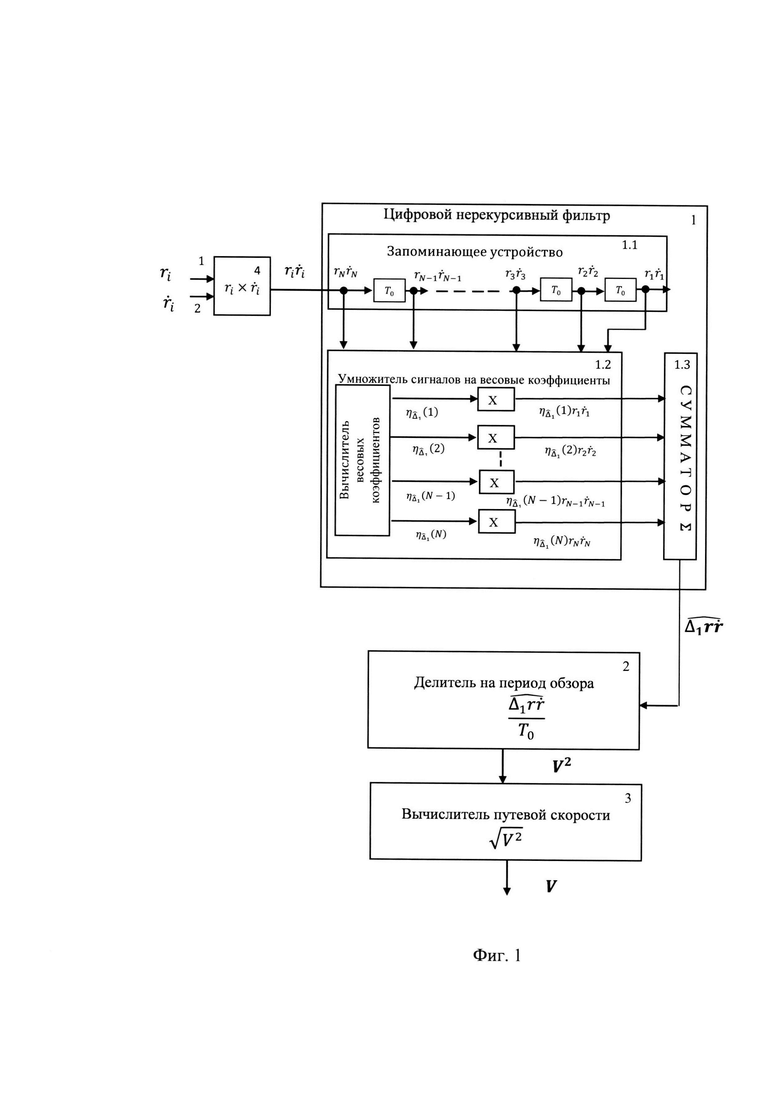
Сущность прототипа поясняется структурной схемой устройства определения путевой скорости, приведенной в фиг. 1. В умножителе (блок 1) перемножают данные измерений дальности и радиальной скорости и преобразуют их в цифровые входные сигналы ЦНРФ. В ЦНРФ (блок 2), содержащем запоминающее устройство (ЗУ), умножитель входных сигналов на весовые коэффициенты и сумматор, формируют фиксированную выборку из N взвешенных входных сигналов и определяют сглаженное значение (оценку) первого приращения произведения дальности на радиальную скорость за обзор  путем суммирования этих сигналов. При этом, при равноточных измерениях дальности и радиальной скорости весовые коэффициенты оценивания первого приращения
путем суммирования этих сигналов. При этом, при равноточных измерениях дальности и радиальной скорости весовые коэффициенты оценивания первого приращения  вычисляют по формуле:
вычисляют по формуле:  , где i - порядковый номер измерения или обзора в выборке [4, С. 151, формула 4.27]. Далее оценку
, где i - порядковый номер измерения или обзора в выборке [4, С. 151, формула 4.27]. Далее оценку  делят в блоке 3 на период обзора Т0. Из полученного результата вычисляют в блоке 4 квадратный корень и получают оценку, то есть сглаженное значение, путевой скорости:
делят в блоке 3 на период обзора Т0. Из полученного результата вычисляют в блоке 4 квадратный корень и получают оценку, то есть сглаженное значение, путевой скорости:
 .
.
Одним из недостатков прототипа является необходимость перемножения измеренных значений дальности и радиальной скорости в каждом обзоре.
Технический результат при создании заявленного изобретения заключается в расширении арсенала технических средств определения путевой скорости объектов, движущихся по линейной траектории, для чего впервые используются оценки радиального ускорения этих объектов, а также в упрощении заявленного изобретения за счет исключения операций перемножения дальности на радиальную скорость в каждом обзоре РЛС.
Указанный технический результат достигается тем, что в заявленном способе, как в прототипе, измеряют дальность и радиальную скорость цели через одинаковые промежутки времени, равные периоду обзора Т0 радиолокационной станции, и преобразуют результаты измерений во входные цифровые сигналы. Далее формируют фиксированную выборку входных сигналов, вычисляют весовые коэффициенты оценивания первого приращения  по формуле
по формуле  , затем умножают входные сигналы на эти весовые коэффициенты, суммируют взвешенные входные сигналы и определяют оценку первого приращения взвешенных входных сигналов за обзор, которую делят на период обзора.
, затем умножают входные сигналы на эти весовые коэффициенты, суммируют взвешенные входные сигналы и определяют оценку первого приращения взвешенных входных сигналов за обзор, которую делят на период обзора.
В отличие от прототипа, согласно изобретению, оценивают первое приращение  радиальной скорости цели в середине интервала сглаживания путем взвешенного суммирования измеренных значений
радиальной скорости цели в середине интервала сглаживания путем взвешенного суммирования измеренных значений  радиальной скорости:
радиальной скорости:
 .
.
Далее определяют оценку радиального ускорения цели  в середине интервала сглаживания путем деления оценки первого приращения на период обзора:
в середине интервала сглаживания путем деления оценки первого приращения на период обзора:
 .
.
Затем вычисляют путевую скорость по формуле:

где  - измеренное значение радиальной скорости цели в середине интервала сглаживания;
- измеренное значение радиальной скорости цели в середине интервала сглаживания;
rcp - измеренное значение дальности до цели в середине интервала сглаживания.
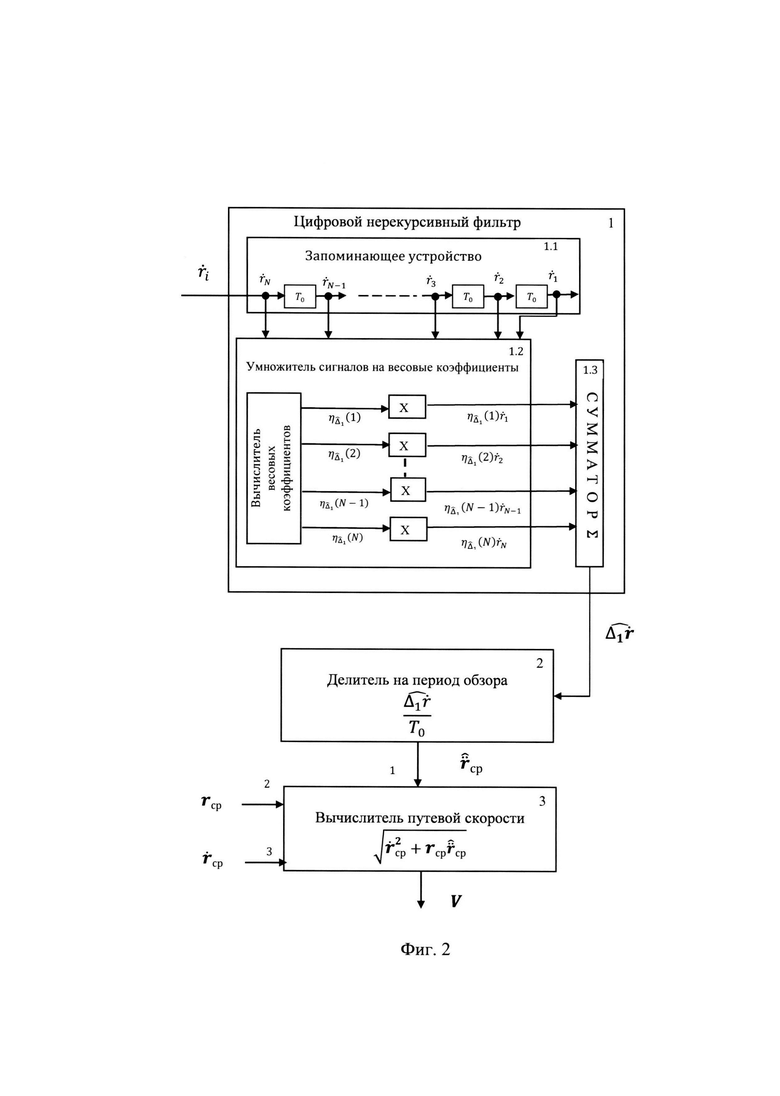
Заявленное устройство определения путевой скорости неманеврирующей цели с использованием оценок ее радиального ускорения, структурная схема которого приведена в фиг. 2, содержит так же, как устройство - прототип, последовательно соединенные цифровой нерекурсивный фильтр (блок 1), состоящий из последовательно соединенных запоминающего устройства (блок 1.1), умножителя на весовые коэффициенты (блок 1.2) и сумматора (блок 1.3), делитель на период обзора (блок 2) и вычислитель путевой скорости (блок 3), выход которого является выходом заявленного устройства.
В отличие от устройства - прототипа, согласно изобретению, на вход ЦНРФ (блок 1) подают данные измерений радиальной скорости, а на 2-й и 3-й входы вычислителя путевой скорости (блок 3) подают измеренные в середине интервала сглаживания значения дальности до цели и ее радиальной скорости.
За счет исключения операции перемножения дальности на радиальную скорость на входе ЦНРФ достигается упрощение схемы заявленного устройства.
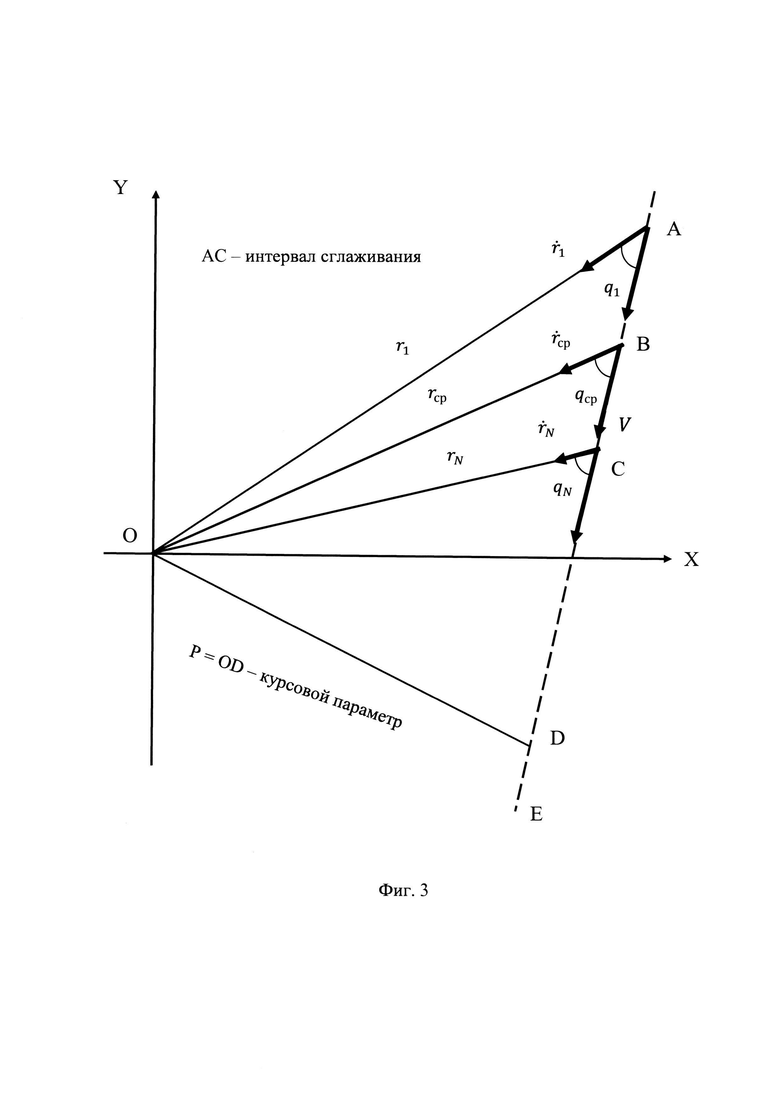
Для доказательства достоверности и эффективности заявляемого изобретения проведем сравнение точностей определения путевой скорости цели, летящей по линейной траектории, вид которой показан на фиг. 3, заявленным способом, прототипом и аналогом в РЛС типа «Резонанс-Н». Среднеквадратические ошибки (СКО) измерения координат и радиальной скорости в этой РЛС равны: по дальности σr=300 м, по азимуту σβ=1,5°, по радиальной скорости  [6, С. 356-361].
[6, С. 356-361].
В фиг. 3 использованы следующие условные обозначения:
АЕ - линейная траектория (пунктирная линия);
АС - интервал сглаживания;
Р=OD - курсовой параметр (траверзное расстояние) - минимальное удаление объекта от РЛС, находящейся в начале системы координат XOY;
OD - линия траверза;
V - путевая скорость объекта;
ri - наклонная дальность до объекта;
 - радиальная скорость объекта;
- радиальная скорость объекта;
 - курсовой угол между векторами скорости и радиальной скорости;
- курсовой угол между векторами скорости и радиальной скорости;
 ,
,  ,
,  - удаления объекта в начале, в середине и в конце интервала сглаживания от траверза.
- удаления объекта в начале, в середине и в конце интервала сглаживания от траверза.
Цель летит с постоянной скоростью 500 м/с и с курсовым параметром AD=P=100 км относительно РЛС. Длина интервала сглаживания АС равна 30 км. Радиальное ускорение цели определяется в середине интервала сглаживания в точке В на 30 секунде полета по фиксированной выборке из семи измерений радиальной скорости, произведенных с периодом Т0=10 с. Дальности от цели до траверза  , то есть до точки на траектории, наименее удаленной от РЛС, меньше курсового параметра. Исходные данные для расчетов приведены в таблице.
, то есть до точки на траектории, наименее удаленной от РЛС, меньше курсового параметра. Исходные данные для расчетов приведены в таблице.
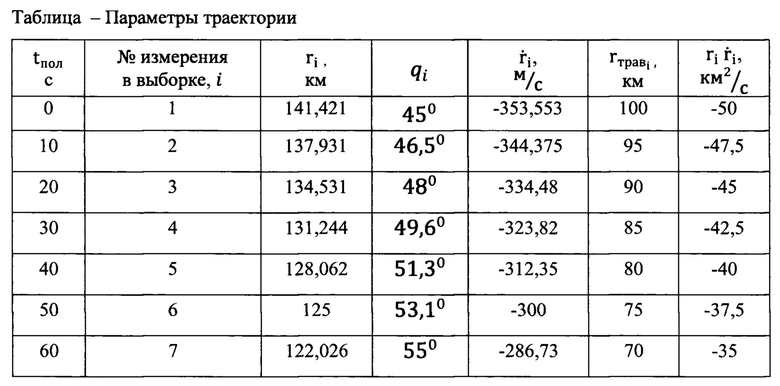
Радиальное ускорение цели определяется по фиксированной выборке из 7 измерений радиальной скорости, производимых через 10 с по формулам (2) и(3):

Путевая скорость, вычисленная по формуле (4), равна:

Как видно, в приведенном примере путевая скорость определяется с небольшим положительным смещением (+0,8 м/с). Это объясняется нелинейной зависимостью значений радиальной скорости от времени. При дальностях до траверза, превышающих курсовой параметр, эта нелинейность практически не проявляется и смещение оценок путевой скорости становится пренебрежимо малым.
В прототипе путевая скорость, вычисляемая по формуле (1), определяется без смещения, так как зависимость значений произведений дальности на радиальную скорость  от времени линейная:
от времени линейная:
 .
.
Точность определения путевой скорости в заявленном изобретении и в прототипе практически одинакова и зависит, в основном, от ошибок измерения радиальной скорости:
 .
.
В заявленном изобретении так же, как в прототипе, устранено влияние ошибок измерения азимута и существенно ослаблено влияние ошибок измерения дальности на точность определения путевой скорости.
В известных аналогах точность зависит, в основном, от ошибок измерения азимута σβ и величины курсового параметра Р. В приведенном примере она на порядок хуже, чем в заявленном изобретении:
 .
.
Таким образом, за счет использования оценок радиального ускорения достигается реализация заявленного технического результата, то есть расширяется арсенал технических средств определения путевой скорости объектов, движущихся по линейной траектории, путем разработки нового способа и устройства, в которых впервые используются оценки радиального ускорения. Кроме того, за счет исключения операции перемножения дальности на радиальную скорость на входе ЦНРФ достигается упрощение схемы заявленного устройства.
Список использованных источников
1. Кузьмин С.З. Цифровая обработка радиолокационной информации. М.: «Советское радио», 1967, 400 с.
2. Патент на изобретение №2559296 «Способ определения модуля скорости аэродинамической цели».
3. Патент на полезную модель №152617 «Устройство радиолокационного определения путевой скорости неманеврирующей воздушной цели».
4. Патент на изобретение №2644588 «Способ радиолокационного определения путевой скорости неманеврирующей аэродинамической цели по выборке произведений дальности на радиальную скорость и устройство для его реализации».
5. Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. М.: «Радио и связь», 1986, 352 с.
6. Вооружение ПВО и РЭС России. Альманах. М.: Издательство НО «Лига содействия оборонным предприятиям», 2011, 504 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство определения путевой скорости неманеврирующего объекта по выборке произведений дальности на радиальную скорость | 2019 |
|
RU2741400C2 |
| Способ радиолокационного определения путевой скорости неманеврирующей аэродинамической цели по выборке произведений дальности на радиальную скорость и устройство для его реализации | 2015 |
|
RU2644588C2 |
| Способ и устройство определения курса неманеврирующей аэродинамической цели с использованием выборки квадратов дальности | 2016 |
|
RU2621692C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ НЕМАНЕВРИРУЮЩЕЙ АЭРОДИНАМИЧЕСКОЙ ЦЕЛИ ПО ВЫБОРКАМ ИЗМЕРЕНИЙ ДАЛЬНОСТИ | 2017 |
|
RU2669773C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ОБЪЕКТА ПО ВЫБОРКАМ КВАДРАТОВ ДАЛЬНОСТИ | 2021 |
|
RU2781159C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНОЙ СКОРОСТИ БАЛЛИСТИЧЕСКОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2646854C2 |
| СПОСОБ РАСПОЗНАВАНИЯ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ ОЦЕНОК ПЕРВОГО И ВТОРОГО ПРИРАЩЕНИЙ РАДИАЛЬНОЙ СКОРОСТИ | 2022 |
|
RU2793774C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА ОБЪЕКТА НА ЛИНЕЙНОЙ ТРАЕКТОРИИ С ИСПОЛЬЗОВАНИЕМ ВЫБОРОК КВАДРАТОВ ДАЛЬНОСТИ | 2020 |
|
RU2753615C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА ОБЪЕКТА НА ЛИНЕЙНОЙ ТРАЕКТОРИИ С ИСПОЛЬЗОВАНИЕМ ИЗМЕРЕНИЙ ЕГО РАДИАЛЬНОЙ СКОРОСТИ | 2019 |
|
RU2714884C1 |
| Способ определения модуля скорости баллистического объекта с использованием выборки произведений дальности на радиальную скорость и устройство для его реализации | 2015 |
|
RU2634479C2 |
Изобретение относится к радиолокации и может быть использовано для определения путевой скорости неманеврирующих объектов преимущественно в радиолокационных станциях (РЛС) с большими ошибками измерения азимута. Технический результат изобретения заключается в расширении арсенала технических средств определения путевой скорости объектов, движущихся по линейной траектории. В заявленном способе оценивают первое приращение радиальной скорости  , делят его на период обзора Т0 и получают оценку радиального ускорения цели
, делят его на период обзора Т0 и получают оценку радиального ускорения цели  . Далее вычисляют путевую скорость по формуле:
. Далее вычисляют путевую скорость по формуле:  , где rcp и
, где rcp и  - дальность и радиальная скорость, измеренные в середине интервала сглаживания. Устройство содержит последовательно соединенные цифровой нерекурсивный фильтр оценивания
- дальность и радиальная скорость, измеренные в середине интервала сглаживания. Устройство содержит последовательно соединенные цифровой нерекурсивный фильтр оценивания  , делитель на Т0 и вычислитель путевой скорости. 2 н.п. ф-лы, 3 ил., 1 табл.
, делитель на Т0 и вычислитель путевой скорости. 2 н.п. ф-лы, 3 ил., 1 табл.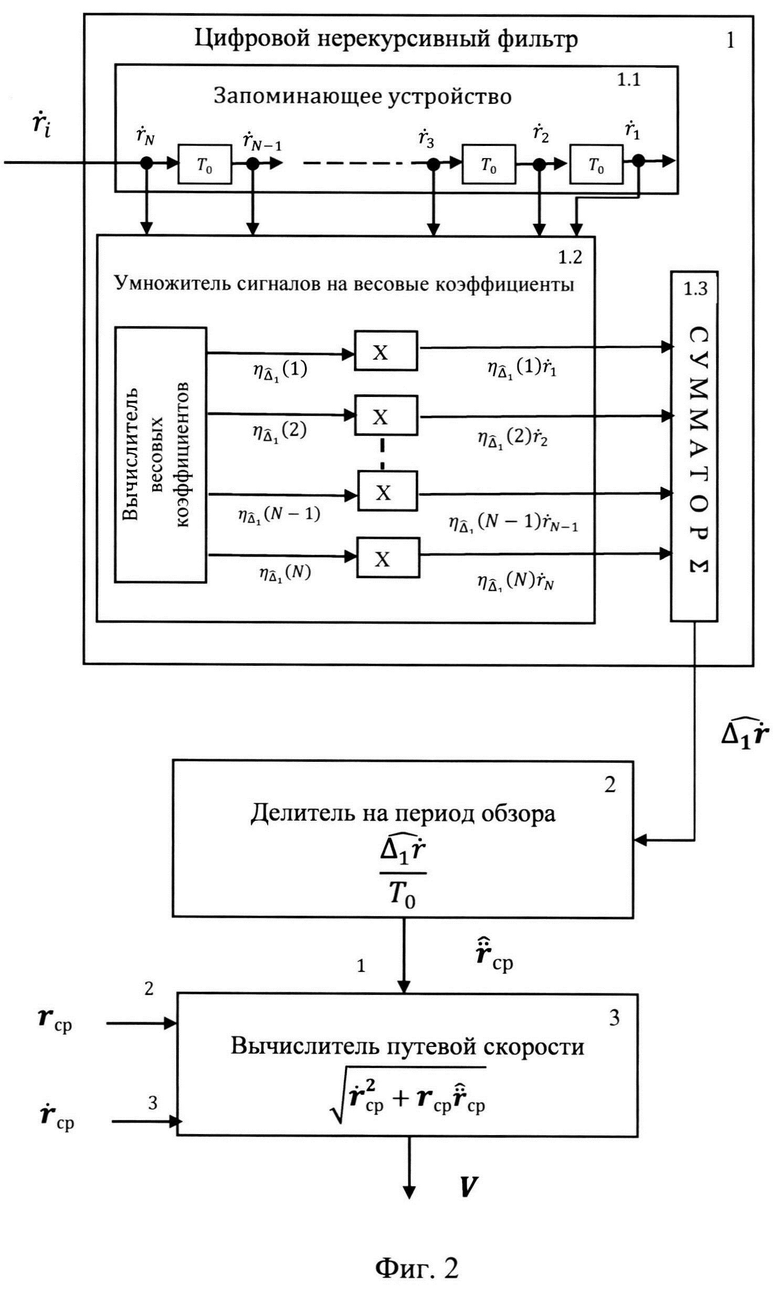
1. Способ определения путевой скорости неманеврирующей цели с использованием оценок ее радиального ускорения, заключающийся в том, что через одинаковые промежутки времени, равные периоду обзора Т0 радиолокационной станции, измеряют дальность и радиальную скорость цели и преобразуют данные измерений во входные цифровые сигналы, формируют фиксированную выборку из N входных сигналов и определяют сглаженную оценку первого приращения входного сигнала путем взвешенного суммирования этих сигналов с использованием весовых коэффициентов оценивания первого приращения  , вычисляемых по формуле:
, вычисляемых по формуле:  , полученную оценку делят на период обзора, отличающийся тем, что определяют оценку первого приращения радиальной скорости цели в середине интервала сглаживания
, полученную оценку делят на период обзора, отличающийся тем, что определяют оценку первого приращения радиальной скорости цели в середине интервала сглаживания  путем взвешенного суммирования фиксированной выборки измеренных значений радиальной скорости
путем взвешенного суммирования фиксированной выборки измеренных значений радиальной скорости  по формуле:
по формуле:  , эту оценку делят на период обзора Т0 и получают оценку радиального ускорения цели
, эту оценку делят на период обзора Т0 и получают оценку радиального ускорения цели  в середине интервала сглаживания
в середине интервала сглаживания  и вычисляют путевую скорость
и вычисляют путевую скорость  неманеврирующей цели по формуле:
неманеврирующей цели по формуле:  , где
, где  - измеренное значение радиальной скорости цели в середине интервала сглаживания, rcp - измеренное значение дальности до цели в середине интервала сглаживания.
- измеренное значение радиальной скорости цели в середине интервала сглаживания, rcp - измеренное значение дальности до цели в середине интервала сглаживания.
2. Устройство определения путевой скорости неманеврирующей цели с использованием оценок ее радиального ускорения, содержащее последовательно соединенные цифровой нерекурсивный фильтр, состоящий из последовательно соединенных запоминающего устройства, умножителя сигналов на весовые коэффициенты и сумматора, делитель на период обзора и вычислитель путевой скорости, выход которого является выходом заявленного устройства, отличающееся тем, что на вход цифрового нерекурсивного фильтра подают данные измерений радиальной скорости, а на второй и третий входы вычислителя путевой скорости подают значения дальности до цели и ее радиальной скорости, измеренные в середине интервала сглаживания.
| Способ радиолокационного определения путевой скорости неманеврирующей аэродинамической цели по выборке произведений дальности на радиальную скорость и устройство для его реализации | 2015 |
|
RU2644588C2 |
| 0 |
|
SU152617A1 | |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНОЙ СКОРОСТИ БАЛЛИСТИЧЕСКОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2646854C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ПОДВИЖНОЙ ЦЕЛИ ПРИ СГЛАЖИВАНИИ В ДЕКАРТОВЫХ КООРДИНАТАХ С УЧЕТОМ ИЗМЕРЕНИЙ РАДИАЛЬНОЙ СОСТАВЛЯЮЩЕЙ СКОРОСТИ | 2019 |
|
RU2724115C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПУТЕВОЙ СКОРОСТИ ВОЗДУШНОЙ ЦЕЛИ В НАЗЕМНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2004 |
|
RU2273033C2 |
| US 2021231791 A1, 29.07.2021 | |||
| US 3936824 A, 03.02.1976 | |||
| US 10705105 B2, 07.07.2020. | |||

