Способ одновременного динамического гашения колебаний объекта защиты по двум степеням свободы и устройство для его осуществления предназначены для реализации режимов одновременного ограничения движения объекта защиты по нескольким координатам и относятся к области решения задач динамики машин, оборудования и аппаратуры, работающих в условиях интенсивного динамического нагружения. Подобного рода задачи характерны для транспортных устройств различного назначения, технологических машин и защиты оборудования и приборов для реализации вибрационных технологических процессов и др. Известны способы и средства контроля, оценки и изменения динамического состояния объектов защиты, на которые действуют внутренние и внешние вибрационные возмущения. Вместе с тем вопросы управления динамическим состоянием по-прежнему являются актуальным направлением исследований, имеющим большое значение для обеспечения надежности, безопасности и конкурентоспособности современной техники.
При решении задач вибрационной защиты объектов широко используются физические эффекты и специальные устройства, реализующие режимы динамического гашения колебаний, что по существу связано с созданием в системе с несколькими степенями свободы при действии на отдельные элементы системы внешних возмущений условий для создания нейтрализующих динамических сил.
Внешние возмущения в технических объектах имеют различную природу, в том числе, они могут быть силовыми, то есть прикладываться непосредственно к массоинерционным элементам, а также - кинематическими, когда возмущение передается через вибрирующую опорную поверхность или основание.
Известно изобретение [Алейников А.И., Иванов С.В., «Динамический гаситель колебаний», патент №2176042 С2, МПК F16F 15/02, приоритет 17.12.1999]. Динамический гаситель колебаний обладает приведенной массой, формируемой, по крайней мере, двумя маятниками, приводным устройством с валом для передачи вращения промежуточным элементам, связанным с валом. Гаситель снабжен системой управления, включающей: датчики параметров колебаний защищаемого объекта; электронный блок, обрабатывающий сигналы датчиков; сервопривод, управляемый электронным блоком; рычаг, муфту и тяги, передающие управляющее воздействие от сервопривода на промежуточные элементы. При этом промежуточные элементы выполнены в виде рычагов, кинематически связанных одной стороной с валом, а другой - с осями качания маятников.
К недостаткам данного изобретения следует отнести сложность конструкции, большую нагрузку на объект защиты со стороны исполнительных механизмов, помимо этого система обладает одной степенью свободы, поэтому гашение колебаний происходит только по одной координате движения объекта.
Известен гаситель колебаний [Белый Д.М. «Динамический самонастраивающийся гаситель колебаний», патент №2230242 С1, МПК F16F 15/00, приоритет 18.10.2002]. Гаситель содержит жестко соединенный с защищаемым объектом стержень, ориентированный вдоль направления колебаний, и прикрепленный перпендикулярно к стержню упругий элемент с установленной на нем с возможностью относительного смещения и фиксации пригрузом. Участок на свободном конце стержня имеет резьбу. Масса выполнена в виде навернутой на вал гайки с шероховатой боковой поверхностью, а на защищаемом объекте по разные стороны от гайки вблизи ее боковой поверхности установлены с возможностью консольного закрепления и снятия две упругие пластины, центр масс одной из которых смещен относительно продольной оси пластины в сторону гайки, а другой - в противоположную от гайки сторону посредством жесткого крепления к соответствующим плоскостям пластин дополнительных масс. Участки обращенных к гайке поверхностей пластин в зоне расположения резьбового вала выполнены шероховатыми.
К недостаткам данного изобретения следует отнести то, что износ трущихся пар со временем приводит к нестабильной работе гасителя колебаний, а также наличие только одного значения частоты динамического гашения колебаний для объекта.
К наиболее близкому техническому решению следует отнести устройство [Гаврилин А.Н., Крауиньш П.Я., Витко А.В., Рожков П.С. «Динамический самонастраивающийся гаситель колебаний», патент №98792 U1, МПК F16F 7/112, приоритет 01.07.2010]. Динамический самонастраивающийся гаситель колебаний содержит массу, присоединенную к защищаемому объекту посредством упругого элемента. Упругий элемент выполнен в виде балки, закрепленной консольно к защищаемому объекту через корпус и пневматический демпфер. При этом обладающий массой пригруз имеет Т-образную форму, в верхней части которой сделан сквозной паз для балки, а в нижней выполнено сквозное резьбовое отверстие для ходового винта. Массивный элемент имеет возможность перемещения за счет применения ходового винта и управляемого шагового двигателя.
Недостатком данного устройства является невозможность одновременного гашения колебаний по двум координатам.
Целью предлагаемого изобретения является обеспечение одновременного гашения колебаний по двум координатам объекта защиты.
Способ динамического гашения колебаний в виброзащитной системе с объектом защиты с двумя степенями свободы, содержащей механизмы для преобразования движения, вызванного вибрациями опорной поверхности, обеспечивающий одновременное достижение гашения колебаний по двум координатам, определяющим его положение, отличающийся тем, что формируется и используется динамический эффект «блокирования» внешних сил с помощью создания условий непроходимости внешнего воздействия к точкам контакта объекта защиты и упругих элементов, находящихся в соединениях между опорной поверхностью и объектом.
Устройство для реализации динамического гашения колебаний объекта, установленного на упругих опорах в виде пружин и содержащих в своем составе рычажные механизмы для преобразования движения, отличающееся тем, что рычажные механизмы устанавливаются на каждой из опор объекта защиты и имеют на свободных концах дополнительные пригрузы, которые обладают возможностями перемещения по плечу рычага для обеспечения возможности достижения определенных значений так называемой частоты «блокировки» внешней силы по двум опорам, чем достигается режим динамического гашения колебаний объекта защиты одновременно по двум координатам.
Устройство автоматического поддержания режима динамического гашения колебаний объекта одновременно по двум координатам, состоящее из виброизмерительных устройств, представляющих собой датчики учета изменения координат движения объекта защиты и основания, блоков обработки информации, источников энергии и сервоприводов в виде винтовых механизмов, отличающееся тем, что автоматическое управление обеспечивает одновременное достижение условий «блокировки» внешнего воздействия одновременно по двум координатам объекта защиты путем согласованных настроечных движений по изменению положения пригрузов на плечах рычагов с помощью сервоприводов для достижения признаков стабилизации объекта.
На фиг. 1 показана принципиальная схема динамического гашения колебаний.
На фиг. 2 изображена структурная схема виброзащитной системы при кинематическом возмущении.
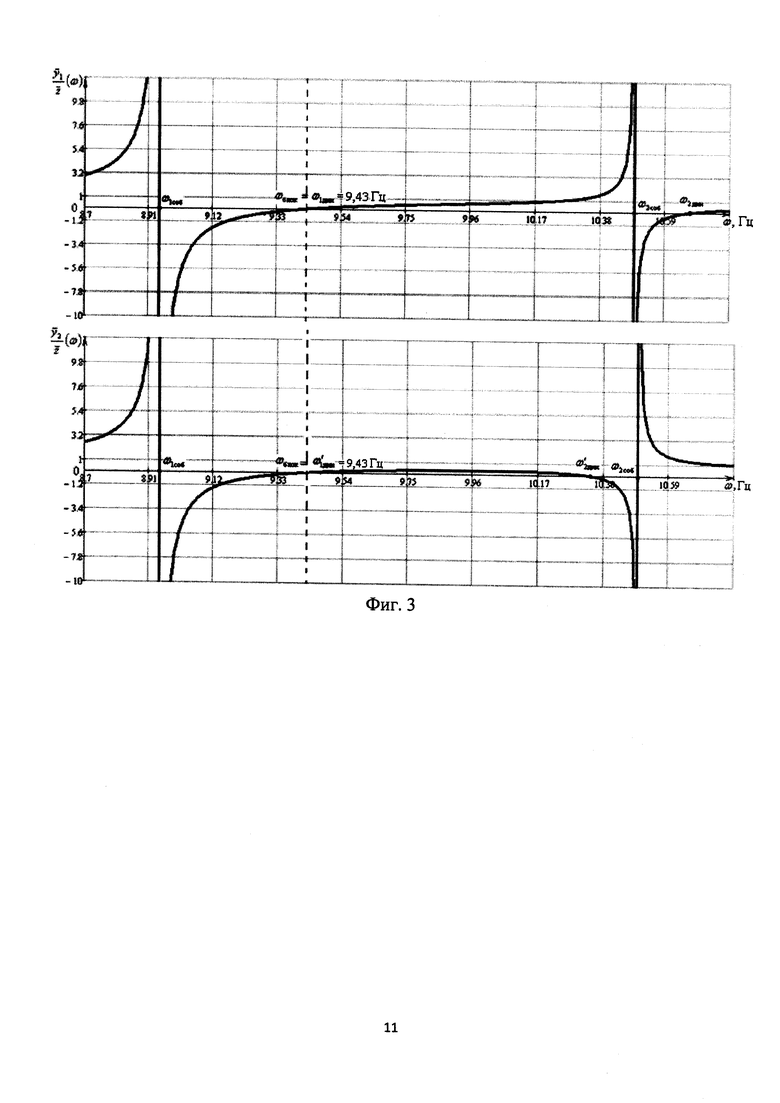
На фиг. 3 приведены амплитудно-частотная характеристика системы, отражающая особенности динамического состояния объекта при одновременном динамическом гашении колебаний по двум координатам.
На фиг. 1 показаны: основание 1; рычаги 2, 3; сервоприводы 4, 5; объект защиты 6; виброизмерительные датчики 7, 8; блок управления 9; пружины 10, 11; грузы 12, 13; датчик измерения вибрации основания 14.
Введены следующие обозначения: y0 - колебания центра тяжести объекта защиты 6; y1, y2 - вертикальные колебания объекта защиты 6; М, J - массоинерционные параметры объекта защиты 6; ϕ - угловые колебания объекта защиты 1; ϕ1 - угловые колебания рычага 2; ϕ1 - угловые колебания рычага 3;  - длины плеч рычагов 2 и 3; m1, m2 - массы дополнительных грузов 12 и 13;
- длины плеч рычагов 2 и 3; m1, m2 - массы дополнительных грузов 12 и 13;  - колебания груза 12;
- колебания груза 12;  - колебания груза 13; z(t) - кинематическое возмущение основания 1; т. О - центр тяжести объекта защиты 6; т. O1 - точка вращения рычага 2; т. O2 - точка вращения рычага 3; т. А - точка крепления рычага 2 и пружины 10 с объектом защиты 6; т. В - точка крепления рычага 3 и пружины 11 с объектом защиты 6.
- колебания груза 13; z(t) - кинематическое возмущение основания 1; т. О - центр тяжести объекта защиты 6; т. O1 - точка вращения рычага 2; т. O2 - точка вращения рычага 3; т. А - точка крепления рычага 2 и пружины 10 с объектом защиты 6; т. В - точка крепления рычага 3 и пружины 11 с объектом защиты 6.
Осуществление способа выполняется по следующему принципу: между основанием и объектом защиты устанавливают две пружины. Параллельно пружинам устанавливают два шарнирно-рычажных механизма, на концах которых закрепляют дополнительные массы. Движение рычагов осуществляют за счет блока управления и сервоприводов. Режим работы виброзащитной системы регулируют с помощью виброизмерительных датчиков и блока управления.
Способ реализован с помощью устройства, которое работает следующим образом: со стороны основания 1 на объект защиты 6 передается кинематическое возмущение z(t) через пружины 10, 11. Информация о значении колебаний объекта защиты 6 регистрируется датчиками 7 и 8 и поступает в блок управления 9, запрограммированный на обнуление амплитуд колебаний объекта защиты 6. Из блока управления 9 подается сигнал на сервоприводы 4 и 5 на изменение длины плеч рычагов 2 и 3, при угловых движениях которых грузы 12 и 13 создают дополнительные инерционные силы, способствующие компенсированию колебаний объекта защиты 6. Значение частоты кинематического возмущения, при котором амплитуды колебаний объекта защиты 6 становятся равными нулю, поступает на датчик измерения вибрации основания 14 в блок управления 9.
Предлагаемый способ динамического гашения колебаний по сравнению с другими известными изобретениями позволяет добиться одновременного обнуления амплитуд по двум координатам, обеспечивая при этом способность автоматического поддержания режима на заданных частотных интервалах.
Особенности динамических свойств и возможностей виброзащитной системы оценивались на основе методов вычислительного моделирования. Апробация результатов проводилась на примере следующих параметров: М=20 кг; J=20 кг⋅м2; k1=8000 Н/м; k2=10000 Н/м; m1=15 кг; m2=10 кг; 


 На основании проведенных исследований были построены графики зависимости амплитуд колебаний y1 и y2 от частоты кинематического возмущения z(t), по результатам которых было установлено, что на частоте ωдин.=9,43 Гц наблюдается одновременное «блокирование» движения по двум координатам, что подтверждает соответствие поставленной цели полученным расчетам.
На основании проведенных исследований были построены графики зависимости амплитуд колебаний y1 и y2 от частоты кинематического возмущения z(t), по результатам которых было установлено, что на частоте ωдин.=9,43 Гц наблюдается одновременное «блокирование» движения по двум координатам, что подтверждает соответствие поставленной цели полученным расчетам.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство одновременного динамического гашения колебаний объекта защиты по двум степенями свободы | 2017 |
|
RU2700942C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМАМИ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2676116C2 |
| Способ динамического гашения колебаний технического объекта и устройство для его реализации | 2017 |
|
RU2668887C1 |
| Способ управления формированием режимов динамического гашения колебаний и устройство для его реализации | 2017 |
|
RU2654276C1 |
| СПОСОБ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ ТЯГОВОГО ДВИГАТЕЛЯ ЛОКОМОТИВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2654877C1 |
| СПОСОБ ОДНОВРЕМЕННОГО ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ ЭЛЕМЕНТОВ МЕХАНИЧЕСКОЙ ЦЕПИ | 2016 |
|
RU2648661C1 |
| СПОСОБ УПРАВЛЕНИЯ И ИЗМЕНЕНИЯ ДИНАМИЧЕСКОГО СОСТОЯНИЯ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2696062C1 |
| Способ динамического гашения колебаний объекта защиты и устройство для его осуществления | 2017 |
|
RU2654890C1 |
| Устройство для гашения колебаний | 2017 |
|
RU2668933C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ СОСТОЯНИЕМ ВИБРАЦИОННОЙ ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ | 2017 |
|
RU2693711C2 |

Группа изобретений относится к области машиностроения. Динамически гасят колебания в виброзащитной системе с двумя степенями свободы, содержащей механизмы для преобразования движения. Формируют динамический эффект «блокирования» внешних сил. Устройство для реализации способа содержит упругие опоры в виде пружин. Рычажные механизмы установлены на каждой из опор объекта защиты и имеют на свободных концах дополнительные пригрузы, выполненные с возможностью перемещения по плечу рычага для обеспечения возможности достижения определенных значений частоты «блокировки» внешней силы по двум опорам. Устройство автоматического поддержания режима динамического гашения колебаний объекта состоит из датчиков учета изменения координат движения объекта защиты и основания, блоков обработки информации, источников энергии и сервоприводов в виде винтовых механизмов. Автоматическое управление обеспечивает согласованные настроечные движения по изменению положения пригрузов на плечах рычагов посредством сервоприводов. Достигается гашение колебаний одновременно по двум координатам. 3 н.п. ф-лы, 3 ил.
1. Способ динамического гашения колебаний в виброзащитной системе с объектом защиты с двумя степенями свободы, содержащей механизмы для преобразования движения, вызванного вибрациями опорной поверхности, обеспечивающий одновременное достижение гашения колебаний по двум координатам, определяющим его положение, отличающийся тем, что формируется и используется динамический эффект «блокирования» внешних сил с помощью создания условий непроходимости внешнего воздействия к точкам контакта объекта защиты и упругих элементов, находящихся в соединениях между опорной поверхностью и объектом.
2. Устройство для реализации динамического гашения колебаний объекта, установленного на упругих опорах в виде пружин и содержащих в своем составе рычажные механизмы для преобразования движения, отличающееся тем, что рычажные механизмы устанавливаются на каждой из опор объекта защиты и имеют на свободных концах дополнительные пригрузы, которые обладают возможностями перемещения по плечу рычага для обеспечения возможности достижения определенных значений так называемой частоты «блокировки» внешней силы по двум опорам, чем достигается режим динамического гашения колебаний объекта защиты одновременно по двум координатам.
3. Устройство автоматического поддержания режима динамического гашения колебаний объекта одновременно по двум координатам, состоящее из виброизмерительных устройств, представляющих датчики учета изменения координат движения объекта защиты и основания, блоков обработки информации, источников энергии и сервоприводов в виде винтовых механизмов, отличающееся тем, что автоматическое управление обеспечивает одновременное достижение условий «блокировки» внешнего воздействия одновременно по двум координатам объекта защиты путем согласованных настроечных движений по изменению положения пригрузов на плечах рычагов с помощью сервоприводов для достижения признаков стабилизации объекта.
| Способ получения борной кислоты | 1951 |
|
SU98792A1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ ПИЛОТА ВЕРТОЛЕТА И ПОДВЕСКА СИДЕНЬЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2015 |
|
RU2597042C1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

