Изобретение относится к области вибрационной техники и может быть использовано для контроля динамического состояния вибрационных технологических машин.
Вибрационные технологические процессы в последние годы получили достаточно широкое распространение во многих отраслях производства: горнодобывающей промышленности, строительной индустрии, обработке различных материалов с целью модификации свойств их поверхностей, вибрационном упрочнении и др. В настоящее время широкое применение находят вибрационные стенды различного назначения, колебательные движения рабочих органов которых обеспечиваются работой пневматических, гидравлических и электромеханических устройств. Вопросы проектирования и разработки технологических вибрационных машин посвящены работы отечественных специалистов [1-5].
Вместе с тем, существует и ряд проблем, возникающих при обеспечении стабильности параметров вибрационных динамических процессов, особенно в тех ситуациях, когда для обеспечения соответствующего качества технологических процессов возникает необходимость поддержания стабильности структуры вибрационных полей рабочих органов вибрационных машин.
Теоретические аспекты проблем формирования и управления динамическим состоянием рабочих органов вибростендов обычно рассматриваются с использованием расчетных схем в виде механических колебательных систем с числом степеней свободы от 1 до 6, хотя наиболее распространены технологические машины, имеющие не более трех степеней свободы. Если в вибростендах реализуются колебательные процессы с двумя степенями свободы, то обеспечение стабильности параметров вибрационного поля требует специальных средств, что обеспечивается дополнительными устройствами и соответствующими системами автоматического контроля и управления динамическими состояниями.
Важным обстоятельством в таких условиях является выбор способов и средств влияния на распределение амплитуд колебаний отдельных точек рабочего органа вибростенда, особенно в таких случаях, когда рабочий орган представляет собой твердое тело, совершающее плоское движение.
В процессе патентного поиска выявлен ряд изобретений-аналогов.
Известен подход [Антипов В.И., Антипова Р.И., Кошелев А.В., Денцов Н.Н. «Вибрационная транспортирующая машина», патент №2532325 С2, МПК В06В 1/00, приоритет 27.10.2014], согласно которому заявленная вибрационная транспортирующая машина включает рабочий орган, соединенный упругой связью с реактивной частью, несущей средство для сообщения резонансных однонаправленных колебаний, и амортизаторы малой жесткости, причем средство для сообщения резонансных однонаправленных колебаний выполнено в виде смонтированных на реактивной части машины, по меньшей мере, пары одинаковых параметрических вибровозбудителей, установленных с возможностью вращения роторов инерционных элементов в противоположных направлениях в вертикальных плоскостях и приводимых во вращение от независимых электродвигателей, а резонансная частота средства для сообщения резонансных однонаправленных колебаний определяется из соотношений
ω=λ1+λ2, λ1=ν⋅ω, 0<ν<1,
где ω - усредненное значение парциальных угловых скоростей роторов, λ1 - эффективная собственная частота качающихся маятников роторов инерционных элементов,  - парциальная собственная частота рабочего органа, соответствующая противофазной форме однонаправленных свободных колебаний, Мпр=М1М2/(М1+М2) - приведенная масса, С - жесткость упругой связи, M1 - масса рабочего органа, M2 - общая масса реактивной части машины.
- парциальная собственная частота рабочего органа, соответствующая противофазной форме однонаправленных свободных колебаний, Мпр=М1М2/(М1+М2) - приведенная масса, С - жесткость упругой связи, M1 - масса рабочего органа, M2 - общая масса реактивной части машины.
Недостатком данного изобретения является отсутствие в конструкции устройства для регулирования приведенной жесткости системы.
Интерес представляет предложение, приведенное в патенте на изобретение [Пановко Г.Я., Шохин А.Е., Бармина О.В., Еремейкин С.А., Горбунов А.А. «Устройство для автоматической настройки и поддержания резонансных режимов колебаний вибрационной машины с приводом от асинхронного двигателя», патент №2589639 С1, МПК В06В 1/14, приоритет 10.07.2016] и представляющее собой устройство для автоматической настройки и поддержания резонансных режимов колебаний вибрационной машины с приводом от асинхронного двигателя содержит блок управления, частотный преобразователь электроэнергии, два датчика положения дебаланса, датчик колебаний, установленный на рабочем органе вибромашины. Согласно изобретению, датчики положения дебаланса выполнены в виде двух оптопар, установленных на корпусе электродвигателя в точках, расположенных симметрично относительно оси вращения дебаланса на горизонтальной линии, проходящей через эту ось, а дебаланс выполнен с отверстием, центр которого расположен на линии, соединяющей центр вращения и центр масс дебаланса в точке, соответствующей оси чувствительности оптопар, причем датчик колебаний и датчики положения дебаланса соединены с входами блока управления, выход которого соединен с управляющим входом частотного преобразователя, силовой вход которого соединен с внешним источником электропитания, а выход частотного преобразователя соединен с асинхронным двигателем. Технический результат направлен на автоматическую настройку и поддержание резонансных колебаний рабочего органа вибрационной машины, возбуждаемых дебалансным инерционным вибровозбудителем с приводом от асинхронного электродвигателя, при изменении параметров механической системы вибромашины за счет управления частотой питающего напряжения.
К недостатками данного изобретения можно отнести отсутствие возможности регулирования приведенной жесткости системы и невнимание к вращательной степени свободы рабочего органа вибрационной машины.
Определенные возможности предлагаются и раскрыты в изобретении [Марченко А.Ю., Серга Г.В., Серга М.Г. «Вибрационная установка для обезвоживания сыпучих материалов», патент №2580128 С1, МПК B01D 35/20, B01D 33/54, B01D 33/27, приоритет 10.04.2016], представляющем собой вибрационную установку для обезвоживания сыпучих материалов содержит фильтр, загрузочное приспособление и разгрузочные приспособления для отвода фильтрата и сгущенной фракции. Фильтр упруго установлен на основании с вибратором, смонтированным горизонтально внутри основания, и изготовлен в виде квадрата, выполненного пустотелым с криволинейной винтовой перфорированной поверхностью по внутреннему периметру с карманами криволинейной формы. При этом фильтр смонтирован из жестко соединенных поочередно друг с другом четырех пустотелых перфорированных секций, выполненных в виде пустотелого кругового перфорированного сектора с четырьмя пустотелыми прямолинейными перфорированными секциями. Четыре перфорированные секции, выполненные в виде пустотелого кругового перфорированного сектора с криволинейной многозаходной винтовой перфорированной поверхностью, снабженной винтовыми канавками внутри кругового перфорированного сектора под углом к его оси в виде карманов криволинейной формы с центрами кривизны, расположенными внутри поперечного сечения кругового перфорированного сектора, смонтированы из перфорированных подсекций, каждая из которых изготовлена из перфорированной полосы, свернутой в кольцо с образованием разных по размерам четырехугольников с двумя параллельными сторонами, расположенными параллельно друг другу. При этом перфорированные подсекции соединены друг с другом свободными сторонами упомянутых четырехугольников в виде пустотелого кругового перфорированного сектора с образованием по внутренней перфорированной поверхности направленных в одну сторону под углом к продольной оси кругового перфорированного сектора криволинейных винтовых перфорированных поверхностей в виде карманов криволинейной формы по внутренней перфорированной поверхности. При этом расстояние между линиями сгиба равно сумме длин периметров геометрических фигур карманов внутренней и перфорированных поверхностей, а четыре пустотелые прямолинейные перфорированные секции по периметру изготовлены из одной и более перфорированных полос, согнутых криволинейно по размещенным под углом к их продольным кромкам линиям сгиба с образованием по внутренней перфорированной поверхности направленных в одну сторону под углом винтовых перфорированных поверхностей в виде карманов внутренней перфорированной поверхности криволинейной формы. Разгрузочное приспособление выполнено в виде кольцевой юбки с разгрузочным отверстием для отвода фильтрата, прикрепленного к основанию под углом β к горизонту. Техническим результатом является расширение технологических возможностей вибрационной установки, увеличение производительности установки, а также увеличение пути движения сыпучих материалов в фильтре.
Основным недостатком является отсутствие регулирования динамического состояния вибрационной установки.
Интересной является техническая идея управления динамическим состоянием вибростенда в соответствии с патентом на изобретение, принимаемого за прототип [Елисеев С.В., Елисеев А.В., Каимов Е.В., Большаков Р.С., Филатов Е.В., Миронов А.С., Выонг К.Ч. «Способ управления формированием режимов динамического гашения колебаний и устройство для его реализации», патент №2654276 С1, МПК F16F 15/04, F16F 7/08, приоритет 17.05.2018], согласно которой создается цепная схема соединения элементов при кинематическом возмущении со стороны общей вибрирующей опорной поверхности и вводится во все каскады исходной системы устройства для преобразования движения, представляющие собой несамотормозящиеся винтовые механизмы. Используются настроечные механизмы из фрикционных колодок, прижимаемых к боковым поверхностям гаек-маховиков посредством сервоприводов. Управляют и обеспечивают соблюдение связности между значениями приведенных масс, опирающихся на вибрирующую поверхность, по сигналу со стороны системы управления. Устройство содержит взаимодействующие между собой устройства для преобразования движения. Созданные на гайках-маховиках управляемые силы сопротивления трансформируются в устройства для преобразования движения в соответствующие изменения приведенных масс. Достигается упрощение механизма регулирования динамического состояния виброзащитной системы, гашение колебаний одновременно по двум координатам движения объекта защиты
Изобретение имеет ряд недостатков, к которым можно отнести отсутствие управления одним из упругих каскадов и отсутствие учета вращения твердого тела.
Задачей изобретения является настройка распределения амплитуд колебаний рабочего органа вибростенда за счет контроля параметров устройств для преобразования движения.
Способ настройки динамического состояния рабочего органа вибростенда, заключающийся в том, что включает совершение рабочим органом плоского движения с двумя степенями свободы, опору на упругие элементы в виде двух линейных пружин, и возбуждение двумя синфазными инерционными возбудителями, контроль параметров вертикального движения рабочего органа, отличающейся тем, что в упруго-массовую систему вибростенда дополнительно вводят две конструктивно-технических связи в виде винтовых несамотормозящихся механизмов с приведенными массами, тем самым создают эффекты изменения массоинерционных свойств вибростенда и влияют на общие свойства системы для формирования отношения координат в конечных точках рабочего органа равным постоянной величине и, в частности, единице.
Устройство настройки динамического состояния рабочего органа вибростенда, состоящее из опорных блоков, каждый из которых включает в себя параллельно работающие пружину и винтовой несамотормозящийся механизм, создающие эффекты изменения массо-инерционных свойств системы, отличающееся тем, что применяется винтовой несамотормозящийся механизм с закреплением ходового винта на рабочем органе и возможностями изменения приведенной массы системы в целом, что проявляется в формировании определенных форм движения рабочего органа вибростенда при изменении тормозного момента на гайке-маховике, создаваемом тормозной колодкой по сигналу от системы управления.
Сущность предлагаемого способа поясняется чертежами.
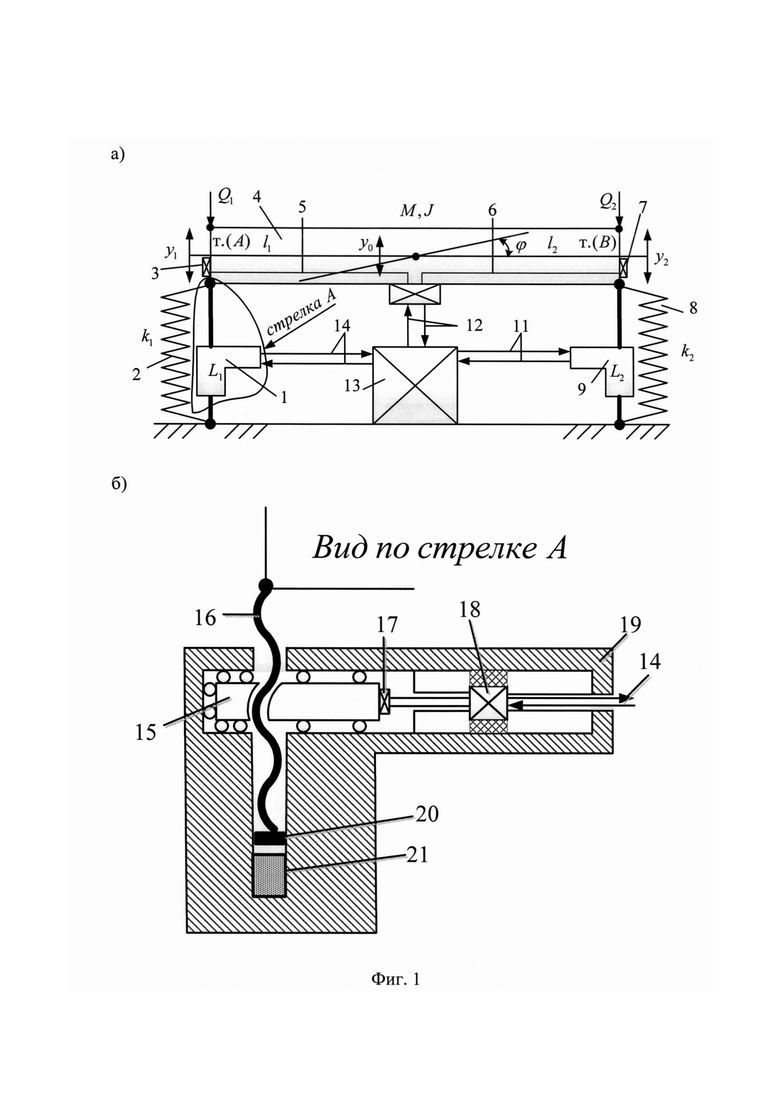
Принципиальная схема вибростенда и его основного узла представлены соответственно на фиг. 1, а и б. Предлагаемое изобретение основано на новом способе формирования структуры вибрационного поля рабочего органа вибростенда. Рабочий орган представляет собой твердое тело, протяженность которого определяется длинами плеч  и
и  относительно центра масс (точка О) от точек приложения усилий со стороны упругих элементов 2 и 8, имеющих соответствующие жесткости k1 и k2.
относительно центра масс (точка О) от точек приложения усилий со стороны упругих элементов 2 и 8, имеющих соответствующие жесткости k1 и k2.
Твердое тело (рабочий орган 4 массой М и моментом инерции J), опирается не только на упругие элементы 2 и 8, но и на устройства для преобразования движения 1 и 9, которые связаны с рабочим органом 4 и опорной поверхностью. На принципиальной схеме (фиг. 1, а) показано, что упругие элементы 1 и 2, а также 8 и 9 соединены параллельно. Устройства для преобразования движения 1 и 9 обладают приведенными массами L1 и L2, которые формируются при взаимодействиях элементов упруго-инерционной системы вибростенда.
Система управления и контроля динамического состояния вибростенда имеет блок питания, обработки информации и реализации корректировки вибрационного поля. Такой блок обозначен как позиция 13 и имеет коммуникационные связи 12 с датчиками параметров вибраций рабочего органа 4, характеризующееся амплитудами колебаний по координатам у1 и у2 концов рабочего органа. Коммуникации 14 связывают блок 13 с исполнительными элементами устройств для преобразования движения 1, 9. В процессе колебательных движений, которые создаются вибрационными инерционными возбудителями Q1 и Q2 (фиг. 1, а), приложенными в т. А и т. В.
На фиг. 1, б показана общая схема устройства для преобразования движения (вид по стрелке А). Устройство представляет собой винтовой несамотормозящийся механизм, состоящий из гайки-маховика 15 и ходового винта 16.
Ходовой винт 16 соединяется через шарнир с рабочим органом 4. Корпус 15 устройства для преобразования движения закрепляется на неподвижной опорной поверхности. Ходовой винт имеет возможности перемещаться в цилиндрическом стволе корпуса 19, содержит опорную шайбу 20 и опорный резиновый ограничитель 21 для контроля осадки рабочего органа 4 в случае отказа системы.
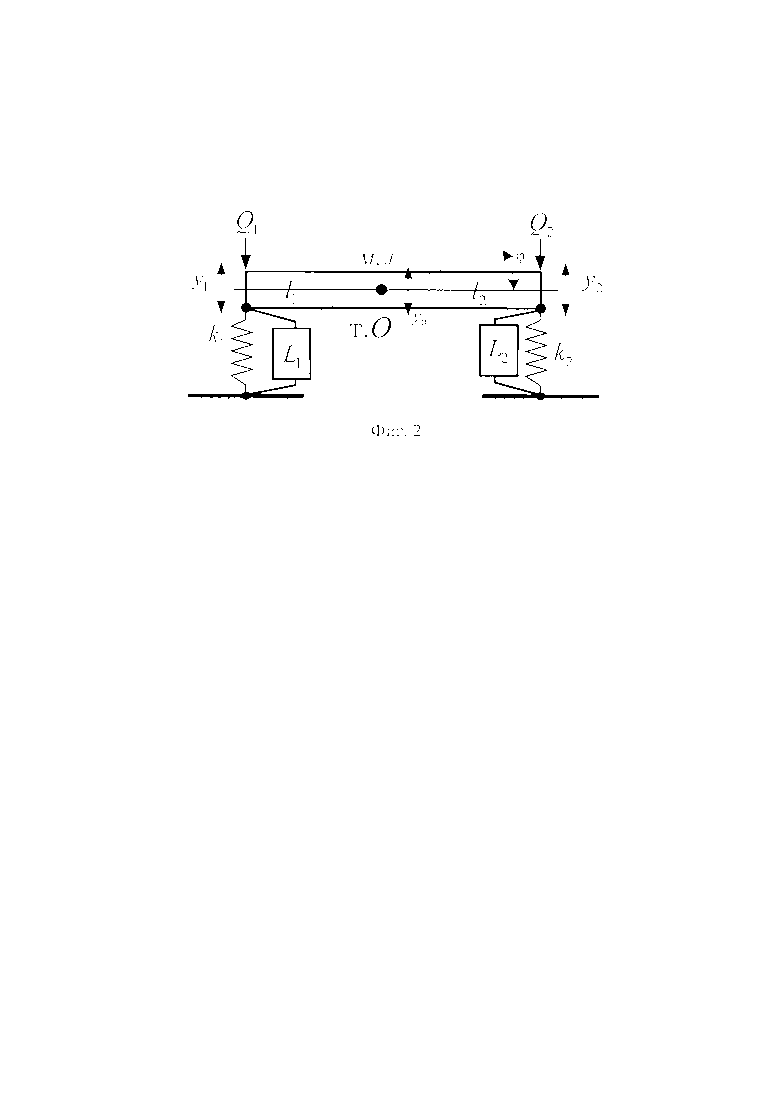
На фиг. 2 приведена принципиальная схема вибростенда с устройством для преобразования движения (УПД).
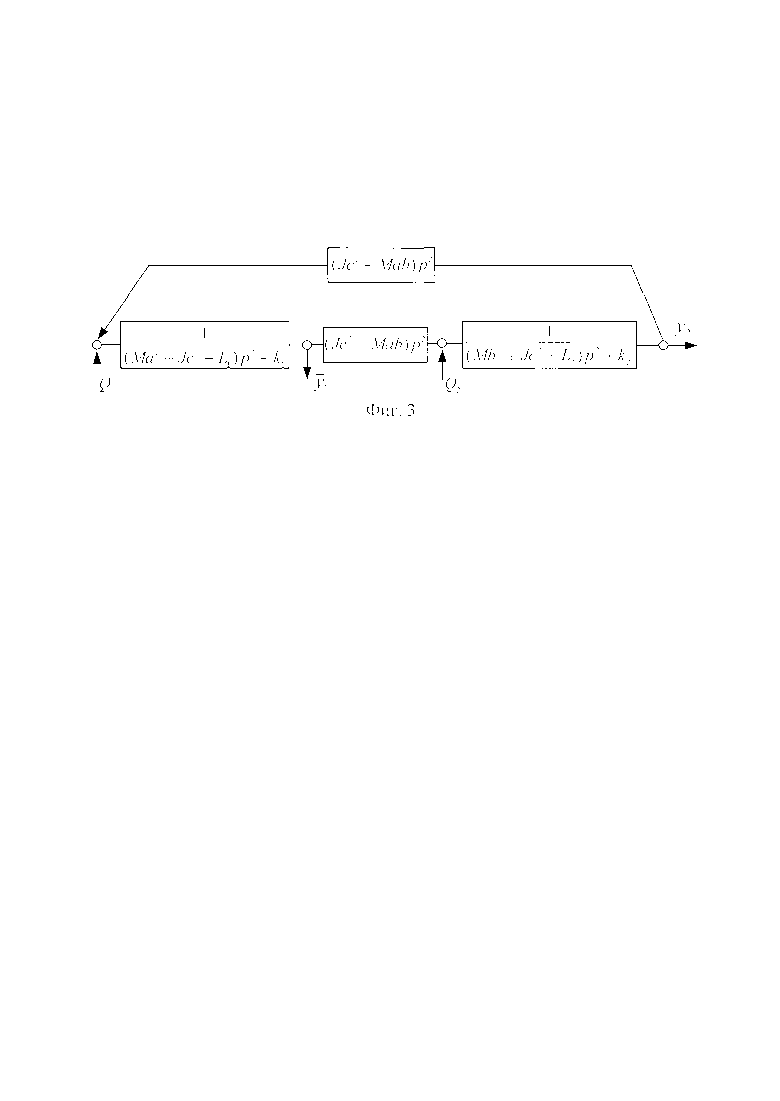
На фиг. 3 представлена структурная математическая модель (структурная схема) системы (фиг. 2).
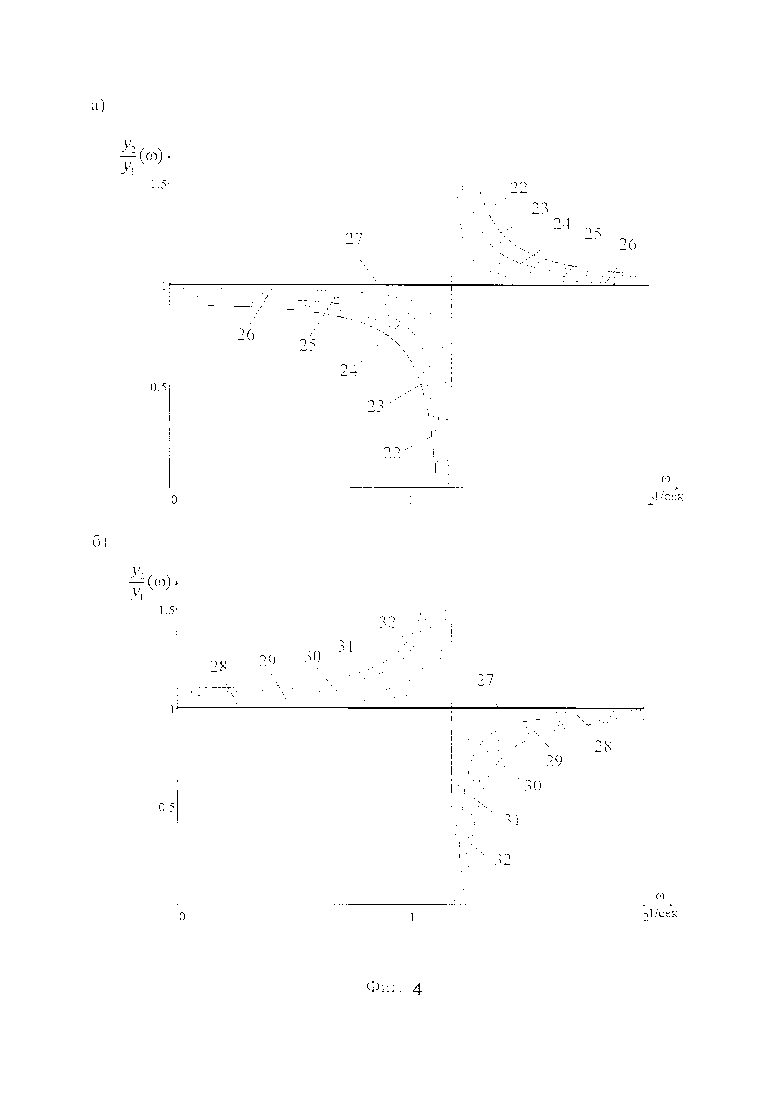
На фиг. 4, а, б приведены семейства амплитудно-частотных характеристик межпарциальных связей, имеющих следующие обозначения: графики, обозначенные 22, представляют собой кривые при k1=900 кН/м; график 23 – k1=920 kH/м; график 24 – k1=940 kH/м; график 25 – k1=960 kH/м; график 26 – k1=980 kH/м; график, отмеченный как 27 соответствует режиму работы при  график 28 – k1=1020 kH/м; график 29 – k1=1040 kH/м; график 30 – k1=1060 kH/м; график 31 – k1=1080 kH/м; график 32 – k1=1100 kH/м;. Для построения амплитудно-частотных характеристик решалась модельная задача с параметрами а=0.4; b=0.6; с=1; М=1000 кг; J=250 кг.м2; L2=100 кг; L1=300 кг; k2=1000 kH/м; k1=900, 920, 940 … 1080, 1100 kH/м.
график 28 – k1=1020 kH/м; график 29 – k1=1040 kH/м; график 30 – k1=1060 kH/м; график 31 – k1=1080 kH/м; график 32 – k1=1100 kH/м;. Для построения амплитудно-частотных характеристик решалась модельная задача с параметрами а=0.4; b=0.6; с=1; М=1000 кг; J=250 кг.м2; L2=100 кг; L1=300 кг; k2=1000 kH/м; k1=900, 920, 940 … 1080, 1100 kH/м.
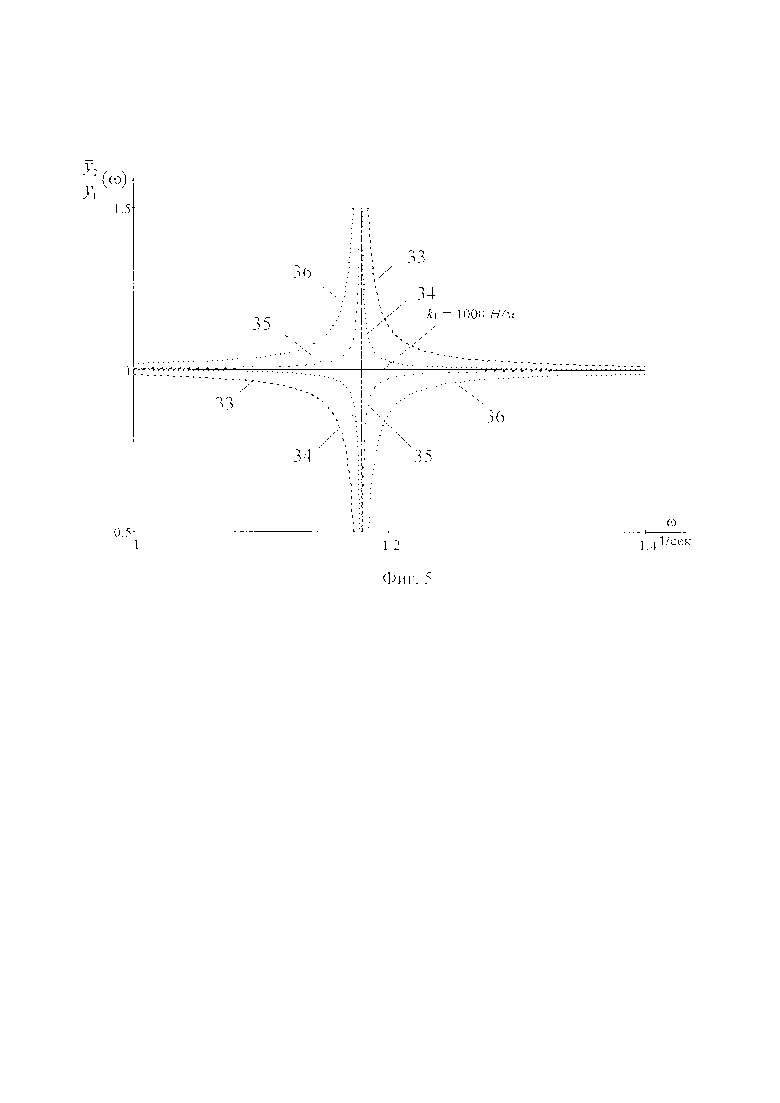
На фиг. 5 представлено семейство амплитудно-частотных характеристик межпарциальных связей; графики 33 представляют собой кривые при k1=995 kH/м; графики 34 – k1=999 kH/м; графики 35 – k1=1001 kH/м; графики 36 – k1=1005 kH/м; графики со значением k1=1000 Н/м соответствует режиму работы при 
Изобретение работает следующим образом.
Управление динамическим состоянием рабочего органа осуществляется за счет создания тормозного момента на гайке-маховике 15 за счет прижима тормозной колодки 17, которая приводится в соответствующее движение сигналом, поступающим из блока управления 13 через каналы связи 14 к актуатору (или электрическому сервоприводу) 18. Доступ к исполнительным механизмам устройств для преобразования движения обеспечивается через отверстие, имеющее съемную крышку 19. Винтовой несамотормозящийся механизм 16, обладающий приведенной массой L1 (имеется также и второй устройство с приведенной массой L2), при формировании тормозного момента через гайку-маховик 15 создает динамический эффект, аналогичный, возможному увеличению приведенной массы, что интерпретируется в фактор настройки вибрационного поля. Эффект настройки заключается в том, что передаточная функция межпарциальной связи в системе (или отношение амплитуд колебаний в тт. А и В рабочего органа 4) может быть сделано равным единице. В этом случае становится возможной реализация условий, требуемых нормами технологического процесса вибрационной обработки. Теоретическое обоснование способа настройки вибрационного поля прилагается.
Список литературы
1. Блехман И.И. Вибрационная механика. М.: Наука. 1994. - 400 с.
2. Быховский И.И. Основы теории вибрационной техники. М.: Машиностроение, 1969. 364 с.
3. - Повидайло В.А. Вибрационные устройства в машиностроении. М.; Киев: Машгиз. [Юж. отд-ние], 1962. - 111 с.
4. Пановко Г.Я. Лекции по основам теории вибрационных машин и технологий. М.: МГТУ им. Баумана, 2008. - 192 с.
5. Копылов Ю.Р. Динамика процессов виброударного упрочнения: монография / Воронеж: ИПЦ «Научная книга», 2011. - 569 с.
Теоретическое обоснование
I. Некоторые общие положения. Постановка задачи исследования
В качестве расчетной схемы вибрационного стенда рассматривается механическая колебательная система с твердым телом, совершающим плоские движения. Твердое тело (рабочий орган вибростенда) обладает массой М и моментом инерции J (фиг. 2) и опирается на упругие элементы с жесткостями k1 и k2, параллельно которым подсоединены дополнительные устройства для преобразования движения (УПД), обладающие приведенными массами L1 и L2. Такого рода устройства могут быть реализованы на основе рычажных или несамотормозящихся винтовых механизмов (УПД) [6].
Система обладает двумя степенями свободы и совершает малые колебания относительно положения статического равновесия. Движения определяются в системе координат, связанной с неподвижным базисом. Полагается, что внешние силовые возмущения Q1 и Q2 по координатам у1 и у2 имеются вид синфазных гармонических функций с одинаковыми амплитудами, что может быть обеспечено с помощью центробежных вибровозбудителей.
Система уравнений движения может быть получена на основе известных подходов [7] с использованием выражений для кинетической и потенциальной энергий в виде
Между координатами y1, y2 и y0, ϕ имеются соотношения

где 
После преобразований Лапласа при нулевых начальных условиях система уравнений движения в операторной форме принимает вид


где р=jω - комплексная переменная  значок
значок  над переменной означает ее изображение по Лапласу [7].
над переменной означает ее изображение по Лапласу [7].
На основании уравнений (4), (5) может быть построена структурная математическая модель в виде структурной схемы (фиг. 3) эквивалентной в динамическом отношении системы автоматического управления.
На основе структурной схемы можно построить передаточные функции системы:
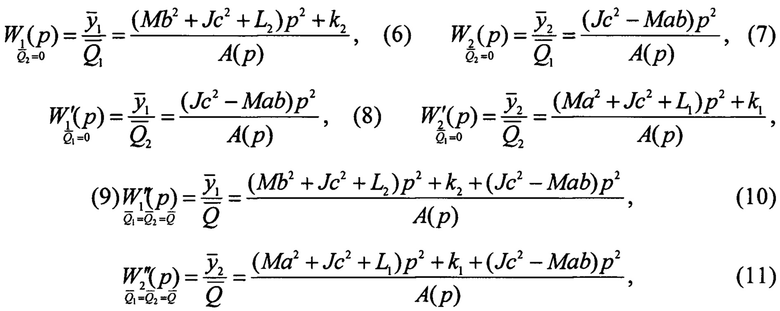
где 
- частотное характеристическое уравнение системы.
В системе координат 
 структурная схема имеет два парциальных блока, соединенных между собой инерционной связью. Значения парциальных частот зависят от приведенных масс L1 и L2 устройств для преобразования движения (УПД):
структурная схема имеет два парциальных блока, соединенных между собой инерционной связью. Значения парциальных частот зависят от приведенных масс L1 и L2 устройств для преобразования движения (УПД):

В системе возможны проявления режимов динамического гашения колебаний, что зависит от условий внешнего возмущения. При этом частота динамического гашения колебаний определяется из условия «обнуления» числителей передаточных функций, определенных выражениями (6)÷(11).
Оценка возможностей распределения амплитуд колебаний по точкам рабочего органа вибрационной технологической машины определяется передаточной функцией межпарцальных связей
II. Определение условий равномерного распределения
Распределение амплитуд колебаний  соответствует ситуации, когда твердое тело совершает поступательные колебательные движения по вертикали при полном отсутствии колебательных угловых движений. Из (17) получим, что
соответствует ситуации, когда твердое тело совершает поступательные колебательные движения по вертикали при полном отсутствии колебательных угловых движений. Из (17) получим, что

откуда следует, что

Если можно обеспечить условие

то отношение амплитуд колебаний  - будет определяться отношением коэффициентов жесткостей упругих элементов
- будет определяться отношением коэффициентов жесткостей упругих элементов 
При k1=k2 и L2, определяемом из (20), можно получить условия реализации режима поступательных колебательных вертикальных движений. Если k1≠k2, то такой режим не может быть реализован.
Аналогично, можно найти условие, когда настроечным фактором выступает величина приведенной массы L1; при этом

Из (20) и (21) следует, что величина приведенной массы, используемой для создания определенного динамического состояния зависит от разности геометрических параметров а и b. Чем меньше величина (а-b), тем меньше требуется величина приведенной массы.
Получение режима близкого к  возможно при наличии даже одного из устройств для преобразования движения L1 или L2. Практически реализация формирования определенного значения приведенной массы L1 или L2 устройств для преобразования движения (УПД) может быть осуществлена способом, где рассматривается использование эффекта изменения приведенной массы за счет приложения к гайке-маховику УПД тормозного момента, регулируемого в зависимости от параметров динамического состояния системы. На фиг. 4, а, б приводятся амплитудно-частотные характеристики межпарциальных связей. Используется модельная задача; приводятся данные расчетов а=0.4; b=0.6; с=1; М=1000 кг; J=250 кг.м2; k2=1000 кН/м; L2=100 кг; L1=300 кг; Графики зависимостей
возможно при наличии даже одного из устройств для преобразования движения L1 или L2. Практически реализация формирования определенного значения приведенной массы L1 или L2 устройств для преобразования движения (УПД) может быть осуществлена способом, где рассматривается использование эффекта изменения приведенной массы за счет приложения к гайке-маховику УПД тормозного момента, регулируемого в зависимости от параметров динамического состояния системы. На фиг. 4, а, б приводятся амплитудно-частотные характеристики межпарциальных связей. Используется модельная задача; приводятся данные расчетов а=0.4; b=0.6; с=1; М=1000 кг; J=250 кг.м2; k2=1000 кН/м; L2=100 кг; L1=300 кг; Графики зависимостей  , то есть амплитудно-частотные характеристики межпарциальных связей, приводятся на фиг. 4 (семейство графиков построено при k1→k2).
, то есть амплитудно-частотные характеристики межпарциальных связей, приводятся на фиг. 4 (семейство графиков построено при k1→k2).
Из анализа графиков следует, что в общем случае, когда k1≠k2, амплитудно-частотные характеристики межпарциальных связей имеют пересечения с осью абсцисс, что определяет режимы динамического гашения колебаний  Вместе с тем, амплитудно-частотные характеристики имеют частоты, на которых реализуются разрывы второго рода, что соответствует условиям, когда
Вместе с тем, амплитудно-частотные характеристики имеют частоты, на которых реализуются разрывы второго рода, что соответствует условиям, когда  При ω=0 и ω→∞ графики зависимостей имеют предельные значения.
При ω=0 и ω→∞ графики зависимостей имеют предельные значения.
На фиг. 4, а графики зависимостей сгруппированы таким образом, что можно наблюдать изменения их взаимного расположения, когда k1 принимает значения k1=900 кН/м, 920 кН/м, 940 кН/м, 960 кН/м, 980 кН/м, приближаясь к критическому случаю k1=k2=1000 кН/м. В свою очередь на фиг. 4, б приводится семейство амплитудно-частотных характеристик, когда k1 принимает значения 1100 кН/м, 1080 кН/м, 1060 кН/м, 1040 кН/м, 1020 кН/м, приближаясь также к значению k1=1000 кН/м и k2=1000 кН/м. В предельном случае амплитудно-частотная характеристика превращается в прямую  параллельную оси абсцисс. В этом случае вибростенд совершает только вертикальные колебания при отсутствии угловых движений рабочего органа. Можно отметить, что в зоне достаточной близости параметров, когда k1≈k2, также возможна работа вибростенда в определенном частотном диапазоне, при этом
параллельную оси абсцисс. В этом случае вибростенд совершает только вертикальные колебания при отсутствии угловых движений рабочего органа. Можно отметить, что в зоне достаточной близости параметров, когда k1≈k2, также возможна работа вибростенда в определенном частотном диапазоне, при этом 
На фиг. 5 приводится семейство амплитудно-частотных характеристик межпарциальных связей при более детализированном рассмотрении сближения коэффициентов k1 и k2 (в частности, используются значения параметров k1=995 кН/м, 999 кН/м, 1001 кН/м, 1005 кН/м). Сравнительный анализ показывает, что при симметрии упругих характеристик, то есть при k1 достаточно близком к значениям k2, возможна настройка вибростенда за счет введения дополнительной связи, создающей компенсирующие эффекты изменения приведенных масс, создаваемых устройствами для преобразования движения, которые обеспечивают равенство коэффициентов при квадратах частот в выражениях для передаточных функций межпарциальных связей. Анализ показывает также, что при значительном несовпадении жесткости упругих элементов k1 и k2 требуется их предварительная настройка, что может быть реализовано при подготовке вибрационной технологической машины к работе. При подготовке теоретического обоснования использовались литературные источники.
Список литературы
1. Блехман И.И. Вибрационная механика. М.: Наука. 1994. - 400 с.
2. Быховский И.И. Основы теории вибрационной техники. М.: Машиностроение, 1969. 364 с.
3. - Повидайло В.А. Вибрационные устройства в машиностроении. М.; Киев: Машгиз. [Юж. отд-ние], 1962. - 111 с.
4. Пановко Г.Я. Лекции по основам теории вибрационных машин и технологий. М.: МГТУ им. Баумана, 2008. - 192 с.
5. Копылов Ю.Р. Динамика процессов виброударного упрочнения: монография / Воронеж: ИПЦ «Научная книга», 2011. - 569 с.
6. Eliseev S.V. Dynamics of mechanical systems with additional ties / S.V. Eliseev, A.V. Lukyanov, Yu.N. Reznik, A.P. Khomenko. - Irkutsk: Publishing of Irkutsk State University, 2006. - 315 p.
7. Елисеев С.В. Прикладная теория колебаний в задачах динамики линейных механических систем / С.В. Елисеев, А.И. Артюнин. - Новосибирск: Наука, 2016. - 459 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ корректировки распределения амплитуд колебаний рабочего органа вибрационного технологического стенда и устройство для его реализации | 2018 |
|
RU2716368C1 |
| Способ управления динамическим состоянием технического объекта при вибрационных воздействиях и устройство для его осуществления | 2018 |
|
RU2696506C1 |
| Способ управления формированием структуры и параметров вибрационного поля технологической машины | 2018 |
|
RU2691646C1 |
| Способ формирования, настройки и корректировки динамического состояния рабочих органов технологических вибрационных машин на основе введения дополнительных упругих связей и устройство для его реализации | 2019 |
|
RU2749364C2 |
| СПОСОБ УПРАВЛЕНИЯ И ИЗМЕНЕНИЯ ДИНАМИЧЕСКОГО СОСТОЯНИЯ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2696062C1 |
| Способ настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2718177C1 |
| Устройство управления динамическим состоянием вибрационной технологической машины | 2019 |
|
RU2734839C1 |
| Способ управления структурой вибрационного поля вибрационной технологической машины на основе использования эффектов динамического гашения и устройство для его осуществления | 2016 |
|
RU2624757C1 |
| Устройство формирования специфических режимов динамического состояния рабочего органа вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2756393C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ СОСТОЯНИЕМ ВИБРАЦИОННОЙ ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ | 2017 |
|
RU2693711C2 |
Группа изобретений относится к области машиностроения. Совершают рабочим органом плоское движение с двумя степенями свободы. Опору на упругие элементы выполняют в виде двух линейных пружин. Применяют два синфазных инерционных возбудителя. Выполняют контроль параметров вертикального движения рабочего органа. В упруго-массовую систему вибростенда дополнительно вводят две конструктивно-технических связи в виде винтовых несамотормозящихся механизмов с приведенными массами. Создают эффекты изменения массоинерционных свойств вибростенда и влияют на общие свойства системы для формирования отношения координат в конечных точках рабочего органа равным единице. Устройство настройки динамического состояния рабочего органа вибростенда содержит опорные блоки. Винтовой несамотормозящийся механизм выполнен с закреплением ходового винта на рабочем органе и возможностью изменения приведенной массы системы в целом. Тормозная колодка создает момент на гайке-маховике по сигналу от системы управления. Достигается возможность настройки распределения амплитуд за счет контроля параметров устройств для преобразования движения. 2 н.п. ф-лы, 5 ил.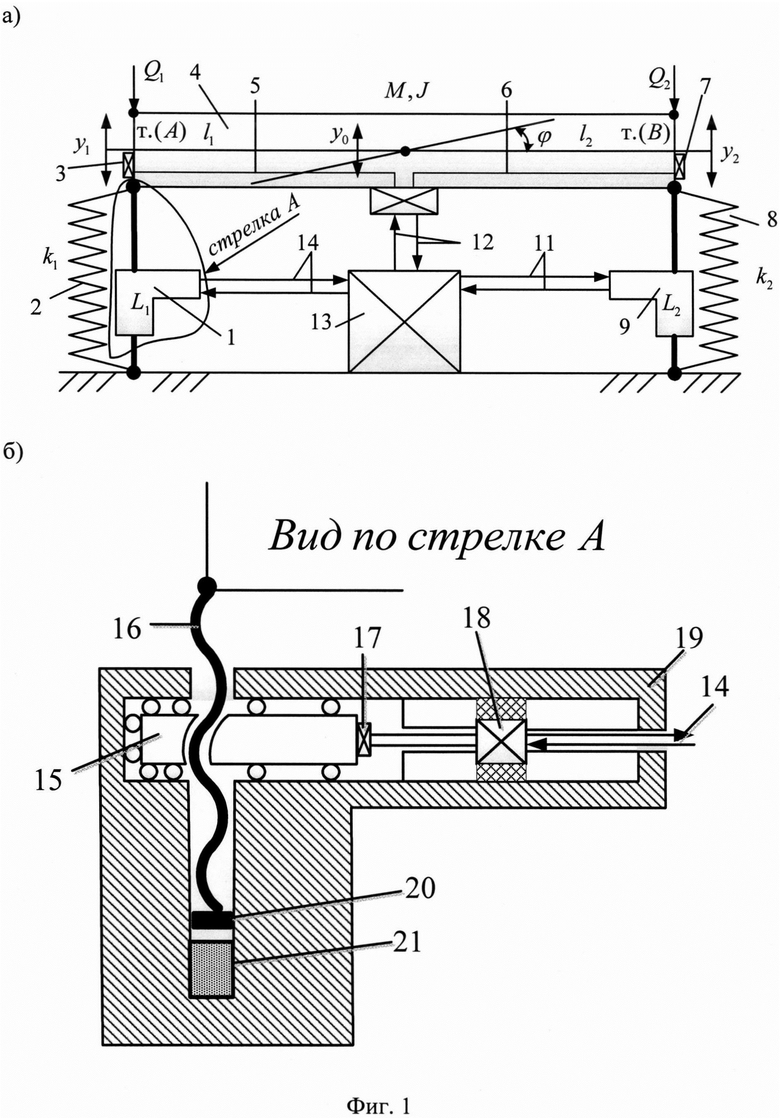
1. Способ настройки динамического состояния рабочего органа вибростенда, заключающийся в том, что включает совершение рабочим органом плоского движения с двумя степенями свободы, опору на упругие элементы в виде двух линейных пружин, и возбуждение двумя синфазными инерционными возбудителями, контроль параметров вертикального движения рабочего органа, отличающейся тем, что в упруго-массовую систему вибростенда дополнительно вводят две конструктивно-технических связи в виде винтовых несамотормозящихся механизмов с приведенными массами, тем самым создают эффекты изменения массоинерционных свойств вибростенда и влияют на общие свойства системы для формирования отношения координат в конечных точках рабочего органа равным постоянной величине и, в частности, единице.
2. Устройство настройки динамического состояния рабочего органа вибростенда, состоящее из опорных блоков, каждый из которых включает в себя параллельно работающие пружину и винтовой несамотормозящийся механизм, создающие эффекты изменения массо-инерционных свойств системы, отличающееся тем, что применяется винтовой несамотормозящийся механизм с закреплением ходового винта на рабочем органе и возможностями изменения приведенной массы системы в целом, что проявляется в формировании определенных форм движения рабочего органа вибростенда при изменении тормозного момента на гайке-маховике, создаваемом тормозной колодкой по сигналу от системы управления.
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475658C2 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Дисковый питатель погрузчика | 1960 |
|
SU136112A1 |

