Изобретение относится к гидроакустической технике, конкретнее к области активной гидролокации, в том числе к активным гидролокаторам, предназначенным для обнаружения объектов, измерения координат и параметров движения обнаруженных объектов, классификации обнаруженных объектов.
Известен активный гидролокатор (патент РФ №2346295), содержащий акустические излучающую и приемную антенны, устройство формирования зондирующего сигнала, генераторное устройство, устройство управления, устройство формирования характеристик направленности, блок измерения времени задержки эхо-сигнала относительно момента излучения зондирующего сигнала, блок измерения угла прихода эхо-сигнала в вертикальной плоскости, блок измерения глубины цели. Однако в этом гидролокаторе отсутствует система классификации обнаруженных объектов.
Известен активный гидролокатор с классификацией объекта (патент США №3716823, НКИ 340-3R), содержащий последовательно соединенные устройство управления, устройство формирования зондирующего сигнала, генераторное устройство и излучающую акустическую антенну, последовательно соединенные приемную акустическую антенну, устройство обработки эхо-сигналов от объекта и устройство измерения классификационного параметра (анализатор спектра эхо-сигнала), ячейка памяти с эталонными спектрами эхо-сигналов от известных объектов, вычислительное устройство, с помощью которого производится сравнение спектральных составляющих эхо-сигналов с эталонными спектрами и индикатор.
Недостатком этого устройства является то, что выработка решения о классе обнаруженного объекта производится только по одной посылке, что снижает надежность решения задачи классификации объекта.
По количеству общих признаков наиболее близким аналогом предлагаемого изобретения является активный гидролокатор, содержащий последовательно соединенные устройство управления, устройство формирования зондирующего сигнала, генераторное устройство и излучающую акустическую антенну, последовательно соединенные приемную акустическую антенну, устройство формирования характеристик направленности и устройство обработки эхо-сигналов от объекта, устройство измерения радиальной скорости объекта ВИР, устройство измерения дистанции до объекта Д, устройство измерения курсового угла на объект КУ, блок параметров движения носителя гидролокатора, индикатор, при этом первый выход устройства обработки эхо-сигналов от объекта соединен с входом устройства измерения радиальной скорости объекта ВИР, входом устройства измерения дистанции до объекта Д и входом устройства измерения курсового угла на объект КУ (Справочник по гидроакустике. Евтютов А.П., Колесников А.Е., Корепин Е.А. и др., 2-е изд., Л.: Судостроение, 1988. С.18-26, Миттко В.Б., Евтютов А.П., Гущин С.Е. Гидроакустические средства связи и наблюдения. Л.: Судостроение, 1982. С.125).
Недостатком устройства-прототипа является отсутствие системы классификации обнаруженных объектов, а также системы идентификации при наличии эхо-сигналов от нескольких объектов при излучении серии посылок.
Техническим результатом изобретения является обеспечение высокой вероятности правильной классификации обнаруженного объекта путем реализации возможности выработки класса обнаруженного объекта по совокупности посылок. Кроме того, для эффективной работы гидролокатора с классификацией и выработкой решения о классе объекта по совокупности посылок обеспечивается идентификация эхо-сигналов в серии посылок.
Для достижения указанного технического результата в активный гидролокатор, содержащий последовательно соединенные устройство управления, устройство формирования зондирующего сигнала, генераторное устройство и излучающую акустическую антенну, также содержащий последовательно соединенные приемную акустическую антенну, устройство формирования характеристик направленности и устройство обработки эхо-сигналов от объекта, также содержащий устройство измерения радиальной скорости объекта (ВИР), устройство измерения дистанции до объекта (Д), устройство измерения курсового угла на объект (КУ), блок параметров движения носителя гидролокатора и индикатор, при этом первый выход устройства обработки эхо-сигналов от объекта соединен с входом устройства измерения ВИР, входом устройства измерения Д и входом устройства измерения КУ, введены новые признаки, а именно блок памяти ВИР, Д, КУ, блок сравнения Д, блок сравнения КУ, блок идентификации координат объекта по ряду посылок, последовательно соединенные устройство измерения классификационного параметра, блок определения PапостN, где PапостN - апостериорная плотность вероятности класса объекта по текущей посылке N, блок определения PапостF, где PапостF - апостериорная плотность вероятности класса объекта по совокупности посылок F и блок выработки решения о классе объекта по совокупности посылок, также введен блок памяти Pапр, где Pапр - априорная плотность распределения величины классификационного параметра, блок памяти PапостF, при этом второй выход устройства обработки эхо-сигналов от объекта соединен с входом устройства измерения классификационного параметра, выходы устройства измерения ВИР, устройства измерения Д, устройства измерения КУ соединены с первым входом блока памяти ВИР, Д, КУ, второй выход устройства управления соединен со вторым входом блока памяти ВИР, Д, КУ, а первый и второй выходы последнего соединены с первыми входами блока сравнения Д и блока сравнения КУ соответственно, первый и второй выходы блока параметров движения носителя гидролокатора соединены со вторыми входами блока сравнения Д и блока сравнения КУ соответственно, выходы блока сравнения Д и блока сравнения КУ соединены с первым и вторым входом блока идентификации координат объекта по ряду посылок, а его выход соединен со вторым входом блока определения PапостF, выход блока памяти Pапр соединен со вторым входом блока определения PапостN, второй выход блока определения PапостF соединен со входом блока памяти PапостF, а его выход соединен с третьим входом блока определения PапостF, выход блока выработки решения о классе объекта по совокупности посылок соединен с входом индикатора.
Указанный технический результат достигается за счет того, что определение класса обнаруженного объекта производится по совокупности посылок, причем выполняется идентификация эхо-сигналов при излучении серии посылок, с учетом возможности обнаружения разных объектов в различных посылках, например в обзорном режиме работы гидролокатора. При этом для выработки решения о классе по отдельным посылкам используются статистические методы классификации (см. Горелик А.Л., Скрипкин В.А. Методы распознавания. М.: Высш. школа, 1984. С.26-32), основанные на использовании априорных плотностей вероятности величин классификационного параметра для объектов различных классов Pапр (известные заранее распределения вероятности величин классификационного параметра для объектов разных классов) и на определении после обнаружения эхо-сигнала апостериорных вероятностей наличия объектов этих классов Pапост (вероятности отнесения обнаруженного объекта к данному классу с учетом измеренной на отдельной посылке величины классификационного параметра). Технический результат получается при совместной работе вновь введенных блоков, связей между ними и связей этих блоков с другими блоками гидролокатора.
Сущность изобретения поясняется на фиг.1, где приведена блок-схема предложенного активного гидролокатора.
Активный гидролокатор содержит последовательно соединенные устройство 5 управления, устройство 4 формирования зондирующего сигнала, генераторное устройство 3 и излучающую акустическую антенну 1, последовательно соединенные приемную акустическую антенну 2, устройство 6 формирования характеристик направленности и устройство 7 обработки эхо-сигналов от объекта, устройство 8 измерения ВИР, устройство 9 измерения Д, устройство 10 измерения КУ, блок 13 параметров движения носителя гидролокатора, индикатор 22, при этом первый выход устройства 7 соединен с входом устройства 8, входом устройства 9 и входом устройства 10. Также активный гидролокатор содержит блок 12 памяти ВИР, Д, КУ, блок 14 сравнения Д, блок 15 сравнения КУ, блок 16 идентификации координат объекта по ряду посылок, последовательно соединенные устройство 11 измерения классификационного параметра, блок 18 определения PапостN, блок 19 определения PапостF и блок 21 выработки решения о классе объекта по совокупности посылок, блок 17 памяти Pапр, блок 20 памяти PапостF, при этом второй выход устройства 7 соединен с входом устройства 11, выходы устройства 8, 9, 10 соединены с первым входом блока 12, второй выход устройства 5 соединен со вторым входом блока 12, а его первый и второй выходы соединены с первыми входами блоков 14 и 15 соответственно, первый и второй выходы блока 13 соединены со вторыми входами блоков 14 и 15 соответственно, выходы блока 14 и блока 15 соединены с первым и вторым входом блока 16, а его выход соединен со вторым входом блока 19, выход блока 17 соединен со вторым входом блока 18, второй выход блока 19 соединен с входом блока 20, а его выход соединен с третьим входом блока 19, выход блока 21 соединен с входом индикатора 22.
Практическое исполнение блоков, входящих в изобретение, известно из практики гидроакустики.
Блоки памяти 12, 17 и 20 могут быть реализованы на основе технических решений, приведенных в книге Проектирование импульсных и цифровых устройств радиотехнических систем. / Цифровые радионавигационные устройства. / В.В. Барашенков, А.Е. Лутченко, Е.М. Скороходов и др. Под ред. В.Б. Смолова. М.: Сов. радио, 1980. С.196-200.
Блоки 11 14, 15. 18, 19 могут быть реализованы с применением микропрограммных дискретных устройств, см., например, книгу Проектирование импульсных и цифровых устройств радиотехнических систем. / Гришин Ю.П., Казаринов Ю.М., Катиков В.М. и др. Под ред. Ю.М. Казаринова. М.: Высш. шк., 1985. С.164-177.
Блоки 16, 21 выполняются с использованием схемы сравнения, см., например, книгу Проектирование импульсных и цифровых устройств радиотехнических систем. / Гришин Ю.П., Казаринов Ю.М., Катиков В.М. и др. Под ред. Ю.М. Казаринова. - М.: Высш. шк., 1985. С.15.
Работа устройства осуществляется следующим образом. Устройство 4 формирования зондирующего сигнала вырабатывает зондирующие сигналы. Гидролокатор производит излучение зондирующего сигнала с помощью генераторного устройства 3 и излучающей акустической антенны 1. Отраженный от объекта эхо-сигнал с выхода приемной акустической антенны 2 поступает на устройство 6 формирования характеристик направленности. С выхода устройства 6 сигнальный массив поступает на устройство 7, обеспечивающее обработку принятых сигналов, и при обнаружении эхо-сигналов от объекта в устройстве 8 производится измерение ВИР, в устройстве 9 производится измерение Д, в устройстве 10 производится измерение КУ, а в устройстве 11 производится измерение классификационного параметра.
Измеренные параметры ВИР, Д и КУ на каждой посылке поступают и запоминаются в блоке 12.
Устройство 5 управляет во времени формированием зондирующего сигнала (блок 4) и соответственно работой генераторного устройства 3, а также блоком 12, что позволяет работать системе идентификации.
При управлении устройства 5 из блока 12 в блоки 14, 15 поступают измеренные значения Д, ВИР, КУ по двум последовательным посылкам, а также величина скорости носителя гидролокатора из блока 13.
В блоке 14 производится сравнение двух дистанций до объекта на текущей (j+1) и предыдущей (j) посылке, например, по соотношению
ΔД=|(Дj+1-Дj)-ΔT·(ВИРj-Vн·cos(КУj))|,
где Дj - измеренная дистанция до объекта на j-й посылке;
Дj+1 - измеренная дистанция до объекта на j+1 посылке;
ВИРj - измеренная радиальная скорость объекта на j-й посылке;
ΔT - временной интервал между j и j+1 посылкой;
Vн - скорость носителя гидролокатора,
КУj - измеренный курсовой угол на объект на j-й посылке.
В блоке 15 производится сравнение двух значений КУ с учетом скорости носителя, например, по соотношению

где КУj+1 - измеренный курсовой угол на объект на j+1 посылке.
В блок 16 из блока 14 и блока 15 передаются вычисленные значения ΔД и ΔКУ, где эти значения сравниваются с пороговыми величинами и принимается решение об идентификации объекта в двух последовательных посылках.
В блоке 18 на основе априорных вероятностей величин классификационного параметра Pапр, поступающих из блока 17, и измеренной величины классификационного параметра Uизм, поступающего из блока 11, производится определение PапостN, например, для объектов двух классов A1 и A2 по формуле:
где Pапр,I (Uизм) - выработанное в блоке 18 значение априорной плотности распределения вероятностей i-го класса (i=1, 2) при измеренной величине классификационного параметра;
PапостN,i - вычисленная величина апостериорной вероятности по текущей посылке для объекта i-го класса.
Вычисленная величина PапостN поступает в блок 19, где на первой посылке n=1 (n - номер посылки) величина PапостN передается в блок 21 и запоминается в блоке 20 как величина PапостF. На второй посылке при выработке признака идентификации в блоке 16 вычисляется PапостF на основе соотношения, например, для двух альтернативных классов:
где PапостN,i - вычисленная величина апостериорной вероятности по текущей посылке;
 - вычисленная величина апостериорной вероятности по совокупности предыдущих посылок;
- вычисленная величина апостериорной вероятности по совокупности предыдущих посылок;
n - номер текущей посылки.
Вычисленная величина  запоминается в блоке 20 и выдается в блок 21.
запоминается в блоке 20 и выдается в блок 21.
На третьей посылке вычисляется PапостF по величине  , по совокупности предыдущих посылок (первая и вторая посылка) и величине PапостN по третьей посылке. На четвертой посылке вычисляется PапостF по величине
, по совокупности предыдущих посылок (первая и вторая посылка) и величине PапостN по третьей посылке. На четвертой посылке вычисляется PапостF по величине  , по совокупности предыдущих посылок (1, 2 и 3 посылки) и величине PапостN по четвертой посылке и т.д.
, по совокупности предыдущих посылок (1, 2 и 3 посылки) и величине PапостN по четвертой посылке и т.д.
В блоке 21 вырабатывается решение о классе объекта на основе PапостF, например, по максимуму из вычисленных апостериорных вероятностей  и
и  , и решение о классе обнаруженного объекта выдается оператору на индикатор 22.
, и решение о классе обнаруженного объекта выдается оператору на индикатор 22.
Использование блока памяти ВИР, Д, КУ, блока сравнения Д, блока сравнения КУ, блока идентификации координат объекта по ряду посылок, устройства измерения классификационного параметра, блока определения PапостN, блока определения PапостF, блока выработки решения о классе объекта по совокупности посылок, блока памяти Pапр, блока памяти PапостF с соответствующими связями между этими блоками и связями этих блоков с другими блоками активного гидролокатора обеспечивает высокую вероятность правильной классификации обнаруженного объекта путем реализации возможности выработки класса обнаруженного объекта по совокупности посылок с идентификацией эхо-сигналов в серии посылок.
Таким образом поставленная задача успешно решается.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКТИВНЫЙ ГИДРОЛОКАТОР С КЛАССИФИКАЦИЕЙ ОБЪЕКТА | 2013 |
|
RU2528114C1 |
| Активный гидролокатор с классификацией объекта | 2021 |
|
RU2785403C1 |
| Гидролокационный способ классификации подводных объектов в контролируемой акватории | 2017 |
|
RU2650419C1 |
| Способ классификации эхо-сигнала гидролокатора | 2017 |
|
RU2660219C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ГИДРОЛОКАТОРА БЛИЖНЕГО ДЕЙСТВИЯ | 2016 |
|
RU2626295C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СИГНАЛА ОТ ЦЕЛИ | 2011 |
|
RU2473924C1 |
| Способ обработки гидролокационной информации | 2017 |
|
RU2657121C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ОБЪЕКТА | 2012 |
|
RU2516602C1 |
| Способ определения скорости звука | 2021 |
|
RU2776959C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОБЪЕКТОВ В ВОДНОЙ СРЕДЕ | 2015 |
|
RU2585401C1 |
Использование: гидроакустическая техника, а именно область активной гидролокации, включая активные гидролокаторы, предназначенные для обнаружения объектов, измерения координат и параметров движения обнаруженных объектов, классификации обнаруженных объектов. Технический результат: обеспечивается высокая вероятность правильной классификации обнаруженного объекта. Это достигается путем реализации возможности выработки класса обнаруженного объекта по совокупности посылок с идентификацией эхо-сигналов в серии посылок. 1 ил.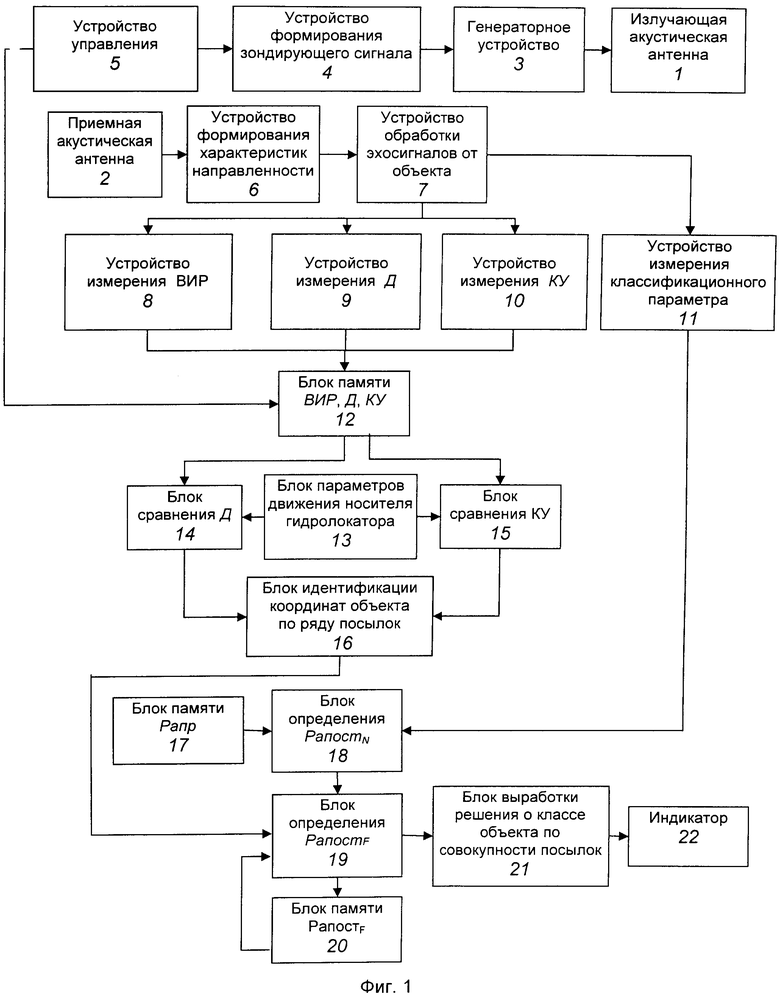
Активный гидролокатор, содержащий последовательно соединенные устройство управления, устройство формирования зондирующего сигнала, генераторное устройство и излучающую акустическую антенну, также содержащий последовательно соединенные приемную акустическую антенну, устройство формирования характеристик направленности и устройство обработки эхо-сигналов от объекта, также содержащий устройство измерения радиальной скорости объекта (ВИР), устройство измерения дистанции до объекта (Д), устройство измерения курсового угла на объект (КУ), блок параметров движения носителя гидролокатора и индикатор, при этом первый выход устройства обработки эхо-сигналов от объекта соединен с входом устройства измерения ВИР, входом устройства измерения Д и входом устройства измерения КУ, отличающийся тем, что в него введены блок памяти ВИР, Д, КУ, блок сравнения Д, блок сравнения КУ, блок идентификации координат объекта по ряду посылок, последовательно соединенные устройство измерения классификационного параметра, блок определения PапостN, где PапостN - апостериорная плотность вероятности класса объекта по текущей посылке N, блок определения PапостF, где PапостF - апостериорная плотность вероятности класса объекта по совокупности посылок F и блок выработки решения о классе объекта по совокупности посылок, также введен блок памяти Pапр, где Pапр - априорная плотность распределения величины классификационного параметра, блок памяти PапостF, при этом второй выход устройства обработки эхо-сигналов от объекта соединен с входом устройства измерения классификационного параметра, выходы устройства измерения ВИР, устройства измерения Д, устройства измерения КУ соединены с первым входом блока памяти ВИР, Д, КУ, второй выход устройства управления соединен со вторым входом блока памяти ВИР, Д, КУ, а первый и второй выходы последнего соединены с первыми входами блока сравнения Д и блока сравнения КУ соответственно, первый и второй выходы блока параметров движения носителя гидролокатора соединены со вторыми входами блока сравнения Д и блока сравнения КУ соответственно, выходы блока сравнения Д и блока сравнения КУ соединены с первым и вторым входом блока идентификации координат объекта по ряду посылок, а его выход соединен со вторым входом блока определения PапостF, выход блока памяти Pапр соединен со вторым входом блока определения PапостN, второй выход блока определения PапостF соединен со входом блока памяти PапостF, а его выход соединен с третьим входом блока определения PапостF, выход блока выработки решения о классе объекта по совокупности посылок соединен со входом индикатора.
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2009 |
|
RU2408897C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2008 |
|
RU2384863C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2007 |
|
RU2346295C1 |
| Способ прессования труб с внутренними ребрами и утолщениями | 1957 |
|
SU114169A1 |
| Устройство для транспортирования и складирования сыпучих материалов, выгружаемых из вагонов | 1947 |
|
SU75061A1 |
| Секционный питатель с вертикальной осью вращения для сыпучих материалов | 1955 |
|
SU108858A1 |
| JP2002006037 A, 09.01.2002 | |||

