Изобретение относится к области гидроакустики и может быть использовано в задачах определения класса цели при разработке гидроакустических систем.
Наибольший интерес классификация морских целей представляет на дистанциях близких к дистанции их обнаружения, т.е. при малых значениях отношения сигнал/помеха. Поэтому сокращение времени принятия решения по классификационным признакам (КП), связанным с измерением параметров амплитудной модуляции (AM), обусловленной качкой и вально-лопастной модуляцией, проявляющейся на низких и сверхнизких частотах, является актуальным. Особенно важно сократить время определения классификационных признаков (КП), связанных с низкочастотной и сверхнизкочастотной модуляцией, время на оценку которых доходит от двух до десяти минут. Длительное время, порядка 200-300 с требуется и на оценку КП по периоду флюктуаций частоты дискретной составляющей.
В работе [Брага Ю.А., Машошин А.И., Подшивалов Г.А. Алгоритм информационной поддержки оператора гидроакустического комплекса подводной лодки // Морская радиоэлектроника. - 2018. - №3. - С. 22-26] обосновывается целесообразность развития автоматизированных алгоритмов обнаружения целей заданного класса на максимально возможных дальностях с одновременной их классификацией. При автоматизированной классификации целей ответственность за принятие всех решений лежит на операторе, начиная с момента приема сигнала представленного оператору в наглядном (как правило, в спектрально-графическом) виде.
Наиболее близким к предлагаемому способу по количеству общих признаков является способ классификации, описанный в статье [Машошин А.И. Оптимизация устройства обнаружения и измерения параметров амплитудной модуляции подводного шумоизлучения морских судов // Акустический журнал. - 2013. - Т. 59. - №3. С. 347-358].
Способ-прототип содержит следующие операции:
• прием антенной сигналов шумоизлучения морской цели;
• выбор полосы частот шума, где fн, fв - нижняя и верхняя частоты полосы шума, в которой выделяется амплитудная модуляция (AM) из спектра модулированного шума цели;
• выделение амплитудной огибающей (АО), для чего используют амплитудный детектор (двухполупериодный линейный детектор);
• ограничение диапазона частот огибающей, в которой содержится дискретный спектр вально-лопастной модуляции (ВЛМ) и модуляции качкой (МК) с помощью фильтра нижних частот (ФНЧ);
• вычисление энергетического спектра АО с помощью спектроанализатора (обнаружение в накопленном спектре АО дискретных составляющих (ДС) вально-лопастного звукоряда (ВЛЗР) - ДСВЛЗР и дискретных составляющих, обусловленных качкой, - ДСМК и измерение их параметров).
Недостатком этого способа является то, что с момента обнаружения цели до ее классификации проходит достаточно длительное время (от десятка секунд до десятка минут) в зависимости от класса цели, что является решающим фактором для принятия командиром эффективного плана взаимодействия с обнаруженной морской целью.
Задачей изобретения является сокращение времени принятия решения по КП. Особенно важно сократить время выработки решения по КП, связанных с низкочастотной и сверхнизкочастотной модуляцией, время на оценку которых доходит от двух до десяти минут.
Технический результат изобретения заключается в обеспечении сокращения времени принятия решения по КП связанных с амплитудной модуляцией сигналов шумоизлучения целей.
Для обеспечения указанного технического результата в способ классификации гидроакустических сигналов шумоизлучения морской цели, содержащий прием антенной сигнала шумоизлучения морской цели, преобразование сигнала в цифровой вид, спектральную обработку принятого сигнала, включающую формирование характеристик направленности (ФХН), накопление полученных спектров мощности, обнаружение морской цели с заданной вероятностью, выделение амплитудной огибающей (АО) принятого сигнала в канале автоматического сопровождения морской цели (АСЦ) по обнаруженной морской цели с помощью обратного преобразования Фурье (ОБПФ) и низкочастотной фильтрации, вычисление энергетического спектра мощности АО принятого сигнала шумоизлучения морской цели с помощью быстрого преобразования Фурье (БПФ), обнаружение в накопленном спектре АО дискретных составляющих (ДС) ВЛМ и МК, измерение их параметров для принятия решения о классе морской цели с выводом решения о классе морской цели на индикатор введены новые признаки, а именно: до выделения АО по обнаруженной с заданной вероятностью морской цели, АСЦ наводят на первичные отметки локальных максимумов на фоне шумов предполагаемой морской цели на частотно-пространственном фрагменте индикатора, сигнал с выхода АСЦ запоминают со скользящим накоплением с возможностью наблюдения массива накопленной информации начиная с момента появления первичных отметок локальных максимумов на индикаторе, измерение классификационных параметров по АО для принятия решения о классе морской цели производят по выбранному из памяти массиву, который обрабатывают единовременно с обнаружением морской цели с заданной вероятностью.
Сущность изобретения заключается в сокращении времени принятия решения задач классификации за счет обращения с момента обнаружения цели к результатам обработки блока памяти АСЦ с момента наведения оператором АСЦ на первичные отметки локальных максимумов предполагаемой цели при малых значениях отношения сигнал/помеха. Особенно это важно в условиях интерференционной структуры поля для принятия решения по КП, связанных с низкочастотной и сверхнизкочастотной модуляцией и периодом флюктуации ДС, которая возникает при изменении координат точек приема и излучения или при изменении частоты монохроматического источника звука, основанный на когерентном сложении лучей или волноводных мод [Толстой И., Клей К.С. Акустика океана: Теория и эксперимент в подводной акустике: Пер. с англ. - Мир, 1969. 301 с.].
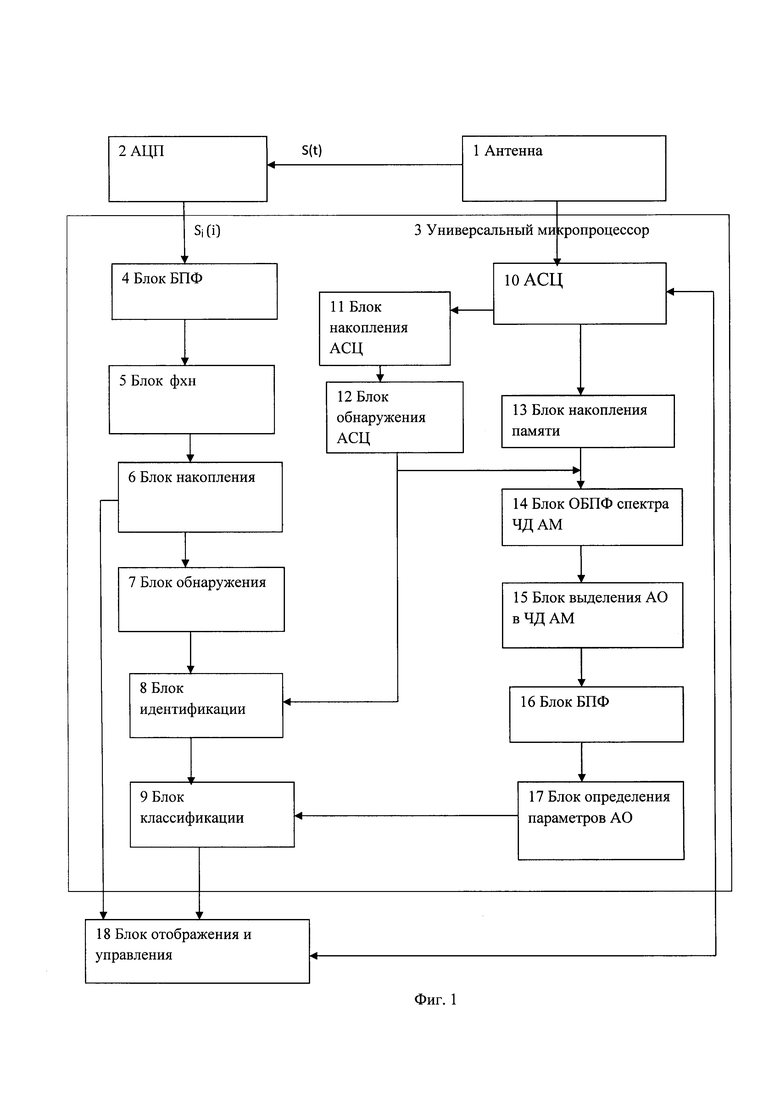
Сущность изображения поясняется фиг. 1, где приведена блок-схема устройства, реализующего предложенный способ.
Устройство (фиг. 1) содержит гидроакустическую антенну 1, которая соединена через аналого-цифровой преобразователь 2 (АЦП) с универсальным микропроцессором 3. В состав универсального микропроцессора входят последовательно соединенные блок 4 быстрого преобразования Фурье (БПФ), выход которого соединен с блоком 5 формирования характеристик направленности (ФХН), выход блока 5 соединен с входом блока 6 накопления. Выход блока 6 соединен с входом блока 7 обнаружения и второй выход блока 6 соединен с входом блока 18 отображения и управления. Выход блока 7 соединен с входом блока 8 идентификации и второй вход блока 8 соединен с блоком 12 обнаружения в АСЦ, выход блока 8 соединен с входом блока 9 классификации. Выход блока 9 соединен со вторым входом блока 18 отображения и управления. Второй выход блока 1 соединен с входом блока 10 АСЦ второй вход, которого соединен с выходом блока18. Выход блока 10 соединен с входом блока 11 накопления тракта АСЦ выход, которого соединен с блоком 12 обнаружения в тракте АСЦ. Второй выход блока 10 соединен с блоком скользящей памяти 13. Выход блока 12 соединен с блоком идентификации 8, а второй выход соединен с входом блока скользящей памяти. 13. Выход блока 13 соединен последовательно с блоком 14 ОБПФ, блоком 15 выделения АО в ЧД AM, блоком 16 БПФ, блоком 17 определения параметров АО, выход которого соединен с блоком классификация 9.
Блок 2 может быть выполнен так, как это описано в справочнике [Гольденберг Л.М. и др. Цифровая обработка сигналов: Справочник. - Радио и связь, 1985 г. 91 с]. Блок 3 универсального микропроцессора с блоком 5 ФХН и блоком памяти 13 могут быть выполнены на основе современного универсального микропроцессора, обладающего способностью работать в реальном времени, возможностью перехода с одной задачи на другую, наличием гибкой адресации к памяти, большой скоростью обработки данных как описано в книге [Корякин Ю.А., Смирнов С.А., Яковлев Г.В. «Корабельная гидроакустическая техника». СПб. Наука. - 2004. С. 248-250, 284 с.]. Блоки 4 и 16 БПФ, а также блок 14 ОБПФ могут быть выполнены, как описано в книге [Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов. - Рипол Классик, 1978. С. 633-640].
Блоки 6 и 11 накопления описаны, например, в книге [Харкевич А.А. Борьба с помехой. - Наука, 1965. С. 70-71]. Выработка решения об обнаружении цели в блоках 7 и 12 могут быть реализованы, как, например, описано в книге [Гутина Л.С.Теория оптимальных методов радиоприема при флуктуационных помехах. - 1961. с. 247-253]. Блок 8 может быть реализован, как, например, в статье [Шейман Е.Л. Методы идентификации и нумерации обнаруженных объектов в интегрированных системах подводного наблюдения // Гидроакустика. - 2019. №40. С. 88-94]. Блок 10 тракта АСЦ может быть реализован, как описан в книге [Лоскутова Г.В. Пространственно-частотные и частотно волновые методы описания и обработки гидроакустических полей. - Наука, 2007. Главы 5.2, 5.4 С. 140-161, с. 169-179]. Блоки 15 и 17 выделения АО могут быть реализованы, как показано в статье [Машошин А.И. Оптимизация устройства обнаружения и измерения параметров амплитудной модуляции подводного шумоизлучения морских судов // Акустический журнал. - 2013. Т. 59. - №3. С. 347-353].
Блок 15 содержит амплитудный детектор, ФНЧ, с помощью которого ограничивается диапазон частот огибающей, в котором содержится дискретный спектр вально-лопастной модуляции (ВЛМ) и модуляции качкой (МК), (на фиг. 1 не показаны) [Машошин А.И. Оптимизация устройства обнаружения и измерения параметров амплитудной модуляции подводного шумоизлучения морских судов // Акустический журнал. - 2013. Т. 59. - №3. С. 347-353].
Блок 18 может быть выполнен так, как описан в книге [Корякин Ю.А., Смирнов С.А., Яковлев Г.В. «Корабельная гидроакустика», Санкт- Петербург: Наука, 2004. С. 255-261].
Реализацию способа целесообразно описать на примере работы устройства (фиг. 1)
Сигналы Si(t) приемных каналов антенны с выхода блока 1 поступают на вход блока 2 АЦП, сигнал Si(k) из АЦП в виде дискретных отсчетов поступают соответственно в блок 4 БПФ, который реализуется в блоке 3 универсального микропроцессора для получения комплексных спектров Si(ωк) для каждого элемента антенны. В блок 5 ФХН из блока 4 поступают отсчеты реализации комплексного спектра сигнала для каждого элемента антенны для формирования характеристик направленности, а с выхода блока 5 ФХН в блок 6 накопления поступают спектры Sj(ωк) с веера характеристик направленности.
Накопленные в блоке 6 временные последовательности спектров мощности поступают в блок 7 обнаружения и далее в блок идентификации 8, а второй выход блока 6 соединен с входом блока 18 отображения и управления, в котором на индикатор выводится фрагмент пространственно-частотной информации, по которому оператор берет морскую цель на сопровождение трактом АСЦ (блок 10) с устройством памяти для предотвращения срыва сопровождения при уходе сигнала на минимум при малых отношениях сигнал/помеха, т.к. в условиях интерференционной структуры поля следящая система работает в условиях периодического пропадания сигнала на входе дискриминатора угла (ДУ), вызванного глубокими амплитудными флюктуациями [«Статистическая динамика радиотехнических следящих систем» С.В. Первачев, А.А. Валуев, В.М. Чиликин, Москва, «Советское радио», 1973, с. 140-151]. Блок 10 АСЦ, который содержит блок формирования двух соосных характеристик направленности (ХН), осуществляет выдачу спектров сигнала на классификацию, ДУ с памятью, определяющий оценку угла рассогласования между направлением оси ХН (опорным направлением) и направлением прихода фронта волны сигнала. С момента наведения АСЦ на локальный максимум предполагаемой цели на пространственно-частотном фрагменте индикатора (блок 18) информация с выхода АСЦ поступает в блок памяти, а со второго выхода информация поступает в блок накопления 11, а затем в блок 12 обнаружения цели. При этом по факту автоматического обнаружения сигнала в блоке 12 происходит обращение к блоку памяти. Выбранный из памяти массив обрабатывается единовременно (в масштабе времени микропроцессора) штатными алгоритмами выработки параметров АО (блоки 15, 16, 17). Определение классификационных параметров АО в реальном масштабе времени с учетом результатов обработки памяти поступает в блок классификации 9. Решение о классе цели с ее координатами из блока 8, в котором решается задача объединения информации, поступающей из различных информационных каналов системы по обнаруженной цели, поступают в блок 18 отображения и управления одновременно с обнаружением морской цели с заданной вероятностью.
Таким образом, технический результат, заключающийся в сокращении времени определения классификационных признаков в АО, что способствует сокращению времени между моментом обнаружения морской цели с заданной вероятностью и определением класса цели, можно считать достигнутым.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ классификации шумоизлучения морского объекта | 2021 |
|
RU2776958C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морского объекта | 2020 |
|
RU2754602C1 |
| СПОСОБ КЛАССИФИКАЦИИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКОГО ОБЪЕКТА | 2015 |
|
RU2603886C1 |
| Способ панорамной классификации шумящих объектов | 2017 |
|
RU2684439C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морского объекта | 2023 |
|
RU2824054C1 |
| Способ обнаружения и классификации гидроакустических сигналов шумоизлучения морского объекта | 2019 |
|
RU2726291C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морского объекта | 2022 |
|
RU2801677C1 |
| Способ определения глубины морского объекта с использованием шумопеленгаторной станции с донной линейной многоэлементной антенной | 2024 |
|
RU2838637C1 |
| СПОСОБ КЛАССИФИКАЦИИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКОГО ОБЪЕКТА | 2013 |
|
RU2546851C1 |
| Способ определения маневра шумящего объекта | 2019 |
|
RU2719626C1 |
Использование: изобретение относится к области гидроакустики и может быть использовано в задачах классификации целей при разработке гидроакустических систем. Технический результат: обеспечение сокращения времени определения классификационных признаков в АО, что способствует сокращению времени между моментом обнаружения цели с заданной вероятностью и определением класса цели. Сущность: в предложенном способе используется скользящая память при наведении оператором канала автоматического сопровождения на индикаторе на локальные максимумы предполагаемого объекта, при малых отношениях сигнал/помеха. Принятие решения о классе морского объекта производят по выбранному из памяти массиву, который обрабатывают единовременно с обнаружением морского объекта с заданной вероятностью. 1 ил.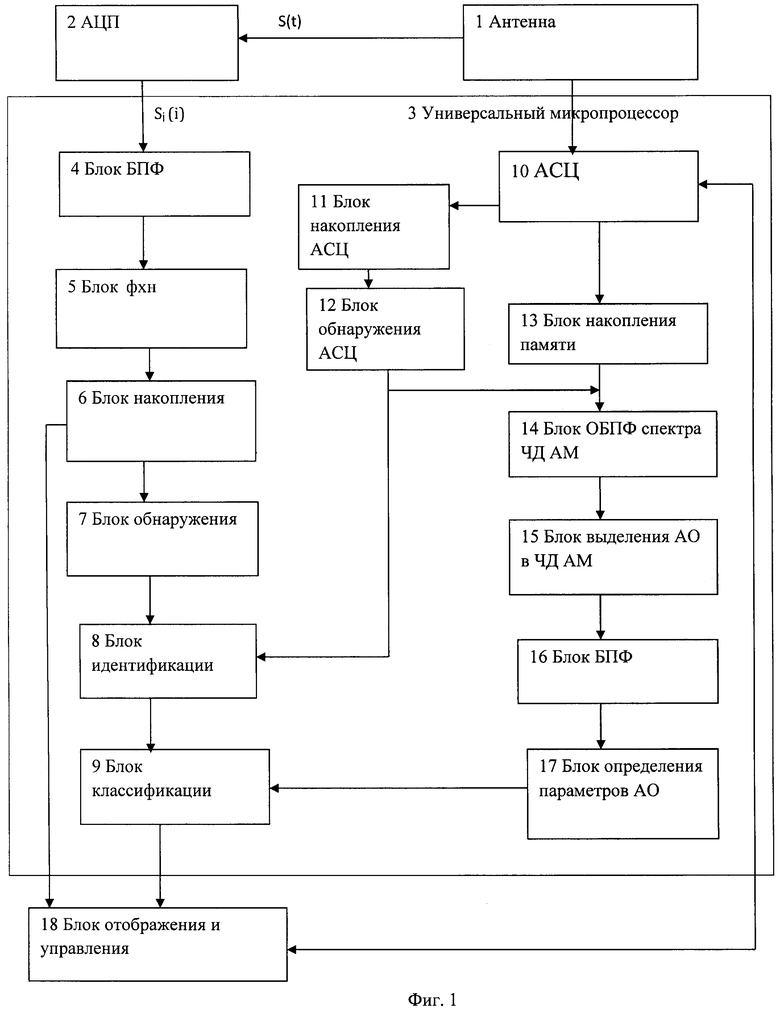
Способ классификации гидроакустических сигналов шумоизлучения морской цели, содержащий прием антенной сигнала шумоизлучения морской цели, преобразование сигнала в цифровой вид, спектральную обработку принятого сигнала, включающую формирование статического веера характеристик направленности, накопление полученных спектров мощности, обнаружение морской цели с заданной вероятностью, выделение амплитудной огибающей (АО) принятого сигнала в канале автоматического сопровождения (АСЦ) морской цели с помощью обратного преобразования Фурье и низкочастотной фильтрации, вычисление энергетического спектра мощности АО принятого сигнала шумоизлучения морской цели с помощью быстрого преобразования Фурье, обнаружение в накопленном спектре АО дискретных составляющих вально-лопастной модуляции и модуляции качкой и измерение их параметров для принятия решения о классе морской цели с выводом решения о классе цели на индикатор, отличающийся тем, что до выделения АО по обнаруженной с заданной вероятностью морской цели, АСЦ наводят на первичные отметки локальных максимумов на фоне шумов предполагаемой морской цели на частотно-пространственном фрагменте индикатора, сигнал с выхода АСЦ запоминают со скользящим накоплением с возможностью наблюдения массива накопленной информации начиная с момента появления первичных отметок локальных максимумов на индикаторе, а измерение классификационных параметров по АО для принятия решения о классе морской цели производят по выбранному из памяти массиву, который обрабатывают единовременно с обнаружением морской цели с заданной вероятностью.
| Способ обработки сигнала шумоизлучения цели | 2022 |
|
RU2776442C1 |
| Способ обнаружения и классификации морских целей на базе нейросетевых технологий и элементов искусственного интеллекта | 2021 |
|
RU2780606C1 |
| Способ классификации шумоизлучения морского объекта | 2021 |
|
RU2776958C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морского объекта | 2020 |
|
RU2759498C1 |
| Способ отображения гидроакустической информации | 2019 |
|
RU2736188C1 |
| Способ обнаружения и классификации гидроакустических сигналов шумоизлучения морского объекта | 2019 |
|
RU2726291C1 |
| CN 107682297 B, 14.07.2020. | |||
