Изобретение относится к области микромеханики, в частности к вибрационным микромеханическим гироскопам (ММГ) RR-типа.
ММГ этого типа содержат подвижную массу (ПМ) и электроды, которые образуют электростатический задатчик силы и датчик перемещения, систему возбуждения колебаний ПМ чувствительного элемента (ЧЭ) по оси первичных колебаний и систему измерения перемещения ПМ по оси вторичных колебаний.
Подробно работа вибрационных ММГ описана в литературе [1, 2].
На точность измерения угловой скорости ММГ RR-типа влияет изменение зазора между ПМ и электродами, от которого зависит величина масштабного коэффициента ММГ. При работе ММГ в жестких условиях, т.е. при изменении температуры окружающей среды в широком диапазоне (100-150°С), вибрациях и ударах, может происходить изменение величины зазора.
В общем виде текущая величина зазора d определяется:
d=d0+Δd,
где d0 - номинальный зазор между ПМ и неподвижными электродами емкостного датчика по оси вторичных колебаний; Δd - величина изменения зазора при внешних воздействиях.
Существуют различные способы и устройства для определения зазора между электродами и ПМ ММГ, которые в совокупности образуют дифференциальный датчик по оси вторичных колебаний.
Один из способов измерения зазора между электродами и ПМ ММГ описан в [3] и заключается в первоначальном измерении величины электрической емкости между ПМ и одним из электродов; перемещении ПМ до ее касания с основанием, на котором расположен электрод; измерении величины указанной емкости в этом положении; вычислении рабочего зазора по соотношению (1) из [3].
Недостатком этого способа является то, что величина зазора определяется на этапе сборки ММГ и не учитывает изменение зазора при функционировании ММГ.
Известно устройство, описанное в работе [4], которое близко по своему составу к предложенному и содержит: генератор переменного напряжения, соединенный с проводящей ПМ; электроды емкостного датчика, расположенного по оси вторичных колебаний; преобразователи ток-напряжение в виде трансрезистивных усилителей на операционных усилителях с резисторами, включенными между выходом и инвертирующим входом операционных усилителей; аналого-цифровой преобразователь и процессор.
Данное устройство позволяет измерять перемещение ПМ, но не решает задачу определения зазора.
В качестве прототипа выбрано устройство, описанное в работе [5]
Этот ММГ содержит подвижную массу на резонансном подвесе; дифференциальный емкостный датчик, образованный электродами, расположенными по оси вторичных колебаний, и подвижной массой; дополнительные электроды, расположенные по оси вторичных колебаний; источник напряжения, соединенный с одним из дополнительных электродов; преобразователь емкость-напряжение, вход которого соединен с электродами дифференциального емкостного датчика. В ММГ введено вычислительное устройство, входы которого соединены с выходами источника напряжения и преобразователя емкость-напряжение. Это вычислительное устройство формирует напряжение, поступающее к электроду задатчика силы, измеряет напряжение с выхода преобразователя емкость-напряжение и преобразует его в сигнал, пропорциональный величине зазора.
Недостатком прототипа является то, что величина зазора определяется при отсутствии внешних воздействий, и при определении зазора ММГ не функционирует по своему прямому назначению. Поэтому оно не может быть использовано для диагностики изменения характеристик ММГ в процессе работы, реализации алгоритмов управления положением ПМ и преобразования сигналов в ММГ для повышения точности ММГ при работе последнего в жестких условиях.
Задачей изобретения является повышение точности устройства для измерения зазора между неподвижными электродами емкостного датчика по оси вторичных колебаний и ПМ (далее - зазора) в микромеханическом гироскопе RR-типа.
Техническим результатом предлагаемого устройства является возможность измерения текущей величины зазора с учетом его изменения при внешних воздействиях (ускорениях, вибрациях, температурных изменениях).
Это позволяет формировать путем преобразования сигнала с выхода предлагаемого устройства поправки к выходному сигналу ММГ, повышающие его точность, контролировать изменения зазора, вызванные внешними воздействиями, и в определенной степени получать информацию о внешних воздействиях на ММГ.
В качестве возможного использования предлагаемого устройства, в котором измеряется текущее значение зазора, можно указать системы подстройки резонансной частоты (см. [2] стр. 220-221, выражение 8.7 и выражение 5.8 на стр. 114). Измерение текущего зазора позволяет вводить поправки в сигналы управления и измерения соответствующих систем ММГ для повышения точности работы ММГ при работе в жестких условиях.
Технический результат достигается тем, что в ММГ RR-типа, включающем в себя ПМ на резонансном подвесе, дифференциальный емкостный датчик, образованный двумя расположенными по оси вторичных колебаний неподвижными электродами и ПМ, два преобразователя емкость-напряжение (код), входы которых соединены с соответствующими электродами емкостного датчика, введено вычислительное устройство, реализующее функцию вида  , входы которого соединены с выходами первого и второго преобразователя емкость-напряжение (код). Функция вида получена из приведенных ниже выражений 1-4.
, входы которого соединены с выходами первого и второго преобразователя емкость-напряжение (код). Функция вида получена из приведенных ниже выражений 1-4.
Более подробно электродная структура ММГ RR-типа описана в [6].
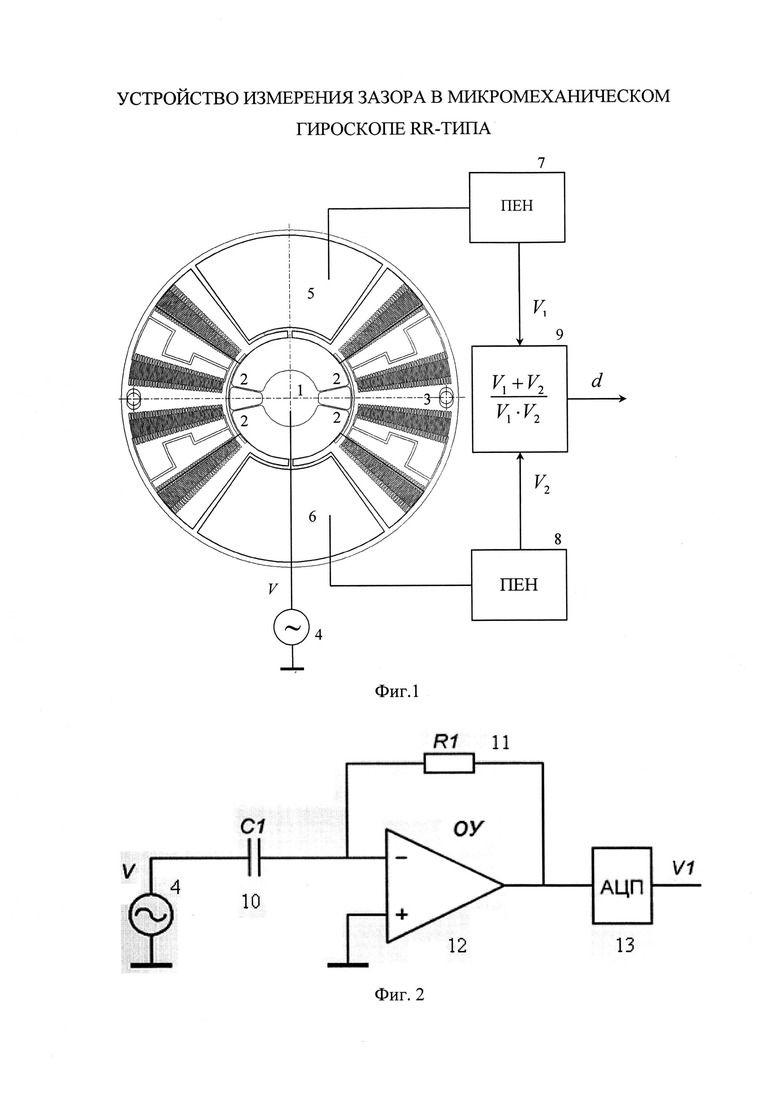
На фиг. 1 приведена блок-схема предлагаемого устройства. На фиг. 1 приняты следующие обозначения:
1 - основание;
2 - упругий подвес;
3 - проводящая ПМ на резонансном подвесе (далее - ПМ);
4 - источник напряжения переменного тока, подаваемого на ПМ;
5, 6 - неподвижные электроды емкостного датчика по оси вторичных колебаний, расположенные на крышке ММГ над ПМ (далее - неподвижные электроды);
7, 8 - преобразователи емкость-напряжение (код) (далее - ПЕН);
9 - вычислительное устройство, реализующее функцию вида , где V1, V2 - сигналы на выходе, соответственно, первого и второго ПЕН.
Источник переменного тока 4 соединен с основанием 1, к которому с помощью упругих подвесов 2 подвешена ПМ 3, являющаяся подвижным электродом. На крышке ММГ расположены неподвижные электроды 5, 6, которые соединены с соответствующими ПЕН 7, 8. Выходы с ПЕН соединены с вычислительным устройством 9, реализующим функцию вида .
На неподвижных электродах 5, 6 формируют напряжения переменного тока с амплитудой V, полученные емкости C1 конденсатора, образованного ПМ и одним из неподвижных электродов датчика, и С2 конденсатора, образованного ПМ и вторым неподвижным электродом датчика, преобразуют в напряжение (код).
Выходной сигнал с ПЕН 7 будет пропорционален значению емкости C1 и в соответствии с формулой 8 [7] будет зависеть от угла поворота α ПМ вокруг оси вторичных колебаний под действием сил Кориолиса и величины зазора d:

где - V1 - сигнал на выходе первого ПЕН; V и ω - амплитуда и угловая частота соответственно напряжения тока, подаваемого на ПМ; R - сопротивление резистора ПЕН; ε - диэлектрическая проницаемость среды (в вакууме ε=1); ε0 - диэлектрическая постоянная вакуума, равная 8,85⋅10-12; S1 - площадь первого неподвижного электрода; r - радиус электрода.
Для второго преобразователя ПЕН 8 аналогично в соответствии с формулой 9 [7]:

где - V2 - сигнал на выходе второго ПЕН; S2 - площадь второго неподвижного электрода;
Исходя из предположения, что S1=S2=S, дальнейшее сложение и умножение выходных сигналов V1, V2 и последующее деление суммы на произведение приведет к следующему выражению:

Из выражения (3) получаем формулу для определения текущей величины зазора d:

Таким образом, в предложенном устройстве текущая величина зазора определяется с помощью вычислительного устройства 9.
Пример структуры ПЕН может быть представлен в виде схемы, приведенной на фиг. 2, где приняты следующие обозначения:
4 - источник напряжения переменного тока V, подаваемого на ПМ;
10 - конденсатор С1, образованный ПМ и одним из неподвижных электродов емкостного датчика по оси вторичных колебаний;
11 - резистор R1;
12 - операционный усилитель ОУ;
13 - аналого-цифровой преобразователь (АЦП).
Другие варианты ПЕН могут быть выполнены в соответствии с [8].
Техническая реализация ПЕН не влияет на суть работы предлагаемого устройства.
Достижение технического результата изобретения подтверждено математическим моделированием.
Литература
1. В.Я. Распопов. Микромеханические приборы. // Учебное пособие. Тул. гос. университет. Тула, 2002, 392 с.
2. Cenk Acar, Andrei Shkel. MEMS Vibratory Gyroscopes Structural Approaches to Improve Robustness. Springer Science+Business Media, LLC, 2009, 256 c.
3. Патент РФ №2324894.
4. Патент РФ №229630.
5. Патент РФ №2338997.
6. Некрасов Я.А., Павлова С.В., Моисеев Н.В. Оптимизация электродной структуры микромеханического гироскопа RR-типа. // Материалы 20-й Санкт-Петербургской Международной конференции по интегрированным навигационным системам, 2015, с. 294-298.
7. Евстифеев М.И., Ковалев А.С., Елисеев Д.П. Исследование электромеханической модели микромеханического гироскопа RR-типа с учетом вибраций основания. //Гироскопия и навигация, №3 (82), 2013.
8. Arashk Norouzpour-Shirazi. Interface Circuits and Systems for Inertial Sensors. //Tutorials of IEEE Sensors, 2013.
Изобретение относится к микромеханическим гироскопам (ММГ) вибрационного типа, в частности к устройству для измерения зазора между неподвижными электродами и подвижной массой (ПМ). Устройство для измерения зазора между неподвижными электродами канала вторичных колебаний и ПМ в микромеханическом гироскопе RR-типа включает в себя ПМ, дифференциальный емкостный датчик, образованный двумя расположенными по оси вторичных колебаний неподвижными электродами и ПМ, два преобразователя емкость-напряжение (код), входы которых соединены с соответствующими электродами емкостного датчика, и дополнительно введенное вычислительное устройство, реализующее функцию вида  , входы которого соединены с выходами первого и второго преобразователей емкость-напряжение (код), где V1, V2 - сигналы на выходе соответственно первого и второго преобразователей емкость-напряжение (код). Технический результат – повышение точности работы ММГ при работе в жестких условиях. 2 ил.
, входы которого соединены с выходами первого и второго преобразователей емкость-напряжение (код), где V1, V2 - сигналы на выходе соответственно первого и второго преобразователей емкость-напряжение (код). Технический результат – повышение точности работы ММГ при работе в жестких условиях. 2 ил.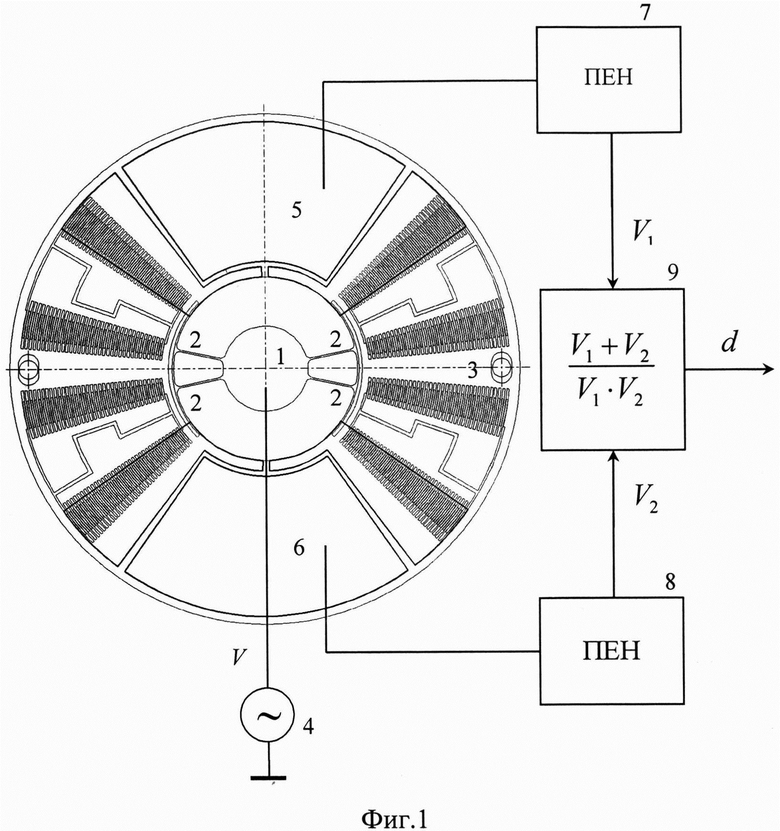
Устройство для измерения зазора между электродами канала вторичных колебаний и подвижной массой в микромеханическом гироскопе RR-типа, включающее в себя подвижную массу (ПМ) на резонансном подвесе, дифференциальный емкостный датчик, образованный двумя расположенными по оси вторичных колебаний неподвижными электродами и подвижной массой, два преобразователя емкость-напряжение (код), входы которых соединены с соответствующими электродами емкостного датчика, отличающееся тем, что дополнительно введено вычислительное устройство, реализующее функцию вида  , входы которого соединены с выходами первого и второго преобразователей емкость-напряжение (код), где V1, V2 - сигналы на выходе соответственно первого и второго преобразователей емкость-напряжение (код).
, входы которого соединены с выходами первого и второго преобразователей емкость-напряжение (код), где V1, V2 - сигналы на выходе соответственно первого и второго преобразователей емкость-напряжение (код).
| СПОСОБ ИЗМЕРЕНИЯ ЗАЗОРА МЕЖДУ ЭЛЕКТРОДАМИ И ПОДВИЖНОЙ МАССОЙ МИКРОМЕХАНИЧЕСКОГО УСТРОЙСТВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2338997C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЯ ПОДВИЖНОЙ МАССЫ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ПО ОСИ ВТОРИЧНЫХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ ДАННОГО СПОСОБА | 2005 |
|
RU2296301C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2010 |
|
RU2447403C1 |
| US 20040035206 A1, 26.02.2004. | |||

