Вибрации машин оборудования характерны для процессов реализации производственных функций. Снижение уровня вибраций рассматривается в классе задач динамики, формулируемых как виброзащита и виброизоляция. Теоретические и прикладные аспекты вибрационных взаимодействий элементов машин рассматриваются в ряде монографий по теории механических колебаний.
Большое внимание в задачах вибрационной защиты уделяется поиску и разработке способов и средств динамического гашения колебаний. Известен ряд работ, посвященных развитию методологических позиций в задачах математического моделирования, теории и практике динамического гашения колебаний. Развиты методы поиска и разработки конструктивных решений, основанные на принципах активного гашения колебаний с применением управляемых дополнительных источников энергии. Вместе с тем вопросы расширения идей динамического гашения колебаний для объектов защиты, имеющих несколько степеней свободы, еще не получим должного внимания.
Предлагаемое изобретение относится к задачам разработки способов и средств динамического гашения колебаний, в которых ограничение развития колебательных процессов, вызванных внешними периодическими воздействиями, проходит целенаправленным образом одновременно на две координаты динамического состояния объекта защиты. Такие задачи возникают при разработке систем виброзащиты и виброизоляции транспортных средств, а также при разработке технологических машин, предназначенных для реализации вибрационных технологических процессов, где возникают вопросы корректировки структуры вибрационных полей.
Известен способ регулирования жесткости виброзащитной системы и устройство для его осуществления [Хоменко А.П., Елисеев С.В., Белокобыльский С.В., Упырь Р.Ю., Трофимов А.Н., Паршута Е.А., Сорин В.В. «Способ регулирования жесткости виброзащитной системы и устройство для его осуществления», патент 2440523 С2 RU, МПК F16F 15/04, приоритет 20.01.2012]. Способ регулирования жесткости заключается в установке пружины с положительной жесткостью и дополнительного упругого элемента в виде вращающихся масс. Вращение масс вокруг вертикальной оси создает центробежные силы, обеспечивающие изменение суммарной жесткости устройства. Вращение масс создает «отрицательную» жесткость, которая зависит от угловой скорости вращения. Упругие дополнительные устройства представлены в виде отдельных масс, соединенных шарнирно с помощью рычагов с основанием и объектом защиты в возможность создания центробежных инерционных сил вращения вокруг вертикальной оси.
К недостаткам данного изобретения можно отнести сложность настройки процесса и необходимость обеспечения вращения дополнительных масс вокруг вертикальной оси с применением источников энергии.
Известно устройство для гашения колебаний [Елисеев С.В., Савченко А.А., Трофимов А.Н., Паршута Е.А., Артюнин А.И., патент 133232 U1 RU, МПК F16F 7/10, F16F 15/04, приоритет от 10.10.2013]. Устройство для гашения колебаний, содержащее опорную пружину, дополнительную массу, звенья, кинематические пары, отличающееся тем, что объект защиты снабжен опорой в виде звена, жестко закрепленного одним концом на объекте защиты, другим концом шарнирно опирающегося на плечо рычага, имеющего в средней части точку опоры, на другом конце рычага расположена дополнительная масса с возможностью перемещения вдоль оси рычага на его конце.
Недостатком данного устройства является гашение колебаний объекта защиты только по одной координате.
Известно изобретение «Способ и устройство для динамического гашения колебаний» [Хоменко А.П., Елисеев С.В., Артюнин А.И., Кинаш Н.Ж., Большаков Р.С., Каимов Е.В., патент 2604250, МПК F16F 15/027, F16F 7/112, приоритет 10.12.2016]. Колебания гасят со стороны основания с помощью инерционных масс, расположенных на стыках рычагов. Обеспечивают расширение диапазона частот гашения колебаний за счет инерционных сил дополнительных масс, установленных в местах соединений нижних рычагов с регулируемым пневмоэлементом. Устройство содержит пружину, расположенную перпендикулярно основанию. Ромбовидная система рычагов содержит шарниры в местах соединения нижних и верхних рычагов. Пружина соединяет нижние рычаги ромбовидной системы и расположена параллельно основанию. Пневмоэлемент регулирует общую жесткость системы и расположен параллельно основанию. Концы пневмоэлемента соединены с продолжениями нижних рычагов. Дополнительные массы расположены в местах соединений и обеспечивают создание инерционных сил, действующих во встречном направлении относительно возмущающих сил основания на всех частотах заданного диапазона.
Недостатками данного изобретения являются сложность конструкции системы, а также гашение колебаний только по одной координате движения объекта защиты.
К наиболее близкому изобретению следует отнести способ настройки режимов работы виброзащитной системы и устройство для его осуществления [Хоменко А.П., Елисеев С.В., Каимов Е.В., Большаков Р.С., Кинаш Н.Ж., патент 2595733, МПК F16F 15/04, F16F 7/08, B60N 2/54, приоритет 13.11.2014]. Способ включает регулировку колебаний рычажной системы путем установки между объектом защиты и основанием пружины и шарнирно-рычажного механизма из двух звеньев, которые одним концом соединяют в центральном шарнире. К центральному шарниру закрепляют дополнительную массу, фиксируют показания акселерометров, обеспечивая настройку режимов работы виброзащитной системы. Виброзащитное устройство для настройки режимов работы виброзащитной системы содержит пружину, дополнительную массу и систему рычагов. Рычажная система выполнена из двух рычагов со скользящими по ним ползунами. Одним концом рычаги соединены между собой в центральном шарнире и снабжены дополнительной массой. Верхний рычаг другим концом соединен с объектом защиты, а нижний рычаг другим концом соединен с основанием. На рычагах помещены акселерометры, соединенные с блоком управления, которые настраивают угол между рычагами, изменяя массу виброзащитной системы. Изобретение позволяет упростить настройку виброзащитной системы с помощью виброзащитного устройства без применения дополнительных источников энергии.
К недостатку данного изобретения следует отнести сложный механизм регулирования динамического состояния виброзащитной системы.
В качестве прототипа может быть выбрано изобретение, где делается попытка ограничить движение по двум координатам. Затем идет описание предлагаемого способа и устройства.
Предлагаемый способ управления режимами динамического гашения колебаний основан на использовании эффектов изменения параметров приведенных масс и жесткостей в вибрационных взаимодействиях элементов виброзащитных систем, включающих в свой состав дополнительные механизмы в виде устройств для преобразования движения (УПД).
Способ динамического гашения колебаний объекта защиты, состоящего из двух частей с массами m1 и m2, совершающими вертикальные движения по координатам y1 и y2 с учетом упругих связей между элементами через пружины, создающими цепную схему соединения элементов при кинематическом возмущении со стороны общей вибрирующей опорной поверхности, отличающийся введением во все каскады исходной системы устройств для преобразования движения (УПД), представляющих собой несамотормозящиеся винтовые механизмы, в которых для гаек-маховиков УПД, опирающихся на опорную поверхность, предлагается использование настроечных механизмов из фрикционных колодок, прижимаемых к боковым поверхностям гаек-маховиков УПД с помощью сервоприводов, управляемых и обеспечивающих соблюдение определенного соотношения или соблюдения коэффициента связности между значениями приведенных масс УПД, опирающихся на вибрирующую поверхность, по сигналу со стороны системы управления, отслеживающей необходимые соотношения между одновременным достижением нулевых значений координат обеих регулируемых частей объекта защиты.
Устройство для реализации одновременного динамического гашения колебаний по двум координатам объекта защиты, состоящее из двух взаимодействующих между собой УПД, каждый из которых имеет одну опору на вибрирующей опорной поверхности, а вторую - соответственно на элементах объекта защиты, определяемых отдельными координатами при использовании для достижения необходимых параметров совместных движений по двум координатам настройки системы через соблюдение определенного соотношения между приведенными массами УПД, получаемыми путем создания на гайках-маховиках управляемых сил сопротивления, трансформирующихся в УПД в соответствующие изменения приведенных масс, чем достигается одновременное смещение уровня вибраций, передающихся со стороны основания одновременно по двум координатам движения объекта защиты.
Конструктивно-техническая форма такого устройства реализуется несамотормозящимся винтовым механизмом, имеющим ходовой винт и гайку-маховик, к которому прикладывается управляющий момент, изменяющий должным образом приведенную массу системы.
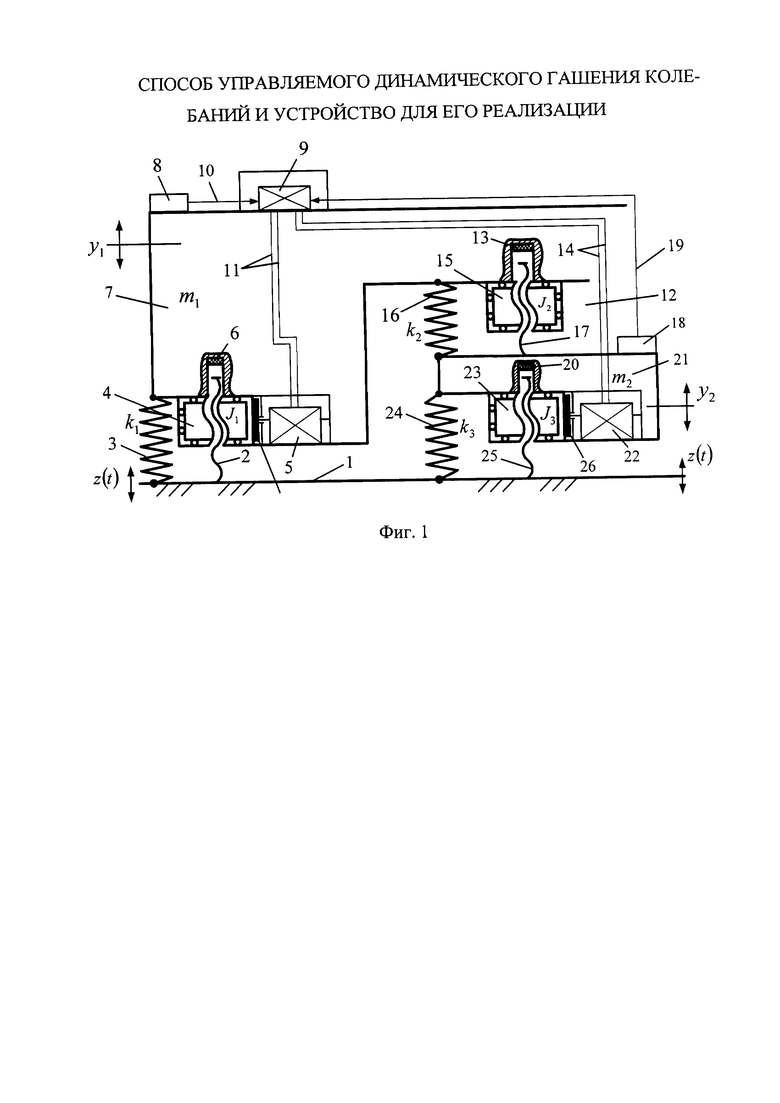
Рассматриваемая виброзащитная система состоит из двух массоинерционных элементов с массами m1 и m2, образующими объект защиты с двумя степенями свободы, описываемыми координатами y1 и y2 в системе координат, связанной с неподвижным базисом, как показано на фиг. 1. Система совершает малые колебания относительно положения статического равновесия. Массоинерционные элементы 7 и 12 с массами m1 и m2 соответственно опираются на опорную поверхность 1, совершающую периодические колебания. Опирание происходит через упругие элементы k1, k2, k3, обозначенные на фиг. 1 как элементы 3, 16 и 24 соответственно. Кроме того, связь между УПД для элемента m1 с опорной поверхностью 1 осуществляется через ходовой винт 2, который находится в соединении с гайкой-маховиком 4. С помощью сервопривода 5 тормозная колодка 27 прижимается к боковой цилиндрической поверхности гайки-маховика 4. Создаваемый при этом момент сил трения трансформируется в соответствующее изменение приведенной массы, величина которой проявляется через возвратно-крутильные угловые колебания гайки-маховика 4. Управление силой прижима тормозной колодки осуществляется по каналам связи 11 между сервоприводом 5 и блоком управления и питания 9. Для измерения параметров движения массоинерционного элемента m1 используется датчик 8, связанный с блоком 9 через канал 10. На массоинерционном элементе m1 размещен ограничитель 6, который не допускает развития больших отклонений по координате y1.
Между массоинерционными элементами 7 и 12 с массами m1 и m2 расположена пружина 16 с жесткостью k2, параллельно с которой работает УПД, состоящее из ходового винта 17 и гайки-маховика 15. Движение ходового винта 17 ограничено упругой прокладной 13.
Массоинерционный элемент с массой m2 через упругий элемент 24 с жесткостью k3 связан с опорной поверхностью 1. Параллельно упругому элементу 24 располагается УПД, состоящее из ходового винта 25, взаимодействующего с гайкой-маховиком 23, которая, в свою очередь, боковой цилиндрической поверхностью контактирует через фрикционную прокладку 26 с сервоприводом 22. Положение массоинерционного элемента 12 массой m2 контролируется датчиком 18, который связан 19 с блоком управления и питания 9 каналом связи. Сервопривод 22 соединен с блоком 9 каналами управления и передачи энергии 14. Ходовой винт 25 имеет упругий ограничитель хода 20.
Работа виброзащитной системы со сложным объектом защиты, состоящим из двух массоинерционных элементов 7 и 12 с массами m1 и m2, положение которых определяется координатами y1 и у2, происходит с участием системы управления (блок 9), учитывающей сигналы датчиков 8 и 18. После обработки сигналов и сравнения их с установленными границами смещений по координатам y1 и у2 включается программное устройство, определяющее необходимые поправки в значения приведенных масс L1 и L3, которые реализуются через работу сервоприводов 5 и 22, принимающих фрикционные прокладки 27 и 26 соответственно к боковым поверхностям элементов УПД 4 и 23.
В результате нескольких итераций установившийся режим работы виброзащитной системы настраивается на обеспечение заданных регламентов на параметры движения элементов виброзащитной системы одновременно по двум координатам y1 и у2, что соответствует определенному значению коэффициента, связанного между приведенными массами гаек-маховиков 4 и 23, что является настоечным параметром системы.
Теоретическое обоснование способа динамического гашения колебаний с учетом связности движения по координатам y1 и у2
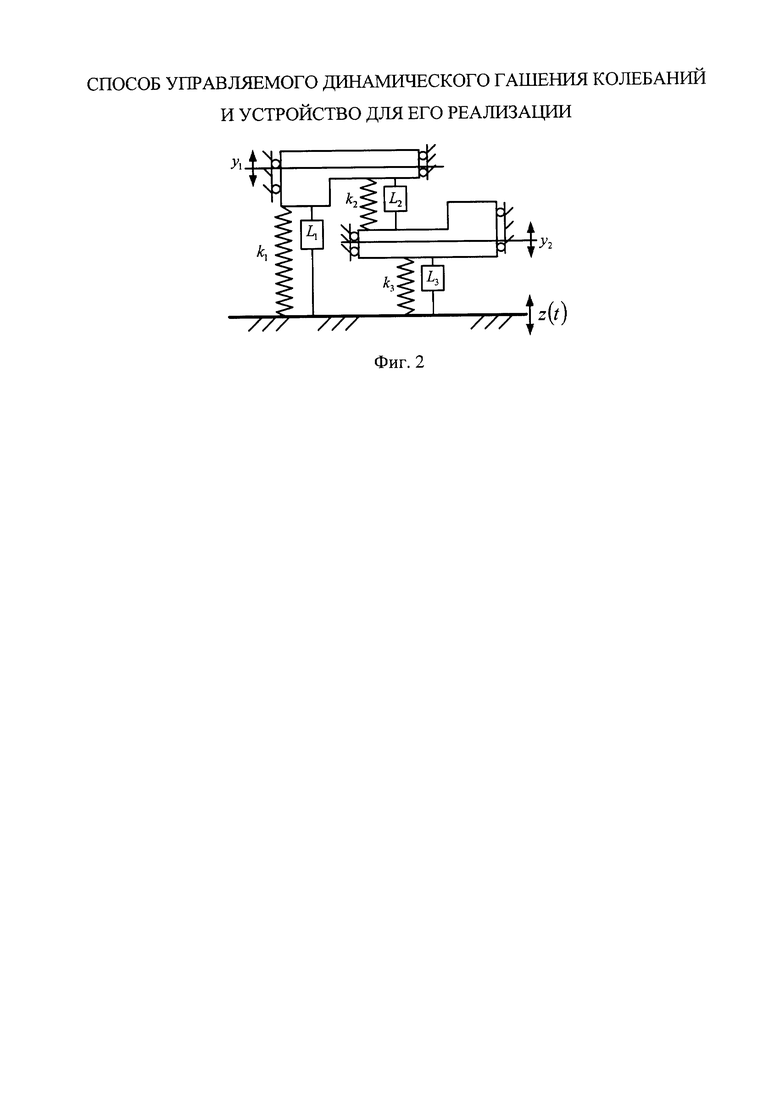
Принципиальная схема виброзащитной системы с упругими элементами и устройствами для преобразования движения приведена на фиг. 2.
Система, в которой реализуется способ управления динамическим состоянием одновременно по двум координатам, приведена на фиг. 1 и состоит из двух массоинерционных элементов m1 и m2, совершающих малые колебания y1 и у2 относительно положения статического равновесия. Внешние возмущения носят кинематической характер.
Используя приемы построения структурных математических моделей для исходной МКС, можно получить систему уравнений в операторной форме


где р=jω - комплексная переменная  ; значок «-» соответствует изображению переменной по Лапласу.
; значок «-» соответствует изображению переменной по Лапласу.
Передаточные функции системы при кинематическом гармоническом возмущении и условии z1=z2 имеют вид


где 
- характеристическое уравнение.
Отметим, что при построении передаточных функций системы учитывается одновременная передача воздействий на оба входа системы.
Парциальные частоты системы определяются выражениями

В рассматриваемой МКС (фиг. 2) возможно возникновение режимов динамического гашения колебаний по двум координатам, что определяется возможностями «обнуления» числителей передаточных функций (3), (4).
Для координаты  можно записать следующее уравнение для нахождения частот динамического гашения колебаний при кинематическом возмущении z1=z2=z.
можно записать следующее уравнение для нахождения частот динамического гашения колебаний при кинематическом возмущении z1=z2=z.

Уравнение (8) можно привести к форме биквадратного уравнения, полагая, что р2=-ω2=-γ, тогда

где R1=L1m2+L1L2+L2L3+L3L1, R2=L1(k2+k3)+k1(m2+L2+L3)+k3L2+k2L3, R3=k1(k2+k3)+k2k3.
Решение биквадратного уравнения (8) может иметь при определенном наборе параметров системы два вещественных положительных корня

В свою очередь, по координате 

или 
где  .
.
рассматриваются возможности изменения динамического состояния системы путем изменения соотношения между значениями L1 и L3. В данном случае полагается, что L3=α⋅L1, где α является коэффициентом связности между двумя внешними воздействиями по входам в парциальные системы. С учетом того, что

запишем


где

Введение коэффициента связности α между параметрами L1 и L3 изменяет системы (3), (4), стало быть и значения частот динамического гашения колебаний, определяемых уравнениями (9) и (12). При этом изменяется характеристическое частотное уравнение, то есть изменяются соответствующим образом частоты собственных колебаний.
С учетом коэффициента связности α составим, используя (14), уравнение для определения частоты динамического гашения 


Для определения частот собственных колебаний аналогичным образом из (16) получим

Из решения (19) могут быть получены значения частот собственных колебаний  и
и  при различных значениях α. Рассматриваются только те области изменения параметров системы, которые дают вещественные значения частот, поскольку частота колебаний является положительной величиной. Одновременно определяются парциальные частоты
при различных значениях α. Рассматриваются только те области изменения параметров системы, которые дают вещественные значения частот, поскольку частота колебаний является положительной величиной. Одновременно определяются парциальные частоты

Отметим, что парциальная частота  не зависит от α. При α=1 выражение (20) совпадает с выражением (6).
не зависит от α. При α=1 выражение (20) совпадает с выражением (6).
Построим диаграмму зависимостей 
 и
и  (Фиг. 3).
(Фиг. 3).
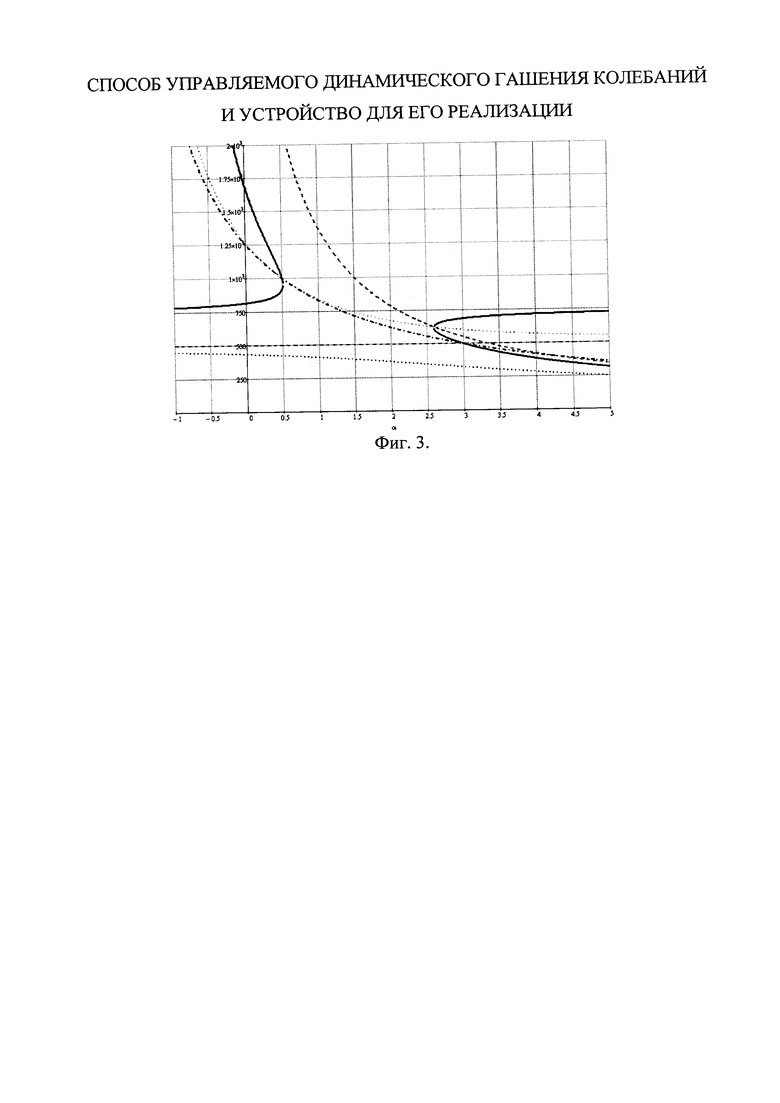
На фиг. 3 обозначены графики собственных частот МКС, определяются через характеристическое уравнение (19), что обозначено на фиг. 3 точечной линией
МКС, определяются через характеристическое уравнение (19), что обозначено на фиг. 3 точечной линией  . Парциальные частоты
. Парциальные частоты  на фиг. 3 представлены линиями, обозначенными штрих-пунктирными прямыми
на фиг. 3 представлены линиями, обозначенными штрих-пунктирными прямыми  На фиг. 3, кроме вышеупомянутых графиков, обозначены зависимости
На фиг. 3, кроме вышеупомянутых графиков, обозначены зависимости  которые определяется выражениями (17), (18) соответственно.
которые определяется выражениями (17), (18) соответственно.
Необходимые расчеты и построения выполнялись при следующих параметрах модельной задачи: m1=10 кг, m2=10 кг, k1=5000 Н, k2=10000 Н, k3=15000 Н, L1=10 кг, L2=10 кг. Кривая  представлен графиком в виде сплошной линии
представлен графиком в виде сплошной линии  кривая
кривая  отображается штриховой линией
отображается штриховой линией  на фиг. 3.
на фиг. 3.
В тт. (1) и (2) одновременно пересекаются два графика  и
и  , что соответствует случаю одновременного динамического гашения колебаний по двум координатам. В т. (1) характерным является то обстоятельство, что это происходит при одновременном совпадении с частотами собственных колебаний системы
, что соответствует случаю одновременного динамического гашения колебаний по двум координатам. В т. (1) характерным является то обстоятельство, что это происходит при одновременном совпадении с частотами собственных колебаний системы  Такой режим физически не может быть реализован и относится к числу неустойчивых форм движения, однако это не исключает возможностей использования режимов близких к режиму одновременного динамического гашения колебаний. В т. (2) пересечение соответствует режиму одновременного динамического гашения колебаний по двум координатам.
Такой режим физически не может быть реализован и относится к числу неустойчивых форм движения, однако это не исключает возможностей использования режимов близких к режиму одновременного динамического гашения колебаний. В т. (2) пересечение соответствует режиму одновременного динамического гашения колебаний по двум координатам.
Однако в т. (2) лежит пересечение двух графиков  и
и  . Отсюда получим значение α при этом случае
. Отсюда получим значение α при этом случае

При заданных значениях получим α=3.
При рассмотрении т. (3), которая лежит на пересечении трех графиков зависимостей  и графика
и графика  . Отметим, что для координаты y1 существует только одна частота динамического гашения, а для координаты у2 существует две частоты. Можно сделать вывод, что в данной ситуации в системе режим не может быть реализован и относится к числу неустойчивых форм движения.
. Отметим, что для координаты y1 существует только одна частота динамического гашения, а для координаты у2 существует две частоты. Можно сделать вывод, что в данной ситуации в системе режим не может быть реализован и относится к числу неустойчивых форм движения.
Характерным для рассматриваемой системы является зависимость частоты динамического гашения (кривая  ) от значения α. При α→∞, кривая
) от значения α. При α→∞, кривая  стремится к пределу
стремится к пределу  И также при α→∞, кривые
И также при α→∞, кривые  и
и  стремятся к пределу
стремятся к пределу  При заданных значениях получим а1=750 рад/с a2=500 рад/с.
При заданных значениях получим а1=750 рад/с a2=500 рад/с.
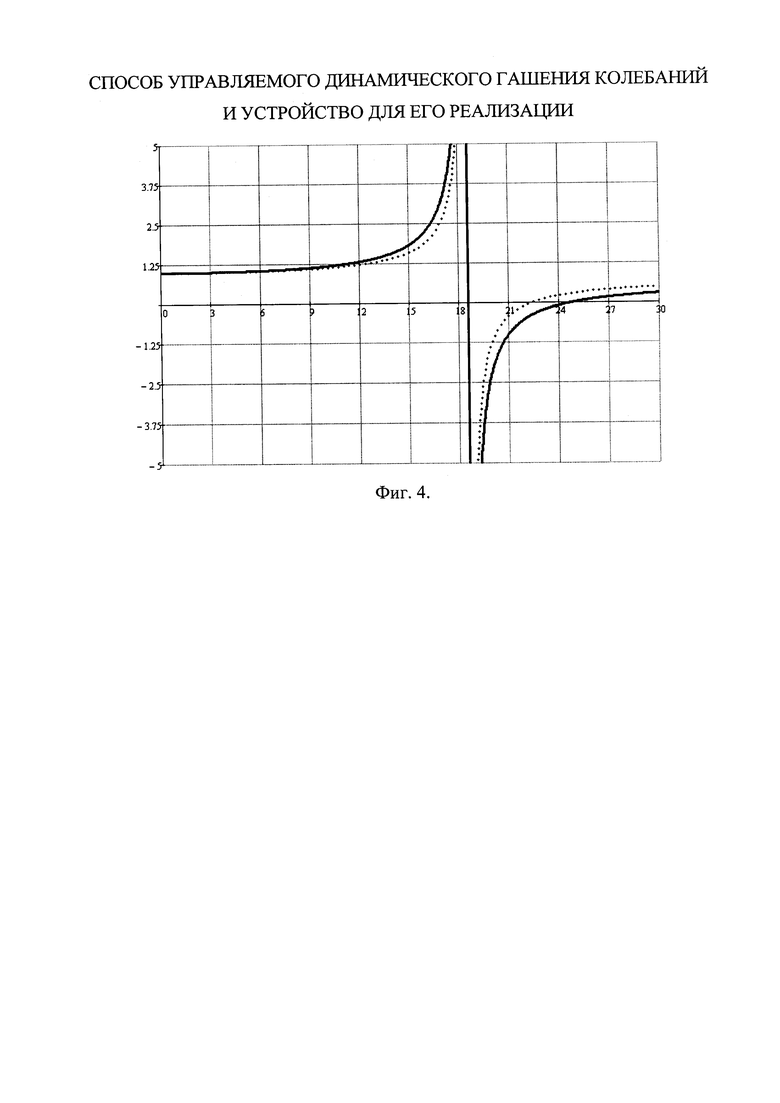
Построим графики амплитудно-частотных характеристик (АЧХ) в т. (1), соответственно при значении α=2,6.
При этом случае для каждой координаты y1 и у2 существует только одна частота динамического гашения (точка пересечения оси абсцисс (т. 1') и (т. 2')), и они одновременно не пересекают.
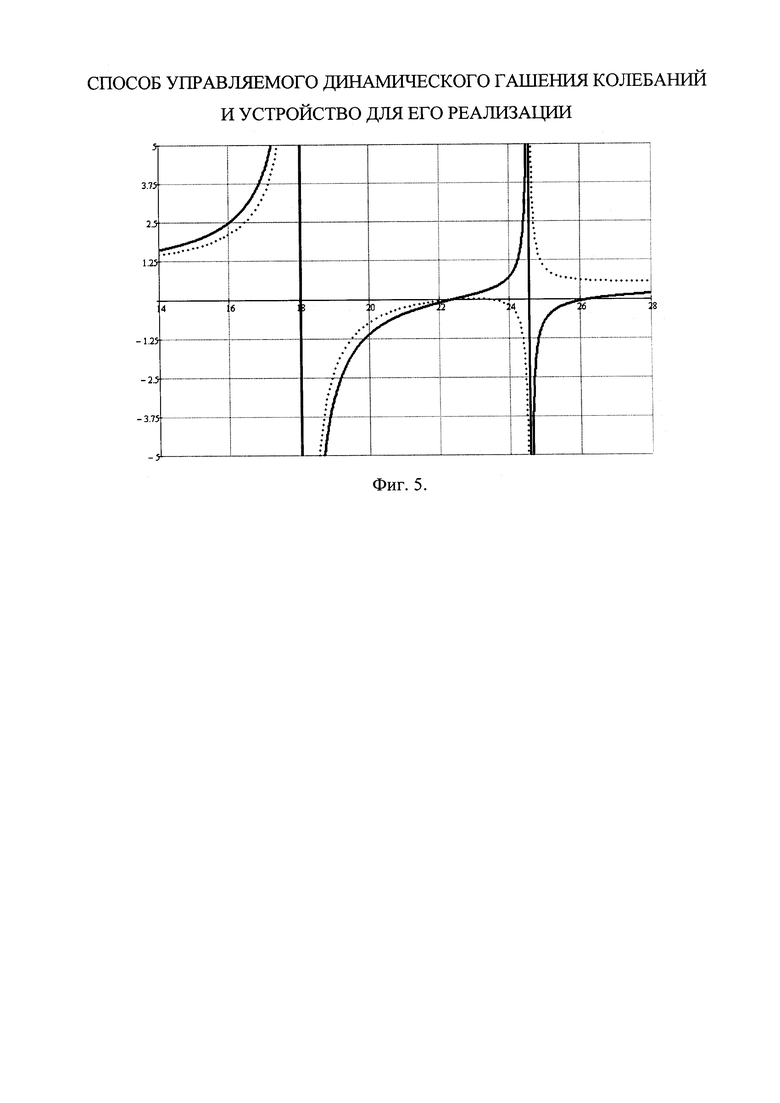
Построим графики амплитудно-частотных характеристик (АЧХ) в т. (2) соответственно при значении α=3. Вид динамических режимов определяется возможностями одновременного обнуления координат  и
и  при определенных частотах. На фиг. 5 показаны графики АЧХ
при определенных частотах. На фиг. 5 показаны графики АЧХ  и
и  , которые одновременно пересекает ось абсцисс на одной и той же частоте (т. (1')).
, которые одновременно пересекает ось абсцисс на одной и той же частоте (т. (1')).
Каждая из АЧХ  и
и  имеет в общем случае по две частоты динамического гашения. Но одновременное динамическое гашение по двум координатам происходит только на частоту ω12дин ((т. 1') на оси абсцисс).
имеет в общем случае по две частоты динамического гашения. Но одновременное динамическое гашение по двум координатам происходит только на частоту ω12дин ((т. 1') на оси абсцисс).
Во втором диапазоне от ω1соб до ω2соб график  пересекает ось абсцисс еще в т. (2''). Значение на оси абсцисс показывает частоту динамического гашения для координаты у2. В третьем диапазоне от ω2соб→∞ график
пересекает ось абсцисс еще в т. (2''). Значение на оси абсцисс показывает частоту динамического гашения для координаты у2. В третьем диапазоне от ω2соб→∞ график  пересекает оси абсцисс еще в т. (2'). Значение на оси абсцисс показывает частоту динамического гашения для координаты у1.
пересекает оси абсцисс еще в т. (2'). Значение на оси абсцисс показывает частоту динамического гашения для координаты у1.
В области высоких частот АЧХ  стремится к пределу
стремится к пределу  , который определяется из выражения (14) при p→∞. Аналогично АЧХ
, который определяется из выражения (14) при p→∞. Аналогично АЧХ  стремится при p→∞ к пределу
стремится при p→∞ к пределу  определяющемуся из выражения (15).
определяющемуся из выражения (15).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОДНОВРЕМЕННОГО ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ ЭЛЕМЕНТОВ МЕХАНИЧЕСКОЙ ЦЕПИ | 2016 |
|
RU2648661C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМАМИ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2676116C2 |
| СПОСОБ ОДНОВРЕМЕННОГО ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ ОБЪЕКТА ЗАЩИТЫ С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2662619C2 |
| СПОСОБ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ ТЯГОВОГО ДВИГАТЕЛЯ ЛОКОМОТИВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2654877C1 |
| Способ управления динамическим состоянием подвески транспортного средства и устройство для его реализации | 2018 |
|
RU2690135C1 |
| Способ настройки распределения амплитуд колебаний рабочего органа вибростенда и устройство для его осуществления | 2018 |
|
RU2695899C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ | 2015 |
|
RU2604250C2 |
| Способ управления структурой вибрационного поля вибрационной технологической машины на основе использования эффектов динамического гашения и устройство для его осуществления | 2016 |
|
RU2624757C1 |
| Способ динамического гашения колебаний технического объекта и устройство для его реализации | 2017 |
|
RU2668887C1 |
| Способ настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2718177C1 |
Группа изобретений относится к области машиностроения. Создают цепную схему соединения элементов при кинематическом возмущении со стороны общей вибрирующей опорной поверхности. Вводят во все каскады исходной системы устройства для преобразования движения, представляющие собой несамотормозящиеся винтовые механизмы. Используют настроечные механизмы из фрикционных колодок, прижимаемых к боковым поверхностям гаек-маховиков посредством сервоприводов. Управляют и обеспечивают соблюдение связности между значениями приведенных масс, опирающихся на вибрирующую поверхность, по сигналу со стороны системы управления. Устройство содержит взаимодействующие между собой устройства для преобразования движения. Созданные на гайках-маховиках управляемые силы сопротивления трансформируются в устройства для преобразования движения в соответствующие изменения приведенных масс. Достигается упрощение механизма регулирования динамического состояния виброзащитной системы, гашение колебаний одновременно по двум координатам движения объекта защиты. 2 н.п. ф-лы, 5 ил.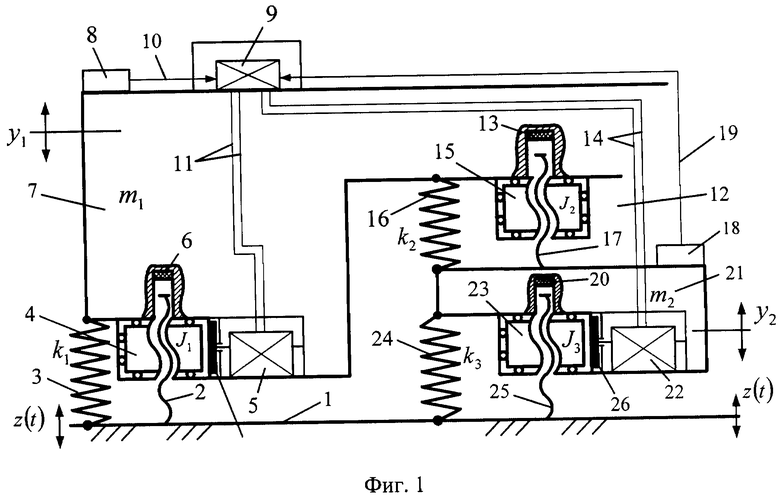
1. Способ динамического гашения колебаний объекта защиты, состоящего из двух частей с массами m1 и m2, совершающими вертикальные движения по координатам y1 и y2 с учетом упругих связей между элементами через пружины, создающими цепную схему соединения элементов при кинематическом возмущении со стороны общей вибрирующей опорной поверхности, отличающийся введением во все каскады исходной системы устройств для преобразования движения (УПД), представляющих собой несамотормозящиеся винтовые механизмы, в которых для гаек-маховиков УПД, опирающихся на опорную поверхность, предлагается использование настроечных механизмов из фрикционных колодок, прижимаемых к боковым поверхностям гаек-маховиков УПД с помощью сервоприводов, управляемых и обеспечивающих соблюдение определенного соотношения или соблюдения коэффициента связности между значениями приведенных масс УПД, опирающихся на вибрирующую поверхность, по сигналу со стороны системы управления, отслеживающей необходимые соотношения между одновременным достижением нулевых значений координат обеих регулируемых частей объекта защиты.
2. Устройство для реализации одновременного динамического гашения колебаний по двум координатам объекта защиты, состоящее из двух взаимодействующих между собой УПД, каждый из которых имеет одну опору на вибрирующей опорной поверхности, а вторую - соответственно на элементах объекта защиты, определяемых отдельными координатами при использовании для достижения необходимых параметров совместных движений по двум координатам настройки системы через соблюдение определенного соотношения между приведенными массами УПД, получаемыми путем создания на гайках-маховиках управляемых сил сопротивления, трансформирующихся в УПД в соответствующие изменения приведенных масс, чем достигается одновременное смещение уровня вибраций, передающихся со стороны основания одновременно по двум координатам движения объекта защиты.
| СПОСОБ НАСТРОЙКИ РЕЖИМОВ РАБОТЫ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2595733C2 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Дисковый питатель погрузчика | 1960 |
|
SU136112A1 |

