Способ одновременного динамического гашения колебаний объекта защиты по двум степеням свободы и устройство для его осуществления предназначены для реализации режимов одновременного ограничения движения объекта защиты по нескольким координатам и относятся к области решения задач динамики машин, оборудования и аппаратуры, работающих в условиях интенсивного динамического нагружения. Подобного рода задачи характерны для транспортных устройств различного назначения, технологических машин и защиты оборудования и приборов для реализации вибрационных технологических процессов и др. Известны способы и средства контроля, оценки и изменения динамического состояния объектов защиты, на которые действуют внутренние и внешние вибрационные возмущения. Вместе с тем вопросы управления динамическим состоянием по-прежнему являются актуальным направлением исследований, имеющим большое значение для обеспечения надежности, безопасности и конкурентоспособности современной техники.
При решении задач вибрационной защиты объектов широко используются физические эффекты и специальные устройства, реализующие режимы динамического гашения колебаний, что по существу связано с созданием в системе с несколькими степенями свободы при действии на отдельные элементы системы внешних возмущений условий для создания нейтрализующих динамических сил. Внешние возмущения в технических объектах имеют различную природу, в том числе они могут быть силовыми, то есть прикладываться непосредственно к массоинерционным элементам, а также кинематическими, когда возмущение передается через вибрирующую опорную поверхность или основание.
1. Известно изобретение [Алейников А.И., Иванов С.В. «Динамический гаситель колебаний», патент №2176042 С2, МПК F16F 15/02, приоритет 17.12.1999]. Динамический гаситель колебаний обладает приведенной массой, формируемой, по крайней мере, двумя маятниками, приводным устройством с валом для передачи вращения промежуточным элементам, связанным с валом. Гаситель снабжен системой управления, включающей: датчики параметров колебаний защищаемого объекта; электронный блок, обрабатывающий сигналы датчиков; сервопривод, управляемый электронным блоком; рычаг, муфту и тяги, передающие управляющее воздействие от сервопривода на промежуточные элементы. При этом промежуточные элементы выполнены в виде рычагов, кинематически связанных одной стороной с валом, а другой - с осями качания маятников. К недостаткам данного изобретения следует отнести сложность конструкции, большую нагрузку на объект защиты со стороны исполнительных механизмов, помимо этого система обладает одной степенью свободы, поэтому гашение колебаний происходит только по одной координате движения объекта.
2. Известен гаситель колебаний [Белый Д.М. «Динамический самонастраивающийся гаситель колебаний», патент №2230242 С1, МПК F16F 15/00, приоритет 18.10.2002]. Гаситель содержит жестко соединенный с защищаемым объектом стержень, ориентированный вдоль направления колебаний, и прикрепленный перпендикулярно к стержню упругий элемент с установленной на нем с возможностью относительного смещения и фиксации пригрузом. Участок на свободном конце стержня имеет резьбу. Масса выполнена в виде навернутой на вал гайки с шероховатой боковой поверхностью, а на защищаемом объекте по разные стороны от гайки вблизи ее боковой поверхности установлены с возможностью консольного закрепления и снятия две упругие пластины, центр масс одной из которых смещен относительно продольной оси пластины в сторону гайки, а другой - в противоположную от гайки сторону посредством жесткого крепления к соответствующим плоскостям пластин дополнительных масс. Участки обращенных к гайке поверхностей пластин в зоне расположения резьбового вала выполнены шероховатыми. К недостаткам данного изобретения следует отнести то, что износ трущихся пар со временем приводит к нестабильной работе гасителя колебаний, а также наличие только одного значения частоты динамического гашения колебаний для объекта.
3. К наиболее близкому техническому решению следует отнести устройство [Гаврилин А.Н., Крауиньш П.Я., Витко А.В., Рожков П.С. «Динамический самонастраивающийся гаситель колебаний», патент №98792 U1, МПК F16F 7/112, приоритет 01.07.2010]. Динамический самонастраивающийся гаситель колебаний содержит массу, присоединенную к защищаемому объекту посредством упругого элемента. Упругий элемент выполнен в виде балки, закрепленной консольно к защищаемому объекту через корпус и пневматический демпфер. При этом обладающий массой пригруз имеет Т-образную форму, в верхней части которой сделан сквозной паз для балки, а в нижней выполнено сквозное резьбовое отверстие для ходового винта. Массивный элемент имеет возможность перемещения за счет применения ходового винта и управляемого шагового двигателя. Недостатком данного устройства является невозможность одновременного гашения колебаний по двум координатам.
Целью предлагаемого изобретения является обеспечение одновременного гашения колебаний по двум координатам объекта защиты, состоящего из фрагментов, обладающих массами и совершающих независимые вертикальные колебания, вызванные движениями опорной поверхности.
Способ динамического гашения колебаний объекта с двумя степенями свободы, образующего механическую колебательную систему с двумя степенями свободы, состоящую из двух массоинерционных элементов, совершающих вертикальные поступательные колебательные движения, возбуждаемые вибрациями основания, передаваемыми на массоинерционные элементы через пружины, отличающийся тем, что параллельно упругим элементам в систему вводятся винтовые несамотормозящиеся механизмы, гайки-маховики которых закрепляются в шарикоподшипниковых опорах на движущихся массоинерционных элементах объекта защиты, а винтовые штоки обеспечивают динамические взаимодействия при относительных движениях, формируемых колебаниями опорных поверхностей и создающих в результате сложение динамических сил условия для реализации эффекта «блокирования» внешних воздействий по входам парциальных систем, формирующих при совпадении частот «блокирования» по двум входам режим динамического гашения колебаний одновременно по двум координатам движения объекта защиты.
Предлагаемое изобретение представляет собой способ динамического гашения колебаний объекта защиты одновременно по двум координатам. Предполагается, что объект защиты состоит из двух фрагментов с массами m1 и m2, которые могут двигаться по вертикали с координатами y1 и y2, как показано на фиг. 1.
Возмущение в системе возникает в результате гармонических колебаний опорной поверхности 1. В системе используются упругие элементы 10, 11, 12, обладающие соответственно жесткостями k1, k2, k3. Пружины k1 и k3 соединяют опорную поверхность I с элементами объекта защиты 8, 9 с массами m1 и m2. Пружина 11, имеющая жесткость k2, соединяет элементы 8, 9 между собой. Упругое соединение с жесткостями k1, k2, k3 сопровождается параллельным присоединением винтовых штоков 2, 3, 4, входящими во взаимодействие с гайками-маховиками 5, 6, 7. Винтовые штоки 2, 3, 4 и гайки-маховики 5, 6, 7 образуют несамотормозящиеся винтовые пары. Гайки-маховики находятся в специальных корпусах, обеспечивающих использованием шариковых подшипниковых соединений для уменьшения потерь на трение. Гайки-маховики 5, 6, 7 обладают моментами инерции J1, J2, J3 соответственно. В последующих расчетах, связанных с поступательными движениями массоинерционных элементов m1 и m2, моменты инерции J1, J2, J3 трансформируются в приведенные массы L1, L2, L3, каждая из которых с моментом инерции гайки-маховика связана соотношением
где 

 - радиусы винтов; α1, α2, α3 - углы подъема витков резьбы. Параметры винтовых механизмов обеспечивают режимы несамотормозящихся колебательных взаимодействий.
- радиусы винтов; α1, α2, α3 - углы подъема витков резьбы. Параметры винтовых механизмов обеспечивают режимы несамотормозящихся колебательных взаимодействий.
При периодических колебаниях опорной поверхности I, близких к гармоническим, возникающие динамические взаимодействия, создаваемые винтовыми несамотормозящимися механизмами или устройствами для преобразования движения (УПД) таковы, что внешние кинематические возмущения, привносят в систему переносные силы инерции. Эти силы создают условия для уравновешивания всех сил, действующих одновременно и на элемент 9 с массой m2, что реализует необходимый динамический эффект одновременного динамического гашения колебаний по двум элементам объекта защиты m1 и m2.
Теоретическое обоснование реализации динамического эффекта одновременного «обнуления» движения по двум координатам при кинематическом возмущении может быть проведено математическим моделированием.
1. Математическая модель исходной системы на фиг. 1 при малых колебаниях и гармоническом характере внешних сил и сосредоточенных параметров системы (то есть в линейной постановке задачи) может быть представлена в виде системы из двух обыкновенных дифференциальных уравнений второго порядка с постоянными коэффициентами:


2. Используя преобразования Лапласа при нулевых начальных условиях, преобразуем уравнения (1), (2) в операторную форму


где p=jω - комплексная переменная  значок «-» соответствует изображению переменной по Лапласу.
значок «-» соответствует изображению переменной по Лапласу.
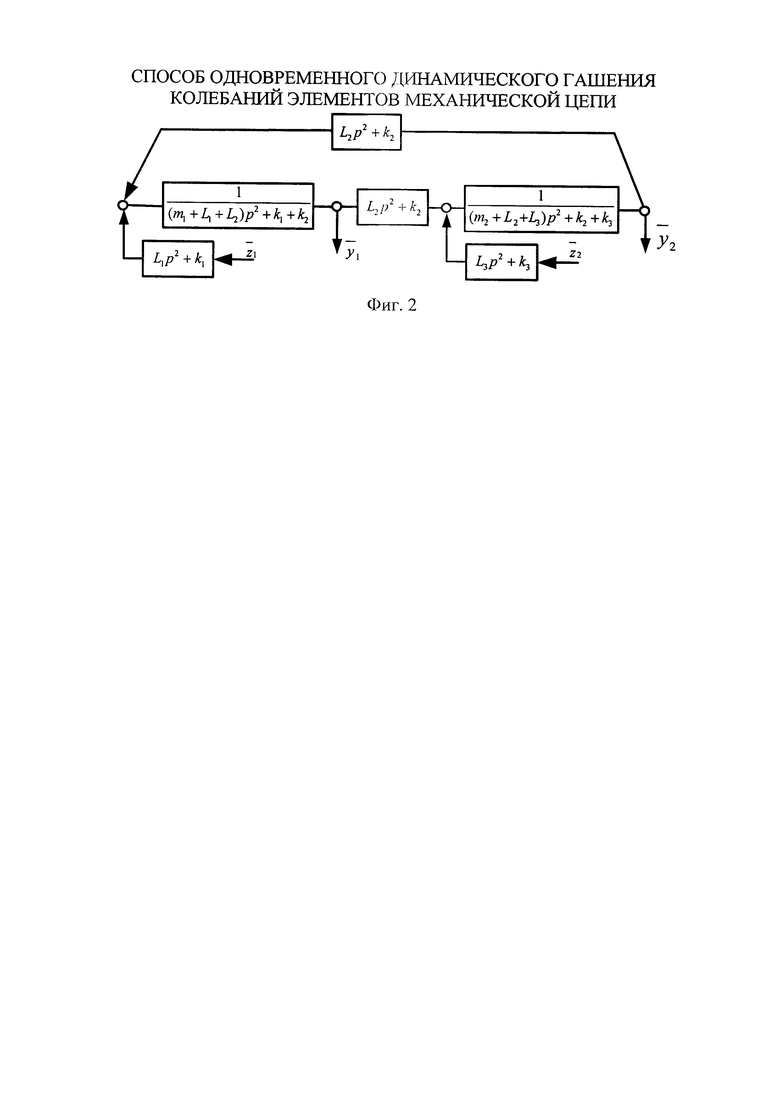
3. Структурная схема (или структурная математическая модель) эквивалентной в динамическом отношении системы автоматического управления имеет вид, как показано на фиг. 2. Используя структурную схему на фиг. 2, определяем передаточные функции системы по двум координатам  и
и 


где  - частотное характеристическое уравнение.
- частотное характеристическое уравнение.
При построении передаточных функций (5), (6) учитывалось то обстоятельство, что кинематическое возмущение z(t) формирует одновременно внешнее воздействие на каждую из парциальных систем.
4. Из структурной схемы на фиг. 2 следует, что входное воздействие  на каждый из входов проходит через звенья с передаточными функциями L1p2+k1 и L3p2+k3 соответственно. Так как p=jω, то при определенных значениях ω сигнал, проходя через звено, подвергается «обнулению».
на каждый из входов проходит через звенья с передаточными функциями L1p2+k1 и L3p2+k3 соответственно. Так как p=jω, то при определенных значениях ω сигнал, проходя через звено, подвергается «обнулению».
По первому входу такая частота составит

а по второму входу - соответственно

Если выполняется условие

то в системе реализуется режим динамического равновесия или режим динамического гашения колебаний одновременно по двум координатам y1 и y2. При этом в звеньях с операторами L1p2+k1 и L2p2+k2 на структурной схеме, приведенной на фиг. 2, реализуется уменьшение динамической жесткости до нуля, что «блокирует» прохождение внешнего воздействия на вход парциальной системы.
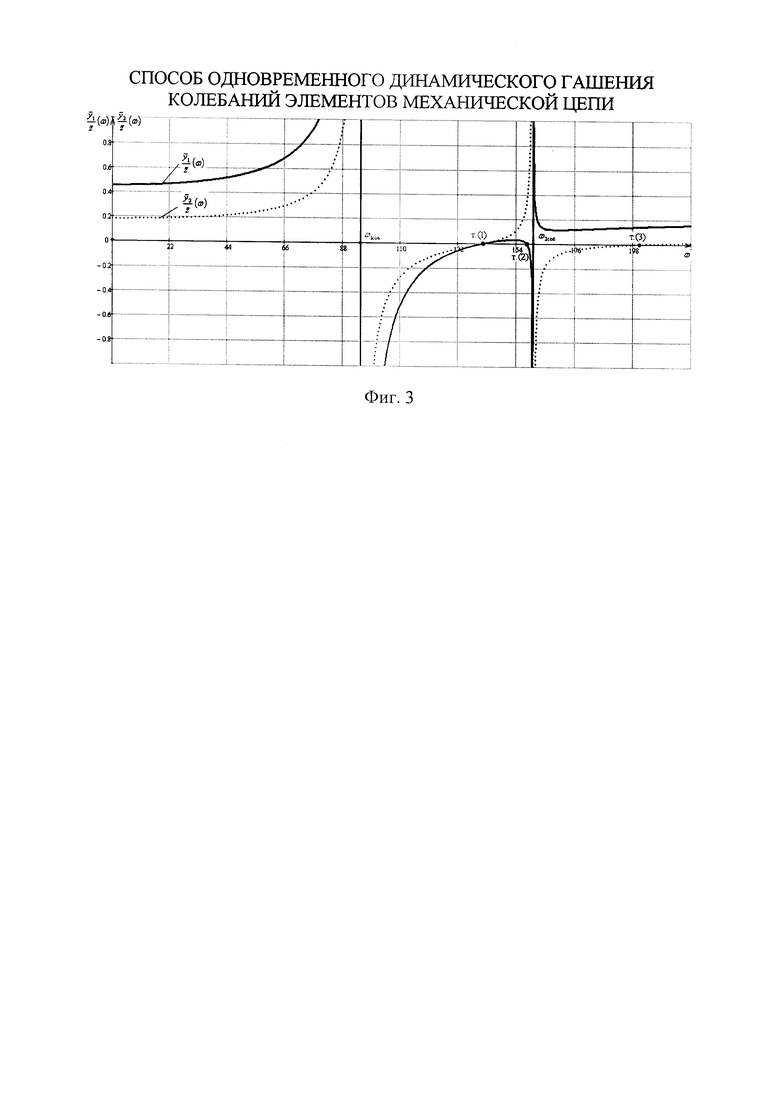
5. На фиг. 3 показаны амплитудно-частотные характеристики системы, полученные при вычислительном моделировании. При варьировании параметров системы, в частности, коэффициентами жесткостей k1 и k3 могут быть реализованы возможности обеспечения требуемых условий работы защищаемого объекта, состоящего из двух фрагментов. Численный эксперимент проводится при параметрах: m1=15 кг; m2=10 кг; k1=100 кН/м; k2=200 кН/м; k3=300 кН/м; L1=5 кг; L2=5 кг; L3=5 кг. Частота «обнуления» по двум координатам соответствует значениям ω12дин=141,42 1/с (точка (1) - на фиг. 3). Частота собственных колебаний составляет ω1соб=94,85 1/с; ω2соб=160,44 1/с. На фиг. 3 показано также, что в системе может быть реализован автономно режим динамического гашения колебаний по координате y1 на частоте ω2дин=158,1 1/с; (точка (2) на фиг. 3), а также - по координате y2 ω2дин=200 1/с (точка (3) на фиг. 3).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления формированием режимов динамического гашения колебаний и устройство для его реализации | 2017 |
|
RU2654276C1 |
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ | 2012 |
|
RU2498126C2 |
| СПОСОБ ОДНОВРЕМЕННОГО ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ ОБЪЕКТА ЗАЩИТЫ С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2662619C2 |
| СПОСОБ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ ТЯГОВОГО ДВИГАТЕЛЯ ЛОКОМОТИВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2654877C1 |
| Способ управления динамическим состоянием подвески транспортного средства и устройство для его реализации | 2018 |
|
RU2690135C1 |
| Способ настройки распределения амплитуд колебаний рабочего органа вибростенда и устройство для его осуществления | 2018 |
|
RU2695899C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМАМИ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2676116C2 |
| СПОСОБ УПРАВЛЕНИЯ И ИЗМЕНЕНИЯ ДИНАМИЧЕСКОГО СОСТОЯНИЯ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2696062C1 |
| Способ и устройство одновременного динамического гашения колебаний объекта защиты по двум степенями свободы | 2017 |
|
RU2700942C1 |
| Способ формирования, настройки и корректировки динамического состояния рабочих органов технологических вибрационных машин на основе введения дополнительных упругих связей и устройство для его реализации | 2019 |
|
RU2749364C2 |

Изобретение относится к области машиностроения. В систему параллельно упругим элементам вводят винтовые несамотормозящиеся механизмы. Гайки-маховики закрепляют в подшипниковых опорах в корпусах на движущихся массоинерционных элементах объекта защиты. Обеспечивают динамические взаимодействия при относительных движениях посредством винтовых штоков. Создают условия для реализации эффекта блокирования внешних воздействий по входам парциальных систем. Создают при совпадении частот блокирования по двум входам режим динамического гашения колебаний одновременно по двум координатам движения элементов объекта защиты. Достигается одновременное гашение колебаний объекта по двум координатам. 3 ил.
Способ динамического гашения колебаний объекта, образующего механическую колебательную систему с двумя степенями свободы, состоящую из двух массоинерционных элементов, совершающих вертикальные поступательные колебательные движения, возбуждаемые вибрациями основания, передаваемыми на массоинерционные элементы через пружины, отличающийся тем, что параллельно упругим элементам в систему вводятся винтовые несамотормозящиеся механизмы, гайки-маховики которых закрепляются в подшипниковых опорах в корпусах на движущихся массоинерционных элементах объекта защиты, а винтовые штоки обеспечивают динамические взаимодействия при относительных движениях, формируемых колебаниями опорных поверхностей и создающих в результате сложение динамических сил условия для реализации эффекта «блокирования» внешних воздействий по входам парциальных систем и создающих при совпадении частот блокирования по двум входам режим динамического гашения колебаний одновременно по двум координатам движения элементов объекта защиты.
| Способ получения борной кислоты | 1951 |
|
SU98792A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Дисковый питатель погрузчика | 1960 |
|
SU136112A1 |

